問題文:
静的ビデオカメラの利点は、保護された空間の特定の立体角を継続的に監視できることです。PTZカメラの利点は、オペレーターが遠隔で変更できる空間の立体角を制御できることです。
PTZカメラの価格は、静的なものよりもはるかに高くなっています。 私たちの仕事は、手頃な価格で独自のPTZカメラを作ることです。

仕事の目的:
高精度の機構を使用せずにステッピングモーターに基づいてビデオカメラの角運動のプロセスを制御するためのアルゴリズムとソフトウェアおよびハードウェアの開発、およびパーソナルコンピューターに基づいたこの制御システムの技術的な実装。この目標は、次の主要なタスクを解決することで達成されます。
1.ステッピングモーターの既存の設計機能とその制御方法の分析。2.ステッピングモーターを使用してカメラの角運動(回転)のプロセスを制御するためのアルゴリズムとソフトウェアおよびハードウェアの開発。
3.パーソナルコンピューター(PC)に基づくステッピングモーター制御システムの技術的な実装。
仕事の科学的および実用的な意義:
ステッピングモーターを使用してカメラの回転を制御するために開発されたアルゴリズムとソフトウェアおよびハードウェアは、移動するための高精度の機構を持たない安価なWebカメラの使用に基づいて、ビデオ監視システムの視野角を大幅に拡大します。ステッピングモーターの設計機能:
ステッピングモーターは、フィードバック信号なしで所定の位置にローターを固定して、制御信号をローターの角運動(または直線運動)に変換する電気機械装置です。 特定のシステムを設計するときは、サーボモーターとステッピングモーターのどちらかを選択する必要があります。 正確な位置決めと正確な速度制御が必要であり、必要なモーメントと速度が許容限度を超えない場合、ステッピングモーターが最も経済的なソリューションです。 電気機械的運動量が速度の増加とともに増加するコレクターモーターとは異なり、ステッピングモーターは低速でより大きなモーメントを持ち、最高速度ははるかに低くなります。最も一般的なのは、巻線を備えた固定子と永久磁石を備えた回転子で構成される永久磁石モーターです。 交互の回転子極は直線形状をしており、モーターの軸に平行です。
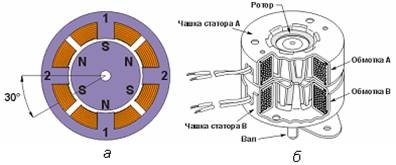
ステッピングモーターを制御する方法:
バイポーラモーターには、各相に1つの巻線があり、磁場の方向を変更するには、ドライバーで逆にする必要があります。 このタイプのモーターには、ブリッジドライバー、またはバイポーラ電源を備えたハーフブリッジが必要です。 バイポーラモーターには合計で2つの巻線があり、それに応じて4つの端子があります。ユニポーラモーターにも各相に1つの巻線がありますが、タップは巻線の中央から作成されます。 これにより、巻線の半分を切り替えるだけで、巻線によって生成される磁場の方向を変更できます。 これにより、ドライバー回路が大幅に簡素化され、4つの単純なキーのみが必要になります。 巻線の中央のリード線はモーター内で組み合わせることができるため、このモーターは5つまたは6つのリード線を持つことができます。 ユニポーラモーターには4つの独立した巻線があるため、8つの結論が出ますが、巻線を適切に接続することで、このようなエンジンをユニポーラまたはバイポーラとして使用できます。
ステッピングモーターを制御する最も効果的な方法は、ハーフステップモードです。 エンジンがハーフステップを踏むときのハーフステップモード。 2番目の各ステップでは、1つのフェーズのみが通電され、残りのケースでは2つのフェーズが通電されます。 その結果、ローターの角運動はメインステップの角度の半分になりますが、ハーフステップモードでは通常、完全なモーメントを得ることができません。

PCを使用したステッピングモーター制御のハードウェア実装:
分析に基づいて、SHD-1EMステッピングモーターが選択されました。これには、1回転あたりのステップ数が200、最大巻線電流が500 mA、定格電力が12 Wです。ULN2003Aチップをエンジンドライバーとして使用することをお勧めします。 これは、負荷回路にオープンコレクタと保護ダイオードを備えたダーリントン回路に従って組み立てられたトランジスタのセットです。 マイクロ回路には、最大500mAの負荷電流を持つ7つのスイッチングチャネルが含まれています。
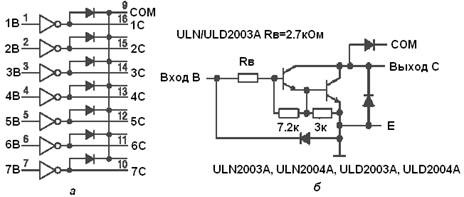
超小型回路のベース回路には抵抗があり、その入力を従来のデジタル超小型回路に直接接続できます。 すべてのエミッターは一緒に接続され、個別の出力に出力されます。 トランジスタスイッチの出力には保護ダイオードがあり、最小限の外部部品でこのマイクロチップを使用して誘導負荷を制御できます。

COM信号(ピン9)は、直接ではなく、ツェナーダイオードを介して電源に接続されます。 これは、回路の供給電圧がオフになったときにコイルに発生する自己誘導EMFの電圧から回路を保護するために行われます。 ドライバのマイクロ回路は、ECP / EPPモードのパーソナルコンピューターのパラレルLPTポートを使用して、データライン(D0〜D3)の下位4ピンで制御されます。
ステッピングモーター制御アルゴリズムの機能:
エンジンのハーフステップ制御では、図に従って、PCポートの端子D0、D1、D2、D3 LPTの電圧+ 5Vを設定する必要があります。これは、エンジンの回転方向を決定する特定のシーケンスで論理ユニットを供給することに対応します。
信号は一定の時間間隔で与えられ、プログラムフロー停止機能(SLEEP)を使用してプログラムで設定され、回転コマンドを処理する必要がある時間に依存します。
ソフトウェアの実装:
Delphi環境は、単純な構文を持ち、手続き型プログラミングとOOPのパラダイムをうまく示し、標準ライブラリのシンプルで理解しやすいアーキテクチャを備えているため、プログラミング言語として使用されます。Microsoft Windowsオペレーティングシステムを実行しているLPT通信ポートを操作するには、2つのWinAPI関数-Inp32およびOut32が使用されます。これらは標準のinpout32.dllライブラリの一部です。
シャフトStの初期位置から開始する時間TでのAlphaモーターの直接角変位を提供するサブルーチンのリストを以下に示します。
procedure Forward(Alpha:Real, T:Real, K:Real, var St:Integer);
const PORT=888;
const Steps:array[1..8] of Byte = (1, 3, 2, 6, 4, 12, 8, 9);
var I, DT:Integer;
begin
DT:=Round(T/(Alpha*K));
I:=0;
while (I<Trunc(Alpha*K)) do begin
Out32(PORT, Steps[St]); sleep(DT);
St:=St+1;
If (St>8) then St:=8;
I:=I+1;
end;
end;
結論:
完了した開発に基づいて、次の特性を持つLogitech QuickCamウェブカメラの角運動を制御するためのパーソナルコンピューターに基づくSHD-1EMステッピングモーター制御システムの技術的な実装が実行されました。参照:
1. Damjanowski V. CCTVバイブルCCTV。 デジタルおよびネットワーク技術。「IS-ES-Press、2006。-480s。
2. Dubrovsky I.L.、Dambrauskas A.P.、Rybin A.A. 産業用ロボットの電気駆動装置のマイクロプロセッサ制御:トレーニングマニュアル/; -1993年-KSTU、クラスノヤルスク-88年代。
3.高雄健男。 ステッピングモーターとそのマイクロプロセッサ制御システム:Trans。 英語から、M .: Energoatomizdat、1987-199s。
4. Lebedev N.I.、Gandshu V.M.、Yavdoshak Y.I. バルブ電気機械。 サンクトペテルブルク:ナウカ、1996年-352ページ
5.ステッピングモーター。 ギアモーター:ポータル[電子リソース]。 -アクセスモード: stepmotor.ru
PSこのプロジェクトは、2008年12月に学校のコンテストの一環として実施され、説明されました。 記事がサンドボックスで初めて公開されたとき。 その後、コピーがネットワーク上に現れ始めました。 2回目に公開されました 。