はじめに
今日、画像のセットからオブジェクトやシーンの3Dモデルを構築するためのソフトウェア製品がすべて揃っています(たとえば、123D AutodeskやPhotomodeller)。 このようなプログラムの使用に関する説明は、 http: //habrahabr.ru/post/134781/およびhttp://habrahabr.ru/post/64080/の記事に記載されています。 この記事では、この問題を解決するための一般的な方法論と、各段階の機能について説明します。 この記事は主にこのトピックから「遠い」人を対象としていますが、そこでどのように機能し、一般的に何が得られるかを理解したいと思っています。
一般的なスキームの説明
まず、オブジェクトを撮影するための要件について説明します(図1を参照)。 撮影された空間領域のフレームのペア間のオーバーラップは、50%を下回らないようにする必要があります(そうしないと、モデルにギャップが生じます)。 さらに、このような調査では、3つの隣接する画像が重複していることを確認する必要があります(たとえば、図1では、1,2,3または4,5,6を隣接する画像と見なすことができます)。 したがって、結果の3Dモデルは1つのスケールパラメーターのみによって決定されます。

図1.オブジェクトを撮影するスキーム

図2. 3Dモデルを構築するための画像の例
ここで、一連の画像があるとしましょう(図2を参照)。 さらに、画像を処理するとき(つまり、画像内のオブジェクトの同一点を検索し、見つかった対応に基づいて非線形方程式系を解く)、カメラのパラメーター(焦点距離など)と各撮影時のカメラの位置/向きを決定しますそれらの1つに関連する画像(基本、たとえば最初のもの、図3を参照)。

図3.オリエンテッドショット
方向付けされた画像の場合、隣接する画像のペアですべての同一のポイントが検索され(いわゆる密マップまたは深度マップ)、その後、空間内のポイントの位置(図4を参照)がベース画像の座標系で計算されます(計算されたカメラパラメーターに基づいて:焦点距離位置/方向など)。
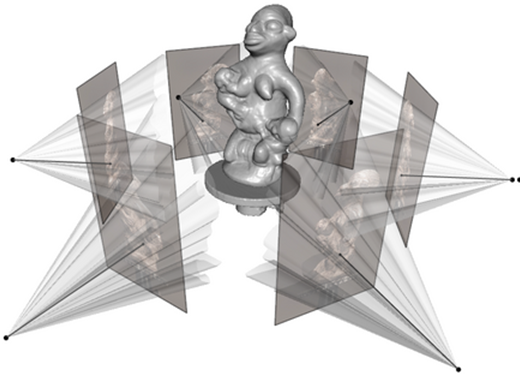
図4.オブジェクトの3Dモデル
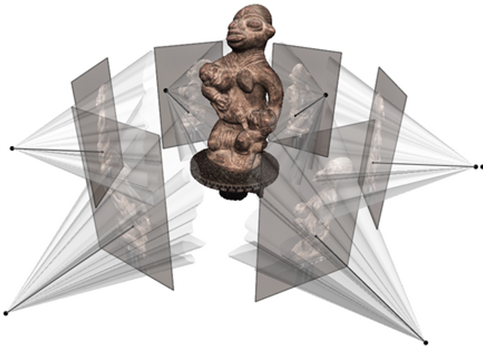
図5.オブジェクトのテクスチャ3Dモデル
原則として、多くのポイントは三角形フレーム(図6を参照、フレームの構築はDelaunay三角形に基づいています)の形で表され、その後のテクスチャリング(たとえば、OpenGLを使用した図5を参照)や画像の変換に便利です。

図6.オブジェクトの三角形分割モデル(ソース、 habrahabr.ru / post / 134781 )
使用されたアルゴリズムと同様に、各段階の詳細はこの作品で見つけることができます。
おわりに
説明されている技術は、航空写真、モバイルマッピングなどに従って地形モデルを構築するために、ほとんどの最新の商用ソフトウェア製品で使用されています。 さらに、完全自動処理を備えたすべての123Dタイプのソフトウェアは完全に無料ですが、結果を保証するものではありません(それぞれ、そこに正確さはありません)。結果が必要な場合は、支払う必要があり、各処理段階を制御するために特別に作成された機能があります。