パート3
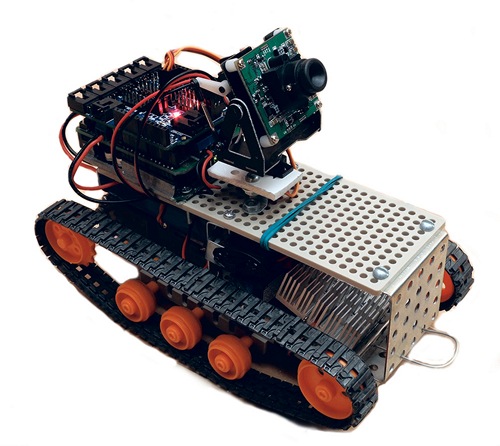
クローラーロボットの構築を続けています。
最初の部分では、必要な詳細をすべて選択し、注文しました。 ところで、最近、タミヤのすべてのパーツ(トラック、プラットフォーム、ギアボックス)がTerraelectronicaで利用できることを確認しました。 もちろん、中国よりも高価ですが、近くにあります。
すでに部品を受け取っている人は、すでにシャーシを組み立てている必要があります。
これから、車載電子機器、ビデオサブシステム、および食品に取り組みます。
Bluetooth
モーターはすでにMotorShieldに接続されています。 PCとの接続を確立するときが来ました。
これを行うには、Bluetoothモジュールを取り、そのピンTとRをピン0(Rx)と1(Tx)Arduinoに接続します。 +と-はそれぞれピン+5とGNDに接続します。 電源の極性を逆にしないでください-モジュールが焼損する可能性があります。
Arduinoに電源が供給されると、モジュールはLEDを点滅させる必要があります。接続の準備ができています。
PCにアクセスし、「linvor」という名前のBluetoothデバイスを探します-これはデフォルトでモジュールの名前です。 将来的には、作業速度と同様に、ATコマンドを使用して変更できます。 (特に、9600ではなく115200に設定し、「BT1」という名前を付けました)。 コード「1234」を使用して、PCとモジュールをペアリングします。 2つのCOMポートがシステムに表示されます。1つは発信接続用、もう1つは着信接続用です。 最初のものに興味があります。
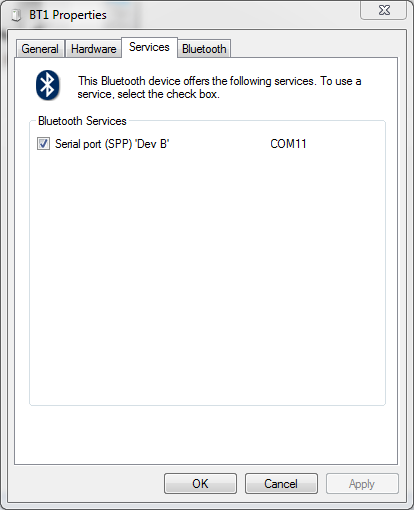
COMポート番号を書き留めてください。後で接続する際に役立ちます。 デバイスのプロパティに2つのポートがあり、どちらが発信中であるかを判断できない場合は、両方を書き留め、後で入力して判断します。
ビデオサブシステム
最初にこのキットを注文しました:

しかし、太いレースを取り除こうとしたとき、カメラを焼きました。 注意が必要な場合、必要なのはネジでロボットにカメラを固定し、12Vを印加することだけです(中国の主張に反して、9Vからは動作しません)。 送信部の準備ができました。
受信側には2つの方法があります-小さな4-7インチのテレビ(最近自分で購入しました)を購入するか、PC /ラップトップに接続します。
2番目のオプションでは、EasyCAPをPCに接続し、ドライバーをインストールし、ビデオキャプチャデバイスから画像を表示できるプログラムをインストールする必要があります。 私はDScalerを使用しています 。
使いやすくするために、レシーバーとEasyCAPをカメラ付きレシーバーキットからボックスに統合しました。 そこで、バッテリーを入れて受信機に電力を供給することができます。 これを行うには、アンテナコネクタ、受信機調整ノブ、およびEasyCAP USBコネクタ用の背面壁に穴を切ります。
ボックス内で、レシーバーの出力をCVRSおよびオーディオ入力に接続します(カメラにマイクがある場合)。 ハンドルとアンテナを取り外した後、レシーバーとEasyCAPを穴に挿入します。 両面テープまたは通常のテープで両方のデバイスを底面に固定します。

「 1.2GHzレシーバー+ EasyCAP 」
アンテナを外側にねじ込み、キャップとハンドルを取り付けます。 完全な延長コードを使用して、EasyCAPをPCまたはラップトップに接続します。

「 1.2GHzレシーバー+ EasyCAP 」
この段階では、カメラに電源を供給し、レシーバーをオンにして、DScalerでEasyCAP(デバイスはUSB VideoGrabberとして表示)に接続してから、レシーバーのチューニングノブを使用してカメラからの信号をキャッチすると便利です。
すべてが正しく組み立てられていれば、おめでとうございます。ビデオパスの準備ができているので、お楽しみください。
パンとチルト
パンチルト(PanTilt)プラットフォームとサーボを注文した場合は、カメラのサスペンションを組み立てる必要があります。 すべての接続は通常の接着剤で行われますが、注意してください、サーボはしっかりと固執します! したがって、すべてを2回チェックする価値があります。
回転(パン)サーボに向かって、コネクタを下にしてカメラを設置します。
カメラを設置する前に、ロータリーサーボドライブの中央位置を見つけ、カメラが前方を向くようにロッキングチェアをこの位置に置き、所定の位置にねじ込みます。
回転式サーボモーターには、構造全体をプラットフォームに取り付けるのが少し便利なブラケットを白いアクリルから切り取りました。 長いM3ネジを使用するか、または私のようなU字型のディテールを使用して直接可能です。
サーボドライブは、完全なネジでブラケット自体に取り付けられています。 コンストラクターでは、M4ネジを使用しているため、ボードに小さな穴を開ける必要がありました。
サーボを次のように接続します。茶色と赤のワイヤー-それぞれ+5とGnd、オレンジ-制御信号。 サーボ回転の信号線はピンD10 Arduino、サーボカメラの傾斜の信号線-ピンD9に接続されています。 センサーシールドには、各Arduinoデジタルピン用の便利な3ピンGND、VCC、Dxコネクタがあります。 この場合専用に作られています-サーボプラグは追加の配線なしで直接接続されています。
カメラを焼いて、その品質があまり高くないので、Sony 1/3 "CCDモジュールを購入しました

幸いなことに、殺されたカメラの送信機は生き残り、私はそれをソニーのカメラに直接はんだ付けし、燃え尽きた安価なカメラから静かに落としました。
1つのプラグにはんだ付けし、熱収縮するように締めることで、カメラとトランスミッターの電源を組み合わせました。
トランスミッターには黄色のワイヤがあります-ビデオ入力、ホワイト-オーディオ入力、通常どおり赤と黒-+電源とグランドですが、コードに組み込まれたコンバーターから電力が供給されるため、はんだ付けするときにトランスミッターに送られたワイヤを覚えておく必要があります。 私はこのようになった:

「 Sony CCDカメラと1.2GHzトランスミッター 」
送信機は動作中に熱くなりますが、これはその設計の特徴であり、中国人がそこに力を注ぎ込んでいるようです。
栄養
モーターとArduinoを1つのソースから提供するため、MotorShieldのExt / ArdスイッチをArdに設定します。 7-12Vの電圧は、標準のArduino電源コネクタまたはMotorShieldの端子台から供給できます。
カメラとトランスミッターに電力を供給するために、独立した12Vバッテリー

残念ながら、HKの説明に誤りがあります。2Sからは機能しません。とにかく入力に12v(3S)以上が必要です。
1階にバッテリーを取り付けます。 フロントフロアでは、2階が垂れ下がらないように、デザイナーから金属製ブラケットを固定できます。
おっと、ハードウェアの準備ができました。 マイクロコントローラ用のファームウェアとPC用のプログラムを書くことは残っています。
PS質問は-新年の休暇中にこれを行う予定があるか、1月中旬まで最後の記事を書くことを延期する予定はありますか?