
今回、規制は実際の戦闘、つまりロボットの戦闘を規定していませんでした。 このトーナメントは、特に国際大会の予選であったため、より多くのスポーツでした。
ロボット自体について簡単に説明します。 ロボットはレゴマインドストームの子供用デザイナーで作られていますが、これは多くの人が子供の頃から知っているレゴのおもちゃとは異なります。 このシリーズは、創造性と真剣な研究のための本当に強力なツールです。 設計者は建築材料としてのみ機能し、一連のセンサー、電動モーター、ギア、シャフト、プーリー、バッテリー、および制御ユニットが取り付けられています。 すべてが大きな箱に収まります。

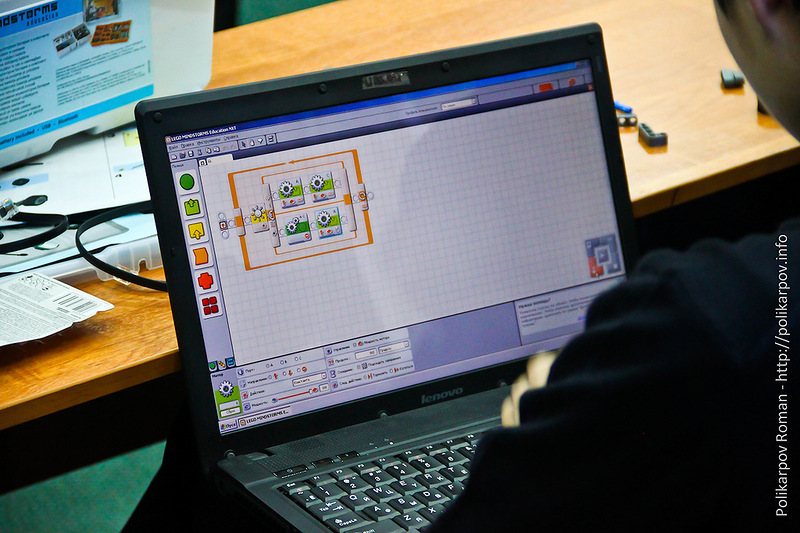
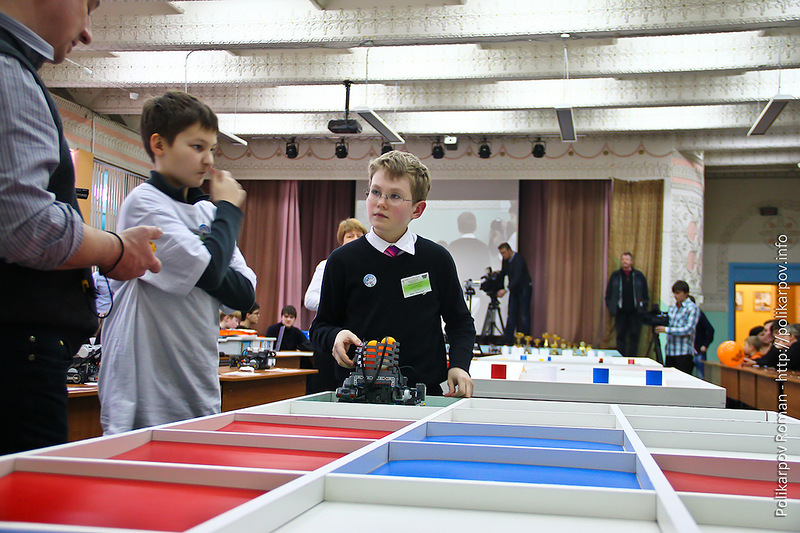
ロボットの動作がプログラムされているため、ここにはラップトップが必要です。 競争の枠組みの中で、それは無線操縦玩具ではなく、それ自体が固有の行動アルゴリズムに従って動作する自律的な機械です。 実際、何がすべての関心事です。 すべてが10歳から始まる子どもたちによって行われていることを思い出してください!
規則によると、競技の開始時にすべてを分解する必要があります。 独自の設計のロボットを組み立て、そのための動作プログラムを作成するのに約3時間かかります。
その後、すべての不具合を特定し、タスクを完了するように強制するために、無料モードでテストすることができます。



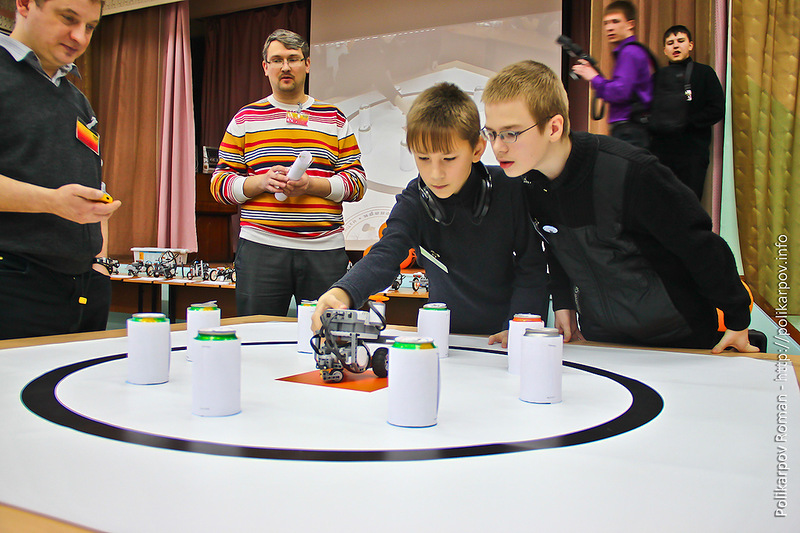
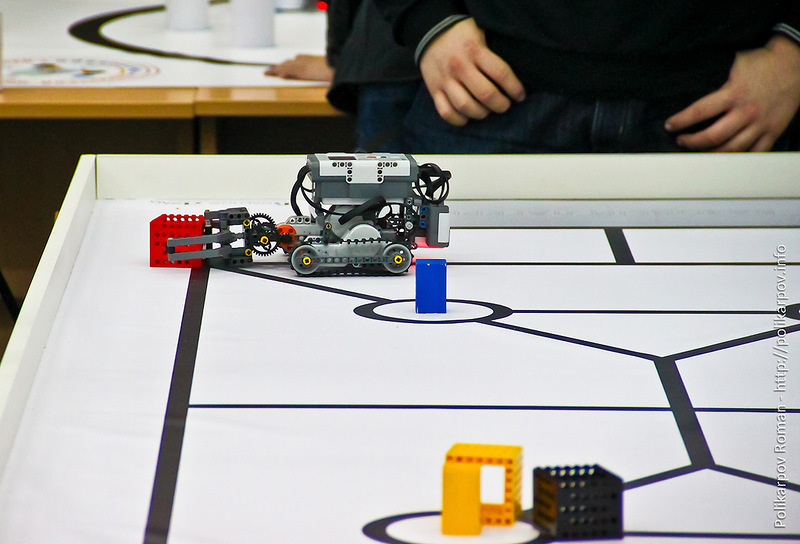
最も大規模なタスクは、最も単純で、「ケゲリング」と呼ばれます。 ロボットのタスクは非常に単純です-中心から古いピンをすべて円の外に出し、できるだけ早くそれを行う必要があります。 試行中はロボットに触れたり制御したりできないことを思い出させてください。


少女たちもロボット工学が好きで、今でも地元のテレビチャンネルにインタビューを行っています。

プログラミングには、アルゴリズムがカスタムブロックの形式で表示されるシンプルなビジュアルエディターを使用できます。
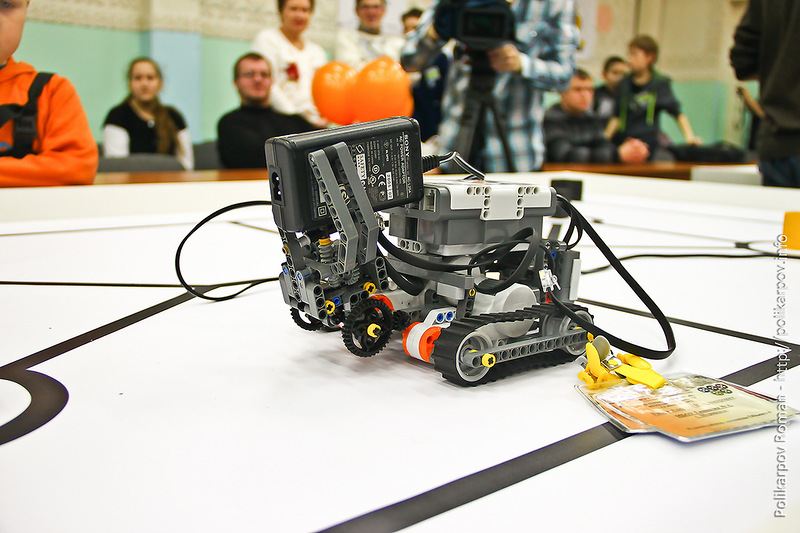
ロボットには、構成、使用部品、サイズなどの厳しい要件があります。 設計タイムアウトタイマーが鳴り、すべてのロボットが検疫に送られ、審査員によって検査されます。 各ロボットは慎重に検査され、ルールに従って20 x 20 cmのフレームに収まるように注意深くチェックされます。

これで、最初の試行が終了するまで、何も変更または調整できません。
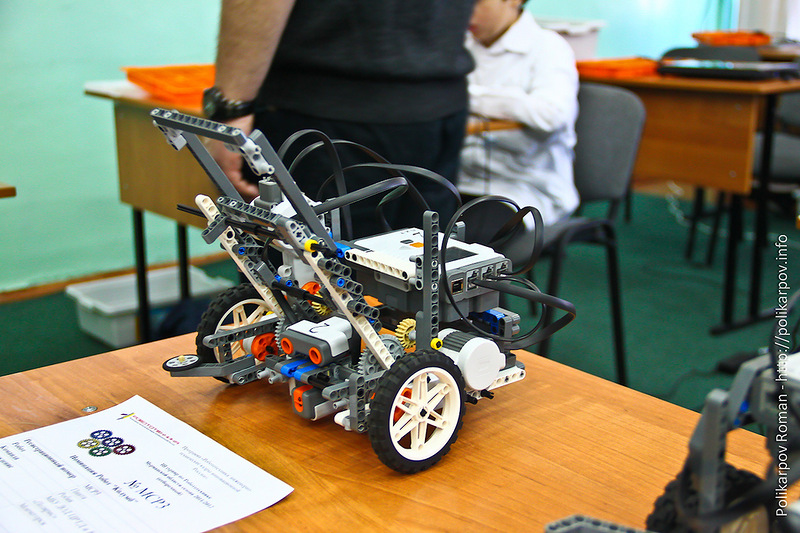
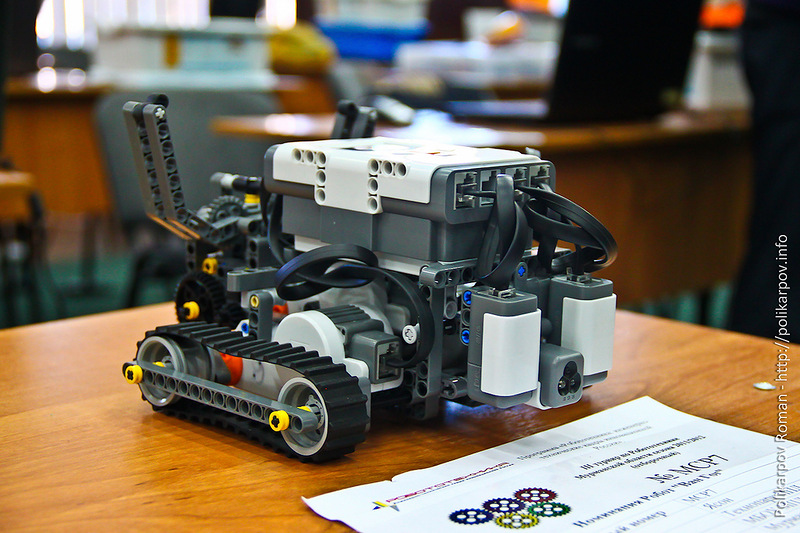
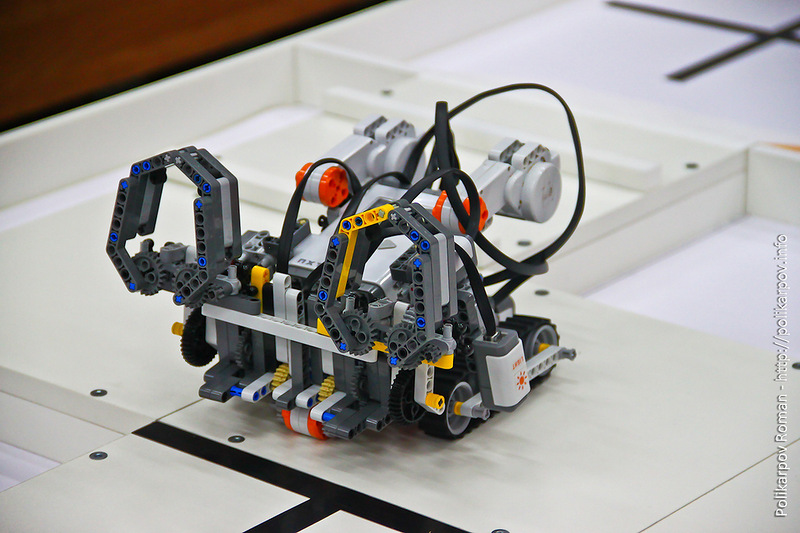
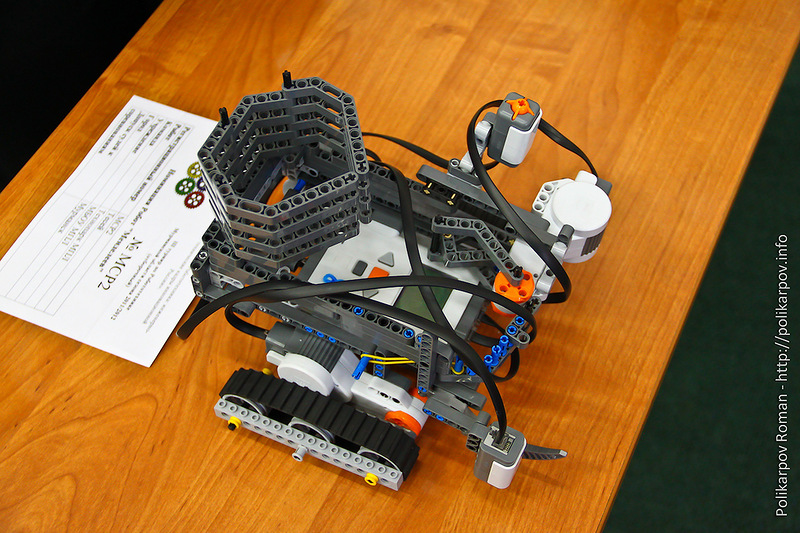
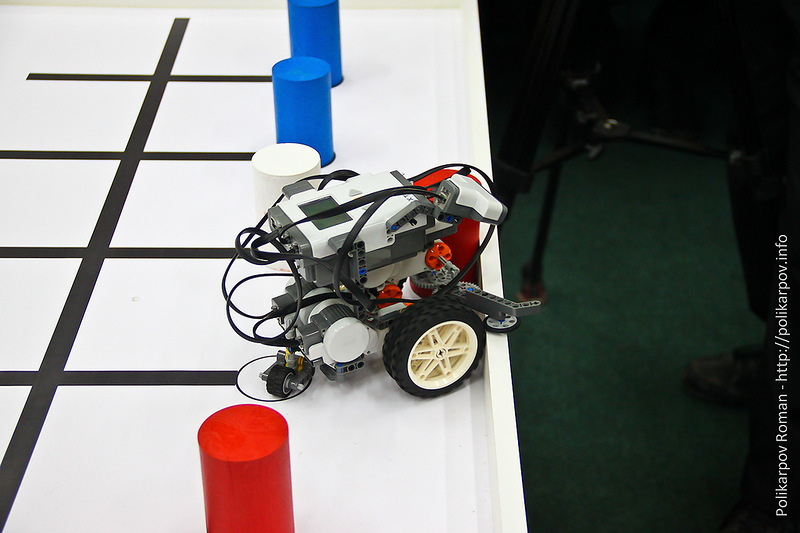
ロボットの設計は、選択した行動の戦術と相関しています。 このロボットは、ベラルーシのトラクターに似ていますが、斜めの刃を持っています。アルゴリズムに従って、円の中心から回転するらせん状に移動し、ピンを押し出すためです。

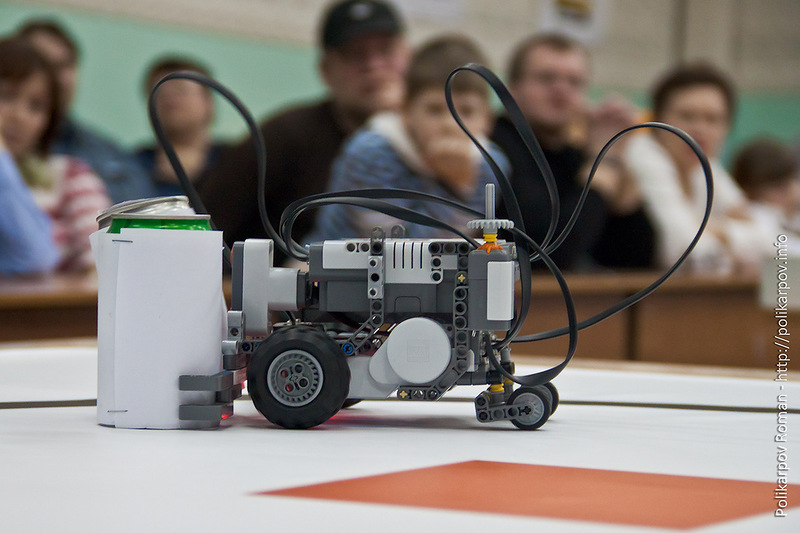
私の意見では、これは収穫機のように見えます。 大きなまっすぐな刃で、彼は缶を1つずつ押します。
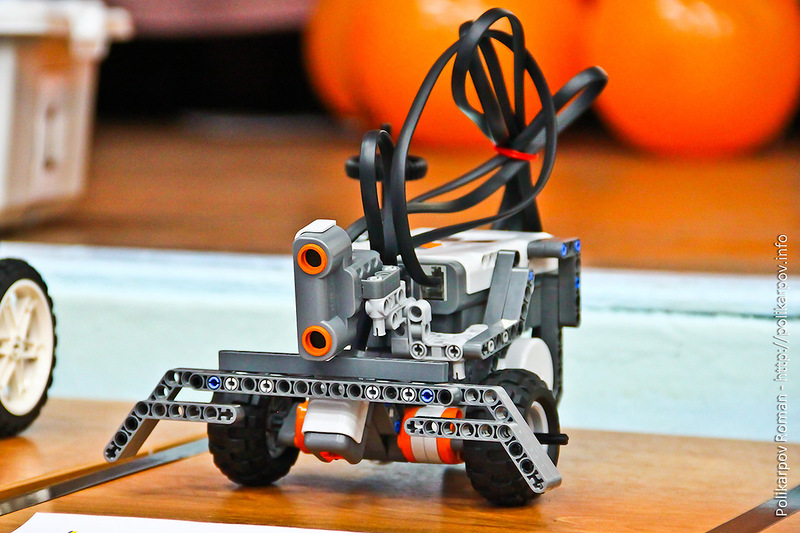
感覚器官がはっきりと見えます。 オレンジ色の「目」は超音波距離センサーです。 光センサーが下を向くと、リングの黒い境界が「キャッチ」され、ロボットが停止します。 これが起こらない場合、ロボットは自殺としてテーブルから落ちます。
リングの準備ができました。 最初の試みが始まりました! 最速が勝つため、裁判官は時間をマークします。


最初の試みはさまざまな成功を収めました-すべてのピンを押すのは1つのロボットだけでした。 Kegelringロボットは、改善と2回目の試みを見越して隔離場所に戻され、次のテーブルで、ロボットはより深刻なタスクを実行し、国際ルールに従って審判が行われます。
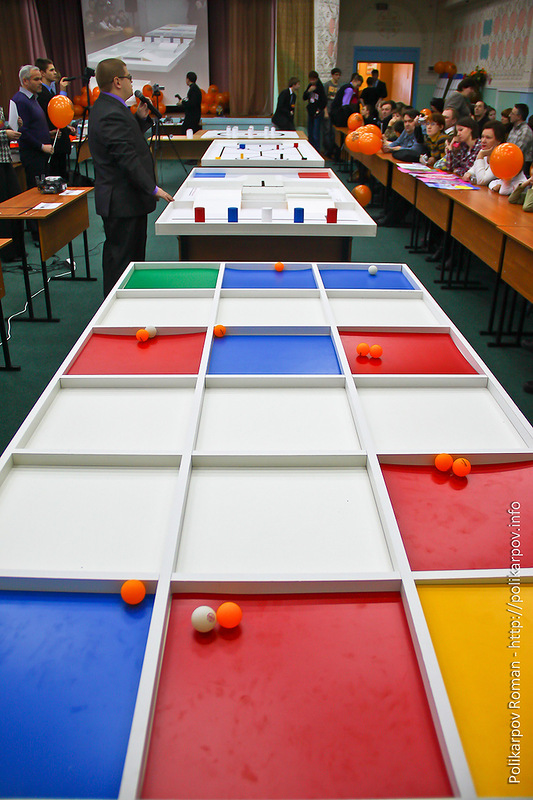
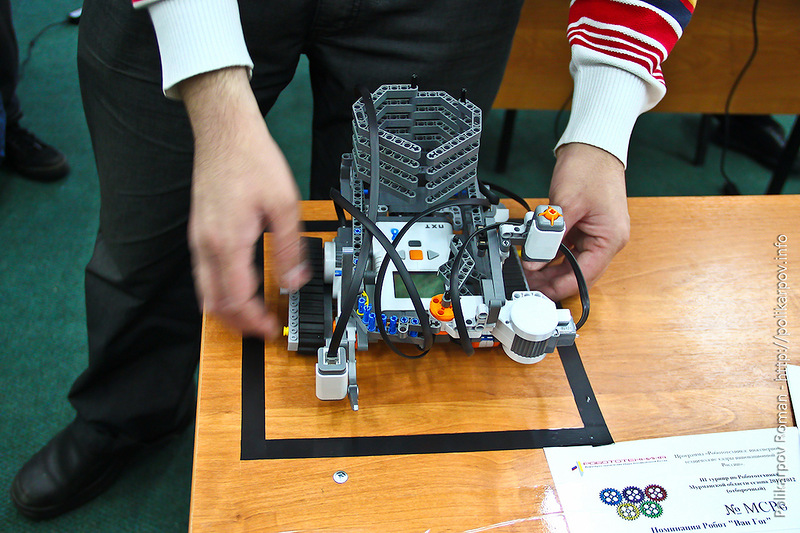
タスク「Van Gogh」。 ロボットは、2分間で4つの色付きの立方体を取り、対応する色の4つのポールに置く必要があります。 キューブはランダムに配置され、ロボットは各キューブの色を決定し、対応するポールに運ぶ必要があります。

ミッション「メンデレーエフ」。 ロボットはスタートから出て、橋を渡り(+20ポイント)、丘を乗り越え(+20ポイント)、赤または青のシリンダー(白いシリンダーは使えません-罰金)をそれぞれ青と赤のボックスに持っていく必要があります。 したがって、ランダムに配置された4つのシリンダーすべてを2分で転送する必要があります。

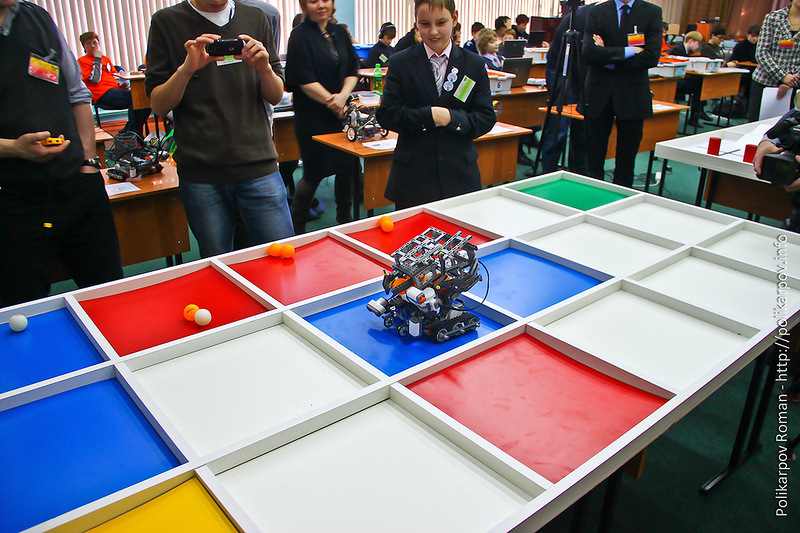
若年層の3番目のタスク。 青と赤のセルは、フィールド上にランダムに配置されています。 ロボットは、フィールドを横切って移動し、白のボールではなく、青のフィールドに1つのボール、赤のフィールドに2つのボールを投げる必要があります。 そして、2分でフィニッシュに到達します。
最近の改善と戦い。 より正確には、「検疫」で、技術規制への準拠を確認します。


その後、ロボットが実行を開始します。 ロボットは色の付いた立方体を載せようとしますが、少し落ちることはありません。
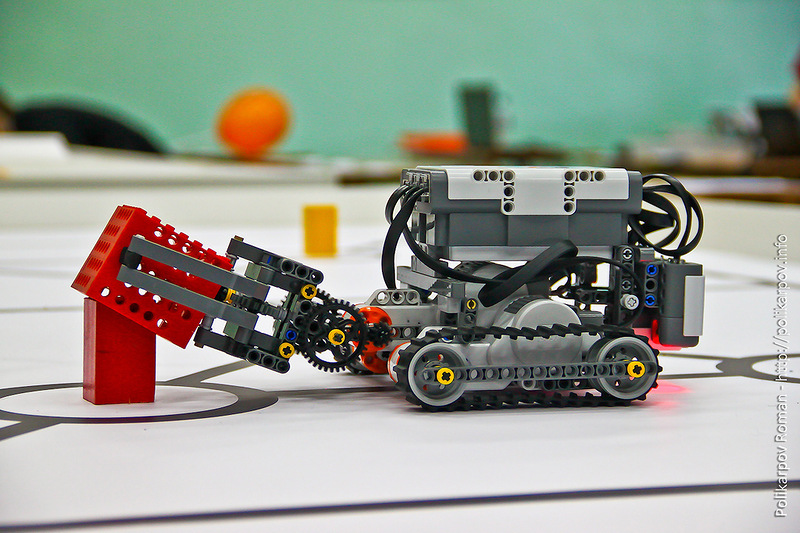
シリンダーの狩猟もあまり成功していません-ロボットは橋から落ちます、そして、彼らがシリンダーに着くならば、彼らは花で「愚か」であるか、またはそれを機械的に正常につかむことができません。
ロボットは最初に行き、色の付いたフィールドにボールを正しく分散させる必要があります。
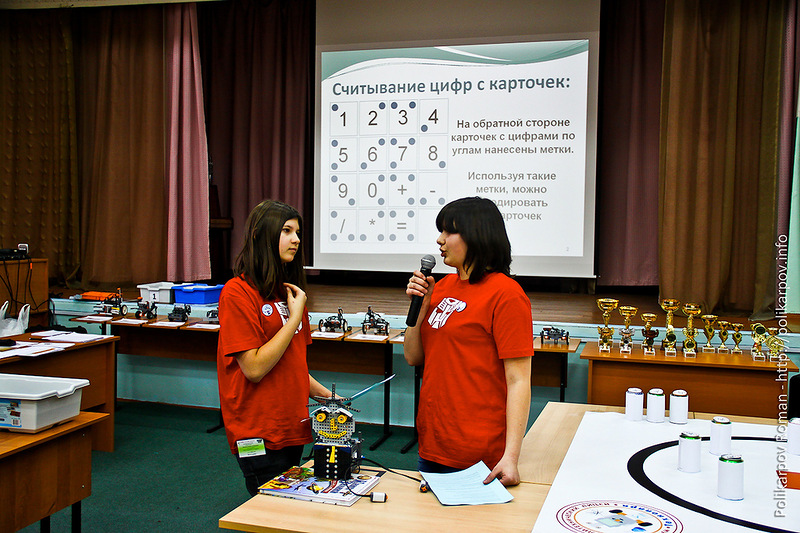
試行の合間に、2人の女の子が、カード上の数字の認識方法を知っているロボット学生を提示し、例を解き、大声で答え、結果に応じて「顔」に感情を表現します。
これに続いて、学校の食堂で休憩と昼食をとります。 帰国後、主催者は2回目の試行の前にロボットをファイナライズするためのカウントダウンを行います。 時間は金の重さの価値があるため、15秒後に検疫は空になります。
これらのユーザーは、ビジュアルエディターではなく、Bricx開発環境を使用しています。 この言語の構文はC言語に似ているため、すべて大人になっています。
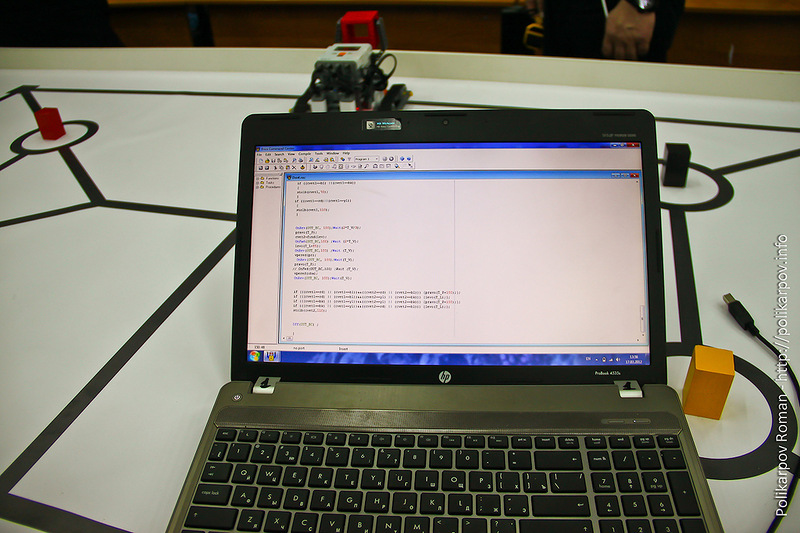
彼らはそれがより便利だと言います-それはより速く、より簡単にパラメータを変更します。

そして、ここに彼らの所有者を待っている賞品があります。

何かを修正する最近の機会。

再び検疫、技術規制の検証、抽選-すべて正直に。 そして今、ロボットは遠くに戻っています。
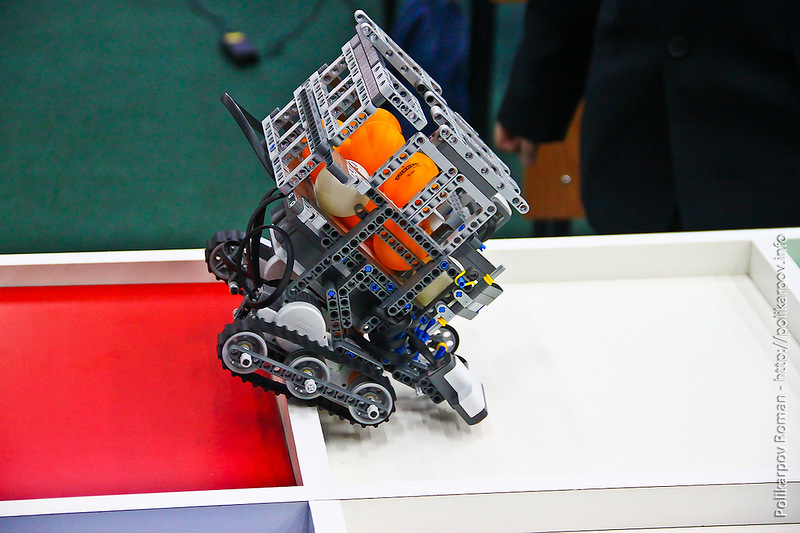
Kegelringでは、情熱が顔に書かれているだけなので、競争ははるかに困難です。


電圧が最大値に達するため、1つの銀行でさえも円線上のエッジ(!!!)にぶら下がり、困難な司法状況を作り出します。 フィールドの内部空間には関係ないため、相殺されたと見なされます。

2回目の試行は終了しました! ジャッジはポイントをカウントするために削除されます。

さて、授賞式があります。 スマートで面白い子供たちの顔を見るのはとてもいいことです。



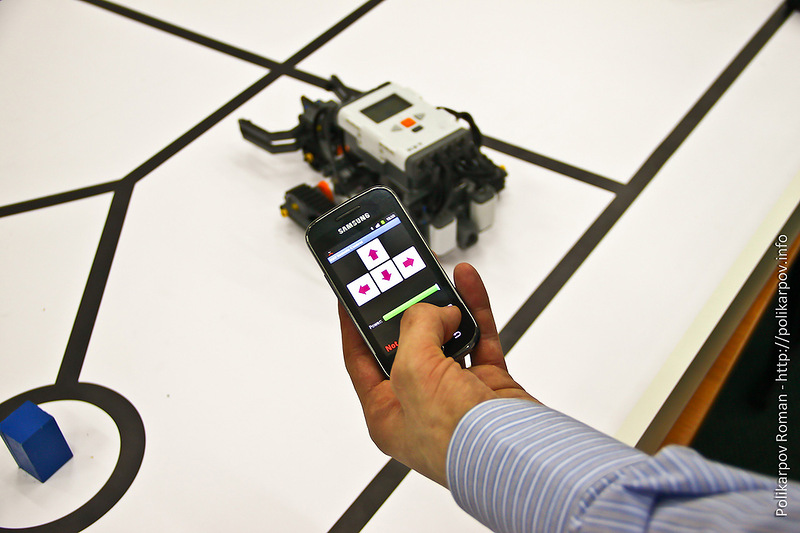
競技会の外では、Bluetooth経由でスマートフォンのアプリケーションを使用してロボットを制御する方法を示しました。 また、ロボットは相互に情報を交換できます。
一般に、イベントは非常に波乱に富み、興味深いことが判明しました。 子どもたちがそのような正しいことに熱心に取り組んでいるのは非常に前向きで楽しく、楽しいです。 そして、これが首都だけでなく、地方のムルマンスクにもあることを二重に喜んでいます。
イベントのMPLと招待状、そしてHabralyudamの注目に感謝します!
更新:まだビデオはありませんが、ロボットが見える地元のテレビ会社の話があります。
タイムズ: Youtubeで
2: Youtubeで
update2:ビデオリンク: http : //www.youtube.com/watch? v=N1r1F-hBffU