エントリー
私は物理学のすべての概念にまだ精通していないとすぐに言わなければなりませんが、私はそれらが何であるかを理解しているので、賢い言葉を期待しないでください、私は事前にすみません、最も理解しやすい人間の言語ですべてを説明しようとします
この記事を書くきっかけは、機能するアナログが不足していることです。 これを行う必要がある瞬間、私は1つだけ多かれ少なかれ通常の例をグーグルで検索しました。
- ドリフト/スリップの合計不足
- X軸とY軸に沿って移動するときの速度が異なります(原因は不明ですが、これは必要ありません)
準備する
それで、私たちは何を知っていますか。 しかし、私たちは車で(そして私たちの場合は車輪で)運転するとき、いくつかの力が働くことを知っています。 単純なプロジェクトの場合、当然、これらの力のいくつかは無視することができます(本格的なシミュレーターを実行していません)。
使用するすべてのパラメーター:
- 牽引力(ここでは速度と加速度になります)
- ホイールの縦摩擦
- ホイール摩擦
これらすべての力は、車輪のオブジェクトに直接適用されます。
グラフィカルに前進する場合、これらの力は次のように表すことができます(写真の車の前部を上にしてください)。
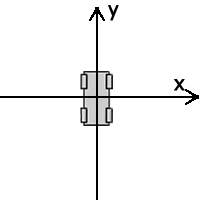
X軸-ホイールの横摩擦
Y軸ダウン-ホイールの縦摩擦
Y軸アップ-速度と加速度
上記のすべての軸は、常に各ホイールの中心とその回転角度に対して相対的です。
コードを書く
物理エンジンとして、Box2Dを選択しました。 コードを記述しやすくするために、Box2Dでプリミティブを作成するのがはるかに簡単になるため、 QuickBox2Dラッパーを使用することにしました。
必要なクラスを接続します :
import Box2D. Collision . Shapes . * ; import Box2D. Common . Math . * ; import Box2D. Dynamics . * ; import Box2D. Dynamics . Joints . * ; import Box2D. Collision . * ; import Box2D. Common . * ; import com. actionsnippet . qbox . * ;
import Box2D. Collision . Shapes . * ; import Box2D. Common . Math . * ; import Box2D. Dynamics . * ; import Box2D. Dynamics . Joints . * ; import Box2D. Collision . * ; import Box2D. Common . * ; import com. actionsnippet . qbox . * ;
import Box2D. Collision . Shapes . * ; import Box2D. Common . Math . * ; import Box2D. Dynamics . * ; import Box2D. Dynamics . Joints . * ; import Box2D. Collision . * ; import Box2D. Common . * ; import com. actionsnippet . qbox . * ;
import Box2D. Collision . Shapes . * ; import Box2D. Common . Math . * ; import Box2D. Dynamics . * ; import Box2D. Dynamics . Joints . * ; import Box2D. Collision . * ; import Box2D. Common . * ; import com. actionsnippet . qbox . * ;
import Box2D. Collision . Shapes . * ; import Box2D. Common . Math . * ; import Box2D. Dynamics . * ; import Box2D. Dynamics . Joints . * ; import Box2D. Collision . * ; import Box2D. Common . * ; import com. actionsnippet . qbox . * ;
import Box2D. Collision . Shapes . * ; import Box2D. Common . Math . * ; import Box2D. Dynamics . * ; import Box2D. Dynamics . Joints . * ; import Box2D. Collision . * ; import Box2D. Common . * ; import com. actionsnippet . qbox . * ;
import Box2D. Collision . Shapes . * ; import Box2D. Common . Math . * ; import Box2D. Dynamics . * ; import Box2D. Dynamics . Joints . * ; import Box2D. Collision . * ; import Box2D. Common . * ; import com. actionsnippet . qbox . * ;
...そして私たちの世界を作ります:
var world:QuickBox2D = new QuickBox2D ( this , { debug: false , frim: true } ) ; world. gravity = new b2Vec2 ( 0 , 0 ) ; // world. start ( ) ; // world. createStageWalls ( ) ; // QuickBox'a - 4 stage world. mouseDrag ( ) ; //
var world:QuickBox2D = new QuickBox2D ( this , { debug: false , frim: true } ) ; world. gravity = new b2Vec2 ( 0 , 0 ) ; // world. start ( ) ; // world. createStageWalls ( ) ; // QuickBox'a - 4 stage world. mouseDrag ( ) ; //
var world:QuickBox2D = new QuickBox2D ( this , { debug: false , frim: true } ) ; world. gravity = new b2Vec2 ( 0 , 0 ) ; // world. start ( ) ; // world. createStageWalls ( ) ; // QuickBox'a - 4 stage world. mouseDrag ( ) ; //
var world:QuickBox2D = new QuickBox2D ( this , { debug: false , frim: true } ) ; world. gravity = new b2Vec2 ( 0 , 0 ) ; // world. start ( ) ; // world. createStageWalls ( ) ; // QuickBox'a - 4 stage world. mouseDrag ( ) ; //
var world:QuickBox2D = new QuickBox2D ( this , { debug: false , frim: true } ) ; world. gravity = new b2Vec2 ( 0 , 0 ) ; // world. start ( ) ; // world. createStageWalls ( ) ; // QuickBox'a - 4 stage world. mouseDrag ( ) ; //
必要な変数または定数を書きます :
// : private const FWD= 1 ; // private const AWD= 2 ; // private const RWD= 3 ; // private var _privod: Number ; // , private var _maxTurnAngle: Number ; // private var _width : Number ; // private var _height : Number ; // private var _axisOffset: Number ; // , private const _angularDamping = 7 ; // private const _angularDampingReverse = 3 ; // , private const _linearDamping = 0.25 ; // , - private const _linearDampingReverse = 0.5 ; // public var _carBody:QuickObject; // private var _frontAxisBodyLeft:QuickObject; // private var _frontAxisBodyRight:QuickObject; private var _rearAxisBodyLeft:QuickObject; private var _rearAxisBodyRight:QuickObject; private var _frontLeftJoint:QuickObject; // private var _frontRightJoint:QuickObject; private var _rearLeftJoint:QuickObject; // private var _rearRightJoint:QuickObject; protected var axisHeight: Number = 4 ; // protected var axisWidth: Number = 7 ; // public var drive: int = 0 ; // public var steer: int = 0 ; //drive = 1 - //drive = 0 - , //drive = -1 - // //steer = -1 - //steer = 0 - //steer = 1 -
// : private const FWD= 1 ; // private const AWD= 2 ; // private const RWD= 3 ; // private var _privod: Number ; // , private var _maxTurnAngle: Number ; // private var _width : Number ; // private var _height : Number ; // private var _axisOffset: Number ; // , private const _angularDamping = 7 ; // private const _angularDampingReverse = 3 ; // , private const _linearDamping = 0.25 ; // , - private const _linearDampingReverse = 0.5 ; // public var _carBody:QuickObject; // private var _frontAxisBodyLeft:QuickObject; // private var _frontAxisBodyRight:QuickObject; private var _rearAxisBodyLeft:QuickObject; private var _rearAxisBodyRight:QuickObject; private var _frontLeftJoint:QuickObject; // private var _frontRightJoint:QuickObject; private var _rearLeftJoint:QuickObject; // private var _rearRightJoint:QuickObject; protected var axisHeight: Number = 4 ; // protected var axisWidth: Number = 7 ; // public var drive: int = 0 ; // public var steer: int = 0 ; //drive = 1 - //drive = 0 - , //drive = -1 - // //steer = -1 - //steer = 0 - //steer = 1 -
// : private const FWD= 1 ; // private const AWD= 2 ; // private const RWD= 3 ; // private var _privod: Number ; // , private var _maxTurnAngle: Number ; // private var _width : Number ; // private var _height : Number ; // private var _axisOffset: Number ; // , private const _angularDamping = 7 ; // private const _angularDampingReverse = 3 ; // , private const _linearDamping = 0.25 ; // , - private const _linearDampingReverse = 0.5 ; // public var _carBody:QuickObject; // private var _frontAxisBodyLeft:QuickObject; // private var _frontAxisBodyRight:QuickObject; private var _rearAxisBodyLeft:QuickObject; private var _rearAxisBodyRight:QuickObject; private var _frontLeftJoint:QuickObject; // private var _frontRightJoint:QuickObject; private var _rearLeftJoint:QuickObject; // private var _rearRightJoint:QuickObject; protected var axisHeight: Number = 4 ; // protected var axisWidth: Number = 7 ; // public var drive: int = 0 ; // public var steer: int = 0 ; //drive = 1 - //drive = 0 - , //drive = -1 - // //steer = -1 - //steer = 0 - //steer = 1 -
// : private const FWD= 1 ; // private const AWD= 2 ; // private const RWD= 3 ; // private var _privod: Number ; // , private var _maxTurnAngle: Number ; // private var _width : Number ; // private var _height : Number ; // private var _axisOffset: Number ; // , private const _angularDamping = 7 ; // private const _angularDampingReverse = 3 ; // , private const _linearDamping = 0.25 ; // , - private const _linearDampingReverse = 0.5 ; // public var _carBody:QuickObject; // private var _frontAxisBodyLeft:QuickObject; // private var _frontAxisBodyRight:QuickObject; private var _rearAxisBodyLeft:QuickObject; private var _rearAxisBodyRight:QuickObject; private var _frontLeftJoint:QuickObject; // private var _frontRightJoint:QuickObject; private var _rearLeftJoint:QuickObject; // private var _rearRightJoint:QuickObject; protected var axisHeight: Number = 4 ; // protected var axisWidth: Number = 7 ; // public var drive: int = 0 ; // public var steer: int = 0 ; //drive = 1 - //drive = 0 - , //drive = -1 - // //steer = -1 - //steer = 0 - //steer = 1 -
// : private const FWD= 1 ; // private const AWD= 2 ; // private const RWD= 3 ; // private var _privod: Number ; // , private var _maxTurnAngle: Number ; // private var _width : Number ; // private var _height : Number ; // private var _axisOffset: Number ; // , private const _angularDamping = 7 ; // private const _angularDampingReverse = 3 ; // , private const _linearDamping = 0.25 ; // , - private const _linearDampingReverse = 0.5 ; // public var _carBody:QuickObject; // private var _frontAxisBodyLeft:QuickObject; // private var _frontAxisBodyRight:QuickObject; private var _rearAxisBodyLeft:QuickObject; private var _rearAxisBodyRight:QuickObject; private var _frontLeftJoint:QuickObject; // private var _frontRightJoint:QuickObject; private var _rearLeftJoint:QuickObject; // private var _rearRightJoint:QuickObject; protected var axisHeight: Number = 4 ; // protected var axisWidth: Number = 7 ; // public var drive: int = 0 ; // public var steer: int = 0 ; //drive = 1 - //drive = 0 - , //drive = -1 - // //steer = -1 - //steer = 0 - //steer = 1 -
// : private const FWD= 1 ; // private const AWD= 2 ; // private const RWD= 3 ; // private var _privod: Number ; // , private var _maxTurnAngle: Number ; // private var _width : Number ; // private var _height : Number ; // private var _axisOffset: Number ; // , private const _angularDamping = 7 ; // private const _angularDampingReverse = 3 ; // , private const _linearDamping = 0.25 ; // , - private const _linearDampingReverse = 0.5 ; // public var _carBody:QuickObject; // private var _frontAxisBodyLeft:QuickObject; // private var _frontAxisBodyRight:QuickObject; private var _rearAxisBodyLeft:QuickObject; private var _rearAxisBodyRight:QuickObject; private var _frontLeftJoint:QuickObject; // private var _frontRightJoint:QuickObject; private var _rearLeftJoint:QuickObject; // private var _rearRightJoint:QuickObject; protected var axisHeight: Number = 4 ; // protected var axisWidth: Number = 7 ; // public var drive: int = 0 ; // public var steer: int = 0 ; //drive = 1 - //drive = 0 - , //drive = -1 - // //steer = -1 - //steer = 0 - //steer = 1 -
// : private const FWD= 1 ; // private const AWD= 2 ; // private const RWD= 3 ; // private var _privod: Number ; // , private var _maxTurnAngle: Number ; // private var _width : Number ; // private var _height : Number ; // private var _axisOffset: Number ; // , private const _angularDamping = 7 ; // private const _angularDampingReverse = 3 ; // , private const _linearDamping = 0.25 ; // , - private const _linearDampingReverse = 0.5 ; // public var _carBody:QuickObject; // private var _frontAxisBodyLeft:QuickObject; // private var _frontAxisBodyRight:QuickObject; private var _rearAxisBodyLeft:QuickObject; private var _rearAxisBodyRight:QuickObject; private var _frontLeftJoint:QuickObject; // private var _frontRightJoint:QuickObject; private var _rearLeftJoint:QuickObject; // private var _rearRightJoint:QuickObject; protected var axisHeight: Number = 4 ; // protected var axisWidth: Number = 7 ; // public var drive: int = 0 ; // public var steer: int = 0 ; //drive = 1 - //drive = 0 - , //drive = -1 - // //steer = -1 - //steer = 0 - //steer = 1 -
// : private const FWD= 1 ; // private const AWD= 2 ; // private const RWD= 3 ; // private var _privod: Number ; // , private var _maxTurnAngle: Number ; // private var _width : Number ; // private var _height : Number ; // private var _axisOffset: Number ; // , private const _angularDamping = 7 ; // private const _angularDampingReverse = 3 ; // , private const _linearDamping = 0.25 ; // , - private const _linearDampingReverse = 0.5 ; // public var _carBody:QuickObject; // private var _frontAxisBodyLeft:QuickObject; // private var _frontAxisBodyRight:QuickObject; private var _rearAxisBodyLeft:QuickObject; private var _rearAxisBodyRight:QuickObject; private var _frontLeftJoint:QuickObject; // private var _frontRightJoint:QuickObject; private var _rearLeftJoint:QuickObject; // private var _rearRightJoint:QuickObject; protected var axisHeight: Number = 4 ; // protected var axisWidth: Number = 7 ; // public var drive: int = 0 ; // public var steer: int = 0 ; //drive = 1 - //drive = 0 - , //drive = -1 - // //steer = -1 - //steer = 0 - //steer = 1 -
// : private const FWD= 1 ; // private const AWD= 2 ; // private const RWD= 3 ; // private var _privod: Number ; // , private var _maxTurnAngle: Number ; // private var _width : Number ; // private var _height : Number ; // private var _axisOffset: Number ; // , private const _angularDamping = 7 ; // private const _angularDampingReverse = 3 ; // , private const _linearDamping = 0.25 ; // , - private const _linearDampingReverse = 0.5 ; // public var _carBody:QuickObject; // private var _frontAxisBodyLeft:QuickObject; // private var _frontAxisBodyRight:QuickObject; private var _rearAxisBodyLeft:QuickObject; private var _rearAxisBodyRight:QuickObject; private var _frontLeftJoint:QuickObject; // private var _frontRightJoint:QuickObject; private var _rearLeftJoint:QuickObject; // private var _rearRightJoint:QuickObject; protected var axisHeight: Number = 4 ; // protected var axisWidth: Number = 7 ; // public var drive: int = 0 ; // public var steer: int = 0 ; //drive = 1 - //drive = 0 - , //drive = -1 - // //steer = -1 - //steer = 0 - //steer = 1 -
// : private const FWD= 1 ; // private const AWD= 2 ; // private const RWD= 3 ; // private var _privod: Number ; // , private var _maxTurnAngle: Number ; // private var _width : Number ; // private var _height : Number ; // private var _axisOffset: Number ; // , private const _angularDamping = 7 ; // private const _angularDampingReverse = 3 ; // , private const _linearDamping = 0.25 ; // , - private const _linearDampingReverse = 0.5 ; // public var _carBody:QuickObject; // private var _frontAxisBodyLeft:QuickObject; // private var _frontAxisBodyRight:QuickObject; private var _rearAxisBodyLeft:QuickObject; private var _rearAxisBodyRight:QuickObject; private var _frontLeftJoint:QuickObject; // private var _frontRightJoint:QuickObject; private var _rearLeftJoint:QuickObject; // private var _rearRightJoint:QuickObject; protected var axisHeight: Number = 4 ; // protected var axisWidth: Number = 7 ; // public var drive: int = 0 ; // public var steer: int = 0 ; //drive = 1 - //drive = 0 - , //drive = -1 - // //steer = -1 - //steer = 0 - //steer = 1 -
// : private const FWD= 1 ; // private const AWD= 2 ; // private const RWD= 3 ; // private var _privod: Number ; // , private var _maxTurnAngle: Number ; // private var _width : Number ; // private var _height : Number ; // private var _axisOffset: Number ; // , private const _angularDamping = 7 ; // private const _angularDampingReverse = 3 ; // , private const _linearDamping = 0.25 ; // , - private const _linearDampingReverse = 0.5 ; // public var _carBody:QuickObject; // private var _frontAxisBodyLeft:QuickObject; // private var _frontAxisBodyRight:QuickObject; private var _rearAxisBodyLeft:QuickObject; private var _rearAxisBodyRight:QuickObject; private var _frontLeftJoint:QuickObject; // private var _frontRightJoint:QuickObject; private var _rearLeftJoint:QuickObject; // private var _rearRightJoint:QuickObject; protected var axisHeight: Number = 4 ; // protected var axisWidth: Number = 7 ; // public var drive: int = 0 ; // public var steer: int = 0 ; //drive = 1 - //drive = 0 - , //drive = -1 - // //steer = -1 - //steer = 0 - //steer = 1 -
// : private const FWD= 1 ; // private const AWD= 2 ; // private const RWD= 3 ; // private var _privod: Number ; // , private var _maxTurnAngle: Number ; // private var _width : Number ; // private var _height : Number ; // private var _axisOffset: Number ; // , private const _angularDamping = 7 ; // private const _angularDampingReverse = 3 ; // , private const _linearDamping = 0.25 ; // , - private const _linearDampingReverse = 0.5 ; // public var _carBody:QuickObject; // private var _frontAxisBodyLeft:QuickObject; // private var _frontAxisBodyRight:QuickObject; private var _rearAxisBodyLeft:QuickObject; private var _rearAxisBodyRight:QuickObject; private var _frontLeftJoint:QuickObject; // private var _frontRightJoint:QuickObject; private var _rearLeftJoint:QuickObject; // private var _rearRightJoint:QuickObject; protected var axisHeight: Number = 4 ; // protected var axisWidth: Number = 7 ; // public var drive: int = 0 ; // public var steer: int = 0 ; //drive = 1 - //drive = 0 - , //drive = -1 - // //steer = -1 - //steer = 0 - //steer = 1 -
// : private const FWD= 1 ; // private const AWD= 2 ; // private const RWD= 3 ; // private var _privod: Number ; // , private var _maxTurnAngle: Number ; // private var _width : Number ; // private var _height : Number ; // private var _axisOffset: Number ; // , private const _angularDamping = 7 ; // private const _angularDampingReverse = 3 ; // , private const _linearDamping = 0.25 ; // , - private const _linearDampingReverse = 0.5 ; // public var _carBody:QuickObject; // private var _frontAxisBodyLeft:QuickObject; // private var _frontAxisBodyRight:QuickObject; private var _rearAxisBodyLeft:QuickObject; private var _rearAxisBodyRight:QuickObject; private var _frontLeftJoint:QuickObject; // private var _frontRightJoint:QuickObject; private var _rearLeftJoint:QuickObject; // private var _rearRightJoint:QuickObject; protected var axisHeight: Number = 4 ; // protected var axisWidth: Number = 7 ; // public var drive: int = 0 ; // public var steer: int = 0 ; //drive = 1 - //drive = 0 - , //drive = -1 - // //steer = -1 - //steer = 0 - //steer = 1 -
// : private const FWD= 1 ; // private const AWD= 2 ; // private const RWD= 3 ; // private var _privod: Number ; // , private var _maxTurnAngle: Number ; // private var _width : Number ; // private var _height : Number ; // private var _axisOffset: Number ; // , private const _angularDamping = 7 ; // private const _angularDampingReverse = 3 ; // , private const _linearDamping = 0.25 ; // , - private const _linearDampingReverse = 0.5 ; // public var _carBody:QuickObject; // private var _frontAxisBodyLeft:QuickObject; // private var _frontAxisBodyRight:QuickObject; private var _rearAxisBodyLeft:QuickObject; private var _rearAxisBodyRight:QuickObject; private var _frontLeftJoint:QuickObject; // private var _frontRightJoint:QuickObject; private var _rearLeftJoint:QuickObject; // private var _rearRightJoint:QuickObject; protected var axisHeight: Number = 4 ; // protected var axisWidth: Number = 7 ; // public var drive: int = 0 ; // public var steer: int = 0 ; //drive = 1 - //drive = 0 - , //drive = -1 - // //steer = -1 - //steer = 0 - //steer = 1 -
// : private const FWD= 1 ; // private const AWD= 2 ; // private const RWD= 3 ; // private var _privod: Number ; // , private var _maxTurnAngle: Number ; // private var _width : Number ; // private var _height : Number ; // private var _axisOffset: Number ; // , private const _angularDamping = 7 ; // private const _angularDampingReverse = 3 ; // , private const _linearDamping = 0.25 ; // , - private const _linearDampingReverse = 0.5 ; // public var _carBody:QuickObject; // private var _frontAxisBodyLeft:QuickObject; // private var _frontAxisBodyRight:QuickObject; private var _rearAxisBodyLeft:QuickObject; private var _rearAxisBodyRight:QuickObject; private var _frontLeftJoint:QuickObject; // private var _frontRightJoint:QuickObject; private var _rearLeftJoint:QuickObject; // private var _rearRightJoint:QuickObject; protected var axisHeight: Number = 4 ; // protected var axisWidth: Number = 7 ; // public var drive: int = 0 ; // public var steer: int = 0 ; //drive = 1 - //drive = 0 - , //drive = -1 - // //steer = -1 - //steer = 0 - //steer = 1 -
// : private const FWD= 1 ; // private const AWD= 2 ; // private const RWD= 3 ; // private var _privod: Number ; // , private var _maxTurnAngle: Number ; // private var _width : Number ; // private var _height : Number ; // private var _axisOffset: Number ; // , private const _angularDamping = 7 ; // private const _angularDampingReverse = 3 ; // , private const _linearDamping = 0.25 ; // , - private const _linearDampingReverse = 0.5 ; // public var _carBody:QuickObject; // private var _frontAxisBodyLeft:QuickObject; // private var _frontAxisBodyRight:QuickObject; private var _rearAxisBodyLeft:QuickObject; private var _rearAxisBodyRight:QuickObject; private var _frontLeftJoint:QuickObject; // private var _frontRightJoint:QuickObject; private var _rearLeftJoint:QuickObject; // private var _rearRightJoint:QuickObject; protected var axisHeight: Number = 4 ; // protected var axisWidth: Number = 7 ; // public var drive: int = 0 ; // public var steer: int = 0 ; //drive = 1 - //drive = 0 - , //drive = -1 - // //steer = -1 - //steer = 0 - //steer = 1 -
// : private const FWD= 1 ; // private const AWD= 2 ; // private const RWD= 3 ; // private var _privod: Number ; // , private var _maxTurnAngle: Number ; // private var _width : Number ; // private var _height : Number ; // private var _axisOffset: Number ; // , private const _angularDamping = 7 ; // private const _angularDampingReverse = 3 ; // , private const _linearDamping = 0.25 ; // , - private const _linearDampingReverse = 0.5 ; // public var _carBody:QuickObject; // private var _frontAxisBodyLeft:QuickObject; // private var _frontAxisBodyRight:QuickObject; private var _rearAxisBodyLeft:QuickObject; private var _rearAxisBodyRight:QuickObject; private var _frontLeftJoint:QuickObject; // private var _frontRightJoint:QuickObject; private var _rearLeftJoint:QuickObject; // private var _rearRightJoint:QuickObject; protected var axisHeight: Number = 4 ; // protected var axisWidth: Number = 7 ; // public var drive: int = 0 ; // public var steer: int = 0 ; //drive = 1 - //drive = 0 - , //drive = -1 - // //steer = -1 - //steer = 0 - //steer = 1 -
// : private const FWD= 1 ; // private const AWD= 2 ; // private const RWD= 3 ; // private var _privod: Number ; // , private var _maxTurnAngle: Number ; // private var _width : Number ; // private var _height : Number ; // private var _axisOffset: Number ; // , private const _angularDamping = 7 ; // private const _angularDampingReverse = 3 ; // , private const _linearDamping = 0.25 ; // , - private const _linearDampingReverse = 0.5 ; // public var _carBody:QuickObject; // private var _frontAxisBodyLeft:QuickObject; // private var _frontAxisBodyRight:QuickObject; private var _rearAxisBodyLeft:QuickObject; private var _rearAxisBodyRight:QuickObject; private var _frontLeftJoint:QuickObject; // private var _frontRightJoint:QuickObject; private var _rearLeftJoint:QuickObject; // private var _rearRightJoint:QuickObject; protected var axisHeight: Number = 4 ; // protected var axisWidth: Number = 7 ; // public var drive: int = 0 ; // public var steer: int = 0 ; //drive = 1 - //drive = 0 - , //drive = -1 - // //steer = -1 - //steer = 0 - //steer = 1 -
// : private const FWD= 1 ; // private const AWD= 2 ; // private const RWD= 3 ; // private var _privod: Number ; // , private var _maxTurnAngle: Number ; // private var _width : Number ; // private var _height : Number ; // private var _axisOffset: Number ; // , private const _angularDamping = 7 ; // private const _angularDampingReverse = 3 ; // , private const _linearDamping = 0.25 ; // , - private const _linearDampingReverse = 0.5 ; // public var _carBody:QuickObject; // private var _frontAxisBodyLeft:QuickObject; // private var _frontAxisBodyRight:QuickObject; private var _rearAxisBodyLeft:QuickObject; private var _rearAxisBodyRight:QuickObject; private var _frontLeftJoint:QuickObject; // private var _frontRightJoint:QuickObject; private var _rearLeftJoint:QuickObject; // private var _rearRightJoint:QuickObject; protected var axisHeight: Number = 4 ; // protected var axisWidth: Number = 7 ; // public var drive: int = 0 ; // public var steer: int = 0 ; //drive = 1 - //drive = 0 - , //drive = -1 - // //steer = -1 - //steer = 0 - //steer = 1 -
// : private const FWD= 1 ; // private const AWD= 2 ; // private const RWD= 3 ; // private var _privod: Number ; // , private var _maxTurnAngle: Number ; // private var _width : Number ; // private var _height : Number ; // private var _axisOffset: Number ; // , private const _angularDamping = 7 ; // private const _angularDampingReverse = 3 ; // , private const _linearDamping = 0.25 ; // , - private const _linearDampingReverse = 0.5 ; // public var _carBody:QuickObject; // private var _frontAxisBodyLeft:QuickObject; // private var _frontAxisBodyRight:QuickObject; private var _rearAxisBodyLeft:QuickObject; private var _rearAxisBodyRight:QuickObject; private var _frontLeftJoint:QuickObject; // private var _frontRightJoint:QuickObject; private var _rearLeftJoint:QuickObject; // private var _rearRightJoint:QuickObject; protected var axisHeight: Number = 4 ; // protected var axisWidth: Number = 7 ; // public var drive: int = 0 ; // public var steer: int = 0 ; //drive = 1 - //drive = 0 - , //drive = -1 - // //steer = -1 - //steer = 0 - //steer = 1 -
// : private const FWD= 1 ; // private const AWD= 2 ; // private const RWD= 3 ; // private var _privod: Number ; // , private var _maxTurnAngle: Number ; // private var _width : Number ; // private var _height : Number ; // private var _axisOffset: Number ; // , private const _angularDamping = 7 ; // private const _angularDampingReverse = 3 ; // , private const _linearDamping = 0.25 ; // , - private const _linearDampingReverse = 0.5 ; // public var _carBody:QuickObject; // private var _frontAxisBodyLeft:QuickObject; // private var _frontAxisBodyRight:QuickObject; private var _rearAxisBodyLeft:QuickObject; private var _rearAxisBodyRight:QuickObject; private var _frontLeftJoint:QuickObject; // private var _frontRightJoint:QuickObject; private var _rearLeftJoint:QuickObject; // private var _rearRightJoint:QuickObject; protected var axisHeight: Number = 4 ; // protected var axisWidth: Number = 7 ; // public var drive: int = 0 ; // public var steer: int = 0 ; //drive = 1 - //drive = 0 - , //drive = -1 - // //steer = -1 - //steer = 0 - //steer = 1 -
// : private const FWD= 1 ; // private const AWD= 2 ; // private const RWD= 3 ; // private var _privod: Number ; // , private var _maxTurnAngle: Number ; // private var _width : Number ; // private var _height : Number ; // private var _axisOffset: Number ; // , private const _angularDamping = 7 ; // private const _angularDampingReverse = 3 ; // , private const _linearDamping = 0.25 ; // , - private const _linearDampingReverse = 0.5 ; // public var _carBody:QuickObject; // private var _frontAxisBodyLeft:QuickObject; // private var _frontAxisBodyRight:QuickObject; private var _rearAxisBodyLeft:QuickObject; private var _rearAxisBodyRight:QuickObject; private var _frontLeftJoint:QuickObject; // private var _frontRightJoint:QuickObject; private var _rearLeftJoint:QuickObject; // private var _rearRightJoint:QuickObject; protected var axisHeight: Number = 4 ; // protected var axisWidth: Number = 7 ; // public var drive: int = 0 ; // public var steer: int = 0 ; //drive = 1 - //drive = 0 - , //drive = -1 - // //steer = -1 - //steer = 0 - //steer = 1 -
// : private const FWD= 1 ; // private const AWD= 2 ; // private const RWD= 3 ; // private var _privod: Number ; // , private var _maxTurnAngle: Number ; // private var _width : Number ; // private var _height : Number ; // private var _axisOffset: Number ; // , private const _angularDamping = 7 ; // private const _angularDampingReverse = 3 ; // , private const _linearDamping = 0.25 ; // , - private const _linearDampingReverse = 0.5 ; // public var _carBody:QuickObject; // private var _frontAxisBodyLeft:QuickObject; // private var _frontAxisBodyRight:QuickObject; private var _rearAxisBodyLeft:QuickObject; private var _rearAxisBodyRight:QuickObject; private var _frontLeftJoint:QuickObject; // private var _frontRightJoint:QuickObject; private var _rearLeftJoint:QuickObject; // private var _rearRightJoint:QuickObject; protected var axisHeight: Number = 4 ; // protected var axisWidth: Number = 7 ; // public var drive: int = 0 ; // public var steer: int = 0 ; //drive = 1 - //drive = 0 - , //drive = -1 - // //steer = -1 - //steer = 0 - //steer = 1 -
// : private const FWD= 1 ; // private const AWD= 2 ; // private const RWD= 3 ; // private var _privod: Number ; // , private var _maxTurnAngle: Number ; // private var _width : Number ; // private var _height : Number ; // private var _axisOffset: Number ; // , private const _angularDamping = 7 ; // private const _angularDampingReverse = 3 ; // , private const _linearDamping = 0.25 ; // , - private const _linearDampingReverse = 0.5 ; // public var _carBody:QuickObject; // private var _frontAxisBodyLeft:QuickObject; // private var _frontAxisBodyRight:QuickObject; private var _rearAxisBodyLeft:QuickObject; private var _rearAxisBodyRight:QuickObject; private var _frontLeftJoint:QuickObject; // private var _frontRightJoint:QuickObject; private var _rearLeftJoint:QuickObject; // private var _rearRightJoint:QuickObject; protected var axisHeight: Number = 4 ; // protected var axisWidth: Number = 7 ; // public var drive: int = 0 ; // public var steer: int = 0 ; //drive = 1 - //drive = 0 - , //drive = -1 - // //steer = -1 - //steer = 0 - //steer = 1 -
// : private const FWD= 1 ; // private const AWD= 2 ; // private const RWD= 3 ; // private var _privod: Number ; // , private var _maxTurnAngle: Number ; // private var _width : Number ; // private var _height : Number ; // private var _axisOffset: Number ; // , private const _angularDamping = 7 ; // private const _angularDampingReverse = 3 ; // , private const _linearDamping = 0.25 ; // , - private const _linearDampingReverse = 0.5 ; // public var _carBody:QuickObject; // private var _frontAxisBodyLeft:QuickObject; // private var _frontAxisBodyRight:QuickObject; private var _rearAxisBodyLeft:QuickObject; private var _rearAxisBodyRight:QuickObject; private var _frontLeftJoint:QuickObject; // private var _frontRightJoint:QuickObject; private var _rearLeftJoint:QuickObject; // private var _rearRightJoint:QuickObject; protected var axisHeight: Number = 4 ; // protected var axisWidth: Number = 7 ; // public var drive: int = 0 ; // public var steer: int = 0 ; //drive = 1 - //drive = 0 - , //drive = -1 - // //steer = -1 - //steer = 0 - //steer = 1 -
// : private const FWD= 1 ; // private const AWD= 2 ; // private const RWD= 3 ; // private var _privod: Number ; // , private var _maxTurnAngle: Number ; // private var _width : Number ; // private var _height : Number ; // private var _axisOffset: Number ; // , private const _angularDamping = 7 ; // private const _angularDampingReverse = 3 ; // , private const _linearDamping = 0.25 ; // , - private const _linearDampingReverse = 0.5 ; // public var _carBody:QuickObject; // private var _frontAxisBodyLeft:QuickObject; // private var _frontAxisBodyRight:QuickObject; private var _rearAxisBodyLeft:QuickObject; private var _rearAxisBodyRight:QuickObject; private var _frontLeftJoint:QuickObject; // private var _frontRightJoint:QuickObject; private var _rearLeftJoint:QuickObject; // private var _rearRightJoint:QuickObject; protected var axisHeight: Number = 4 ; // protected var axisWidth: Number = 7 ; // public var drive: int = 0 ; // public var steer: int = 0 ; //drive = 1 - //drive = 0 - , //drive = -1 - // //steer = -1 - //steer = 0 - //steer = 1 -
// : private const FWD= 1 ; // private const AWD= 2 ; // private const RWD= 3 ; // private var _privod: Number ; // , private var _maxTurnAngle: Number ; // private var _width : Number ; // private var _height : Number ; // private var _axisOffset: Number ; // , private const _angularDamping = 7 ; // private const _angularDampingReverse = 3 ; // , private const _linearDamping = 0.25 ; // , - private const _linearDampingReverse = 0.5 ; // public var _carBody:QuickObject; // private var _frontAxisBodyLeft:QuickObject; // private var _frontAxisBodyRight:QuickObject; private var _rearAxisBodyLeft:QuickObject; private var _rearAxisBodyRight:QuickObject; private var _frontLeftJoint:QuickObject; // private var _frontRightJoint:QuickObject; private var _rearLeftJoint:QuickObject; // private var _rearRightJoint:QuickObject; protected var axisHeight: Number = 4 ; // protected var axisWidth: Number = 7 ; // public var drive: int = 0 ; // public var steer: int = 0 ; //drive = 1 - //drive = 0 - , //drive = -1 - // //steer = -1 - //steer = 0 - //steer = 1 -
// : private const FWD= 1 ; // private const AWD= 2 ; // private const RWD= 3 ; // private var _privod: Number ; // , private var _maxTurnAngle: Number ; // private var _width : Number ; // private var _height : Number ; // private var _axisOffset: Number ; // , private const _angularDamping = 7 ; // private const _angularDampingReverse = 3 ; // , private const _linearDamping = 0.25 ; // , - private const _linearDampingReverse = 0.5 ; // public var _carBody:QuickObject; // private var _frontAxisBodyLeft:QuickObject; // private var _frontAxisBodyRight:QuickObject; private var _rearAxisBodyLeft:QuickObject; private var _rearAxisBodyRight:QuickObject; private var _frontLeftJoint:QuickObject; // private var _frontRightJoint:QuickObject; private var _rearLeftJoint:QuickObject; // private var _rearRightJoint:QuickObject; protected var axisHeight: Number = 4 ; // protected var axisWidth: Number = 7 ; // public var drive: int = 0 ; // public var steer: int = 0 ; //drive = 1 - //drive = 0 - , //drive = -1 - // //steer = -1 - //steer = 0 - //steer = 1 -
// : private const FWD= 1 ; // private const AWD= 2 ; // private const RWD= 3 ; // private var _privod: Number ; // , private var _maxTurnAngle: Number ; // private var _width : Number ; // private var _height : Number ; // private var _axisOffset: Number ; // , private const _angularDamping = 7 ; // private const _angularDampingReverse = 3 ; // , private const _linearDamping = 0.25 ; // , - private const _linearDampingReverse = 0.5 ; // public var _carBody:QuickObject; // private var _frontAxisBodyLeft:QuickObject; // private var _frontAxisBodyRight:QuickObject; private var _rearAxisBodyLeft:QuickObject; private var _rearAxisBodyRight:QuickObject; private var _frontLeftJoint:QuickObject; // private var _frontRightJoint:QuickObject; private var _rearLeftJoint:QuickObject; // private var _rearRightJoint:QuickObject; protected var axisHeight: Number = 4 ; // protected var axisWidth: Number = 7 ; // public var drive: int = 0 ; // public var steer: int = 0 ; //drive = 1 - //drive = 0 - , //drive = -1 - // //steer = -1 - //steer = 0 - //steer = 1 -
// : private const FWD= 1 ; // private const AWD= 2 ; // private const RWD= 3 ; // private var _privod: Number ; // , private var _maxTurnAngle: Number ; // private var _width : Number ; // private var _height : Number ; // private var _axisOffset: Number ; // , private const _angularDamping = 7 ; // private const _angularDampingReverse = 3 ; // , private const _linearDamping = 0.25 ; // , - private const _linearDampingReverse = 0.5 ; // public var _carBody:QuickObject; // private var _frontAxisBodyLeft:QuickObject; // private var _frontAxisBodyRight:QuickObject; private var _rearAxisBodyLeft:QuickObject; private var _rearAxisBodyRight:QuickObject; private var _frontLeftJoint:QuickObject; // private var _frontRightJoint:QuickObject; private var _rearLeftJoint:QuickObject; // private var _rearRightJoint:QuickObject; protected var axisHeight: Number = 4 ; // protected var axisWidth: Number = 7 ; // public var drive: int = 0 ; // public var steer: int = 0 ; //drive = 1 - //drive = 0 - , //drive = -1 - // //steer = -1 - //steer = 0 - //steer = 1 -
// : private const FWD= 1 ; // private const AWD= 2 ; // private const RWD= 3 ; // private var _privod: Number ; // , private var _maxTurnAngle: Number ; // private var _width : Number ; // private var _height : Number ; // private var _axisOffset: Number ; // , private const _angularDamping = 7 ; // private const _angularDampingReverse = 3 ; // , private const _linearDamping = 0.25 ; // , - private const _linearDampingReverse = 0.5 ; // public var _carBody:QuickObject; // private var _frontAxisBodyLeft:QuickObject; // private var _frontAxisBodyRight:QuickObject; private var _rearAxisBodyLeft:QuickObject; private var _rearAxisBodyRight:QuickObject; private var _frontLeftJoint:QuickObject; // private var _frontRightJoint:QuickObject; private var _rearLeftJoint:QuickObject; // private var _rearRightJoint:QuickObject; protected var axisHeight: Number = 4 ; // protected var axisWidth: Number = 7 ; // public var drive: int = 0 ; // public var steer: int = 0 ; //drive = 1 - //drive = 0 - , //drive = -1 - // //steer = -1 - //steer = 0 - //steer = 1 -
// : private const FWD= 1 ; // private const AWD= 2 ; // private const RWD= 3 ; // private var _privod: Number ; // , private var _maxTurnAngle: Number ; // private var _width : Number ; // private var _height : Number ; // private var _axisOffset: Number ; // , private const _angularDamping = 7 ; // private const _angularDampingReverse = 3 ; // , private const _linearDamping = 0.25 ; // , - private const _linearDampingReverse = 0.5 ; // public var _carBody:QuickObject; // private var _frontAxisBodyLeft:QuickObject; // private var _frontAxisBodyRight:QuickObject; private var _rearAxisBodyLeft:QuickObject; private var _rearAxisBodyRight:QuickObject; private var _frontLeftJoint:QuickObject; // private var _frontRightJoint:QuickObject; private var _rearLeftJoint:QuickObject; // private var _rearRightJoint:QuickObject; protected var axisHeight: Number = 4 ; // protected var axisWidth: Number = 7 ; // public var drive: int = 0 ; // public var steer: int = 0 ; //drive = 1 - //drive = 0 - , //drive = -1 - // //steer = -1 - //steer = 0 - //steer = 1 -
// : private const FWD= 1 ; // private const AWD= 2 ; // private const RWD= 3 ; // private var _privod: Number ; // , private var _maxTurnAngle: Number ; // private var _width : Number ; // private var _height : Number ; // private var _axisOffset: Number ; // , private const _angularDamping = 7 ; // private const _angularDampingReverse = 3 ; // , private const _linearDamping = 0.25 ; // , - private const _linearDampingReverse = 0.5 ; // public var _carBody:QuickObject; // private var _frontAxisBodyLeft:QuickObject; // private var _frontAxisBodyRight:QuickObject; private var _rearAxisBodyLeft:QuickObject; private var _rearAxisBodyRight:QuickObject; private var _frontLeftJoint:QuickObject; // private var _frontRightJoint:QuickObject; private var _rearLeftJoint:QuickObject; // private var _rearRightJoint:QuickObject; protected var axisHeight: Number = 4 ; // protected var axisWidth: Number = 7 ; // public var drive: int = 0 ; // public var steer: int = 0 ; //drive = 1 - //drive = 0 - , //drive = -1 - // //steer = -1 - //steer = 0 - //steer = 1 -
車輪付きの車を作成します 。
// _width = 76 ; _height = 40 ; _maxTurnAngle = 15 * Globals. DEG_TO_RAD ; // _axisOffset: Number = ( _width / 4 - axisWidth ) / Globals. RATIO // _privod = FWD; // , _carBody = world. addBox ( { width : this . _width / 2 / Globals. RATIO , height : this . _height / 2 / Globals. RATIO , x : ( this . x + this . _width / 2 ) / Globals. RATIO , y : ( this . y + this . _height / 2 ) / Globals. RATIO , density: 0.48 , driction: 0.3 , restitution: 0.4 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true , skin: null , scaleSkin: true } ) ; this ._frontAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyLeft. body , x1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._frontRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyRight. body , x1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._rearAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyLeft. body , x1: this ._rearAxisBodyLeft. x , y1: this ._rearAxisBodyLeft. y , x2: this ._rearAxisBodyLeft. x , y2: this ._rearAxisBodyLeft. y , enableLimit: true , enableMotor: false , collideConnected: false , lowerAngle: 0 , upperAngle: 0 } ) ; this ._rearRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyRight. body , x1: this ._rearAxisBodyRight. x , y1: this ._rearAxisBodyRight. y , x2: this ._rearAxisBodyRight. x , y2: this ._rearAxisBodyRight. y , enableLimit: true , enableMotor: false , lowerAngle: 0 , upperAngle: 0 } ) ;
// _width = 76 ; _height = 40 ; _maxTurnAngle = 15 * Globals. DEG_TO_RAD ; // _axisOffset: Number = ( _width / 4 - axisWidth ) / Globals. RATIO // _privod = FWD; // , _carBody = world. addBox ( { width : this . _width / 2 / Globals. RATIO , height : this . _height / 2 / Globals. RATIO , x : ( this . x + this . _width / 2 ) / Globals. RATIO , y : ( this . y + this . _height / 2 ) / Globals. RATIO , density: 0.48 , driction: 0.3 , restitution: 0.4 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true , skin: null , scaleSkin: true } ) ; this ._frontAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyLeft. body , x1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._frontRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyRight. body , x1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._rearAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyLeft. body , x1: this ._rearAxisBodyLeft. x , y1: this ._rearAxisBodyLeft. y , x2: this ._rearAxisBodyLeft. x , y2: this ._rearAxisBodyLeft. y , enableLimit: true , enableMotor: false , collideConnected: false , lowerAngle: 0 , upperAngle: 0 } ) ; this ._rearRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyRight. body , x1: this ._rearAxisBodyRight. x , y1: this ._rearAxisBodyRight. y , x2: this ._rearAxisBodyRight. x , y2: this ._rearAxisBodyRight. y , enableLimit: true , enableMotor: false , lowerAngle: 0 , upperAngle: 0 } ) ;
// _width = 76 ; _height = 40 ; _maxTurnAngle = 15 * Globals. DEG_TO_RAD ; // _axisOffset: Number = ( _width / 4 - axisWidth ) / Globals. RATIO // _privod = FWD; // , _carBody = world. addBox ( { width : this . _width / 2 / Globals. RATIO , height : this . _height / 2 / Globals. RATIO , x : ( this . x + this . _width / 2 ) / Globals. RATIO , y : ( this . y + this . _height / 2 ) / Globals. RATIO , density: 0.48 , driction: 0.3 , restitution: 0.4 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true , skin: null , scaleSkin: true } ) ; this ._frontAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyLeft. body , x1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._frontRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyRight. body , x1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._rearAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyLeft. body , x1: this ._rearAxisBodyLeft. x , y1: this ._rearAxisBodyLeft. y , x2: this ._rearAxisBodyLeft. x , y2: this ._rearAxisBodyLeft. y , enableLimit: true , enableMotor: false , collideConnected: false , lowerAngle: 0 , upperAngle: 0 } ) ; this ._rearRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyRight. body , x1: this ._rearAxisBodyRight. x , y1: this ._rearAxisBodyRight. y , x2: this ._rearAxisBodyRight. x , y2: this ._rearAxisBodyRight. y , enableLimit: true , enableMotor: false , lowerAngle: 0 , upperAngle: 0 } ) ;
// _width = 76 ; _height = 40 ; _maxTurnAngle = 15 * Globals. DEG_TO_RAD ; // _axisOffset: Number = ( _width / 4 - axisWidth ) / Globals. RATIO // _privod = FWD; // , _carBody = world. addBox ( { width : this . _width / 2 / Globals. RATIO , height : this . _height / 2 / Globals. RATIO , x : ( this . x + this . _width / 2 ) / Globals. RATIO , y : ( this . y + this . _height / 2 ) / Globals. RATIO , density: 0.48 , driction: 0.3 , restitution: 0.4 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true , skin: null , scaleSkin: true } ) ; this ._frontAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyLeft. body , x1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._frontRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyRight. body , x1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._rearAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyLeft. body , x1: this ._rearAxisBodyLeft. x , y1: this ._rearAxisBodyLeft. y , x2: this ._rearAxisBodyLeft. x , y2: this ._rearAxisBodyLeft. y , enableLimit: true , enableMotor: false , collideConnected: false , lowerAngle: 0 , upperAngle: 0 } ) ; this ._rearRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyRight. body , x1: this ._rearAxisBodyRight. x , y1: this ._rearAxisBodyRight. y , x2: this ._rearAxisBodyRight. x , y2: this ._rearAxisBodyRight. y , enableLimit: true , enableMotor: false , lowerAngle: 0 , upperAngle: 0 } ) ;
// _width = 76 ; _height = 40 ; _maxTurnAngle = 15 * Globals. DEG_TO_RAD ; // _axisOffset: Number = ( _width / 4 - axisWidth ) / Globals. RATIO // _privod = FWD; // , _carBody = world. addBox ( { width : this . _width / 2 / Globals. RATIO , height : this . _height / 2 / Globals. RATIO , x : ( this . x + this . _width / 2 ) / Globals. RATIO , y : ( this . y + this . _height / 2 ) / Globals. RATIO , density: 0.48 , driction: 0.3 , restitution: 0.4 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true , skin: null , scaleSkin: true } ) ; this ._frontAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyLeft. body , x1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._frontRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyRight. body , x1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._rearAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyLeft. body , x1: this ._rearAxisBodyLeft. x , y1: this ._rearAxisBodyLeft. y , x2: this ._rearAxisBodyLeft. x , y2: this ._rearAxisBodyLeft. y , enableLimit: true , enableMotor: false , collideConnected: false , lowerAngle: 0 , upperAngle: 0 } ) ; this ._rearRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyRight. body , x1: this ._rearAxisBodyRight. x , y1: this ._rearAxisBodyRight. y , x2: this ._rearAxisBodyRight. x , y2: this ._rearAxisBodyRight. y , enableLimit: true , enableMotor: false , lowerAngle: 0 , upperAngle: 0 } ) ;
// _width = 76 ; _height = 40 ; _maxTurnAngle = 15 * Globals. DEG_TO_RAD ; // _axisOffset: Number = ( _width / 4 - axisWidth ) / Globals. RATIO // _privod = FWD; // , _carBody = world. addBox ( { width : this . _width / 2 / Globals. RATIO , height : this . _height / 2 / Globals. RATIO , x : ( this . x + this . _width / 2 ) / Globals. RATIO , y : ( this . y + this . _height / 2 ) / Globals. RATIO , density: 0.48 , driction: 0.3 , restitution: 0.4 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true , skin: null , scaleSkin: true } ) ; this ._frontAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyLeft. body , x1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._frontRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyRight. body , x1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._rearAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyLeft. body , x1: this ._rearAxisBodyLeft. x , y1: this ._rearAxisBodyLeft. y , x2: this ._rearAxisBodyLeft. x , y2: this ._rearAxisBodyLeft. y , enableLimit: true , enableMotor: false , collideConnected: false , lowerAngle: 0 , upperAngle: 0 } ) ; this ._rearRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyRight. body , x1: this ._rearAxisBodyRight. x , y1: this ._rearAxisBodyRight. y , x2: this ._rearAxisBodyRight. x , y2: this ._rearAxisBodyRight. y , enableLimit: true , enableMotor: false , lowerAngle: 0 , upperAngle: 0 } ) ;
// _width = 76 ; _height = 40 ; _maxTurnAngle = 15 * Globals. DEG_TO_RAD ; // _axisOffset: Number = ( _width / 4 - axisWidth ) / Globals. RATIO // _privod = FWD; // , _carBody = world. addBox ( { width : this . _width / 2 / Globals. RATIO , height : this . _height / 2 / Globals. RATIO , x : ( this . x + this . _width / 2 ) / Globals. RATIO , y : ( this . y + this . _height / 2 ) / Globals. RATIO , density: 0.48 , driction: 0.3 , restitution: 0.4 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true , skin: null , scaleSkin: true } ) ; this ._frontAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyLeft. body , x1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._frontRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyRight. body , x1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._rearAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyLeft. body , x1: this ._rearAxisBodyLeft. x , y1: this ._rearAxisBodyLeft. y , x2: this ._rearAxisBodyLeft. x , y2: this ._rearAxisBodyLeft. y , enableLimit: true , enableMotor: false , collideConnected: false , lowerAngle: 0 , upperAngle: 0 } ) ; this ._rearRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyRight. body , x1: this ._rearAxisBodyRight. x , y1: this ._rearAxisBodyRight. y , x2: this ._rearAxisBodyRight. x , y2: this ._rearAxisBodyRight. y , enableLimit: true , enableMotor: false , lowerAngle: 0 , upperAngle: 0 } ) ;
// _width = 76 ; _height = 40 ; _maxTurnAngle = 15 * Globals. DEG_TO_RAD ; // _axisOffset: Number = ( _width / 4 - axisWidth ) / Globals. RATIO // _privod = FWD; // , _carBody = world. addBox ( { width : this . _width / 2 / Globals. RATIO , height : this . _height / 2 / Globals. RATIO , x : ( this . x + this . _width / 2 ) / Globals. RATIO , y : ( this . y + this . _height / 2 ) / Globals. RATIO , density: 0.48 , driction: 0.3 , restitution: 0.4 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true , skin: null , scaleSkin: true } ) ; this ._frontAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyLeft. body , x1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._frontRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyRight. body , x1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._rearAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyLeft. body , x1: this ._rearAxisBodyLeft. x , y1: this ._rearAxisBodyLeft. y , x2: this ._rearAxisBodyLeft. x , y2: this ._rearAxisBodyLeft. y , enableLimit: true , enableMotor: false , collideConnected: false , lowerAngle: 0 , upperAngle: 0 } ) ; this ._rearRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyRight. body , x1: this ._rearAxisBodyRight. x , y1: this ._rearAxisBodyRight. y , x2: this ._rearAxisBodyRight. x , y2: this ._rearAxisBodyRight. y , enableLimit: true , enableMotor: false , lowerAngle: 0 , upperAngle: 0 } ) ;
// _width = 76 ; _height = 40 ; _maxTurnAngle = 15 * Globals. DEG_TO_RAD ; // _axisOffset: Number = ( _width / 4 - axisWidth ) / Globals. RATIO // _privod = FWD; // , _carBody = world. addBox ( { width : this . _width / 2 / Globals. RATIO , height : this . _height / 2 / Globals. RATIO , x : ( this . x + this . _width / 2 ) / Globals. RATIO , y : ( this . y + this . _height / 2 ) / Globals. RATIO , density: 0.48 , driction: 0.3 , restitution: 0.4 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true , skin: null , scaleSkin: true } ) ; this ._frontAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyLeft. body , x1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._frontRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyRight. body , x1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._rearAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyLeft. body , x1: this ._rearAxisBodyLeft. x , y1: this ._rearAxisBodyLeft. y , x2: this ._rearAxisBodyLeft. x , y2: this ._rearAxisBodyLeft. y , enableLimit: true , enableMotor: false , collideConnected: false , lowerAngle: 0 , upperAngle: 0 } ) ; this ._rearRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyRight. body , x1: this ._rearAxisBodyRight. x , y1: this ._rearAxisBodyRight. y , x2: this ._rearAxisBodyRight. x , y2: this ._rearAxisBodyRight. y , enableLimit: true , enableMotor: false , lowerAngle: 0 , upperAngle: 0 } ) ;
// _width = 76 ; _height = 40 ; _maxTurnAngle = 15 * Globals. DEG_TO_RAD ; // _axisOffset: Number = ( _width / 4 - axisWidth ) / Globals. RATIO // _privod = FWD; // , _carBody = world. addBox ( { width : this . _width / 2 / Globals. RATIO , height : this . _height / 2 / Globals. RATIO , x : ( this . x + this . _width / 2 ) / Globals. RATIO , y : ( this . y + this . _height / 2 ) / Globals. RATIO , density: 0.48 , driction: 0.3 , restitution: 0.4 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true , skin: null , scaleSkin: true } ) ; this ._frontAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyLeft. body , x1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._frontRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyRight. body , x1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._rearAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyLeft. body , x1: this ._rearAxisBodyLeft. x , y1: this ._rearAxisBodyLeft. y , x2: this ._rearAxisBodyLeft. x , y2: this ._rearAxisBodyLeft. y , enableLimit: true , enableMotor: false , collideConnected: false , lowerAngle: 0 , upperAngle: 0 } ) ; this ._rearRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyRight. body , x1: this ._rearAxisBodyRight. x , y1: this ._rearAxisBodyRight. y , x2: this ._rearAxisBodyRight. x , y2: this ._rearAxisBodyRight. y , enableLimit: true , enableMotor: false , lowerAngle: 0 , upperAngle: 0 } ) ;
// _width = 76 ; _height = 40 ; _maxTurnAngle = 15 * Globals. DEG_TO_RAD ; // _axisOffset: Number = ( _width / 4 - axisWidth ) / Globals. RATIO // _privod = FWD; // , _carBody = world. addBox ( { width : this . _width / 2 / Globals. RATIO , height : this . _height / 2 / Globals. RATIO , x : ( this . x + this . _width / 2 ) / Globals. RATIO , y : ( this . y + this . _height / 2 ) / Globals. RATIO , density: 0.48 , driction: 0.3 , restitution: 0.4 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true , skin: null , scaleSkin: true } ) ; this ._frontAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyLeft. body , x1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._frontRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyRight. body , x1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._rearAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyLeft. body , x1: this ._rearAxisBodyLeft. x , y1: this ._rearAxisBodyLeft. y , x2: this ._rearAxisBodyLeft. x , y2: this ._rearAxisBodyLeft. y , enableLimit: true , enableMotor: false , collideConnected: false , lowerAngle: 0 , upperAngle: 0 } ) ; this ._rearRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyRight. body , x1: this ._rearAxisBodyRight. x , y1: this ._rearAxisBodyRight. y , x2: this ._rearAxisBodyRight. x , y2: this ._rearAxisBodyRight. y , enableLimit: true , enableMotor: false , lowerAngle: 0 , upperAngle: 0 } ) ;
// _width = 76 ; _height = 40 ; _maxTurnAngle = 15 * Globals. DEG_TO_RAD ; // _axisOffset: Number = ( _width / 4 - axisWidth ) / Globals. RATIO // _privod = FWD; // , _carBody = world. addBox ( { width : this . _width / 2 / Globals. RATIO , height : this . _height / 2 / Globals. RATIO , x : ( this . x + this . _width / 2 ) / Globals. RATIO , y : ( this . y + this . _height / 2 ) / Globals. RATIO , density: 0.48 , driction: 0.3 , restitution: 0.4 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true , skin: null , scaleSkin: true } ) ; this ._frontAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyLeft. body , x1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._frontRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyRight. body , x1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._rearAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyLeft. body , x1: this ._rearAxisBodyLeft. x , y1: this ._rearAxisBodyLeft. y , x2: this ._rearAxisBodyLeft. x , y2: this ._rearAxisBodyLeft. y , enableLimit: true , enableMotor: false , collideConnected: false , lowerAngle: 0 , upperAngle: 0 } ) ; this ._rearRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyRight. body , x1: this ._rearAxisBodyRight. x , y1: this ._rearAxisBodyRight. y , x2: this ._rearAxisBodyRight. x , y2: this ._rearAxisBodyRight. y , enableLimit: true , enableMotor: false , lowerAngle: 0 , upperAngle: 0 } ) ;
// _width = 76 ; _height = 40 ; _maxTurnAngle = 15 * Globals. DEG_TO_RAD ; // _axisOffset: Number = ( _width / 4 - axisWidth ) / Globals. RATIO // _privod = FWD; // , _carBody = world. addBox ( { width : this . _width / 2 / Globals. RATIO , height : this . _height / 2 / Globals. RATIO , x : ( this . x + this . _width / 2 ) / Globals. RATIO , y : ( this . y + this . _height / 2 ) / Globals. RATIO , density: 0.48 , driction: 0.3 , restitution: 0.4 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true , skin: null , scaleSkin: true } ) ; this ._frontAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyLeft. body , x1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._frontRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyRight. body , x1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._rearAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyLeft. body , x1: this ._rearAxisBodyLeft. x , y1: this ._rearAxisBodyLeft. y , x2: this ._rearAxisBodyLeft. x , y2: this ._rearAxisBodyLeft. y , enableLimit: true , enableMotor: false , collideConnected: false , lowerAngle: 0 , upperAngle: 0 } ) ; this ._rearRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyRight. body , x1: this ._rearAxisBodyRight. x , y1: this ._rearAxisBodyRight. y , x2: this ._rearAxisBodyRight. x , y2: this ._rearAxisBodyRight. y , enableLimit: true , enableMotor: false , lowerAngle: 0 , upperAngle: 0 } ) ;
// _width = 76 ; _height = 40 ; _maxTurnAngle = 15 * Globals. DEG_TO_RAD ; // _axisOffset: Number = ( _width / 4 - axisWidth ) / Globals. RATIO // _privod = FWD; // , _carBody = world. addBox ( { width : this . _width / 2 / Globals. RATIO , height : this . _height / 2 / Globals. RATIO , x : ( this . x + this . _width / 2 ) / Globals. RATIO , y : ( this . y + this . _height / 2 ) / Globals. RATIO , density: 0.48 , driction: 0.3 , restitution: 0.4 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true , skin: null , scaleSkin: true } ) ; this ._frontAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyLeft. body , x1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._frontRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyRight. body , x1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._rearAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyLeft. body , x1: this ._rearAxisBodyLeft. x , y1: this ._rearAxisBodyLeft. y , x2: this ._rearAxisBodyLeft. x , y2: this ._rearAxisBodyLeft. y , enableLimit: true , enableMotor: false , collideConnected: false , lowerAngle: 0 , upperAngle: 0 } ) ; this ._rearRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyRight. body , x1: this ._rearAxisBodyRight. x , y1: this ._rearAxisBodyRight. y , x2: this ._rearAxisBodyRight. x , y2: this ._rearAxisBodyRight. y , enableLimit: true , enableMotor: false , lowerAngle: 0 , upperAngle: 0 } ) ;
// _width = 76 ; _height = 40 ; _maxTurnAngle = 15 * Globals. DEG_TO_RAD ; // _axisOffset: Number = ( _width / 4 - axisWidth ) / Globals. RATIO // _privod = FWD; // , _carBody = world. addBox ( { width : this . _width / 2 / Globals. RATIO , height : this . _height / 2 / Globals. RATIO , x : ( this . x + this . _width / 2 ) / Globals. RATIO , y : ( this . y + this . _height / 2 ) / Globals. RATIO , density: 0.48 , driction: 0.3 , restitution: 0.4 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true , skin: null , scaleSkin: true } ) ; this ._frontAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyLeft. body , x1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._frontRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyRight. body , x1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._rearAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyLeft. body , x1: this ._rearAxisBodyLeft. x , y1: this ._rearAxisBodyLeft. y , x2: this ._rearAxisBodyLeft. x , y2: this ._rearAxisBodyLeft. y , enableLimit: true , enableMotor: false , collideConnected: false , lowerAngle: 0 , upperAngle: 0 } ) ; this ._rearRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyRight. body , x1: this ._rearAxisBodyRight. x , y1: this ._rearAxisBodyRight. y , x2: this ._rearAxisBodyRight. x , y2: this ._rearAxisBodyRight. y , enableLimit: true , enableMotor: false , lowerAngle: 0 , upperAngle: 0 } ) ;
// _width = 76 ; _height = 40 ; _maxTurnAngle = 15 * Globals. DEG_TO_RAD ; // _axisOffset: Number = ( _width / 4 - axisWidth ) / Globals. RATIO // _privod = FWD; // , _carBody = world. addBox ( { width : this . _width / 2 / Globals. RATIO , height : this . _height / 2 / Globals. RATIO , x : ( this . x + this . _width / 2 ) / Globals. RATIO , y : ( this . y + this . _height / 2 ) / Globals. RATIO , density: 0.48 , driction: 0.3 , restitution: 0.4 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true , skin: null , scaleSkin: true } ) ; this ._frontAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyLeft. body , x1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._frontRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyRight. body , x1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._rearAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyLeft. body , x1: this ._rearAxisBodyLeft. x , y1: this ._rearAxisBodyLeft. y , x2: this ._rearAxisBodyLeft. x , y2: this ._rearAxisBodyLeft. y , enableLimit: true , enableMotor: false , collideConnected: false , lowerAngle: 0 , upperAngle: 0 } ) ; this ._rearRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyRight. body , x1: this ._rearAxisBodyRight. x , y1: this ._rearAxisBodyRight. y , x2: this ._rearAxisBodyRight. x , y2: this ._rearAxisBodyRight. y , enableLimit: true , enableMotor: false , lowerAngle: 0 , upperAngle: 0 } ) ;
// _width = 76 ; _height = 40 ; _maxTurnAngle = 15 * Globals. DEG_TO_RAD ; // _axisOffset: Number = ( _width / 4 - axisWidth ) / Globals. RATIO // _privod = FWD; // , _carBody = world. addBox ( { width : this . _width / 2 / Globals. RATIO , height : this . _height / 2 / Globals. RATIO , x : ( this . x + this . _width / 2 ) / Globals. RATIO , y : ( this . y + this . _height / 2 ) / Globals. RATIO , density: 0.48 , driction: 0.3 , restitution: 0.4 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true , skin: null , scaleSkin: true } ) ; this ._frontAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyLeft. body , x1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._frontRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyRight. body , x1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._rearAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyLeft. body , x1: this ._rearAxisBodyLeft. x , y1: this ._rearAxisBodyLeft. y , x2: this ._rearAxisBodyLeft. x , y2: this ._rearAxisBodyLeft. y , enableLimit: true , enableMotor: false , collideConnected: false , lowerAngle: 0 , upperAngle: 0 } ) ; this ._rearRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyRight. body , x1: this ._rearAxisBodyRight. x , y1: this ._rearAxisBodyRight. y , x2: this ._rearAxisBodyRight. x , y2: this ._rearAxisBodyRight. y , enableLimit: true , enableMotor: false , lowerAngle: 0 , upperAngle: 0 } ) ;
// _width = 76 ; _height = 40 ; _maxTurnAngle = 15 * Globals. DEG_TO_RAD ; // _axisOffset: Number = ( _width / 4 - axisWidth ) / Globals. RATIO // _privod = FWD; // , _carBody = world. addBox ( { width : this . _width / 2 / Globals. RATIO , height : this . _height / 2 / Globals. RATIO , x : ( this . x + this . _width / 2 ) / Globals. RATIO , y : ( this . y + this . _height / 2 ) / Globals. RATIO , density: 0.48 , driction: 0.3 , restitution: 0.4 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true , skin: null , scaleSkin: true } ) ; this ._frontAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyLeft. body , x1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._frontRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyRight. body , x1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._rearAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyLeft. body , x1: this ._rearAxisBodyLeft. x , y1: this ._rearAxisBodyLeft. y , x2: this ._rearAxisBodyLeft. x , y2: this ._rearAxisBodyLeft. y , enableLimit: true , enableMotor: false , collideConnected: false , lowerAngle: 0 , upperAngle: 0 } ) ; this ._rearRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyRight. body , x1: this ._rearAxisBodyRight. x , y1: this ._rearAxisBodyRight. y , x2: this ._rearAxisBodyRight. x , y2: this ._rearAxisBodyRight. y , enableLimit: true , enableMotor: false , lowerAngle: 0 , upperAngle: 0 } ) ;
// _width = 76 ; _height = 40 ; _maxTurnAngle = 15 * Globals. DEG_TO_RAD ; // _axisOffset: Number = ( _width / 4 - axisWidth ) / Globals. RATIO // _privod = FWD; // , _carBody = world. addBox ( { width : this . _width / 2 / Globals. RATIO , height : this . _height / 2 / Globals. RATIO , x : ( this . x + this . _width / 2 ) / Globals. RATIO , y : ( this . y + this . _height / 2 ) / Globals. RATIO , density: 0.48 , driction: 0.3 , restitution: 0.4 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true , skin: null , scaleSkin: true } ) ; this ._frontAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyLeft. body , x1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._frontRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyRight. body , x1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._rearAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyLeft. body , x1: this ._rearAxisBodyLeft. x , y1: this ._rearAxisBodyLeft. y , x2: this ._rearAxisBodyLeft. x , y2: this ._rearAxisBodyLeft. y , enableLimit: true , enableMotor: false , collideConnected: false , lowerAngle: 0 , upperAngle: 0 } ) ; this ._rearRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyRight. body , x1: this ._rearAxisBodyRight. x , y1: this ._rearAxisBodyRight. y , x2: this ._rearAxisBodyRight. x , y2: this ._rearAxisBodyRight. y , enableLimit: true , enableMotor: false , lowerAngle: 0 , upperAngle: 0 } ) ;
// _width = 76 ; _height = 40 ; _maxTurnAngle = 15 * Globals. DEG_TO_RAD ; // _axisOffset: Number = ( _width / 4 - axisWidth ) / Globals. RATIO // _privod = FWD; // , _carBody = world. addBox ( { width : this . _width / 2 / Globals. RATIO , height : this . _height / 2 / Globals. RATIO , x : ( this . x + this . _width / 2 ) / Globals. RATIO , y : ( this . y + this . _height / 2 ) / Globals. RATIO , density: 0.48 , driction: 0.3 , restitution: 0.4 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true , skin: null , scaleSkin: true } ) ; this ._frontAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyLeft. body , x1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._frontRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyRight. body , x1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._rearAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyLeft. body , x1: this ._rearAxisBodyLeft. x , y1: this ._rearAxisBodyLeft. y , x2: this ._rearAxisBodyLeft. x , y2: this ._rearAxisBodyLeft. y , enableLimit: true , enableMotor: false , collideConnected: false , lowerAngle: 0 , upperAngle: 0 } ) ; this ._rearRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyRight. body , x1: this ._rearAxisBodyRight. x , y1: this ._rearAxisBodyRight. y , x2: this ._rearAxisBodyRight. x , y2: this ._rearAxisBodyRight. y , enableLimit: true , enableMotor: false , lowerAngle: 0 , upperAngle: 0 } ) ;
// _width = 76 ; _height = 40 ; _maxTurnAngle = 15 * Globals. DEG_TO_RAD ; // _axisOffset: Number = ( _width / 4 - axisWidth ) / Globals. RATIO // _privod = FWD; // , _carBody = world. addBox ( { width : this . _width / 2 / Globals. RATIO , height : this . _height / 2 / Globals. RATIO , x : ( this . x + this . _width / 2 ) / Globals. RATIO , y : ( this . y + this . _height / 2 ) / Globals. RATIO , density: 0.48 , driction: 0.3 , restitution: 0.4 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true , skin: null , scaleSkin: true } ) ; this ._frontAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyLeft. body , x1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._frontRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyRight. body , x1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._rearAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyLeft. body , x1: this ._rearAxisBodyLeft. x , y1: this ._rearAxisBodyLeft. y , x2: this ._rearAxisBodyLeft. x , y2: this ._rearAxisBodyLeft. y , enableLimit: true , enableMotor: false , collideConnected: false , lowerAngle: 0 , upperAngle: 0 } ) ; this ._rearRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyRight. body , x1: this ._rearAxisBodyRight. x , y1: this ._rearAxisBodyRight. y , x2: this ._rearAxisBodyRight. x , y2: this ._rearAxisBodyRight. y , enableLimit: true , enableMotor: false , lowerAngle: 0 , upperAngle: 0 } ) ;
// _width = 76 ; _height = 40 ; _maxTurnAngle = 15 * Globals. DEG_TO_RAD ; // _axisOffset: Number = ( _width / 4 - axisWidth ) / Globals. RATIO // _privod = FWD; // , _carBody = world. addBox ( { width : this . _width / 2 / Globals. RATIO , height : this . _height / 2 / Globals. RATIO , x : ( this . x + this . _width / 2 ) / Globals. RATIO , y : ( this . y + this . _height / 2 ) / Globals. RATIO , density: 0.48 , driction: 0.3 , restitution: 0.4 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true , skin: null , scaleSkin: true } ) ; this ._frontAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyLeft. body , x1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._frontRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyRight. body , x1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._rearAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyLeft. body , x1: this ._rearAxisBodyLeft. x , y1: this ._rearAxisBodyLeft. y , x2: this ._rearAxisBodyLeft. x , y2: this ._rearAxisBodyLeft. y , enableLimit: true , enableMotor: false , collideConnected: false , lowerAngle: 0 , upperAngle: 0 } ) ; this ._rearRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyRight. body , x1: this ._rearAxisBodyRight. x , y1: this ._rearAxisBodyRight. y , x2: this ._rearAxisBodyRight. x , y2: this ._rearAxisBodyRight. y , enableLimit: true , enableMotor: false , lowerAngle: 0 , upperAngle: 0 } ) ;
// _width = 76 ; _height = 40 ; _maxTurnAngle = 15 * Globals. DEG_TO_RAD ; // _axisOffset: Number = ( _width / 4 - axisWidth ) / Globals. RATIO // _privod = FWD; // , _carBody = world. addBox ( { width : this . _width / 2 / Globals. RATIO , height : this . _height / 2 / Globals. RATIO , x : ( this . x + this . _width / 2 ) / Globals. RATIO , y : ( this . y + this . _height / 2 ) / Globals. RATIO , density: 0.48 , driction: 0.3 , restitution: 0.4 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true , skin: null , scaleSkin: true } ) ; this ._frontAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyLeft. body , x1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._frontRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyRight. body , x1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._rearAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyLeft. body , x1: this ._rearAxisBodyLeft. x , y1: this ._rearAxisBodyLeft. y , x2: this ._rearAxisBodyLeft. x , y2: this ._rearAxisBodyLeft. y , enableLimit: true , enableMotor: false , collideConnected: false , lowerAngle: 0 , upperAngle: 0 } ) ; this ._rearRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyRight. body , x1: this ._rearAxisBodyRight. x , y1: this ._rearAxisBodyRight. y , x2: this ._rearAxisBodyRight. x , y2: this ._rearAxisBodyRight. y , enableLimit: true , enableMotor: false , lowerAngle: 0 , upperAngle: 0 } ) ;
// _width = 76 ; _height = 40 ; _maxTurnAngle = 15 * Globals. DEG_TO_RAD ; // _axisOffset: Number = ( _width / 4 - axisWidth ) / Globals. RATIO // _privod = FWD; // , _carBody = world. addBox ( { width : this . _width / 2 / Globals. RATIO , height : this . _height / 2 / Globals. RATIO , x : ( this . x + this . _width / 2 ) / Globals. RATIO , y : ( this . y + this . _height / 2 ) / Globals. RATIO , density: 0.48 , driction: 0.3 , restitution: 0.4 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true , skin: null , scaleSkin: true } ) ; this ._frontAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyLeft. body , x1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._frontRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyRight. body , x1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._rearAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyLeft. body , x1: this ._rearAxisBodyLeft. x , y1: this ._rearAxisBodyLeft. y , x2: this ._rearAxisBodyLeft. x , y2: this ._rearAxisBodyLeft. y , enableLimit: true , enableMotor: false , collideConnected: false , lowerAngle: 0 , upperAngle: 0 } ) ; this ._rearRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyRight. body , x1: this ._rearAxisBodyRight. x , y1: this ._rearAxisBodyRight. y , x2: this ._rearAxisBodyRight. x , y2: this ._rearAxisBodyRight. y , enableLimit: true , enableMotor: false , lowerAngle: 0 , upperAngle: 0 } ) ;
// _width = 76 ; _height = 40 ; _maxTurnAngle = 15 * Globals. DEG_TO_RAD ; // _axisOffset: Number = ( _width / 4 - axisWidth ) / Globals. RATIO // _privod = FWD; // , _carBody = world. addBox ( { width : this . _width / 2 / Globals. RATIO , height : this . _height / 2 / Globals. RATIO , x : ( this . x + this . _width / 2 ) / Globals. RATIO , y : ( this . y + this . _height / 2 ) / Globals. RATIO , density: 0.48 , driction: 0.3 , restitution: 0.4 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true , skin: null , scaleSkin: true } ) ; this ._frontAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyLeft. body , x1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._frontRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyRight. body , x1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._rearAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyLeft. body , x1: this ._rearAxisBodyLeft. x , y1: this ._rearAxisBodyLeft. y , x2: this ._rearAxisBodyLeft. x , y2: this ._rearAxisBodyLeft. y , enableLimit: true , enableMotor: false , collideConnected: false , lowerAngle: 0 , upperAngle: 0 } ) ; this ._rearRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyRight. body , x1: this ._rearAxisBodyRight. x , y1: this ._rearAxisBodyRight. y , x2: this ._rearAxisBodyRight. x , y2: this ._rearAxisBodyRight. y , enableLimit: true , enableMotor: false , lowerAngle: 0 , upperAngle: 0 } ) ;
// _width = 76 ; _height = 40 ; _maxTurnAngle = 15 * Globals. DEG_TO_RAD ; // _axisOffset: Number = ( _width / 4 - axisWidth ) / Globals. RATIO // _privod = FWD; // , _carBody = world. addBox ( { width : this . _width / 2 / Globals. RATIO , height : this . _height / 2 / Globals. RATIO , x : ( this . x + this . _width / 2 ) / Globals. RATIO , y : ( this . y + this . _height / 2 ) / Globals. RATIO , density: 0.48 , driction: 0.3 , restitution: 0.4 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true , skin: null , scaleSkin: true } ) ; this ._frontAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyLeft. body , x1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._frontRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyRight. body , x1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._rearAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyLeft. body , x1: this ._rearAxisBodyLeft. x , y1: this ._rearAxisBodyLeft. y , x2: this ._rearAxisBodyLeft. x , y2: this ._rearAxisBodyLeft. y , enableLimit: true , enableMotor: false , collideConnected: false , lowerAngle: 0 , upperAngle: 0 } ) ; this ._rearRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyRight. body , x1: this ._rearAxisBodyRight. x , y1: this ._rearAxisBodyRight. y , x2: this ._rearAxisBodyRight. x , y2: this ._rearAxisBodyRight. y , enableLimit: true , enableMotor: false , lowerAngle: 0 , upperAngle: 0 } ) ;
// _width = 76 ; _height = 40 ; _maxTurnAngle = 15 * Globals. DEG_TO_RAD ; // _axisOffset: Number = ( _width / 4 - axisWidth ) / Globals. RATIO // _privod = FWD; // , _carBody = world. addBox ( { width : this . _width / 2 / Globals. RATIO , height : this . _height / 2 / Globals. RATIO , x : ( this . x + this . _width / 2 ) / Globals. RATIO , y : ( this . y + this . _height / 2 ) / Globals. RATIO , density: 0.48 , driction: 0.3 , restitution: 0.4 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true , skin: null , scaleSkin: true } ) ; this ._frontAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyLeft. body , x1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._frontRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyRight. body , x1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._rearAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyLeft. body , x1: this ._rearAxisBodyLeft. x , y1: this ._rearAxisBodyLeft. y , x2: this ._rearAxisBodyLeft. x , y2: this ._rearAxisBodyLeft. y , enableLimit: true , enableMotor: false , collideConnected: false , lowerAngle: 0 , upperAngle: 0 } ) ; this ._rearRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyRight. body , x1: this ._rearAxisBodyRight. x , y1: this ._rearAxisBodyRight. y , x2: this ._rearAxisBodyRight. x , y2: this ._rearAxisBodyRight. y , enableLimit: true , enableMotor: false , lowerAngle: 0 , upperAngle: 0 } ) ;
// _width = 76 ; _height = 40 ; _maxTurnAngle = 15 * Globals. DEG_TO_RAD ; // _axisOffset: Number = ( _width / 4 - axisWidth ) / Globals. RATIO // _privod = FWD; // , _carBody = world. addBox ( { width : this . _width / 2 / Globals. RATIO , height : this . _height / 2 / Globals. RATIO , x : ( this . x + this . _width / 2 ) / Globals. RATIO , y : ( this . y + this . _height / 2 ) / Globals. RATIO , density: 0.48 , driction: 0.3 , restitution: 0.4 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true , skin: null , scaleSkin: true } ) ; this ._frontAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyLeft. body , x1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._frontRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyRight. body , x1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._rearAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyLeft. body , x1: this ._rearAxisBodyLeft. x , y1: this ._rearAxisBodyLeft. y , x2: this ._rearAxisBodyLeft. x , y2: this ._rearAxisBodyLeft. y , enableLimit: true , enableMotor: false , collideConnected: false , lowerAngle: 0 , upperAngle: 0 } ) ; this ._rearRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyRight. body , x1: this ._rearAxisBodyRight. x , y1: this ._rearAxisBodyRight. y , x2: this ._rearAxisBodyRight. x , y2: this ._rearAxisBodyRight. y , enableLimit: true , enableMotor: false , lowerAngle: 0 , upperAngle: 0 } ) ;
// _width = 76 ; _height = 40 ; _maxTurnAngle = 15 * Globals. DEG_TO_RAD ; // _axisOffset: Number = ( _width / 4 - axisWidth ) / Globals. RATIO // _privod = FWD; // , _carBody = world. addBox ( { width : this . _width / 2 / Globals. RATIO , height : this . _height / 2 / Globals. RATIO , x : ( this . x + this . _width / 2 ) / Globals. RATIO , y : ( this . y + this . _height / 2 ) / Globals. RATIO , density: 0.48 , driction: 0.3 , restitution: 0.4 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true , skin: null , scaleSkin: true } ) ; this ._frontAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyLeft. body , x1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._frontRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyRight. body , x1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._rearAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyLeft. body , x1: this ._rearAxisBodyLeft. x , y1: this ._rearAxisBodyLeft. y , x2: this ._rearAxisBodyLeft. x , y2: this ._rearAxisBodyLeft. y , enableLimit: true , enableMotor: false , collideConnected: false , lowerAngle: 0 , upperAngle: 0 } ) ; this ._rearRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyRight. body , x1: this ._rearAxisBodyRight. x , y1: this ._rearAxisBodyRight. y , x2: this ._rearAxisBodyRight. x , y2: this ._rearAxisBodyRight. y , enableLimit: true , enableMotor: false , lowerAngle: 0 , upperAngle: 0 } ) ;
// _width = 76 ; _height = 40 ; _maxTurnAngle = 15 * Globals. DEG_TO_RAD ; // _axisOffset: Number = ( _width / 4 - axisWidth ) / Globals. RATIO // _privod = FWD; // , _carBody = world. addBox ( { width : this . _width / 2 / Globals. RATIO , height : this . _height / 2 / Globals. RATIO , x : ( this . x + this . _width / 2 ) / Globals. RATIO , y : ( this . y + this . _height / 2 ) / Globals. RATIO , density: 0.48 , driction: 0.3 , restitution: 0.4 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true , skin: null , scaleSkin: true } ) ; this ._frontAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyLeft. body , x1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._frontRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyRight. body , x1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._rearAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyLeft. body , x1: this ._rearAxisBodyLeft. x , y1: this ._rearAxisBodyLeft. y , x2: this ._rearAxisBodyLeft. x , y2: this ._rearAxisBodyLeft. y , enableLimit: true , enableMotor: false , collideConnected: false , lowerAngle: 0 , upperAngle: 0 } ) ; this ._rearRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyRight. body , x1: this ._rearAxisBodyRight. x , y1: this ._rearAxisBodyRight. y , x2: this ._rearAxisBodyRight. x , y2: this ._rearAxisBodyRight. y , enableLimit: true , enableMotor: false , lowerAngle: 0 , upperAngle: 0 } ) ;
// _width = 76 ; _height = 40 ; _maxTurnAngle = 15 * Globals. DEG_TO_RAD ; // _axisOffset: Number = ( _width / 4 - axisWidth ) / Globals. RATIO // _privod = FWD; // , _carBody = world. addBox ( { width : this . _width / 2 / Globals. RATIO , height : this . _height / 2 / Globals. RATIO , x : ( this . x + this . _width / 2 ) / Globals. RATIO , y : ( this . y + this . _height / 2 ) / Globals. RATIO , density: 0.48 , driction: 0.3 , restitution: 0.4 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true , skin: null , scaleSkin: true } ) ; this ._frontAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyLeft. body , x1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._frontRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyRight. body , x1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._rearAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyLeft. body , x1: this ._rearAxisBodyLeft. x , y1: this ._rearAxisBodyLeft. y , x2: this ._rearAxisBodyLeft. x , y2: this ._rearAxisBodyLeft. y , enableLimit: true , enableMotor: false , collideConnected: false , lowerAngle: 0 , upperAngle: 0 } ) ; this ._rearRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyRight. body , x1: this ._rearAxisBodyRight. x , y1: this ._rearAxisBodyRight. y , x2: this ._rearAxisBodyRight. x , y2: this ._rearAxisBodyRight. y , enableLimit: true , enableMotor: false , lowerAngle: 0 , upperAngle: 0 } ) ;
// _width = 76 ; _height = 40 ; _maxTurnAngle = 15 * Globals. DEG_TO_RAD ; // _axisOffset: Number = ( _width / 4 - axisWidth ) / Globals. RATIO // _privod = FWD; // , _carBody = world. addBox ( { width : this . _width / 2 / Globals. RATIO , height : this . _height / 2 / Globals. RATIO , x : ( this . x + this . _width / 2 ) / Globals. RATIO , y : ( this . y + this . _height / 2 ) / Globals. RATIO , density: 0.48 , driction: 0.3 , restitution: 0.4 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true , skin: null , scaleSkin: true } ) ; this ._frontAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyLeft. body , x1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._frontRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyRight. body , x1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._rearAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyLeft. body , x1: this ._rearAxisBodyLeft. x , y1: this ._rearAxisBodyLeft. y , x2: this ._rearAxisBodyLeft. x , y2: this ._rearAxisBodyLeft. y , enableLimit: true , enableMotor: false , collideConnected: false , lowerAngle: 0 , upperAngle: 0 } ) ; this ._rearRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyRight. body , x1: this ._rearAxisBodyRight. x , y1: this ._rearAxisBodyRight. y , x2: this ._rearAxisBodyRight. x , y2: this ._rearAxisBodyRight. y , enableLimit: true , enableMotor: false , lowerAngle: 0 , upperAngle: 0 } ) ;
// _width = 76 ; _height = 40 ; _maxTurnAngle = 15 * Globals. DEG_TO_RAD ; // _axisOffset: Number = ( _width / 4 - axisWidth ) / Globals. RATIO // _privod = FWD; // , _carBody = world. addBox ( { width : this . _width / 2 / Globals. RATIO , height : this . _height / 2 / Globals. RATIO , x : ( this . x + this . _width / 2 ) / Globals. RATIO , y : ( this . y + this . _height / 2 ) / Globals. RATIO , density: 0.48 , driction: 0.3 , restitution: 0.4 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true , skin: null , scaleSkin: true } ) ; this ._frontAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyLeft. body , x1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._frontRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyRight. body , x1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._rearAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyLeft. body , x1: this ._rearAxisBodyLeft. x , y1: this ._rearAxisBodyLeft. y , x2: this ._rearAxisBodyLeft. x , y2: this ._rearAxisBodyLeft. y , enableLimit: true , enableMotor: false , collideConnected: false , lowerAngle: 0 , upperAngle: 0 } ) ; this ._rearRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyRight. body , x1: this ._rearAxisBodyRight. x , y1: this ._rearAxisBodyRight. y , x2: this ._rearAxisBodyRight. x , y2: this ._rearAxisBodyRight. y , enableLimit: true , enableMotor: false , lowerAngle: 0 , upperAngle: 0 } ) ;
// _width = 76 ; _height = 40 ; _maxTurnAngle = 15 * Globals. DEG_TO_RAD ; // _axisOffset: Number = ( _width / 4 - axisWidth ) / Globals. RATIO // _privod = FWD; // , _carBody = world. addBox ( { width : this . _width / 2 / Globals. RATIO , height : this . _height / 2 / Globals. RATIO , x : ( this . x + this . _width / 2 ) / Globals. RATIO , y : ( this . y + this . _height / 2 ) / Globals. RATIO , density: 0.48 , driction: 0.3 , restitution: 0.4 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true , skin: null , scaleSkin: true } ) ; this ._frontAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyLeft. body , x1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._frontRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyRight. body , x1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._rearAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyLeft. body , x1: this ._rearAxisBodyLeft. x , y1: this ._rearAxisBodyLeft. y , x2: this ._rearAxisBodyLeft. x , y2: this ._rearAxisBodyLeft. y , enableLimit: true , enableMotor: false , collideConnected: false , lowerAngle: 0 , upperAngle: 0 } ) ; this ._rearRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyRight. body , x1: this ._rearAxisBodyRight. x , y1: this ._rearAxisBodyRight. y , x2: this ._rearAxisBodyRight. x , y2: this ._rearAxisBodyRight. y , enableLimit: true , enableMotor: false , lowerAngle: 0 , upperAngle: 0 } ) ;
// _width = 76 ; _height = 40 ; _maxTurnAngle = 15 * Globals. DEG_TO_RAD ; // _axisOffset: Number = ( _width / 4 - axisWidth ) / Globals. RATIO // _privod = FWD; // , _carBody = world. addBox ( { width : this . _width / 2 / Globals. RATIO , height : this . _height / 2 / Globals. RATIO , x : ( this . x + this . _width / 2 ) / Globals. RATIO , y : ( this . y + this . _height / 2 ) / Globals. RATIO , density: 0.48 , driction: 0.3 , restitution: 0.4 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true , skin: null , scaleSkin: true } ) ; this ._frontAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyLeft. body , x1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._frontRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyRight. body , x1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._rearAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyLeft. body , x1: this ._rearAxisBodyLeft. x , y1: this ._rearAxisBodyLeft. y , x2: this ._rearAxisBodyLeft. x , y2: this ._rearAxisBodyLeft. y , enableLimit: true , enableMotor: false , collideConnected: false , lowerAngle: 0 , upperAngle: 0 } ) ; this ._rearRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyRight. body , x1: this ._rearAxisBodyRight. x , y1: this ._rearAxisBodyRight. y , x2: this ._rearAxisBodyRight. x , y2: this ._rearAxisBodyRight. y , enableLimit: true , enableMotor: false , lowerAngle: 0 , upperAngle: 0 } ) ;
// _width = 76 ; _height = 40 ; _maxTurnAngle = 15 * Globals. DEG_TO_RAD ; // _axisOffset: Number = ( _width / 4 - axisWidth ) / Globals. RATIO // _privod = FWD; // , _carBody = world. addBox ( { width : this . _width / 2 / Globals. RATIO , height : this . _height / 2 / Globals. RATIO , x : ( this . x + this . _width / 2 ) / Globals. RATIO , y : ( this . y + this . _height / 2 ) / Globals. RATIO , density: 0.48 , driction: 0.3 , restitution: 0.4 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true , skin: null , scaleSkin: true } ) ; this ._frontAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyLeft. body , x1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._frontRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyRight. body , x1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._rearAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyLeft. body , x1: this ._rearAxisBodyLeft. x , y1: this ._rearAxisBodyLeft. y , x2: this ._rearAxisBodyLeft. x , y2: this ._rearAxisBodyLeft. y , enableLimit: true , enableMotor: false , collideConnected: false , lowerAngle: 0 , upperAngle: 0 } ) ; this ._rearRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyRight. body , x1: this ._rearAxisBodyRight. x , y1: this ._rearAxisBodyRight. y , x2: this ._rearAxisBodyRight. x , y2: this ._rearAxisBodyRight. y , enableLimit: true , enableMotor: false , lowerAngle: 0 , upperAngle: 0 } ) ;
// _width = 76 ; _height = 40 ; _maxTurnAngle = 15 * Globals. DEG_TO_RAD ; // _axisOffset: Number = ( _width / 4 - axisWidth ) / Globals. RATIO // _privod = FWD; // , _carBody = world. addBox ( { width : this . _width / 2 / Globals. RATIO , height : this . _height / 2 / Globals. RATIO , x : ( this . x + this . _width / 2 ) / Globals. RATIO , y : ( this . y + this . _height / 2 ) / Globals. RATIO , density: 0.48 , driction: 0.3 , restitution: 0.4 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true , skin: null , scaleSkin: true } ) ; this ._frontAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyLeft. body , x1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._frontRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyRight. body , x1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._rearAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyLeft. body , x1: this ._rearAxisBodyLeft. x , y1: this ._rearAxisBodyLeft. y , x2: this ._rearAxisBodyLeft. x , y2: this ._rearAxisBodyLeft. y , enableLimit: true , enableMotor: false , collideConnected: false , lowerAngle: 0 , upperAngle: 0 } ) ; this ._rearRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyRight. body , x1: this ._rearAxisBodyRight. x , y1: this ._rearAxisBodyRight. y , x2: this ._rearAxisBodyRight. x , y2: this ._rearAxisBodyRight. y , enableLimit: true , enableMotor: false , lowerAngle: 0 , upperAngle: 0 } ) ;
// _width = 76 ; _height = 40 ; _maxTurnAngle = 15 * Globals. DEG_TO_RAD ; // _axisOffset: Number = ( _width / 4 - axisWidth ) / Globals. RATIO // _privod = FWD; // , _carBody = world. addBox ( { width : this . _width / 2 / Globals. RATIO , height : this . _height / 2 / Globals. RATIO , x : ( this . x + this . _width / 2 ) / Globals. RATIO , y : ( this . y + this . _height / 2 ) / Globals. RATIO , density: 0.48 , driction: 0.3 , restitution: 0.4 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true , skin: null , scaleSkin: true } ) ; this ._frontAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyLeft. body , x1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._frontRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyRight. body , x1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._rearAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyLeft. body , x1: this ._rearAxisBodyLeft. x , y1: this ._rearAxisBodyLeft. y , x2: this ._rearAxisBodyLeft. x , y2: this ._rearAxisBodyLeft. y , enableLimit: true , enableMotor: false , collideConnected: false , lowerAngle: 0 , upperAngle: 0 } ) ; this ._rearRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyRight. body , x1: this ._rearAxisBodyRight. x , y1: this ._rearAxisBodyRight. y , x2: this ._rearAxisBodyRight. x , y2: this ._rearAxisBodyRight. y , enableLimit: true , enableMotor: false , lowerAngle: 0 , upperAngle: 0 } ) ;
// _width = 76 ; _height = 40 ; _maxTurnAngle = 15 * Globals. DEG_TO_RAD ; // _axisOffset: Number = ( _width / 4 - axisWidth ) / Globals. RATIO // _privod = FWD; // , _carBody = world. addBox ( { width : this . _width / 2 / Globals. RATIO , height : this . _height / 2 / Globals. RATIO , x : ( this . x + this . _width / 2 ) / Globals. RATIO , y : ( this . y + this . _height / 2 ) / Globals. RATIO , density: 0.48 , driction: 0.3 , restitution: 0.4 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true , skin: null , scaleSkin: true } ) ; this ._frontAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyLeft. body , x1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._frontRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyRight. body , x1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._rearAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyLeft. body , x1: this ._rearAxisBodyLeft. x , y1: this ._rearAxisBodyLeft. y , x2: this ._rearAxisBodyLeft. x , y2: this ._rearAxisBodyLeft. y , enableLimit: true , enableMotor: false , collideConnected: false , lowerAngle: 0 , upperAngle: 0 } ) ; this ._rearRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyRight. body , x1: this ._rearAxisBodyRight. x , y1: this ._rearAxisBodyRight. y , x2: this ._rearAxisBodyRight. x , y2: this ._rearAxisBodyRight. y , enableLimit: true , enableMotor: false , lowerAngle: 0 , upperAngle: 0 } ) ;
// _width = 76 ; _height = 40 ; _maxTurnAngle = 15 * Globals. DEG_TO_RAD ; // _axisOffset: Number = ( _width / 4 - axisWidth ) / Globals. RATIO // _privod = FWD; // , _carBody = world. addBox ( { width : this . _width / 2 / Globals. RATIO , height : this . _height / 2 / Globals. RATIO , x : ( this . x + this . _width / 2 ) / Globals. RATIO , y : ( this . y + this . _height / 2 ) / Globals. RATIO , density: 0.48 , driction: 0.3 , restitution: 0.4 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true , skin: null , scaleSkin: true } ) ; this ._frontAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyLeft. body , x1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._frontRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyRight. body , x1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._rearAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyLeft. body , x1: this ._rearAxisBodyLeft. x , y1: this ._rearAxisBodyLeft. y , x2: this ._rearAxisBodyLeft. x , y2: this ._rearAxisBodyLeft. y , enableLimit: true , enableMotor: false , collideConnected: false , lowerAngle: 0 , upperAngle: 0 } ) ; this ._rearRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyRight. body , x1: this ._rearAxisBodyRight. x , y1: this ._rearAxisBodyRight. y , x2: this ._rearAxisBodyRight. x , y2: this ._rearAxisBodyRight. y , enableLimit: true , enableMotor: false , lowerAngle: 0 , upperAngle: 0 } ) ;
// _width = 76 ; _height = 40 ; _maxTurnAngle = 15 * Globals. DEG_TO_RAD ; // _axisOffset: Number = ( _width / 4 - axisWidth ) / Globals. RATIO // _privod = FWD; // , _carBody = world. addBox ( { width : this . _width / 2 / Globals. RATIO , height : this . _height / 2 / Globals. RATIO , x : ( this . x + this . _width / 2 ) / Globals. RATIO , y : ( this . y + this . _height / 2 ) / Globals. RATIO , density: 0.48 , driction: 0.3 , restitution: 0.4 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true , skin: null , scaleSkin: true } ) ; this ._frontAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyLeft. body , x1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._frontRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyRight. body , x1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._rearAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyLeft. body , x1: this ._rearAxisBodyLeft. x , y1: this ._rearAxisBodyLeft. y , x2: this ._rearAxisBodyLeft. x , y2: this ._rearAxisBodyLeft. y , enableLimit: true , enableMotor: false , collideConnected: false , lowerAngle: 0 , upperAngle: 0 } ) ; this ._rearRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyRight. body , x1: this ._rearAxisBodyRight. x , y1: this ._rearAxisBodyRight. y , x2: this ._rearAxisBodyRight. x , y2: this ._rearAxisBodyRight. y , enableLimit: true , enableMotor: false , lowerAngle: 0 , upperAngle: 0 } ) ;
// _width = 76 ; _height = 40 ; _maxTurnAngle = 15 * Globals. DEG_TO_RAD ; // _axisOffset: Number = ( _width / 4 - axisWidth ) / Globals. RATIO // _privod = FWD; // , _carBody = world. addBox ( { width : this . _width / 2 / Globals. RATIO , height : this . _height / 2 / Globals. RATIO , x : ( this . x + this . _width / 2 ) / Globals. RATIO , y : ( this . y + this . _height / 2 ) / Globals. RATIO , density: 0.48 , driction: 0.3 , restitution: 0.4 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true , skin: null , scaleSkin: true } ) ; this ._frontAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyLeft. body , x1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._frontRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyRight. body , x1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._rearAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyLeft. body , x1: this ._rearAxisBodyLeft. x , y1: this ._rearAxisBodyLeft. y , x2: this ._rearAxisBodyLeft. x , y2: this ._rearAxisBodyLeft. y , enableLimit: true , enableMotor: false , collideConnected: false , lowerAngle: 0 , upperAngle: 0 } ) ; this ._rearRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyRight. body , x1: this ._rearAxisBodyRight. x , y1: this ._rearAxisBodyRight. y , x2: this ._rearAxisBodyRight. x , y2: this ._rearAxisBodyRight. y , enableLimit: true , enableMotor: false , lowerAngle: 0 , upperAngle: 0 } ) ;
// _width = 76 ; _height = 40 ; _maxTurnAngle = 15 * Globals. DEG_TO_RAD ; // _axisOffset: Number = ( _width / 4 - axisWidth ) / Globals. RATIO // _privod = FWD; // , _carBody = world. addBox ( { width : this . _width / 2 / Globals. RATIO , height : this . _height / 2 / Globals. RATIO , x : ( this . x + this . _width / 2 ) / Globals. RATIO , y : ( this . y + this . _height / 2 ) / Globals. RATIO , density: 0.48 , driction: 0.3 , restitution: 0.4 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true , skin: null , scaleSkin: true } ) ; this ._frontAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyLeft. body , x1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._frontRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyRight. body , x1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._rearAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyLeft. body , x1: this ._rearAxisBodyLeft. x , y1: this ._rearAxisBodyLeft. y , x2: this ._rearAxisBodyLeft. x , y2: this ._rearAxisBodyLeft. y , enableLimit: true , enableMotor: false , collideConnected: false , lowerAngle: 0 , upperAngle: 0 } ) ; this ._rearRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyRight. body , x1: this ._rearAxisBodyRight. x , y1: this ._rearAxisBodyRight. y , x2: this ._rearAxisBodyRight. x , y2: this ._rearAxisBodyRight. y , enableLimit: true , enableMotor: false , lowerAngle: 0 , upperAngle: 0 } ) ;
// _width = 76 ; _height = 40 ; _maxTurnAngle = 15 * Globals. DEG_TO_RAD ; // _axisOffset: Number = ( _width / 4 - axisWidth ) / Globals. RATIO // _privod = FWD; // , _carBody = world. addBox ( { width : this . _width / 2 / Globals. RATIO , height : this . _height / 2 / Globals. RATIO , x : ( this . x + this . _width / 2 ) / Globals. RATIO , y : ( this . y + this . _height / 2 ) / Globals. RATIO , density: 0.48 , driction: 0.3 , restitution: 0.4 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true , skin: null , scaleSkin: true } ) ; this ._frontAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyLeft. body , x1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._frontRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyRight. body , x1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._rearAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyLeft. body , x1: this ._rearAxisBodyLeft. x , y1: this ._rearAxisBodyLeft. y , x2: this ._rearAxisBodyLeft. x , y2: this ._rearAxisBodyLeft. y , enableLimit: true , enableMotor: false , collideConnected: false , lowerAngle: 0 , upperAngle: 0 } ) ; this ._rearRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyRight. body , x1: this ._rearAxisBodyRight. x , y1: this ._rearAxisBodyRight. y , x2: this ._rearAxisBodyRight. x , y2: this ._rearAxisBodyRight. y , enableLimit: true , enableMotor: false , lowerAngle: 0 , upperAngle: 0 } ) ;
// _width = 76 ; _height = 40 ; _maxTurnAngle = 15 * Globals. DEG_TO_RAD ; // _axisOffset: Number = ( _width / 4 - axisWidth ) / Globals. RATIO // _privod = FWD; // , _carBody = world. addBox ( { width : this . _width / 2 / Globals. RATIO , height : this . _height / 2 / Globals. RATIO , x : ( this . x + this . _width / 2 ) / Globals. RATIO , y : ( this . y + this . _height / 2 ) / Globals. RATIO , density: 0.48 , driction: 0.3 , restitution: 0.4 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true , skin: null , scaleSkin: true } ) ; this ._frontAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyLeft. body , x1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._frontRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyRight. body , x1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._rearAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyLeft. body , x1: this ._rearAxisBodyLeft. x , y1: this ._rearAxisBodyLeft. y , x2: this ._rearAxisBodyLeft. x , y2: this ._rearAxisBodyLeft. y , enableLimit: true , enableMotor: false , collideConnected: false , lowerAngle: 0 , upperAngle: 0 } ) ; this ._rearRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyRight. body , x1: this ._rearAxisBodyRight. x , y1: this ._rearAxisBodyRight. y , x2: this ._rearAxisBodyRight. x , y2: this ._rearAxisBodyRight. y , enableLimit: true , enableMotor: false , lowerAngle: 0 , upperAngle: 0 } ) ;
// _width = 76 ; _height = 40 ; _maxTurnAngle = 15 * Globals. DEG_TO_RAD ; // _axisOffset: Number = ( _width / 4 - axisWidth ) / Globals. RATIO // _privod = FWD; // , _carBody = world. addBox ( { width : this . _width / 2 / Globals. RATIO , height : this . _height / 2 / Globals. RATIO , x : ( this . x + this . _width / 2 ) / Globals. RATIO , y : ( this . y + this . _height / 2 ) / Globals. RATIO , density: 0.48 , driction: 0.3 , restitution: 0.4 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true , skin: null , scaleSkin: true } ) ; this ._frontAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyLeft. body , x1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._frontRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyRight. body , x1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._rearAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyLeft. body , x1: this ._rearAxisBodyLeft. x , y1: this ._rearAxisBodyLeft. y , x2: this ._rearAxisBodyLeft. x , y2: this ._rearAxisBodyLeft. y , enableLimit: true , enableMotor: false , collideConnected: false , lowerAngle: 0 , upperAngle: 0 } ) ; this ._rearRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyRight. body , x1: this ._rearAxisBodyRight. x , y1: this ._rearAxisBodyRight. y , x2: this ._rearAxisBodyRight. x , y2: this ._rearAxisBodyRight. y , enableLimit: true , enableMotor: false , lowerAngle: 0 , upperAngle: 0 } ) ;
// _width = 76 ; _height = 40 ; _maxTurnAngle = 15 * Globals. DEG_TO_RAD ; // _axisOffset: Number = ( _width / 4 - axisWidth ) / Globals. RATIO // _privod = FWD; // , _carBody = world. addBox ( { width : this . _width / 2 / Globals. RATIO , height : this . _height / 2 / Globals. RATIO , x : ( this . x + this . _width / 2 ) / Globals. RATIO , y : ( this . y + this . _height / 2 ) / Globals. RATIO , density: 0.48 , driction: 0.3 , restitution: 0.4 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true , skin: null , scaleSkin: true } ) ; this ._frontAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyLeft. body , x1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._frontRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyRight. body , x1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._rearAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyLeft. body , x1: this ._rearAxisBodyLeft. x , y1: this ._rearAxisBodyLeft. y , x2: this ._rearAxisBodyLeft. x , y2: this ._rearAxisBodyLeft. y , enableLimit: true , enableMotor: false , collideConnected: false , lowerAngle: 0 , upperAngle: 0 } ) ; this ._rearRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyRight. body , x1: this ._rearAxisBodyRight. x , y1: this ._rearAxisBodyRight. y , x2: this ._rearAxisBodyRight. x , y2: this ._rearAxisBodyRight. y , enableLimit: true , enableMotor: false , lowerAngle: 0 , upperAngle: 0 } ) ;
// _width = 76 ; _height = 40 ; _maxTurnAngle = 15 * Globals. DEG_TO_RAD ; // _axisOffset: Number = ( _width / 4 - axisWidth ) / Globals. RATIO // _privod = FWD; // , _carBody = world. addBox ( { width : this . _width / 2 / Globals. RATIO , height : this . _height / 2 / Globals. RATIO , x : ( this . x + this . _width / 2 ) / Globals. RATIO , y : ( this . y + this . _height / 2 ) / Globals. RATIO , density: 0.48 , driction: 0.3 , restitution: 0.4 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true , skin: null , scaleSkin: true } ) ; this ._frontAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyLeft. body , x1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._frontRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyRight. body , x1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._rearAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyLeft. body , x1: this ._rearAxisBodyLeft. x , y1: this ._rearAxisBodyLeft. y , x2: this ._rearAxisBodyLeft. x , y2: this ._rearAxisBodyLeft. y , enableLimit: true , enableMotor: false , collideConnected: false , lowerAngle: 0 , upperAngle: 0 } ) ; this ._rearRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyRight. body , x1: this ._rearAxisBodyRight. x , y1: this ._rearAxisBodyRight. y , x2: this ._rearAxisBodyRight. x , y2: this ._rearAxisBodyRight. y , enableLimit: true , enableMotor: false , lowerAngle: 0 , upperAngle: 0 } ) ;
// _width = 76 ; _height = 40 ; _maxTurnAngle = 15 * Globals. DEG_TO_RAD ; // _axisOffset: Number = ( _width / 4 - axisWidth ) / Globals. RATIO // _privod = FWD; // , _carBody = world. addBox ( { width : this . _width / 2 / Globals. RATIO , height : this . _height / 2 / Globals. RATIO , x : ( this . x + this . _width / 2 ) / Globals. RATIO , y : ( this . y + this . _height / 2 ) / Globals. RATIO , density: 0.48 , driction: 0.3 , restitution: 0.4 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true , skin: null , scaleSkin: true } ) ; this ._frontAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyLeft. body , x1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._frontRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyRight. body , x1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._rearAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyLeft. body , x1: this ._rearAxisBodyLeft. x , y1: this ._rearAxisBodyLeft. y , x2: this ._rearAxisBodyLeft. x , y2: this ._rearAxisBodyLeft. y , enableLimit: true , enableMotor: false , collideConnected: false , lowerAngle: 0 , upperAngle: 0 } ) ; this ._rearRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyRight. body , x1: this ._rearAxisBodyRight. x , y1: this ._rearAxisBodyRight. y , x2: this ._rearAxisBodyRight. x , y2: this ._rearAxisBodyRight. y , enableLimit: true , enableMotor: false , lowerAngle: 0 , upperAngle: 0 } ) ;
// _width = 76 ; _height = 40 ; _maxTurnAngle = 15 * Globals. DEG_TO_RAD ; // _axisOffset: Number = ( _width / 4 - axisWidth ) / Globals. RATIO // _privod = FWD; // , _carBody = world. addBox ( { width : this . _width / 2 / Globals. RATIO , height : this . _height / 2 / Globals. RATIO , x : ( this . x + this . _width / 2 ) / Globals. RATIO , y : ( this . y + this . _height / 2 ) / Globals. RATIO , density: 0.48 , driction: 0.3 , restitution: 0.4 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true , skin: null , scaleSkin: true } ) ; this ._frontAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyLeft. body , x1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._frontRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyRight. body , x1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._rearAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyLeft. body , x1: this ._rearAxisBodyLeft. x , y1: this ._rearAxisBodyLeft. y , x2: this ._rearAxisBodyLeft. x , y2: this ._rearAxisBodyLeft. y , enableLimit: true , enableMotor: false , collideConnected: false , lowerAngle: 0 , upperAngle: 0 } ) ; this ._rearRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyRight. body , x1: this ._rearAxisBodyRight. x , y1: this ._rearAxisBodyRight. y , x2: this ._rearAxisBodyRight. x , y2: this ._rearAxisBodyRight. y , enableLimit: true , enableMotor: false , lowerAngle: 0 , upperAngle: 0 } ) ;
// _width = 76 ; _height = 40 ; _maxTurnAngle = 15 * Globals. DEG_TO_RAD ; // _axisOffset: Number = ( _width / 4 - axisWidth ) / Globals. RATIO // _privod = FWD; // , _carBody = world. addBox ( { width : this . _width / 2 / Globals. RATIO , height : this . _height / 2 / Globals. RATIO , x : ( this . x + this . _width / 2 ) / Globals. RATIO , y : ( this . y + this . _height / 2 ) / Globals. RATIO , density: 0.48 , driction: 0.3 , restitution: 0.4 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true , skin: null , scaleSkin: true } ) ; this ._frontAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyLeft. body , x1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._frontRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyRight. body , x1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._rearAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyLeft. body , x1: this ._rearAxisBodyLeft. x , y1: this ._rearAxisBodyLeft. y , x2: this ._rearAxisBodyLeft. x , y2: this ._rearAxisBodyLeft. y , enableLimit: true , enableMotor: false , collideConnected: false , lowerAngle: 0 , upperAngle: 0 } ) ; this ._rearRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyRight. body , x1: this ._rearAxisBodyRight. x , y1: this ._rearAxisBodyRight. y , x2: this ._rearAxisBodyRight. x , y2: this ._rearAxisBodyRight. y , enableLimit: true , enableMotor: false , lowerAngle: 0 , upperAngle: 0 } ) ;
// _width = 76 ; _height = 40 ; _maxTurnAngle = 15 * Globals. DEG_TO_RAD ; // _axisOffset: Number = ( _width / 4 - axisWidth ) / Globals. RATIO // _privod = FWD; // , _carBody = world. addBox ( { width : this . _width / 2 / Globals. RATIO , height : this . _height / 2 / Globals. RATIO , x : ( this . x + this . _width / 2 ) / Globals. RATIO , y : ( this . y + this . _height / 2 ) / Globals. RATIO , density: 0.48 , driction: 0.3 , restitution: 0.4 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true , skin: null , scaleSkin: true } ) ; this ._frontAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyLeft. body , x1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._frontRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyRight. body , x1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._rearAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyLeft. body , x1: this ._rearAxisBodyLeft. x , y1: this ._rearAxisBodyLeft. y , x2: this ._rearAxisBodyLeft. x , y2: this ._rearAxisBodyLeft. y , enableLimit: true , enableMotor: false , collideConnected: false , lowerAngle: 0 , upperAngle: 0 } ) ; this ._rearRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyRight. body , x1: this ._rearAxisBodyRight. x , y1: this ._rearAxisBodyRight. y , x2: this ._rearAxisBodyRight. x , y2: this ._rearAxisBodyRight. y , enableLimit: true , enableMotor: false , lowerAngle: 0 , upperAngle: 0 } ) ;
// _width = 76 ; _height = 40 ; _maxTurnAngle = 15 * Globals. DEG_TO_RAD ; // _axisOffset: Number = ( _width / 4 - axisWidth ) / Globals. RATIO // _privod = FWD; // , _carBody = world. addBox ( { width : this . _width / 2 / Globals. RATIO , height : this . _height / 2 / Globals. RATIO , x : ( this . x + this . _width / 2 ) / Globals. RATIO , y : ( this . y + this . _height / 2 ) / Globals. RATIO , density: 0.48 , driction: 0.3 , restitution: 0.4 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true , skin: null , scaleSkin: true } ) ; this ._frontAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyLeft. body , x1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._frontRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyRight. body , x1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._rearAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyLeft. body , x1: this ._rearAxisBodyLeft. x , y1: this ._rearAxisBodyLeft. y , x2: this ._rearAxisBodyLeft. x , y2: this ._rearAxisBodyLeft. y , enableLimit: true , enableMotor: false , collideConnected: false , lowerAngle: 0 , upperAngle: 0 } ) ; this ._rearRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyRight. body , x1: this ._rearAxisBodyRight. x , y1: this ._rearAxisBodyRight. y , x2: this ._rearAxisBodyRight. x , y2: this ._rearAxisBodyRight. y , enableLimit: true , enableMotor: false , lowerAngle: 0 , upperAngle: 0 } ) ;
// _width = 76 ; _height = 40 ; _maxTurnAngle = 15 * Globals. DEG_TO_RAD ; // _axisOffset: Number = ( _width / 4 - axisWidth ) / Globals. RATIO // _privod = FWD; // , _carBody = world. addBox ( { width : this . _width / 2 / Globals. RATIO , height : this . _height / 2 / Globals. RATIO , x : ( this . x + this . _width / 2 ) / Globals. RATIO , y : ( this . y + this . _height / 2 ) / Globals. RATIO , density: 0.48 , driction: 0.3 , restitution: 0.4 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true , skin: null , scaleSkin: true } ) ; this ._frontAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyLeft. body , x1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._frontRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyRight. body , x1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._rearAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyLeft. body , x1: this ._rearAxisBodyLeft. x , y1: this ._rearAxisBodyLeft. y , x2: this ._rearAxisBodyLeft. x , y2: this ._rearAxisBodyLeft. y , enableLimit: true , enableMotor: false , collideConnected: false , lowerAngle: 0 , upperAngle: 0 } ) ; this ._rearRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyRight. body , x1: this ._rearAxisBodyRight. x , y1: this ._rearAxisBodyRight. y , x2: this ._rearAxisBodyRight. x , y2: this ._rearAxisBodyRight. y , enableLimit: true , enableMotor: false , lowerAngle: 0 , upperAngle: 0 } ) ;
// _width = 76 ; _height = 40 ; _maxTurnAngle = 15 * Globals. DEG_TO_RAD ; // _axisOffset: Number = ( _width / 4 - axisWidth ) / Globals. RATIO // _privod = FWD; // , _carBody = world. addBox ( { width : this . _width / 2 / Globals. RATIO , height : this . _height / 2 / Globals. RATIO , x : ( this . x + this . _width / 2 ) / Globals. RATIO , y : ( this . y + this . _height / 2 ) / Globals. RATIO , density: 0.48 , driction: 0.3 , restitution: 0.4 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true , skin: null , scaleSkin: true } ) ; this ._frontAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyLeft. body , x1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._frontRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyRight. body , x1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._rearAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyLeft. body , x1: this ._rearAxisBodyLeft. x , y1: this ._rearAxisBodyLeft. y , x2: this ._rearAxisBodyLeft. x , y2: this ._rearAxisBodyLeft. y , enableLimit: true , enableMotor: false , collideConnected: false , lowerAngle: 0 , upperAngle: 0 } ) ; this ._rearRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyRight. body , x1: this ._rearAxisBodyRight. x , y1: this ._rearAxisBodyRight. y , x2: this ._rearAxisBodyRight. x , y2: this ._rearAxisBodyRight. y , enableLimit: true , enableMotor: false , lowerAngle: 0 , upperAngle: 0 } ) ;
// _width = 76 ; _height = 40 ; _maxTurnAngle = 15 * Globals. DEG_TO_RAD ; // _axisOffset: Number = ( _width / 4 - axisWidth ) / Globals. RATIO // _privod = FWD; // , _carBody = world. addBox ( { width : this . _width / 2 / Globals. RATIO , height : this . _height / 2 / Globals. RATIO , x : ( this . x + this . _width / 2 ) / Globals. RATIO , y : ( this . y + this . _height / 2 ) / Globals. RATIO , density: 0.48 , driction: 0.3 , restitution: 0.4 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true , skin: null , scaleSkin: true } ) ; this ._frontAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyLeft. body , x1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._frontRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyRight. body , x1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._rearAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyLeft. body , x1: this ._rearAxisBodyLeft. x , y1: this ._rearAxisBodyLeft. y , x2: this ._rearAxisBodyLeft. x , y2: this ._rearAxisBodyLeft. y , enableLimit: true , enableMotor: false , collideConnected: false , lowerAngle: 0 , upperAngle: 0 } ) ; this ._rearRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyRight. body , x1: this ._rearAxisBodyRight. x , y1: this ._rearAxisBodyRight. y , x2: this ._rearAxisBodyRight. x , y2: this ._rearAxisBodyRight. y , enableLimit: true , enableMotor: false , lowerAngle: 0 , upperAngle: 0 } ) ;
// _width = 76 ; _height = 40 ; _maxTurnAngle = 15 * Globals. DEG_TO_RAD ; // _axisOffset: Number = ( _width / 4 - axisWidth ) / Globals. RATIO // _privod = FWD; // , _carBody = world. addBox ( { width : this . _width / 2 / Globals. RATIO , height : this . _height / 2 / Globals. RATIO , x : ( this . x + this . _width / 2 ) / Globals. RATIO , y : ( this . y + this . _height / 2 ) / Globals. RATIO , density: 0.48 , driction: 0.3 , restitution: 0.4 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true , skin: null , scaleSkin: true } ) ; this ._frontAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyLeft. body , x1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._frontRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyRight. body , x1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._rearAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyLeft. body , x1: this ._rearAxisBodyLeft. x , y1: this ._rearAxisBodyLeft. y , x2: this ._rearAxisBodyLeft. x , y2: this ._rearAxisBodyLeft. y , enableLimit: true , enableMotor: false , collideConnected: false , lowerAngle: 0 , upperAngle: 0 } ) ; this ._rearRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyRight. body , x1: this ._rearAxisBodyRight. x , y1: this ._rearAxisBodyRight. y , x2: this ._rearAxisBodyRight. x , y2: this ._rearAxisBodyRight. y , enableLimit: true , enableMotor: false , lowerAngle: 0 , upperAngle: 0 } ) ;
// _width = 76 ; _height = 40 ; _maxTurnAngle = 15 * Globals. DEG_TO_RAD ; // _axisOffset: Number = ( _width / 4 - axisWidth ) / Globals. RATIO // _privod = FWD; // , _carBody = world. addBox ( { width : this . _width / 2 / Globals. RATIO , height : this . _height / 2 / Globals. RATIO , x : ( this . x + this . _width / 2 ) / Globals. RATIO , y : ( this . y + this . _height / 2 ) / Globals. RATIO , density: 0.48 , driction: 0.3 , restitution: 0.4 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true , skin: null , scaleSkin: true } ) ; this ._frontAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyLeft. body , x1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._frontRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyRight. body , x1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._rearAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyLeft. body , x1: this ._rearAxisBodyLeft. x , y1: this ._rearAxisBodyLeft. y , x2: this ._rearAxisBodyLeft. x , y2: this ._rearAxisBodyLeft. y , enableLimit: true , enableMotor: false , collideConnected: false , lowerAngle: 0 , upperAngle: 0 } ) ; this ._rearRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyRight. body , x1: this ._rearAxisBodyRight. x , y1: this ._rearAxisBodyRight. y , x2: this ._rearAxisBodyRight. x , y2: this ._rearAxisBodyRight. y , enableLimit: true , enableMotor: false , lowerAngle: 0 , upperAngle: 0 } ) ;
// _width = 76 ; _height = 40 ; _maxTurnAngle = 15 * Globals. DEG_TO_RAD ; // _axisOffset: Number = ( _width / 4 - axisWidth ) / Globals. RATIO // _privod = FWD; // , _carBody = world. addBox ( { width : this . _width / 2 / Globals. RATIO , height : this . _height / 2 / Globals. RATIO , x : ( this . x + this . _width / 2 ) / Globals. RATIO , y : ( this . y + this . _height / 2 ) / Globals. RATIO , density: 0.48 , driction: 0.3 , restitution: 0.4 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true , skin: null , scaleSkin: true } ) ; this ._frontAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyLeft. body , x1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._frontRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyRight. body , x1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._rearAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyLeft. body , x1: this ._rearAxisBodyLeft. x , y1: this ._rearAxisBodyLeft. y , x2: this ._rearAxisBodyLeft. x , y2: this ._rearAxisBodyLeft. y , enableLimit: true , enableMotor: false , collideConnected: false , lowerAngle: 0 , upperAngle: 0 } ) ; this ._rearRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyRight. body , x1: this ._rearAxisBodyRight. x , y1: this ._rearAxisBodyRight. y , x2: this ._rearAxisBodyRight. x , y2: this ._rearAxisBodyRight. y , enableLimit: true , enableMotor: false , lowerAngle: 0 , upperAngle: 0 } ) ;
// _width = 76 ; _height = 40 ; _maxTurnAngle = 15 * Globals. DEG_TO_RAD ; // _axisOffset: Number = ( _width / 4 - axisWidth ) / Globals. RATIO // _privod = FWD; // , _carBody = world. addBox ( { width : this . _width / 2 / Globals. RATIO , height : this . _height / 2 / Globals. RATIO , x : ( this . x + this . _width / 2 ) / Globals. RATIO , y : ( this . y + this . _height / 2 ) / Globals. RATIO , density: 0.48 , driction: 0.3 , restitution: 0.4 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true , skin: null , scaleSkin: true } ) ; this ._frontAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyLeft. body , x1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._frontRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyRight. body , x1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._rearAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyLeft. body , x1: this ._rearAxisBodyLeft. x , y1: this ._rearAxisBodyLeft. y , x2: this ._rearAxisBodyLeft. x , y2: this ._rearAxisBodyLeft. y , enableLimit: true , enableMotor: false , collideConnected: false , lowerAngle: 0 , upperAngle: 0 } ) ; this ._rearRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyRight. body , x1: this ._rearAxisBodyRight. x , y1: this ._rearAxisBodyRight. y , x2: this ._rearAxisBodyRight. x , y2: this ._rearAxisBodyRight. y , enableLimit: true , enableMotor: false , lowerAngle: 0 , upperAngle: 0 } ) ;
// _width = 76 ; _height = 40 ; _maxTurnAngle = 15 * Globals. DEG_TO_RAD ; // _axisOffset: Number = ( _width / 4 - axisWidth ) / Globals. RATIO // _privod = FWD; // , _carBody = world. addBox ( { width : this . _width / 2 / Globals. RATIO , height : this . _height / 2 / Globals. RATIO , x : ( this . x + this . _width / 2 ) / Globals. RATIO , y : ( this . y + this . _height / 2 ) / Globals. RATIO , density: 0.48 , driction: 0.3 , restitution: 0.4 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true , skin: null , scaleSkin: true } ) ; this ._frontAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyLeft. body , x1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._frontRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyRight. body , x1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._rearAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyLeft. body , x1: this ._rearAxisBodyLeft. x , y1: this ._rearAxisBodyLeft. y , x2: this ._rearAxisBodyLeft. x , y2: this ._rearAxisBodyLeft. y , enableLimit: true , enableMotor: false , collideConnected: false , lowerAngle: 0 , upperAngle: 0 } ) ; this ._rearRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyRight. body , x1: this ._rearAxisBodyRight. x , y1: this ._rearAxisBodyRight. y , x2: this ._rearAxisBodyRight. x , y2: this ._rearAxisBodyRight. y , enableLimit: true , enableMotor: false , lowerAngle: 0 , upperAngle: 0 } ) ;
// _width = 76 ; _height = 40 ; _maxTurnAngle = 15 * Globals. DEG_TO_RAD ; // _axisOffset: Number = ( _width / 4 - axisWidth ) / Globals. RATIO // _privod = FWD; // , _carBody = world. addBox ( { width : this . _width / 2 / Globals. RATIO , height : this . _height / 2 / Globals. RATIO , x : ( this . x + this . _width / 2 ) / Globals. RATIO , y : ( this . y + this . _height / 2 ) / Globals. RATIO , density: 0.48 , driction: 0.3 , restitution: 0.4 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true , skin: null , scaleSkin: true } ) ; this ._frontAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyLeft. body , x1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._frontRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyRight. body , x1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._rearAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyLeft. body , x1: this ._rearAxisBodyLeft. x , y1: this ._rearAxisBodyLeft. y , x2: this ._rearAxisBodyLeft. x , y2: this ._rearAxisBodyLeft. y , enableLimit: true , enableMotor: false , collideConnected: false , lowerAngle: 0 , upperAngle: 0 } ) ; this ._rearRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyRight. body , x1: this ._rearAxisBodyRight. x , y1: this ._rearAxisBodyRight. y , x2: this ._rearAxisBodyRight. x , y2: this ._rearAxisBodyRight. y , enableLimit: true , enableMotor: false , lowerAngle: 0 , upperAngle: 0 } ) ;
// _width = 76 ; _height = 40 ; _maxTurnAngle = 15 * Globals. DEG_TO_RAD ; // _axisOffset: Number = ( _width / 4 - axisWidth ) / Globals. RATIO // _privod = FWD; // , _carBody = world. addBox ( { width : this . _width / 2 / Globals. RATIO , height : this . _height / 2 / Globals. RATIO , x : ( this . x + this . _width / 2 ) / Globals. RATIO , y : ( this . y + this . _height / 2 ) / Globals. RATIO , density: 0.48 , driction: 0.3 , restitution: 0.4 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true , skin: null , scaleSkin: true } ) ; this ._frontAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyLeft. body , x1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._frontRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyRight. body , x1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._rearAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyLeft. body , x1: this ._rearAxisBodyLeft. x , y1: this ._rearAxisBodyLeft. y , x2: this ._rearAxisBodyLeft. x , y2: this ._rearAxisBodyLeft. y , enableLimit: true , enableMotor: false , collideConnected: false , lowerAngle: 0 , upperAngle: 0 } ) ; this ._rearRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyRight. body , x1: this ._rearAxisBodyRight. x , y1: this ._rearAxisBodyRight. y , x2: this ._rearAxisBodyRight. x , y2: this ._rearAxisBodyRight. y , enableLimit: true , enableMotor: false , lowerAngle: 0 , upperAngle: 0 } ) ;
// _width = 76 ; _height = 40 ; _maxTurnAngle = 15 * Globals. DEG_TO_RAD ; // _axisOffset: Number = ( _width / 4 - axisWidth ) / Globals. RATIO // _privod = FWD; // , _carBody = world. addBox ( { width : this . _width / 2 / Globals. RATIO , height : this . _height / 2 / Globals. RATIO , x : ( this . x + this . _width / 2 ) / Globals. RATIO , y : ( this . y + this . _height / 2 ) / Globals. RATIO , density: 0.48 , driction: 0.3 , restitution: 0.4 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true , skin: null , scaleSkin: true } ) ; this ._frontAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyLeft. body , x1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._frontRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyRight. body , x1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._rearAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyLeft. body , x1: this ._rearAxisBodyLeft. x , y1: this ._rearAxisBodyLeft. y , x2: this ._rearAxisBodyLeft. x , y2: this ._rearAxisBodyLeft. y , enableLimit: true , enableMotor: false , collideConnected: false , lowerAngle: 0 , upperAngle: 0 } ) ; this ._rearRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyRight. body , x1: this ._rearAxisBodyRight. x , y1: this ._rearAxisBodyRight. y , x2: this ._rearAxisBodyRight. x , y2: this ._rearAxisBodyRight. y , enableLimit: true , enableMotor: false , lowerAngle: 0 , upperAngle: 0 } ) ;
// _width = 76 ; _height = 40 ; _maxTurnAngle = 15 * Globals. DEG_TO_RAD ; // _axisOffset: Number = ( _width / 4 - axisWidth ) / Globals. RATIO // _privod = FWD; // , _carBody = world. addBox ( { width : this . _width / 2 / Globals. RATIO , height : this . _height / 2 / Globals. RATIO , x : ( this . x + this . _width / 2 ) / Globals. RATIO , y : ( this . y + this . _height / 2 ) / Globals. RATIO , density: 0.48 , driction: 0.3 , restitution: 0.4 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true , skin: null , scaleSkin: true } ) ; this ._frontAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyLeft. body , x1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._frontRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyRight. body , x1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._rearAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyLeft. body , x1: this ._rearAxisBodyLeft. x , y1: this ._rearAxisBodyLeft. y , x2: this ._rearAxisBodyLeft. x , y2: this ._rearAxisBodyLeft. y , enableLimit: true , enableMotor: false , collideConnected: false , lowerAngle: 0 , upperAngle: 0 } ) ; this ._rearRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyRight. body , x1: this ._rearAxisBodyRight. x , y1: this ._rearAxisBodyRight. y , x2: this ._rearAxisBodyRight. x , y2: this ._rearAxisBodyRight. y , enableLimit: true , enableMotor: false , lowerAngle: 0 , upperAngle: 0 } ) ;
// _width = 76 ; _height = 40 ; _maxTurnAngle = 15 * Globals. DEG_TO_RAD ; // _axisOffset: Number = ( _width / 4 - axisWidth ) / Globals. RATIO // _privod = FWD; // , _carBody = world. addBox ( { width : this . _width / 2 / Globals. RATIO , height : this . _height / 2 / Globals. RATIO , x : ( this . x + this . _width / 2 ) / Globals. RATIO , y : ( this . y + this . _height / 2 ) / Globals. RATIO , density: 0.48 , driction: 0.3 , restitution: 0.4 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true , skin: null , scaleSkin: true } ) ; this ._frontAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyLeft. body , x1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._frontRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyRight. body , x1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._rearAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyLeft. body , x1: this ._rearAxisBodyLeft. x , y1: this ._rearAxisBodyLeft. y , x2: this ._rearAxisBodyLeft. x , y2: this ._rearAxisBodyLeft. y , enableLimit: true , enableMotor: false , collideConnected: false , lowerAngle: 0 , upperAngle: 0 } ) ; this ._rearRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyRight. body , x1: this ._rearAxisBodyRight. x , y1: this ._rearAxisBodyRight. y , x2: this ._rearAxisBodyRight. x , y2: this ._rearAxisBodyRight. y , enableLimit: true , enableMotor: false , lowerAngle: 0 , upperAngle: 0 } ) ;
// _width = 76 ; _height = 40 ; _maxTurnAngle = 15 * Globals. DEG_TO_RAD ; // _axisOffset: Number = ( _width / 4 - axisWidth ) / Globals. RATIO // _privod = FWD; // , _carBody = world. addBox ( { width : this . _width / 2 / Globals. RATIO , height : this . _height / 2 / Globals. RATIO , x : ( this . x + this . _width / 2 ) / Globals. RATIO , y : ( this . y + this . _height / 2 ) / Globals. RATIO , density: 0.48 , driction: 0.3 , restitution: 0.4 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true , skin: null , scaleSkin: true } ) ; this ._frontAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyLeft. body , x1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._frontRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyRight. body , x1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._rearAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyLeft. body , x1: this ._rearAxisBodyLeft. x , y1: this ._rearAxisBodyLeft. y , x2: this ._rearAxisBodyLeft. x , y2: this ._rearAxisBodyLeft. y , enableLimit: true , enableMotor: false , collideConnected: false , lowerAngle: 0 , upperAngle: 0 } ) ; this ._rearRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyRight. body , x1: this ._rearAxisBodyRight. x , y1: this ._rearAxisBodyRight. y , x2: this ._rearAxisBodyRight. x , y2: this ._rearAxisBodyRight. y , enableLimit: true , enableMotor: false , lowerAngle: 0 , upperAngle: 0 } ) ;
// _width = 76 ; _height = 40 ; _maxTurnAngle = 15 * Globals. DEG_TO_RAD ; // _axisOffset: Number = ( _width / 4 - axisWidth ) / Globals. RATIO // _privod = FWD; // , _carBody = world. addBox ( { width : this . _width / 2 / Globals. RATIO , height : this . _height / 2 / Globals. RATIO , x : ( this . x + this . _width / 2 ) / Globals. RATIO , y : ( this . y + this . _height / 2 ) / Globals. RATIO , density: 0.48 , driction: 0.3 , restitution: 0.4 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true , skin: null , scaleSkin: true } ) ; this ._frontAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyLeft. body , x1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._frontRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyRight. body , x1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._rearAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyLeft. body , x1: this ._rearAxisBodyLeft. x , y1: this ._rearAxisBodyLeft. y , x2: this ._rearAxisBodyLeft. x , y2: this ._rearAxisBodyLeft. y , enableLimit: true , enableMotor: false , collideConnected: false , lowerAngle: 0 , upperAngle: 0 } ) ; this ._rearRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyRight. body , x1: this ._rearAxisBodyRight. x , y1: this ._rearAxisBodyRight. y , x2: this ._rearAxisBodyRight. x , y2: this ._rearAxisBodyRight. y , enableLimit: true , enableMotor: false , lowerAngle: 0 , upperAngle: 0 } ) ;
// _width = 76 ; _height = 40 ; _maxTurnAngle = 15 * Globals. DEG_TO_RAD ; // _axisOffset: Number = ( _width / 4 - axisWidth ) / Globals. RATIO // _privod = FWD; // , _carBody = world. addBox ( { width : this . _width / 2 / Globals. RATIO , height : this . _height / 2 / Globals. RATIO , x : ( this . x + this . _width / 2 ) / Globals. RATIO , y : ( this . y + this . _height / 2 ) / Globals. RATIO , density: 0.48 , driction: 0.3 , restitution: 0.4 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true , skin: null , scaleSkin: true } ) ; this ._frontAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyLeft. body , x1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._frontRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyRight. body , x1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._rearAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyLeft. body , x1: this ._rearAxisBodyLeft. x , y1: this ._rearAxisBodyLeft. y , x2: this ._rearAxisBodyLeft. x , y2: this ._rearAxisBodyLeft. y , enableLimit: true , enableMotor: false , collideConnected: false , lowerAngle: 0 , upperAngle: 0 } ) ; this ._rearRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyRight. body , x1: this ._rearAxisBodyRight. x , y1: this ._rearAxisBodyRight. y , x2: this ._rearAxisBodyRight. x , y2: this ._rearAxisBodyRight. y , enableLimit: true , enableMotor: false , lowerAngle: 0 , upperAngle: 0 } ) ;
// _width = 76 ; _height = 40 ; _maxTurnAngle = 15 * Globals. DEG_TO_RAD ; // _axisOffset: Number = ( _width / 4 - axisWidth ) / Globals. RATIO // _privod = FWD; // , _carBody = world. addBox ( { width : this . _width / 2 / Globals. RATIO , height : this . _height / 2 / Globals. RATIO , x : ( this . x + this . _width / 2 ) / Globals. RATIO , y : ( this . y + this . _height / 2 ) / Globals. RATIO , density: 0.48 , driction: 0.3 , restitution: 0.4 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true , skin: null , scaleSkin: true } ) ; this ._frontAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyLeft. body , x1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._frontRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyRight. body , x1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._rearAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyLeft. body , x1: this ._rearAxisBodyLeft. x , y1: this ._rearAxisBodyLeft. y , x2: this ._rearAxisBodyLeft. x , y2: this ._rearAxisBodyLeft. y , enableLimit: true , enableMotor: false , collideConnected: false , lowerAngle: 0 , upperAngle: 0 } ) ; this ._rearRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyRight. body , x1: this ._rearAxisBodyRight. x , y1: this ._rearAxisBodyRight. y , x2: this ._rearAxisBodyRight. x , y2: this ._rearAxisBodyRight. y , enableLimit: true , enableMotor: false , lowerAngle: 0 , upperAngle: 0 } ) ;
// _width = 76 ; _height = 40 ; _maxTurnAngle = 15 * Globals. DEG_TO_RAD ; // _axisOffset: Number = ( _width / 4 - axisWidth ) / Globals. RATIO // _privod = FWD; // , _carBody = world. addBox ( { width : this . _width / 2 / Globals. RATIO , height : this . _height / 2 / Globals. RATIO , x : ( this . x + this . _width / 2 ) / Globals. RATIO , y : ( this . y + this . _height / 2 ) / Globals. RATIO , density: 0.48 , driction: 0.3 , restitution: 0.4 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true , skin: null , scaleSkin: true } ) ; this ._frontAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyLeft. body , x1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._frontRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyRight. body , x1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._rearAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyLeft. body , x1: this ._rearAxisBodyLeft. x , y1: this ._rearAxisBodyLeft. y , x2: this ._rearAxisBodyLeft. x , y2: this ._rearAxisBodyLeft. y , enableLimit: true , enableMotor: false , collideConnected: false , lowerAngle: 0 , upperAngle: 0 } ) ; this ._rearRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyRight. body , x1: this ._rearAxisBodyRight. x , y1: this ._rearAxisBodyRight. y , x2: this ._rearAxisBodyRight. x , y2: this ._rearAxisBodyRight. y , enableLimit: true , enableMotor: false , lowerAngle: 0 , upperAngle: 0 } ) ;
// _width = 76 ; _height = 40 ; _maxTurnAngle = 15 * Globals. DEG_TO_RAD ; // _axisOffset: Number = ( _width / 4 - axisWidth ) / Globals. RATIO // _privod = FWD; // , _carBody = world. addBox ( { width : this . _width / 2 / Globals. RATIO , height : this . _height / 2 / Globals. RATIO , x : ( this . x + this . _width / 2 ) / Globals. RATIO , y : ( this . y + this . _height / 2 ) / Globals. RATIO , density: 0.48 , driction: 0.3 , restitution: 0.4 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true , skin: null , scaleSkin: true } ) ; this ._frontAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyLeft. body , x1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._frontRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyRight. body , x1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._rearAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyLeft. body , x1: this ._rearAxisBodyLeft. x , y1: this ._rearAxisBodyLeft. y , x2: this ._rearAxisBodyLeft. x , y2: this ._rearAxisBodyLeft. y , enableLimit: true , enableMotor: false , collideConnected: false , lowerAngle: 0 , upperAngle: 0 } ) ; this ._rearRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyRight. body , x1: this ._rearAxisBodyRight. x , y1: this ._rearAxisBodyRight. y , x2: this ._rearAxisBodyRight. x , y2: this ._rearAxisBodyRight. y , enableLimit: true , enableMotor: false , lowerAngle: 0 , upperAngle: 0 } ) ;
// _width = 76 ; _height = 40 ; _maxTurnAngle = 15 * Globals. DEG_TO_RAD ; // _axisOffset: Number = ( _width / 4 - axisWidth ) / Globals. RATIO // _privod = FWD; // , _carBody = world. addBox ( { width : this . _width / 2 / Globals. RATIO , height : this . _height / 2 / Globals. RATIO , x : ( this . x + this . _width / 2 ) / Globals. RATIO , y : ( this . y + this . _height / 2 ) / Globals. RATIO , density: 0.48 , driction: 0.3 , restitution: 0.4 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true , skin: null , scaleSkin: true } ) ; this ._frontAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyLeft. body , x1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._frontRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyRight. body , x1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._rearAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyLeft. body , x1: this ._rearAxisBodyLeft. x , y1: this ._rearAxisBodyLeft. y , x2: this ._rearAxisBodyLeft. x , y2: this ._rearAxisBodyLeft. y , enableLimit: true , enableMotor: false , collideConnected: false , lowerAngle: 0 , upperAngle: 0 } ) ; this ._rearRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyRight. body , x1: this ._rearAxisBodyRight. x , y1: this ._rearAxisBodyRight. y , x2: this ._rearAxisBodyRight. x , y2: this ._rearAxisBodyRight. y , enableLimit: true , enableMotor: false , lowerAngle: 0 , upperAngle: 0 } ) ;
// _width = 76 ; _height = 40 ; _maxTurnAngle = 15 * Globals. DEG_TO_RAD ; // _axisOffset: Number = ( _width / 4 - axisWidth ) / Globals. RATIO // _privod = FWD; // , _carBody = world. addBox ( { width : this . _width / 2 / Globals. RATIO , height : this . _height / 2 / Globals. RATIO , x : ( this . x + this . _width / 2 ) / Globals. RATIO , y : ( this . y + this . _height / 2 ) / Globals. RATIO , density: 0.48 , driction: 0.3 , restitution: 0.4 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true , skin: null , scaleSkin: true } ) ; this ._frontAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyLeft. body , x1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._frontRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyRight. body , x1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._rearAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyLeft. body , x1: this ._rearAxisBodyLeft. x , y1: this ._rearAxisBodyLeft. y , x2: this ._rearAxisBodyLeft. x , y2: this ._rearAxisBodyLeft. y , enableLimit: true , enableMotor: false , collideConnected: false , lowerAngle: 0 , upperAngle: 0 } ) ; this ._rearRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyRight. body , x1: this ._rearAxisBodyRight. x , y1: this ._rearAxisBodyRight. y , x2: this ._rearAxisBodyRight. x , y2: this ._rearAxisBodyRight. y , enableLimit: true , enableMotor: false , lowerAngle: 0 , upperAngle: 0 } ) ;
// _width = 76 ; _height = 40 ; _maxTurnAngle = 15 * Globals. DEG_TO_RAD ; // _axisOffset: Number = ( _width / 4 - axisWidth ) / Globals. RATIO // _privod = FWD; // , _carBody = world. addBox ( { width : this . _width / 2 / Globals. RATIO , height : this . _height / 2 / Globals. RATIO , x : ( this . x + this . _width / 2 ) / Globals. RATIO , y : ( this . y + this . _height / 2 ) / Globals. RATIO , density: 0.48 , driction: 0.3 , restitution: 0.4 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true , skin: null , scaleSkin: true } ) ; this ._frontAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyLeft. body , x1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._frontRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyRight. body , x1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._rearAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyLeft. body , x1: this ._rearAxisBodyLeft. x , y1: this ._rearAxisBodyLeft. y , x2: this ._rearAxisBodyLeft. x , y2: this ._rearAxisBodyLeft. y , enableLimit: true , enableMotor: false , collideConnected: false , lowerAngle: 0 , upperAngle: 0 } ) ; this ._rearRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyRight. body , x1: this ._rearAxisBodyRight. x , y1: this ._rearAxisBodyRight. y , x2: this ._rearAxisBodyRight. x , y2: this ._rearAxisBodyRight. y , enableLimit: true , enableMotor: false , lowerAngle: 0 , upperAngle: 0 } ) ;
// _width = 76 ; _height = 40 ; _maxTurnAngle = 15 * Globals. DEG_TO_RAD ; // _axisOffset: Number = ( _width / 4 - axisWidth ) / Globals. RATIO // _privod = FWD; // , _carBody = world. addBox ( { width : this . _width / 2 / Globals. RATIO , height : this . _height / 2 / Globals. RATIO , x : ( this . x + this . _width / 2 ) / Globals. RATIO , y : ( this . y + this . _height / 2 ) / Globals. RATIO , density: 0.48 , driction: 0.3 , restitution: 0.4 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true , skin: null , scaleSkin: true } ) ; this ._frontAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyLeft. body , x1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._frontRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyRight. body , x1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._rearAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyLeft. body , x1: this ._rearAxisBodyLeft. x , y1: this ._rearAxisBodyLeft. y , x2: this ._rearAxisBodyLeft. x , y2: this ._rearAxisBodyLeft. y , enableLimit: true , enableMotor: false , collideConnected: false , lowerAngle: 0 , upperAngle: 0 } ) ; this ._rearRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyRight. body , x1: this ._rearAxisBodyRight. x , y1: this ._rearAxisBodyRight. y , x2: this ._rearAxisBodyRight. x , y2: this ._rearAxisBodyRight. y , enableLimit: true , enableMotor: false , lowerAngle: 0 , upperAngle: 0 } ) ;
// _width = 76 ; _height = 40 ; _maxTurnAngle = 15 * Globals. DEG_TO_RAD ; // _axisOffset: Number = ( _width / 4 - axisWidth ) / Globals. RATIO // _privod = FWD; // , _carBody = world. addBox ( { width : this . _width / 2 / Globals. RATIO , height : this . _height / 2 / Globals. RATIO , x : ( this . x + this . _width / 2 ) / Globals. RATIO , y : ( this . y + this . _height / 2 ) / Globals. RATIO , density: 0.48 , driction: 0.3 , restitution: 0.4 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true , skin: null , scaleSkin: true } ) ; this ._frontAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyLeft. body , x1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._frontRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyRight. body , x1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._rearAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyLeft. body , x1: this ._rearAxisBodyLeft. x , y1: this ._rearAxisBodyLeft. y , x2: this ._rearAxisBodyLeft. x , y2: this ._rearAxisBodyLeft. y , enableLimit: true , enableMotor: false , collideConnected: false , lowerAngle: 0 , upperAngle: 0 } ) ; this ._rearRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyRight. body , x1: this ._rearAxisBodyRight. x , y1: this ._rearAxisBodyRight. y , x2: this ._rearAxisBodyRight. x , y2: this ._rearAxisBodyRight. y , enableLimit: true , enableMotor: false , lowerAngle: 0 , upperAngle: 0 } ) ;
// _width = 76 ; _height = 40 ; _maxTurnAngle = 15 * Globals. DEG_TO_RAD ; // _axisOffset: Number = ( _width / 4 - axisWidth ) / Globals. RATIO // _privod = FWD; // , _carBody = world. addBox ( { width : this . _width / 2 / Globals. RATIO , height : this . _height / 2 / Globals. RATIO , x : ( this . x + this . _width / 2 ) / Globals. RATIO , y : ( this . y + this . _height / 2 ) / Globals. RATIO , density: 0.48 , driction: 0.3 , restitution: 0.4 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true , skin: null , scaleSkin: true } ) ; this ._frontAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyLeft. body , x1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._frontRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyRight. body , x1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._rearAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyLeft. body , x1: this ._rearAxisBodyLeft. x , y1: this ._rearAxisBodyLeft. y , x2: this ._rearAxisBodyLeft. x , y2: this ._rearAxisBodyLeft. y , enableLimit: true , enableMotor: false , collideConnected: false , lowerAngle: 0 , upperAngle: 0 } ) ; this ._rearRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyRight. body , x1: this ._rearAxisBodyRight. x , y1: this ._rearAxisBodyRight. y , x2: this ._rearAxisBodyRight. x , y2: this ._rearAxisBodyRight. y , enableLimit: true , enableMotor: false , lowerAngle: 0 , upperAngle: 0 } ) ;
// _width = 76 ; _height = 40 ; _maxTurnAngle = 15 * Globals. DEG_TO_RAD ; // _axisOffset: Number = ( _width / 4 - axisWidth ) / Globals. RATIO // _privod = FWD; // , _carBody = world. addBox ( { width : this . _width / 2 / Globals. RATIO , height : this . _height / 2 / Globals. RATIO , x : ( this . x + this . _width / 2 ) / Globals. RATIO , y : ( this . y + this . _height / 2 ) / Globals. RATIO , density: 0.48 , driction: 0.3 , restitution: 0.4 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true , skin: null , scaleSkin: true } ) ; this ._frontAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyLeft. body , x1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._frontRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyRight. body , x1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._rearAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyLeft. body , x1: this ._rearAxisBodyLeft. x , y1: this ._rearAxisBodyLeft. y , x2: this ._rearAxisBodyLeft. x , y2: this ._rearAxisBodyLeft. y , enableLimit: true , enableMotor: false , collideConnected: false , lowerAngle: 0 , upperAngle: 0 } ) ; this ._rearRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyRight. body , x1: this ._rearAxisBodyRight. x , y1: this ._rearAxisBodyRight. y , x2: this ._rearAxisBodyRight. x , y2: this ._rearAxisBodyRight. y , enableLimit: true , enableMotor: false , lowerAngle: 0 , upperAngle: 0 } ) ;
// _width = 76 ; _height = 40 ; _maxTurnAngle = 15 * Globals. DEG_TO_RAD ; // _axisOffset: Number = ( _width / 4 - axisWidth ) / Globals. RATIO // _privod = FWD; // , _carBody = world. addBox ( { width : this . _width / 2 / Globals. RATIO , height : this . _height / 2 / Globals. RATIO , x : ( this . x + this . _width / 2 ) / Globals. RATIO , y : ( this . y + this . _height / 2 ) / Globals. RATIO , density: 0.48 , driction: 0.3 , restitution: 0.4 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true , skin: null , scaleSkin: true } ) ; this ._frontAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyLeft. body , x1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._frontRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyRight. body , x1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._rearAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyLeft. body , x1: this ._rearAxisBodyLeft. x , y1: this ._rearAxisBodyLeft. y , x2: this ._rearAxisBodyLeft. x , y2: this ._rearAxisBodyLeft. y , enableLimit: true , enableMotor: false , collideConnected: false , lowerAngle: 0 , upperAngle: 0 } ) ; this ._rearRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyRight. body , x1: this ._rearAxisBodyRight. x , y1: this ._rearAxisBodyRight. y , x2: this ._rearAxisBodyRight. x , y2: this ._rearAxisBodyRight. y , enableLimit: true , enableMotor: false , lowerAngle: 0 , upperAngle: 0 } ) ;
// _width = 76 ; _height = 40 ; _maxTurnAngle = 15 * Globals. DEG_TO_RAD ; // _axisOffset: Number = ( _width / 4 - axisWidth ) / Globals. RATIO // _privod = FWD; // , _carBody = world. addBox ( { width : this . _width / 2 / Globals. RATIO , height : this . _height / 2 / Globals. RATIO , x : ( this . x + this . _width / 2 ) / Globals. RATIO , y : ( this . y + this . _height / 2 ) / Globals. RATIO , density: 0.48 , driction: 0.3 , restitution: 0.4 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true , skin: null , scaleSkin: true } ) ; this ._frontAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyLeft. body , x1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._frontRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyRight. body , x1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._rearAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyLeft. body , x1: this ._rearAxisBodyLeft. x , y1: this ._rearAxisBodyLeft. y , x2: this ._rearAxisBodyLeft. x , y2: this ._rearAxisBodyLeft. y , enableLimit: true , enableMotor: false , collideConnected: false , lowerAngle: 0 , upperAngle: 0 } ) ; this ._rearRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyRight. body , x1: this ._rearAxisBodyRight. x , y1: this ._rearAxisBodyRight. y , x2: this ._rearAxisBodyRight. x , y2: this ._rearAxisBodyRight. y , enableLimit: true , enableMotor: false , lowerAngle: 0 , upperAngle: 0 } ) ;
// _width = 76 ; _height = 40 ; _maxTurnAngle = 15 * Globals. DEG_TO_RAD ; // _axisOffset: Number = ( _width / 4 - axisWidth ) / Globals. RATIO // _privod = FWD; // , _carBody = world. addBox ( { width : this . _width / 2 / Globals. RATIO , height : this . _height / 2 / Globals. RATIO , x : ( this . x + this . _width / 2 ) / Globals. RATIO , y : ( this . y + this . _height / 2 ) / Globals. RATIO , density: 0.48 , driction: 0.3 , restitution: 0.4 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true , skin: null , scaleSkin: true } ) ; this ._frontAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyLeft. body , x1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._frontRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyRight. body , x1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._rearAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyLeft. body , x1: this ._rearAxisBodyLeft. x , y1: this ._rearAxisBodyLeft. y , x2: this ._rearAxisBodyLeft. x , y2: this ._rearAxisBodyLeft. y , enableLimit: true , enableMotor: false , collideConnected: false , lowerAngle: 0 , upperAngle: 0 } ) ; this ._rearRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyRight. body , x1: this ._rearAxisBodyRight. x , y1: this ._rearAxisBodyRight. y , x2: this ._rearAxisBodyRight. x , y2: this ._rearAxisBodyRight. y , enableLimit: true , enableMotor: false , lowerAngle: 0 , upperAngle: 0 } ) ;
// _width = 76 ; _height = 40 ; _maxTurnAngle = 15 * Globals. DEG_TO_RAD ; // _axisOffset: Number = ( _width / 4 - axisWidth ) / Globals. RATIO // _privod = FWD; // , _carBody = world. addBox ( { width : this . _width / 2 / Globals. RATIO , height : this . _height / 2 / Globals. RATIO , x : ( this . x + this . _width / 2 ) / Globals. RATIO , y : ( this . y + this . _height / 2 ) / Globals. RATIO , density: 0.48 , driction: 0.3 , restitution: 0.4 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true , skin: null , scaleSkin: true } ) ; this ._frontAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyLeft. body , x1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._frontRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyRight. body , x1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._rearAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyLeft. body , x1: this ._rearAxisBodyLeft. x , y1: this ._rearAxisBodyLeft. y , x2: this ._rearAxisBodyLeft. x , y2: this ._rearAxisBodyLeft. y , enableLimit: true , enableMotor: false , collideConnected: false , lowerAngle: 0 , upperAngle: 0 } ) ; this ._rearRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyRight. body , x1: this ._rearAxisBodyRight. x , y1: this ._rearAxisBodyRight. y , x2: this ._rearAxisBodyRight. x , y2: this ._rearAxisBodyRight. y , enableLimit: true , enableMotor: false , lowerAngle: 0 , upperAngle: 0 } ) ;
// _width = 76 ; _height = 40 ; _maxTurnAngle = 15 * Globals. DEG_TO_RAD ; // _axisOffset: Number = ( _width / 4 - axisWidth ) / Globals. RATIO // _privod = FWD; // , _carBody = world. addBox ( { width : this . _width / 2 / Globals. RATIO , height : this . _height / 2 / Globals. RATIO , x : ( this . x + this . _width / 2 ) / Globals. RATIO , y : ( this . y + this . _height / 2 ) / Globals. RATIO , density: 0.48 , driction: 0.3 , restitution: 0.4 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true , skin: null , scaleSkin: true } ) ; this ._frontAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyLeft. body , x1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._frontRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyRight. body , x1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._rearAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyLeft. body , x1: this ._rearAxisBodyLeft. x , y1: this ._rearAxisBodyLeft. y , x2: this ._rearAxisBodyLeft. x , y2: this ._rearAxisBodyLeft. y , enableLimit: true , enableMotor: false , collideConnected: false , lowerAngle: 0 , upperAngle: 0 } ) ; this ._rearRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyRight. body , x1: this ._rearAxisBodyRight. x , y1: this ._rearAxisBodyRight. y , x2: this ._rearAxisBodyRight. x , y2: this ._rearAxisBodyRight. y , enableLimit: true , enableMotor: false , lowerAngle: 0 , upperAngle: 0 } ) ;
// _width = 76 ; _height = 40 ; _maxTurnAngle = 15 * Globals. DEG_TO_RAD ; // _axisOffset: Number = ( _width / 4 - axisWidth ) / Globals. RATIO // _privod = FWD; // , _carBody = world. addBox ( { width : this . _width / 2 / Globals. RATIO , height : this . _height / 2 / Globals. RATIO , x : ( this . x + this . _width / 2 ) / Globals. RATIO , y : ( this . y + this . _height / 2 ) / Globals. RATIO , density: 0.48 , driction: 0.3 , restitution: 0.4 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true , skin: null , scaleSkin: true } ) ; this ._frontAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyLeft. body , x1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._frontRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyRight. body , x1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._rearAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyLeft. body , x1: this ._rearAxisBodyLeft. x , y1: this ._rearAxisBodyLeft. y , x2: this ._rearAxisBodyLeft. x , y2: this ._rearAxisBodyLeft. y , enableLimit: true , enableMotor: false , collideConnected: false , lowerAngle: 0 , upperAngle: 0 } ) ; this ._rearRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyRight. body , x1: this ._rearAxisBodyRight. x , y1: this ._rearAxisBodyRight. y , x2: this ._rearAxisBodyRight. x , y2: this ._rearAxisBodyRight. y , enableLimit: true , enableMotor: false , lowerAngle: 0 , upperAngle: 0 } ) ;
// _width = 76 ; _height = 40 ; _maxTurnAngle = 15 * Globals. DEG_TO_RAD ; // _axisOffset: Number = ( _width / 4 - axisWidth ) / Globals. RATIO // _privod = FWD; // , _carBody = world. addBox ( { width : this . _width / 2 / Globals. RATIO , height : this . _height / 2 / Globals. RATIO , x : ( this . x + this . _width / 2 ) / Globals. RATIO , y : ( this . y + this . _height / 2 ) / Globals. RATIO , density: 0.48 , driction: 0.3 , restitution: 0.4 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true , skin: null , scaleSkin: true } ) ; this ._frontAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyLeft. body , x1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._frontRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyRight. body , x1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._rearAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyLeft. body , x1: this ._rearAxisBodyLeft. x , y1: this ._rearAxisBodyLeft. y , x2: this ._rearAxisBodyLeft. x , y2: this ._rearAxisBodyLeft. y , enableLimit: true , enableMotor: false , collideConnected: false , lowerAngle: 0 , upperAngle: 0 } ) ; this ._rearRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyRight. body , x1: this ._rearAxisBodyRight. x , y1: this ._rearAxisBodyRight. y , x2: this ._rearAxisBodyRight. x , y2: this ._rearAxisBodyRight. y , enableLimit: true , enableMotor: false , lowerAngle: 0 , upperAngle: 0 } ) ;
// _width = 76 ; _height = 40 ; _maxTurnAngle = 15 * Globals. DEG_TO_RAD ; // _axisOffset: Number = ( _width / 4 - axisWidth ) / Globals. RATIO // _privod = FWD; // , _carBody = world. addBox ( { width : this . _width / 2 / Globals. RATIO , height : this . _height / 2 / Globals. RATIO , x : ( this . x + this . _width / 2 ) / Globals. RATIO , y : ( this . y + this . _height / 2 ) / Globals. RATIO , density: 0.48 , driction: 0.3 , restitution: 0.4 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true , skin: null , scaleSkin: true } ) ; this ._frontAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyLeft. body , x1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._frontRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyRight. body , x1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._rearAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyLeft. body , x1: this ._rearAxisBodyLeft. x , y1: this ._rearAxisBodyLeft. y , x2: this ._rearAxisBodyLeft. x , y2: this ._rearAxisBodyLeft. y , enableLimit: true , enableMotor: false , collideConnected: false , lowerAngle: 0 , upperAngle: 0 } ) ; this ._rearRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyRight. body , x1: this ._rearAxisBodyRight. x , y1: this ._rearAxisBodyRight. y , x2: this ._rearAxisBodyRight. x , y2: this ._rearAxisBodyRight. y , enableLimit: true , enableMotor: false , lowerAngle: 0 , upperAngle: 0 } ) ;
// _width = 76 ; _height = 40 ; _maxTurnAngle = 15 * Globals. DEG_TO_RAD ; // _axisOffset: Number = ( _width / 4 - axisWidth ) / Globals. RATIO // _privod = FWD; // , _carBody = world. addBox ( { width : this . _width / 2 / Globals. RATIO , height : this . _height / 2 / Globals. RATIO , x : ( this . x + this . _width / 2 ) / Globals. RATIO , y : ( this . y + this . _height / 2 ) / Globals. RATIO , density: 0.48 , driction: 0.3 , restitution: 0.4 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true , skin: null , scaleSkin: true } ) ; this ._frontAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyLeft. body , x1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._frontRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyRight. body , x1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._rearAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyLeft. body , x1: this ._rearAxisBodyLeft. x , y1: this ._rearAxisBodyLeft. y , x2: this ._rearAxisBodyLeft. x , y2: this ._rearAxisBodyLeft. y , enableLimit: true , enableMotor: false , collideConnected: false , lowerAngle: 0 , upperAngle: 0 } ) ; this ._rearRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyRight. body , x1: this ._rearAxisBodyRight. x , y1: this ._rearAxisBodyRight. y , x2: this ._rearAxisBodyRight. x , y2: this ._rearAxisBodyRight. y , enableLimit: true , enableMotor: false , lowerAngle: 0 , upperAngle: 0 } ) ;
// _width = 76 ; _height = 40 ; _maxTurnAngle = 15 * Globals. DEG_TO_RAD ; // _axisOffset: Number = ( _width / 4 - axisWidth ) / Globals. RATIO // _privod = FWD; // , _carBody = world. addBox ( { width : this . _width / 2 / Globals. RATIO , height : this . _height / 2 / Globals. RATIO , x : ( this . x + this . _width / 2 ) / Globals. RATIO , y : ( this . y + this . _height / 2 ) / Globals. RATIO , density: 0.48 , driction: 0.3 , restitution: 0.4 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true , skin: null , scaleSkin: true } ) ; this ._frontAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyLeft. body , x1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._frontRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyRight. body , x1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._rearAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyLeft. body , x1: this ._rearAxisBodyLeft. x , y1: this ._rearAxisBodyLeft. y , x2: this ._rearAxisBodyLeft. x , y2: this ._rearAxisBodyLeft. y , enableLimit: true , enableMotor: false , collideConnected: false , lowerAngle: 0 , upperAngle: 0 } ) ; this ._rearRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyRight. body , x1: this ._rearAxisBodyRight. x , y1: this ._rearAxisBodyRight. y , x2: this ._rearAxisBodyRight. x , y2: this ._rearAxisBodyRight. y , enableLimit: true , enableMotor: false , lowerAngle: 0 , upperAngle: 0 } ) ;
// _width = 76 ; _height = 40 ; _maxTurnAngle = 15 * Globals. DEG_TO_RAD ; // _axisOffset: Number = ( _width / 4 - axisWidth ) / Globals. RATIO // _privod = FWD; // , _carBody = world. addBox ( { width : this . _width / 2 / Globals. RATIO , height : this . _height / 2 / Globals. RATIO , x : ( this . x + this . _width / 2 ) / Globals. RATIO , y : ( this . y + this . _height / 2 ) / Globals. RATIO , density: 0.48 , driction: 0.3 , restitution: 0.4 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true , skin: null , scaleSkin: true } ) ; this ._frontAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyLeft. body , x1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._frontRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyRight. body , x1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._rearAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyLeft. body , x1: this ._rearAxisBodyLeft. x , y1: this ._rearAxisBodyLeft. y , x2: this ._rearAxisBodyLeft. x , y2: this ._rearAxisBodyLeft. y , enableLimit: true , enableMotor: false , collideConnected: false , lowerAngle: 0 , upperAngle: 0 } ) ; this ._rearRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyRight. body , x1: this ._rearAxisBodyRight. x , y1: this ._rearAxisBodyRight. y , x2: this ._rearAxisBodyRight. x , y2: this ._rearAxisBodyRight. y , enableLimit: true , enableMotor: false , lowerAngle: 0 , upperAngle: 0 } ) ;
// _width = 76 ; _height = 40 ; _maxTurnAngle = 15 * Globals. DEG_TO_RAD ; // _axisOffset: Number = ( _width / 4 - axisWidth ) / Globals. RATIO // _privod = FWD; // , _carBody = world. addBox ( { width : this . _width / 2 / Globals. RATIO , height : this . _height / 2 / Globals. RATIO , x : ( this . x + this . _width / 2 ) / Globals. RATIO , y : ( this . y + this . _height / 2 ) / Globals. RATIO , density: 0.48 , driction: 0.3 , restitution: 0.4 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true , skin: null , scaleSkin: true } ) ; this ._frontAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyLeft. body , x1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._frontRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyRight. body , x1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._rearAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyLeft. body , x1: this ._rearAxisBodyLeft. x , y1: this ._rearAxisBodyLeft. y , x2: this ._rearAxisBodyLeft. x , y2: this ._rearAxisBodyLeft. y , enableLimit: true , enableMotor: false , collideConnected: false , lowerAngle: 0 , upperAngle: 0 } ) ; this ._rearRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyRight. body , x1: this ._rearAxisBodyRight. x , y1: this ._rearAxisBodyRight. y , x2: this ._rearAxisBodyRight. x , y2: this ._rearAxisBodyRight. y , enableLimit: true , enableMotor: false , lowerAngle: 0 , upperAngle: 0 } ) ;
// _width = 76 ; _height = 40 ; _maxTurnAngle = 15 * Globals. DEG_TO_RAD ; // _axisOffset: Number = ( _width / 4 - axisWidth ) / Globals. RATIO // _privod = FWD; // , _carBody = world. addBox ( { width : this . _width / 2 / Globals. RATIO , height : this . _height / 2 / Globals. RATIO , x : ( this . x + this . _width / 2 ) / Globals. RATIO , y : ( this . y + this . _height / 2 ) / Globals. RATIO , density: 0.48 , driction: 0.3 , restitution: 0.4 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true , skin: null , scaleSkin: true } ) ; this ._frontAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyLeft. body , x1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._frontRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyRight. body , x1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._rearAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyLeft. body , x1: this ._rearAxisBodyLeft. x , y1: this ._rearAxisBodyLeft. y , x2: this ._rearAxisBodyLeft. x , y2: this ._rearAxisBodyLeft. y , enableLimit: true , enableMotor: false , collideConnected: false , lowerAngle: 0 , upperAngle: 0 } ) ; this ._rearRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyRight. body , x1: this ._rearAxisBodyRight. x , y1: this ._rearAxisBodyRight. y , x2: this ._rearAxisBodyRight. x , y2: this ._rearAxisBodyRight. y , enableLimit: true , enableMotor: false , lowerAngle: 0 , upperAngle: 0 } ) ;
// _width = 76 ; _height = 40 ; _maxTurnAngle = 15 * Globals. DEG_TO_RAD ; // _axisOffset: Number = ( _width / 4 - axisWidth ) / Globals. RATIO // _privod = FWD; // , _carBody = world. addBox ( { width : this . _width / 2 / Globals. RATIO , height : this . _height / 2 / Globals. RATIO , x : ( this . x + this . _width / 2 ) / Globals. RATIO , y : ( this . y + this . _height / 2 ) / Globals. RATIO , density: 0.48 , driction: 0.3 , restitution: 0.4 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true , skin: null , scaleSkin: true } ) ; this ._frontAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyLeft. body , x1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._frontRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyRight. body , x1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._rearAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyLeft. body , x1: this ._rearAxisBodyLeft. x , y1: this ._rearAxisBodyLeft. y , x2: this ._rearAxisBodyLeft. x , y2: this ._rearAxisBodyLeft. y , enableLimit: true , enableMotor: false , collideConnected: false , lowerAngle: 0 , upperAngle: 0 } ) ; this ._rearRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyRight. body , x1: this ._rearAxisBodyRight. x , y1: this ._rearAxisBodyRight. y , x2: this ._rearAxisBodyRight. x , y2: this ._rearAxisBodyRight. y , enableLimit: true , enableMotor: false , lowerAngle: 0 , upperAngle: 0 } ) ;
// _width = 76 ; _height = 40 ; _maxTurnAngle = 15 * Globals. DEG_TO_RAD ; // _axisOffset: Number = ( _width / 4 - axisWidth ) / Globals. RATIO // _privod = FWD; // , _carBody = world. addBox ( { width : this . _width / 2 / Globals. RATIO , height : this . _height / 2 / Globals. RATIO , x : ( this . x + this . _width / 2 ) / Globals. RATIO , y : ( this . y + this . _height / 2 ) / Globals. RATIO , density: 0.48 , driction: 0.3 , restitution: 0.4 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true , skin: null , scaleSkin: true } ) ; this ._frontAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyLeft. body , x1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._frontRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyRight. body , x1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._rearAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyLeft. body , x1: this ._rearAxisBodyLeft. x , y1: this ._rearAxisBodyLeft. y , x2: this ._rearAxisBodyLeft. x , y2: this ._rearAxisBodyLeft. y , enableLimit: true , enableMotor: false , collideConnected: false , lowerAngle: 0 , upperAngle: 0 } ) ; this ._rearRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyRight. body , x1: this ._rearAxisBodyRight. x , y1: this ._rearAxisBodyRight. y , x2: this ._rearAxisBodyRight. x , y2: this ._rearAxisBodyRight. y , enableLimit: true , enableMotor: false , lowerAngle: 0 , upperAngle: 0 } ) ;
// _width = 76 ; _height = 40 ; _maxTurnAngle = 15 * Globals. DEG_TO_RAD ; // _axisOffset: Number = ( _width / 4 - axisWidth ) / Globals. RATIO // _privod = FWD; // , _carBody = world. addBox ( { width : this . _width / 2 / Globals. RATIO , height : this . _height / 2 / Globals. RATIO , x : ( this . x + this . _width / 2 ) / Globals. RATIO , y : ( this . y + this . _height / 2 ) / Globals. RATIO , density: 0.48 , driction: 0.3 , restitution: 0.4 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true , skin: null , scaleSkin: true } ) ; this ._frontAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyLeft. body , x1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._frontRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyRight. body , x1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._rearAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyLeft. body , x1: this ._rearAxisBodyLeft. x , y1: this ._rearAxisBodyLeft. y , x2: this ._rearAxisBodyLeft. x , y2: this ._rearAxisBodyLeft. y , enableLimit: true , enableMotor: false , collideConnected: false , lowerAngle: 0 , upperAngle: 0 } ) ; this ._rearRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyRight. body , x1: this ._rearAxisBodyRight. x , y1: this ._rearAxisBodyRight. y , x2: this ._rearAxisBodyRight. x , y2: this ._rearAxisBodyRight. y , enableLimit: true , enableMotor: false , lowerAngle: 0 , upperAngle: 0 } ) ;
// _width = 76 ; _height = 40 ; _maxTurnAngle = 15 * Globals. DEG_TO_RAD ; // _axisOffset: Number = ( _width / 4 - axisWidth ) / Globals. RATIO // _privod = FWD; // , _carBody = world. addBox ( { width : this . _width / 2 / Globals. RATIO , height : this . _height / 2 / Globals. RATIO , x : ( this . x + this . _width / 2 ) / Globals. RATIO , y : ( this . y + this . _height / 2 ) / Globals. RATIO , density: 0.48 , driction: 0.3 , restitution: 0.4 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true , skin: null , scaleSkin: true } ) ; this ._frontAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyLeft. body , x1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._frontRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyRight. body , x1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._rearAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyLeft. body , x1: this ._rearAxisBodyLeft. x , y1: this ._rearAxisBodyLeft. y , x2: this ._rearAxisBodyLeft. x , y2: this ._rearAxisBodyLeft. y , enableLimit: true , enableMotor: false , collideConnected: false , lowerAngle: 0 , upperAngle: 0 } ) ; this ._rearRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyRight. body , x1: this ._rearAxisBodyRight. x , y1: this ._rearAxisBodyRight. y , x2: this ._rearAxisBodyRight. x , y2: this ._rearAxisBodyRight. y , enableLimit: true , enableMotor: false , lowerAngle: 0 , upperAngle: 0 } ) ;
// _width = 76 ; _height = 40 ; _maxTurnAngle = 15 * Globals. DEG_TO_RAD ; // _axisOffset: Number = ( _width / 4 - axisWidth ) / Globals. RATIO // _privod = FWD; // , _carBody = world. addBox ( { width : this . _width / 2 / Globals. RATIO , height : this . _height / 2 / Globals. RATIO , x : ( this . x + this . _width / 2 ) / Globals. RATIO , y : ( this . y + this . _height / 2 ) / Globals. RATIO , density: 0.48 , driction: 0.3 , restitution: 0.4 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true , skin: null , scaleSkin: true } ) ; this ._frontAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyLeft. body , x1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._frontRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyRight. body , x1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._rearAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyLeft. body , x1: this ._rearAxisBodyLeft. x , y1: this ._rearAxisBodyLeft. y , x2: this ._rearAxisBodyLeft. x , y2: this ._rearAxisBodyLeft. y , enableLimit: true , enableMotor: false , collideConnected: false , lowerAngle: 0 , upperAngle: 0 } ) ; this ._rearRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyRight. body , x1: this ._rearAxisBodyRight. x , y1: this ._rearAxisBodyRight. y , x2: this ._rearAxisBodyRight. x , y2: this ._rearAxisBodyRight. y , enableLimit: true , enableMotor: false , lowerAngle: 0 , upperAngle: 0 } ) ;
// _width = 76 ; _height = 40 ; _maxTurnAngle = 15 * Globals. DEG_TO_RAD ; // _axisOffset: Number = ( _width / 4 - axisWidth ) / Globals. RATIO // _privod = FWD; // , _carBody = world. addBox ( { width : this . _width / 2 / Globals. RATIO , height : this . _height / 2 / Globals. RATIO , x : ( this . x + this . _width / 2 ) / Globals. RATIO , y : ( this . y + this . _height / 2 ) / Globals. RATIO , density: 0.48 , driction: 0.3 , restitution: 0.4 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true , skin: null , scaleSkin: true } ) ; this ._frontAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyLeft. body , x1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._frontRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyRight. body , x1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._rearAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyLeft. body , x1: this ._rearAxisBodyLeft. x , y1: this ._rearAxisBodyLeft. y , x2: this ._rearAxisBodyLeft. x , y2: this ._rearAxisBodyLeft. y , enableLimit: true , enableMotor: false , collideConnected: false , lowerAngle: 0 , upperAngle: 0 } ) ; this ._rearRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyRight. body , x1: this ._rearAxisBodyRight. x , y1: this ._rearAxisBodyRight. y , x2: this ._rearAxisBodyRight. x , y2: this ._rearAxisBodyRight. y , enableLimit: true , enableMotor: false , lowerAngle: 0 , upperAngle: 0 } ) ;
// _width = 76 ; _height = 40 ; _maxTurnAngle = 15 * Globals. DEG_TO_RAD ; // _axisOffset: Number = ( _width / 4 - axisWidth ) / Globals. RATIO // _privod = FWD; // , _carBody = world. addBox ( { width : this . _width / 2 / Globals. RATIO , height : this . _height / 2 / Globals. RATIO , x : ( this . x + this . _width / 2 ) / Globals. RATIO , y : ( this . y + this . _height / 2 ) / Globals. RATIO , density: 0.48 , driction: 0.3 , restitution: 0.4 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true , skin: null , scaleSkin: true } ) ; this ._frontAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyLeft. body , x1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._frontRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyRight. body , x1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._rearAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyLeft. body , x1: this ._rearAxisBodyLeft. x , y1: this ._rearAxisBodyLeft. y , x2: this ._rearAxisBodyLeft. x , y2: this ._rearAxisBodyLeft. y , enableLimit: true , enableMotor: false , collideConnected: false , lowerAngle: 0 , upperAngle: 0 } ) ; this ._rearRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyRight. body , x1: this ._rearAxisBodyRight. x , y1: this ._rearAxisBodyRight. y , x2: this ._rearAxisBodyRight. x , y2: this ._rearAxisBodyRight. y , enableLimit: true , enableMotor: false , lowerAngle: 0 , upperAngle: 0 } ) ;
// _width = 76 ; _height = 40 ; _maxTurnAngle = 15 * Globals. DEG_TO_RAD ; // _axisOffset: Number = ( _width / 4 - axisWidth ) / Globals. RATIO // _privod = FWD; // , _carBody = world. addBox ( { width : this . _width / 2 / Globals. RATIO , height : this . _height / 2 / Globals. RATIO , x : ( this . x + this . _width / 2 ) / Globals. RATIO , y : ( this . y + this . _height / 2 ) / Globals. RATIO , density: 0.48 , driction: 0.3 , restitution: 0.4 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true , skin: null , scaleSkin: true } ) ; this ._frontAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyLeft. body , x1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._frontRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyRight. body , x1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._rearAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyLeft. body , x1: this ._rearAxisBodyLeft. x , y1: this ._rearAxisBodyLeft. y , x2: this ._rearAxisBodyLeft. x , y2: this ._rearAxisBodyLeft. y , enableLimit: true , enableMotor: false , collideConnected: false , lowerAngle: 0 , upperAngle: 0 } ) ; this ._rearRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyRight. body , x1: this ._rearAxisBodyRight. x , y1: this ._rearAxisBodyRight. y , x2: this ._rearAxisBodyRight. x , y2: this ._rearAxisBodyRight. y , enableLimit: true , enableMotor: false , lowerAngle: 0 , upperAngle: 0 } ) ;
// _width = 76 ; _height = 40 ; _maxTurnAngle = 15 * Globals. DEG_TO_RAD ; // _axisOffset: Number = ( _width / 4 - axisWidth ) / Globals. RATIO // _privod = FWD; // , _carBody = world. addBox ( { width : this . _width / 2 / Globals. RATIO , height : this . _height / 2 / Globals. RATIO , x : ( this . x + this . _width / 2 ) / Globals. RATIO , y : ( this . y + this . _height / 2 ) / Globals. RATIO , density: 0.48 , driction: 0.3 , restitution: 0.4 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true , skin: null , scaleSkin: true } ) ; this ._frontAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyLeft. body , x1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._frontRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyRight. body , x1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._rearAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyLeft. body , x1: this ._rearAxisBodyLeft. x , y1: this ._rearAxisBodyLeft. y , x2: this ._rearAxisBodyLeft. x , y2: this ._rearAxisBodyLeft. y , enableLimit: true , enableMotor: false , collideConnected: false , lowerAngle: 0 , upperAngle: 0 } ) ; this ._rearRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyRight. body , x1: this ._rearAxisBodyRight. x , y1: this ._rearAxisBodyRight. y , x2: this ._rearAxisBodyRight. x , y2: this ._rearAxisBodyRight. y , enableLimit: true , enableMotor: false , lowerAngle: 0 , upperAngle: 0 } ) ;
// _width = 76 ; _height = 40 ; _maxTurnAngle = 15 * Globals. DEG_TO_RAD ; // _axisOffset: Number = ( _width / 4 - axisWidth ) / Globals. RATIO // _privod = FWD; // , _carBody = world. addBox ( { width : this . _width / 2 / Globals. RATIO , height : this . _height / 2 / Globals. RATIO , x : ( this . x + this . _width / 2 ) / Globals. RATIO , y : ( this . y + this . _height / 2 ) / Globals. RATIO , density: 0.48 , driction: 0.3 , restitution: 0.4 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true , skin: null , scaleSkin: true } ) ; this ._frontAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyLeft. body , x1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._frontRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyRight. body , x1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._rearAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyLeft. body , x1: this ._rearAxisBodyLeft. x , y1: this ._rearAxisBodyLeft. y , x2: this ._rearAxisBodyLeft. x , y2: this ._rearAxisBodyLeft. y , enableLimit: true , enableMotor: false , collideConnected: false , lowerAngle: 0 , upperAngle: 0 } ) ; this ._rearRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyRight. body , x1: this ._rearAxisBodyRight. x , y1: this ._rearAxisBodyRight. y , x2: this ._rearAxisBodyRight. x , y2: this ._rearAxisBodyRight. y , enableLimit: true , enableMotor: false , lowerAngle: 0 , upperAngle: 0 } ) ;
// _width = 76 ; _height = 40 ; _maxTurnAngle = 15 * Globals. DEG_TO_RAD ; // _axisOffset: Number = ( _width / 4 - axisWidth ) / Globals. RATIO // _privod = FWD; // , _carBody = world. addBox ( { width : this . _width / 2 / Globals. RATIO , height : this . _height / 2 / Globals. RATIO , x : ( this . x + this . _width / 2 ) / Globals. RATIO , y : ( this . y + this . _height / 2 ) / Globals. RATIO , density: 0.48 , driction: 0.3 , restitution: 0.4 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true , skin: null , scaleSkin: true } ) ; this ._frontAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyLeft. body , x1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._frontRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyRight. body , x1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._rearAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyLeft. body , x1: this ._rearAxisBodyLeft. x , y1: this ._rearAxisBodyLeft. y , x2: this ._rearAxisBodyLeft. x , y2: this ._rearAxisBodyLeft. y , enableLimit: true , enableMotor: false , collideConnected: false , lowerAngle: 0 , upperAngle: 0 } ) ; this ._rearRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyRight. body , x1: this ._rearAxisBodyRight. x , y1: this ._rearAxisBodyRight. y , x2: this ._rearAxisBodyRight. x , y2: this ._rearAxisBodyRight. y , enableLimit: true , enableMotor: false , lowerAngle: 0 , upperAngle: 0 } ) ;
// _width = 76 ; _height = 40 ; _maxTurnAngle = 15 * Globals. DEG_TO_RAD ; // _axisOffset: Number = ( _width / 4 - axisWidth ) / Globals. RATIO // _privod = FWD; // , _carBody = world. addBox ( { width : this . _width / 2 / Globals. RATIO , height : this . _height / 2 / Globals. RATIO , x : ( this . x + this . _width / 2 ) / Globals. RATIO , y : ( this . y + this . _height / 2 ) / Globals. RATIO , density: 0.48 , driction: 0.3 , restitution: 0.4 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true , skin: null , scaleSkin: true } ) ; this ._frontAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyLeft. body , x1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._frontRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyRight. body , x1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._rearAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyLeft. body , x1: this ._rearAxisBodyLeft. x , y1: this ._rearAxisBodyLeft. y , x2: this ._rearAxisBodyLeft. x , y2: this ._rearAxisBodyLeft. y , enableLimit: true , enableMotor: false , collideConnected: false , lowerAngle: 0 , upperAngle: 0 } ) ; this ._rearRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyRight. body , x1: this ._rearAxisBodyRight. x , y1: this ._rearAxisBodyRight. y , x2: this ._rearAxisBodyRight. x , y2: this ._rearAxisBodyRight. y , enableLimit: true , enableMotor: false , lowerAngle: 0 , upperAngle: 0 } ) ;
// _width = 76 ; _height = 40 ; _maxTurnAngle = 15 * Globals. DEG_TO_RAD ; // _axisOffset: Number = ( _width / 4 - axisWidth ) / Globals. RATIO // _privod = FWD; // , _carBody = world. addBox ( { width : this . _width / 2 / Globals. RATIO , height : this . _height / 2 / Globals. RATIO , x : ( this . x + this . _width / 2 ) / Globals. RATIO , y : ( this . y + this . _height / 2 ) / Globals. RATIO , density: 0.48 , driction: 0.3 , restitution: 0.4 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true , skin: null , scaleSkin: true } ) ; this ._frontAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyLeft. body , x1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._frontRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyRight. body , x1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._rearAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyLeft. body , x1: this ._rearAxisBodyLeft. x , y1: this ._rearAxisBodyLeft. y , x2: this ._rearAxisBodyLeft. x , y2: this ._rearAxisBodyLeft. y , enableLimit: true , enableMotor: false , collideConnected: false , lowerAngle: 0 , upperAngle: 0 } ) ; this ._rearRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyRight. body , x1: this ._rearAxisBodyRight. x , y1: this ._rearAxisBodyRight. y , x2: this ._rearAxisBodyRight. x , y2: this ._rearAxisBodyRight. y , enableLimit: true , enableMotor: false , lowerAngle: 0 , upperAngle: 0 } ) ;
// _width = 76 ; _height = 40 ; _maxTurnAngle = 15 * Globals. DEG_TO_RAD ; // _axisOffset: Number = ( _width / 4 - axisWidth ) / Globals. RATIO // _privod = FWD; // , _carBody = world. addBox ( { width : this . _width / 2 / Globals. RATIO , height : this . _height / 2 / Globals. RATIO , x : ( this . x + this . _width / 2 ) / Globals. RATIO , y : ( this . y + this . _height / 2 ) / Globals. RATIO , density: 0.48 , driction: 0.3 , restitution: 0.4 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true , skin: null , scaleSkin: true } ) ; this ._frontAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyLeft. body , x1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._frontRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyRight. body , x1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._rearAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyLeft. body , x1: this ._rearAxisBodyLeft. x , y1: this ._rearAxisBodyLeft. y , x2: this ._rearAxisBodyLeft. x , y2: this ._rearAxisBodyLeft. y , enableLimit: true , enableMotor: false , collideConnected: false , lowerAngle: 0 , upperAngle: 0 } ) ; this ._rearRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyRight. body , x1: this ._rearAxisBodyRight. x , y1: this ._rearAxisBodyRight. y , x2: this ._rearAxisBodyRight. x , y2: this ._rearAxisBodyRight. y , enableLimit: true , enableMotor: false , lowerAngle: 0 , upperAngle: 0 } ) ;
// _width = 76 ; _height = 40 ; _maxTurnAngle = 15 * Globals. DEG_TO_RAD ; // _axisOffset: Number = ( _width / 4 - axisWidth ) / Globals. RATIO // _privod = FWD; // , _carBody = world. addBox ( { width : this . _width / 2 / Globals. RATIO , height : this . _height / 2 / Globals. RATIO , x : ( this . x + this . _width / 2 ) / Globals. RATIO , y : ( this . y + this . _height / 2 ) / Globals. RATIO , density: 0.48 , driction: 0.3 , restitution: 0.4 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true , skin: null , scaleSkin: true } ) ; this ._frontAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyLeft. body , x1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._frontRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyRight. body , x1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._rearAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyLeft. body , x1: this ._rearAxisBodyLeft. x , y1: this ._rearAxisBodyLeft. y , x2: this ._rearAxisBodyLeft. x , y2: this ._rearAxisBodyLeft. y , enableLimit: true , enableMotor: false , collideConnected: false , lowerAngle: 0 , upperAngle: 0 } ) ; this ._rearRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyRight. body , x1: this ._rearAxisBodyRight. x , y1: this ._rearAxisBodyRight. y , x2: this ._rearAxisBodyRight. x , y2: this ._rearAxisBodyRight. y , enableLimit: true , enableMotor: false , lowerAngle: 0 , upperAngle: 0 } ) ;
// _width = 76 ; _height = 40 ; _maxTurnAngle = 15 * Globals. DEG_TO_RAD ; // _axisOffset: Number = ( _width / 4 - axisWidth ) / Globals. RATIO // _privod = FWD; // , _carBody = world. addBox ( { width : this . _width / 2 / Globals. RATIO , height : this . _height / 2 / Globals. RATIO , x : ( this . x + this . _width / 2 ) / Globals. RATIO , y : ( this . y + this . _height / 2 ) / Globals. RATIO , density: 0.48 , driction: 0.3 , restitution: 0.4 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true , skin: null , scaleSkin: true } ) ; this ._frontAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyLeft. body , x1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._frontRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyRight. body , x1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._rearAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyLeft. body , x1: this ._rearAxisBodyLeft. x , y1: this ._rearAxisBodyLeft. y , x2: this ._rearAxisBodyLeft. x , y2: this ._rearAxisBodyLeft. y , enableLimit: true , enableMotor: false , collideConnected: false , lowerAngle: 0 , upperAngle: 0 } ) ; this ._rearRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyRight. body , x1: this ._rearAxisBodyRight. x , y1: this ._rearAxisBodyRight. y , x2: this ._rearAxisBodyRight. x , y2: this ._rearAxisBodyRight. y , enableLimit: true , enableMotor: false , lowerAngle: 0 , upperAngle: 0 } ) ;
// _width = 76 ; _height = 40 ; _maxTurnAngle = 15 * Globals. DEG_TO_RAD ; // _axisOffset: Number = ( _width / 4 - axisWidth ) / Globals. RATIO // _privod = FWD; // , _carBody = world. addBox ( { width : this . _width / 2 / Globals. RATIO , height : this . _height / 2 / Globals. RATIO , x : ( this . x + this . _width / 2 ) / Globals. RATIO , y : ( this . y + this . _height / 2 ) / Globals. RATIO , density: 0.48 , driction: 0.3 , restitution: 0.4 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true , skin: null , scaleSkin: true } ) ; this ._frontAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyLeft. body , x1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._frontRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyRight. body , x1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._rearAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyLeft. body , x1: this ._rearAxisBodyLeft. x , y1: this ._rearAxisBodyLeft. y , x2: this ._rearAxisBodyLeft. x , y2: this ._rearAxisBodyLeft. y , enableLimit: true , enableMotor: false , collideConnected: false , lowerAngle: 0 , upperAngle: 0 } ) ; this ._rearRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyRight. body , x1: this ._rearAxisBodyRight. x , y1: this ._rearAxisBodyRight. y , x2: this ._rearAxisBodyRight. x , y2: this ._rearAxisBodyRight. y , enableLimit: true , enableMotor: false , lowerAngle: 0 , upperAngle: 0 } ) ;
// _width = 76 ; _height = 40 ; _maxTurnAngle = 15 * Globals. DEG_TO_RAD ; // _axisOffset: Number = ( _width / 4 - axisWidth ) / Globals. RATIO // _privod = FWD; // , _carBody = world. addBox ( { width : this . _width / 2 / Globals. RATIO , height : this . _height / 2 / Globals. RATIO , x : ( this . x + this . _width / 2 ) / Globals. RATIO , y : ( this . y + this . _height / 2 ) / Globals. RATIO , density: 0.48 , driction: 0.3 , restitution: 0.4 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true , skin: null , scaleSkin: true } ) ; this ._frontAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyLeft. body , x1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._frontRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyRight. body , x1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._rearAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyLeft. body , x1: this ._rearAxisBodyLeft. x , y1: this ._rearAxisBodyLeft. y , x2: this ._rearAxisBodyLeft. x , y2: this ._rearAxisBodyLeft. y , enableLimit: true , enableMotor: false , collideConnected: false , lowerAngle: 0 , upperAngle: 0 } ) ; this ._rearRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyRight. body , x1: this ._rearAxisBodyRight. x , y1: this ._rearAxisBodyRight. y , x2: this ._rearAxisBodyRight. x , y2: this ._rearAxisBodyRight. y , enableLimit: true , enableMotor: false , lowerAngle: 0 , upperAngle: 0 } ) ;
// _width = 76 ; _height = 40 ; _maxTurnAngle = 15 * Globals. DEG_TO_RAD ; // _axisOffset: Number = ( _width / 4 - axisWidth ) / Globals. RATIO // _privod = FWD; // , _carBody = world. addBox ( { width : this . _width / 2 / Globals. RATIO , height : this . _height / 2 / Globals. RATIO , x : ( this . x + this . _width / 2 ) / Globals. RATIO , y : ( this . y + this . _height / 2 ) / Globals. RATIO , density: 0.48 , driction: 0.3 , restitution: 0.4 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true , skin: null , scaleSkin: true } ) ; this ._frontAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyLeft. body , x1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._frontRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyRight. body , x1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._rearAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyLeft. body , x1: this ._rearAxisBodyLeft. x , y1: this ._rearAxisBodyLeft. y , x2: this ._rearAxisBodyLeft. x , y2: this ._rearAxisBodyLeft. y , enableLimit: true , enableMotor: false , collideConnected: false , lowerAngle: 0 , upperAngle: 0 } ) ; this ._rearRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyRight. body , x1: this ._rearAxisBodyRight. x , y1: this ._rearAxisBodyRight. y , x2: this ._rearAxisBodyRight. x , y2: this ._rearAxisBodyRight. y , enableLimit: true , enableMotor: false , lowerAngle: 0 , upperAngle: 0 } ) ;
// _width = 76 ; _height = 40 ; _maxTurnAngle = 15 * Globals. DEG_TO_RAD ; // _axisOffset: Number = ( _width / 4 - axisWidth ) / Globals. RATIO // _privod = FWD; // , _carBody = world. addBox ( { width : this . _width / 2 / Globals. RATIO , height : this . _height / 2 / Globals. RATIO , x : ( this . x + this . _width / 2 ) / Globals. RATIO , y : ( this . y + this . _height / 2 ) / Globals. RATIO , density: 0.48 , driction: 0.3 , restitution: 0.4 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true , skin: null , scaleSkin: true } ) ; this ._frontAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyLeft. body , x1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._frontRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyRight. body , x1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._rearAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyLeft. body , x1: this ._rearAxisBodyLeft. x , y1: this ._rearAxisBodyLeft. y , x2: this ._rearAxisBodyLeft. x , y2: this ._rearAxisBodyLeft. y , enableLimit: true , enableMotor: false , collideConnected: false , lowerAngle: 0 , upperAngle: 0 } ) ; this ._rearRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyRight. body , x1: this ._rearAxisBodyRight. x , y1: this ._rearAxisBodyRight. y , x2: this ._rearAxisBodyRight. x , y2: this ._rearAxisBodyRight. y , enableLimit: true , enableMotor: false , lowerAngle: 0 , upperAngle: 0 } ) ;
// _width = 76 ; _height = 40 ; _maxTurnAngle = 15 * Globals. DEG_TO_RAD ; // _axisOffset: Number = ( _width / 4 - axisWidth ) / Globals. RATIO // _privod = FWD; // , _carBody = world. addBox ( { width : this . _width / 2 / Globals. RATIO , height : this . _height / 2 / Globals. RATIO , x : ( this . x + this . _width / 2 ) / Globals. RATIO , y : ( this . y + this . _height / 2 ) / Globals. RATIO , density: 0.48 , driction: 0.3 , restitution: 0.4 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true , skin: null , scaleSkin: true } ) ; this ._frontAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyLeft. body , x1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._frontRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyRight. body , x1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._rearAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyLeft. body , x1: this ._rearAxisBodyLeft. x , y1: this ._rearAxisBodyLeft. y , x2: this ._rearAxisBodyLeft. x , y2: this ._rearAxisBodyLeft. y , enableLimit: true , enableMotor: false , collideConnected: false , lowerAngle: 0 , upperAngle: 0 } ) ; this ._rearRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyRight. body , x1: this ._rearAxisBodyRight. x , y1: this ._rearAxisBodyRight. y , x2: this ._rearAxisBodyRight. x , y2: this ._rearAxisBodyRight. y , enableLimit: true , enableMotor: false , lowerAngle: 0 , upperAngle: 0 } ) ;
// _width = 76 ; _height = 40 ; _maxTurnAngle = 15 * Globals. DEG_TO_RAD ; // _axisOffset: Number = ( _width / 4 - axisWidth ) / Globals. RATIO // _privod = FWD; // , _carBody = world. addBox ( { width : this . _width / 2 / Globals. RATIO , height : this . _height / 2 / Globals. RATIO , x : ( this . x + this . _width / 2 ) / Globals. RATIO , y : ( this . y + this . _height / 2 ) / Globals. RATIO , density: 0.48 , driction: 0.3 , restitution: 0.4 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true , skin: null , scaleSkin: true } ) ; this ._frontAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyLeft. body , x1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._frontRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyRight. body , x1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._rearAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyLeft. body , x1: this ._rearAxisBodyLeft. x , y1: this ._rearAxisBodyLeft. y , x2: this ._rearAxisBodyLeft. x , y2: this ._rearAxisBodyLeft. y , enableLimit: true , enableMotor: false , collideConnected: false , lowerAngle: 0 , upperAngle: 0 } ) ; this ._rearRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyRight. body , x1: this ._rearAxisBodyRight. x , y1: this ._rearAxisBodyRight. y , x2: this ._rearAxisBodyRight. x , y2: this ._rearAxisBodyRight. y , enableLimit: true , enableMotor: false , lowerAngle: 0 , upperAngle: 0 } ) ;
// _width = 76 ; _height = 40 ; _maxTurnAngle = 15 * Globals. DEG_TO_RAD ; // _axisOffset: Number = ( _width / 4 - axisWidth ) / Globals. RATIO // _privod = FWD; // , _carBody = world. addBox ( { width : this . _width / 2 / Globals. RATIO , height : this . _height / 2 / Globals. RATIO , x : ( this . x + this . _width / 2 ) / Globals. RATIO , y : ( this . y + this . _height / 2 ) / Globals. RATIO , density: 0.48 , driction: 0.3 , restitution: 0.4 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true , skin: null , scaleSkin: true } ) ; this ._frontAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyLeft. body , x1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._frontRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyRight. body , x1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._rearAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyLeft. body , x1: this ._rearAxisBodyLeft. x , y1: this ._rearAxisBodyLeft. y , x2: this ._rearAxisBodyLeft. x , y2: this ._rearAxisBodyLeft. y , enableLimit: true , enableMotor: false , collideConnected: false , lowerAngle: 0 , upperAngle: 0 } ) ; this ._rearRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyRight. body , x1: this ._rearAxisBodyRight. x , y1: this ._rearAxisBodyRight. y , x2: this ._rearAxisBodyRight. x , y2: this ._rearAxisBodyRight. y , enableLimit: true , enableMotor: false , lowerAngle: 0 , upperAngle: 0 } ) ;
// _width = 76 ; _height = 40 ; _maxTurnAngle = 15 * Globals. DEG_TO_RAD ; // _axisOffset: Number = ( _width / 4 - axisWidth ) / Globals. RATIO // _privod = FWD; // , _carBody = world. addBox ( { width : this . _width / 2 / Globals. RATIO , height : this . _height / 2 / Globals. RATIO , x : ( this . x + this . _width / 2 ) / Globals. RATIO , y : ( this . y + this . _height / 2 ) / Globals. RATIO , density: 0.48 , driction: 0.3 , restitution: 0.4 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true , skin: null , scaleSkin: true } ) ; this ._frontAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyLeft. body , x1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._frontRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyRight. body , x1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._rearAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyLeft. body , x1: this ._rearAxisBodyLeft. x , y1: this ._rearAxisBodyLeft. y , x2: this ._rearAxisBodyLeft. x , y2: this ._rearAxisBodyLeft. y , enableLimit: true , enableMotor: false , collideConnected: false , lowerAngle: 0 , upperAngle: 0 } ) ; this ._rearRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyRight. body , x1: this ._rearAxisBodyRight. x , y1: this ._rearAxisBodyRight. y , x2: this ._rearAxisBodyRight. x , y2: this ._rearAxisBodyRight. y , enableLimit: true , enableMotor: false , lowerAngle: 0 , upperAngle: 0 } ) ;
// _width = 76 ; _height = 40 ; _maxTurnAngle = 15 * Globals. DEG_TO_RAD ; // _axisOffset: Number = ( _width / 4 - axisWidth ) / Globals. RATIO // _privod = FWD; // , _carBody = world. addBox ( { width : this . _width / 2 / Globals. RATIO , height : this . _height / 2 / Globals. RATIO , x : ( this . x + this . _width / 2 ) / Globals. RATIO , y : ( this . y + this . _height / 2 ) / Globals. RATIO , density: 0.48 , driction: 0.3 , restitution: 0.4 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true , skin: null , scaleSkin: true } ) ; this ._frontAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyLeft. body , x1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._frontRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyRight. body , x1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._rearAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyLeft. body , x1: this ._rearAxisBodyLeft. x , y1: this ._rearAxisBodyLeft. y , x2: this ._rearAxisBodyLeft. x , y2: this ._rearAxisBodyLeft. y , enableLimit: true , enableMotor: false , collideConnected: false , lowerAngle: 0 , upperAngle: 0 } ) ; this ._rearRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyRight. body , x1: this ._rearAxisBodyRight. x , y1: this ._rearAxisBodyRight. y , x2: this ._rearAxisBodyRight. x , y2: this ._rearAxisBodyRight. y , enableLimit: true , enableMotor: false , lowerAngle: 0 , upperAngle: 0 } ) ;
// _width = 76 ; _height = 40 ; _maxTurnAngle = 15 * Globals. DEG_TO_RAD ; // _axisOffset: Number = ( _width / 4 - axisWidth ) / Globals. RATIO // _privod = FWD; // , _carBody = world. addBox ( { width : this . _width / 2 / Globals. RATIO , height : this . _height / 2 / Globals. RATIO , x : ( this . x + this . _width / 2 ) / Globals. RATIO , y : ( this . y + this . _height / 2 ) / Globals. RATIO , density: 0.48 , driction: 0.3 , restitution: 0.4 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true , skin: null , scaleSkin: true } ) ; this ._frontAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyLeft. body , x1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._frontRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyRight. body , x1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._rearAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyLeft. body , x1: this ._rearAxisBodyLeft. x , y1: this ._rearAxisBodyLeft. y , x2: this ._rearAxisBodyLeft. x , y2: this ._rearAxisBodyLeft. y , enableLimit: true , enableMotor: false , collideConnected: false , lowerAngle: 0 , upperAngle: 0 } ) ; this ._rearRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyRight. body , x1: this ._rearAxisBodyRight. x , y1: this ._rearAxisBodyRight. y , x2: this ._rearAxisBodyRight. x , y2: this ._rearAxisBodyRight. y , enableLimit: true , enableMotor: false , lowerAngle: 0 , upperAngle: 0 } ) ;
// _width = 76 ; _height = 40 ; _maxTurnAngle = 15 * Globals. DEG_TO_RAD ; // _axisOffset: Number = ( _width / 4 - axisWidth ) / Globals. RATIO // _privod = FWD; // , _carBody = world. addBox ( { width : this . _width / 2 / Globals. RATIO , height : this . _height / 2 / Globals. RATIO , x : ( this . x + this . _width / 2 ) / Globals. RATIO , y : ( this . y + this . _height / 2 ) / Globals. RATIO , density: 0.48 , driction: 0.3 , restitution: 0.4 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true , skin: null , scaleSkin: true } ) ; this ._frontAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyLeft. body , x1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._frontRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyRight. body , x1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._rearAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyLeft. body , x1: this ._rearAxisBodyLeft. x , y1: this ._rearAxisBodyLeft. y , x2: this ._rearAxisBodyLeft. x , y2: this ._rearAxisBodyLeft. y , enableLimit: true , enableMotor: false , collideConnected: false , lowerAngle: 0 , upperAngle: 0 } ) ; this ._rearRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyRight. body , x1: this ._rearAxisBodyRight. x , y1: this ._rearAxisBodyRight. y , x2: this ._rearAxisBodyRight. x , y2: this ._rearAxisBodyRight. y , enableLimit: true , enableMotor: false , lowerAngle: 0 , upperAngle: 0 } ) ;
// _width = 76 ; _height = 40 ; _maxTurnAngle = 15 * Globals. DEG_TO_RAD ; // _axisOffset: Number = ( _width / 4 - axisWidth ) / Globals. RATIO // _privod = FWD; // , _carBody = world. addBox ( { width : this . _width / 2 / Globals. RATIO , height : this . _height / 2 / Globals. RATIO , x : ( this . x + this . _width / 2 ) / Globals. RATIO , y : ( this . y + this . _height / 2 ) / Globals. RATIO , density: 0.48 , driction: 0.3 , restitution: 0.4 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true , skin: null , scaleSkin: true } ) ; this ._frontAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyLeft. body , x1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._frontRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyRight. body , x1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._rearAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyLeft. body , x1: this ._rearAxisBodyLeft. x , y1: this ._rearAxisBodyLeft. y , x2: this ._rearAxisBodyLeft. x , y2: this ._rearAxisBodyLeft. y , enableLimit: true , enableMotor: false , collideConnected: false , lowerAngle: 0 , upperAngle: 0 } ) ; this ._rearRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyRight. body , x1: this ._rearAxisBodyRight. x , y1: this ._rearAxisBodyRight. y , x2: this ._rearAxisBodyRight. x , y2: this ._rearAxisBodyRight. y , enableLimit: true , enableMotor: false , lowerAngle: 0 , upperAngle: 0 } ) ;
// _width = 76 ; _height = 40 ; _maxTurnAngle = 15 * Globals. DEG_TO_RAD ; // _axisOffset: Number = ( _width / 4 - axisWidth ) / Globals. RATIO // _privod = FWD; // , _carBody = world. addBox ( { width : this . _width / 2 / Globals. RATIO , height : this . _height / 2 / Globals. RATIO , x : ( this . x + this . _width / 2 ) / Globals. RATIO , y : ( this . y + this . _height / 2 ) / Globals. RATIO , density: 0.48 , driction: 0.3 , restitution: 0.4 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true , skin: null , scaleSkin: true } ) ; this ._frontAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyLeft. body , x1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._frontRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyRight. body , x1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._rearAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyLeft. body , x1: this ._rearAxisBodyLeft. x , y1: this ._rearAxisBodyLeft. y , x2: this ._rearAxisBodyLeft. x , y2: this ._rearAxisBodyLeft. y , enableLimit: true , enableMotor: false , collideConnected: false , lowerAngle: 0 , upperAngle: 0 } ) ; this ._rearRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyRight. body , x1: this ._rearAxisBodyRight. x , y1: this ._rearAxisBodyRight. y , x2: this ._rearAxisBodyRight. x , y2: this ._rearAxisBodyRight. y , enableLimit: true , enableMotor: false , lowerAngle: 0 , upperAngle: 0 } ) ;
さて、私たちは車を作りました。 その外観は上の図とほぼ同じですが、時計回りに90%回転するだけです。
今、私たちには主な仕事があります:私たちの車に運転を教えることです。 駆動効果を達成するために、 ApplyForce(..)を必要なホイールに適用します(前輪駆動-前輪。全輪駆動-全輪)
車の物理を計算して制御するには、世界が更新されるたびに、 accelerate()を使用して呼び出します。
stage . addEventListener ( KeyboardEvent. KEY_DOWN , keyDownList ) ; stage . addEventListener ( KeyboardEvent. KEY_UP , keyUpList ) ; world. addEventListener ( QuickBox2D. STEP ,onStep ) ; ... var bup: Boolean ; var bdown: Boolean ; var bleft: Boolean ; var bright: Boolean ; function keyDownList ( e :KeyboardEvent ) : void { if ( e . keyCode == Keyboard. UP ) { bup = true ; } if ( e . keyCode == Keyboard. LEFT ) { bleft = true ; } if ( e . keyCode == Keyboard. DOWN ) { bdown = true ; } if ( e . keyCode == Keyboard. RIGHT ) { bright = true ; } } ; function keyUpList ( e :KeyboardEvent ) : void { if ( e . keyCode == Keyboard. UP ) { bup = false ; } ; if ( e . keyCode == Keyboard. LEFT ) { bleft = false ; } ; if ( e . keyCode == Keyboard. DOWN ) { bdown = false ; } ; if ( e . keyCode == Keyboard. RIGHT ) { bright = false ; } ; } ; function onStep ( evt:Event ) : void { car. accelerate ( ) ; if ( bup ) { car. drive = 1 } ; if ( bdown ) { car. drive =- 1 } ; if ( ! bup && ! bdown ) ( car. drive = 0 ) ; if ( bleft ) { car. steer =- 1 } ; if ( bright ) { car. steer = 1 } ; if ( ! bleft && ! bright ) { car. steer = 0 } ; } ;
stage . addEventListener ( KeyboardEvent. KEY_DOWN , keyDownList ) ; stage . addEventListener ( KeyboardEvent. KEY_UP , keyUpList ) ; world. addEventListener ( QuickBox2D. STEP ,onStep ) ; ... var bup: Boolean ; var bdown: Boolean ; var bleft: Boolean ; var bright: Boolean ; function keyDownList ( e :KeyboardEvent ) : void { if ( e . keyCode == Keyboard. UP ) { bup = true ; } if ( e . keyCode == Keyboard. LEFT ) { bleft = true ; } if ( e . keyCode == Keyboard. DOWN ) { bdown = true ; } if ( e . keyCode == Keyboard. RIGHT ) { bright = true ; } } ; function keyUpList ( e :KeyboardEvent ) : void { if ( e . keyCode == Keyboard. UP ) { bup = false ; } ; if ( e . keyCode == Keyboard. LEFT ) { bleft = false ; } ; if ( e . keyCode == Keyboard. DOWN ) { bdown = false ; } ; if ( e . keyCode == Keyboard. RIGHT ) { bright = false ; } ; } ; function onStep ( evt:Event ) : void { car. accelerate ( ) ; if ( bup ) { car. drive = 1 } ; if ( bdown ) { car. drive =- 1 } ; if ( ! bup && ! bdown ) ( car. drive = 0 ) ; if ( bleft ) { car. steer =- 1 } ; if ( bright ) { car. steer = 1 } ; if ( ! bleft && ! bright ) { car. steer = 0 } ; } ;
stage . addEventListener ( KeyboardEvent. KEY_DOWN , keyDownList ) ; stage . addEventListener ( KeyboardEvent. KEY_UP , keyUpList ) ; world. addEventListener ( QuickBox2D. STEP ,onStep ) ; ... var bup: Boolean ; var bdown: Boolean ; var bleft: Boolean ; var bright: Boolean ; function keyDownList ( e :KeyboardEvent ) : void { if ( e . keyCode == Keyboard. UP ) { bup = true ; } if ( e . keyCode == Keyboard. LEFT ) { bleft = true ; } if ( e . keyCode == Keyboard. DOWN ) { bdown = true ; } if ( e . keyCode == Keyboard. RIGHT ) { bright = true ; } } ; function keyUpList ( e :KeyboardEvent ) : void { if ( e . keyCode == Keyboard. UP ) { bup = false ; } ; if ( e . keyCode == Keyboard. LEFT ) { bleft = false ; } ; if ( e . keyCode == Keyboard. DOWN ) { bdown = false ; } ; if ( e . keyCode == Keyboard. RIGHT ) { bright = false ; } ; } ; function onStep ( evt:Event ) : void { car. accelerate ( ) ; if ( bup ) { car. drive = 1 } ; if ( bdown ) { car. drive =- 1 } ; if ( ! bup && ! bdown ) ( car. drive = 0 ) ; if ( bleft ) { car. steer =- 1 } ; if ( bright ) { car. steer = 1 } ; if ( ! bleft && ! bright ) { car. steer = 0 } ; } ;
stage . addEventListener ( KeyboardEvent. KEY_DOWN , keyDownList ) ; stage . addEventListener ( KeyboardEvent. KEY_UP , keyUpList ) ; world. addEventListener ( QuickBox2D. STEP ,onStep ) ; ... var bup: Boolean ; var bdown: Boolean ; var bleft: Boolean ; var bright: Boolean ; function keyDownList ( e :KeyboardEvent ) : void { if ( e . keyCode == Keyboard. UP ) { bup = true ; } if ( e . keyCode == Keyboard. LEFT ) { bleft = true ; } if ( e . keyCode == Keyboard. DOWN ) { bdown = true ; } if ( e . keyCode == Keyboard. RIGHT ) { bright = true ; } } ; function keyUpList ( e :KeyboardEvent ) : void { if ( e . keyCode == Keyboard. UP ) { bup = false ; } ; if ( e . keyCode == Keyboard. LEFT ) { bleft = false ; } ; if ( e . keyCode == Keyboard. DOWN ) { bdown = false ; } ; if ( e . keyCode == Keyboard. RIGHT ) { bright = false ; } ; } ; function onStep ( evt:Event ) : void { car. accelerate ( ) ; if ( bup ) { car. drive = 1 } ; if ( bdown ) { car. drive =- 1 } ; if ( ! bup && ! bdown ) ( car. drive = 0 ) ; if ( bleft ) { car. steer =- 1 } ; if ( bright ) { car. steer = 1 } ; if ( ! bleft && ! bright ) { car. steer = 0 } ; } ;
stage . addEventListener ( KeyboardEvent. KEY_DOWN , keyDownList ) ; stage . addEventListener ( KeyboardEvent. KEY_UP , keyUpList ) ; world. addEventListener ( QuickBox2D. STEP ,onStep ) ; ... var bup: Boolean ; var bdown: Boolean ; var bleft: Boolean ; var bright: Boolean ; function keyDownList ( e :KeyboardEvent ) : void { if ( e . keyCode == Keyboard. UP ) { bup = true ; } if ( e . keyCode == Keyboard. LEFT ) { bleft = true ; } if ( e . keyCode == Keyboard. DOWN ) { bdown = true ; } if ( e . keyCode == Keyboard. RIGHT ) { bright = true ; } } ; function keyUpList ( e :KeyboardEvent ) : void { if ( e . keyCode == Keyboard. UP ) { bup = false ; } ; if ( e . keyCode == Keyboard. LEFT ) { bleft = false ; } ; if ( e . keyCode == Keyboard. DOWN ) { bdown = false ; } ; if ( e . keyCode == Keyboard. RIGHT ) { bright = false ; } ; } ; function onStep ( evt:Event ) : void { car. accelerate ( ) ; if ( bup ) { car. drive = 1 } ; if ( bdown ) { car. drive =- 1 } ; if ( ! bup && ! bdown ) ( car. drive = 0 ) ; if ( bleft ) { car. steer =- 1 } ; if ( bright ) { car. steer = 1 } ; if ( ! bleft && ! bright ) { car. steer = 0 } ; } ;
stage . addEventListener ( KeyboardEvent. KEY_DOWN , keyDownList ) ; stage . addEventListener ( KeyboardEvent. KEY_UP , keyUpList ) ; world. addEventListener ( QuickBox2D. STEP ,onStep ) ; ... var bup: Boolean ; var bdown: Boolean ; var bleft: Boolean ; var bright: Boolean ; function keyDownList ( e :KeyboardEvent ) : void { if ( e . keyCode == Keyboard. UP ) { bup = true ; } if ( e . keyCode == Keyboard. LEFT ) { bleft = true ; } if ( e . keyCode == Keyboard. DOWN ) { bdown = true ; } if ( e . keyCode == Keyboard. RIGHT ) { bright = true ; } } ; function keyUpList ( e :KeyboardEvent ) : void { if ( e . keyCode == Keyboard. UP ) { bup = false ; } ; if ( e . keyCode == Keyboard. LEFT ) { bleft = false ; } ; if ( e . keyCode == Keyboard. DOWN ) { bdown = false ; } ; if ( e . keyCode == Keyboard. RIGHT ) { bright = false ; } ; } ; function onStep ( evt:Event ) : void { car. accelerate ( ) ; if ( bup ) { car. drive = 1 } ; if ( bdown ) { car. drive =- 1 } ; if ( ! bup && ! bdown ) ( car. drive = 0 ) ; if ( bleft ) { car. steer =- 1 } ; if ( bright ) { car. steer = 1 } ; if ( ! bleft && ! bright ) { car. steer = 0 } ; } ;
stage . addEventListener ( KeyboardEvent. KEY_DOWN , keyDownList ) ; stage . addEventListener ( KeyboardEvent. KEY_UP , keyUpList ) ; world. addEventListener ( QuickBox2D. STEP ,onStep ) ; ... var bup: Boolean ; var bdown: Boolean ; var bleft: Boolean ; var bright: Boolean ; function keyDownList ( e :KeyboardEvent ) : void { if ( e . keyCode == Keyboard. UP ) { bup = true ; } if ( e . keyCode == Keyboard. LEFT ) { bleft = true ; } if ( e . keyCode == Keyboard. DOWN ) { bdown = true ; } if ( e . keyCode == Keyboard. RIGHT ) { bright = true ; } } ; function keyUpList ( e :KeyboardEvent ) : void { if ( e . keyCode == Keyboard. UP ) { bup = false ; } ; if ( e . keyCode == Keyboard. LEFT ) { bleft = false ; } ; if ( e . keyCode == Keyboard. DOWN ) { bdown = false ; } ; if ( e . keyCode == Keyboard. RIGHT ) { bright = false ; } ; } ; function onStep ( evt:Event ) : void { car. accelerate ( ) ; if ( bup ) { car. drive = 1 } ; if ( bdown ) { car. drive =- 1 } ; if ( ! bup && ! bdown ) ( car. drive = 0 ) ; if ( bleft ) { car. steer =- 1 } ; if ( bright ) { car. steer = 1 } ; if ( ! bleft && ! bright ) { car. steer = 0 } ; } ;
stage . addEventListener ( KeyboardEvent. KEY_DOWN , keyDownList ) ; stage . addEventListener ( KeyboardEvent. KEY_UP , keyUpList ) ; world. addEventListener ( QuickBox2D. STEP ,onStep ) ; ... var bup: Boolean ; var bdown: Boolean ; var bleft: Boolean ; var bright: Boolean ; function keyDownList ( e :KeyboardEvent ) : void { if ( e . keyCode == Keyboard. UP ) { bup = true ; } if ( e . keyCode == Keyboard. LEFT ) { bleft = true ; } if ( e . keyCode == Keyboard. DOWN ) { bdown = true ; } if ( e . keyCode == Keyboard. RIGHT ) { bright = true ; } } ; function keyUpList ( e :KeyboardEvent ) : void { if ( e . keyCode == Keyboard. UP ) { bup = false ; } ; if ( e . keyCode == Keyboard. LEFT ) { bleft = false ; } ; if ( e . keyCode == Keyboard. DOWN ) { bdown = false ; } ; if ( e . keyCode == Keyboard. RIGHT ) { bright = false ; } ; } ; function onStep ( evt:Event ) : void { car. accelerate ( ) ; if ( bup ) { car. drive = 1 } ; if ( bdown ) { car. drive =- 1 } ; if ( ! bup && ! bdown ) ( car. drive = 0 ) ; if ( bleft ) { car. steer =- 1 } ; if ( bright ) { car. steer = 1 } ; if ( ! bleft && ! bright ) { car. steer = 0 } ; } ;
stage . addEventListener ( KeyboardEvent. KEY_DOWN , keyDownList ) ; stage . addEventListener ( KeyboardEvent. KEY_UP , keyUpList ) ; world. addEventListener ( QuickBox2D. STEP ,onStep ) ; ... var bup: Boolean ; var bdown: Boolean ; var bleft: Boolean ; var bright: Boolean ; function keyDownList ( e :KeyboardEvent ) : void { if ( e . keyCode == Keyboard. UP ) { bup = true ; } if ( e . keyCode == Keyboard. LEFT ) { bleft = true ; } if ( e . keyCode == Keyboard. DOWN ) { bdown = true ; } if ( e . keyCode == Keyboard. RIGHT ) { bright = true ; } } ; function keyUpList ( e :KeyboardEvent ) : void { if ( e . keyCode == Keyboard. UP ) { bup = false ; } ; if ( e . keyCode == Keyboard. LEFT ) { bleft = false ; } ; if ( e . keyCode == Keyboard. DOWN ) { bdown = false ; } ; if ( e . keyCode == Keyboard. RIGHT ) { bright = false ; } ; } ; function onStep ( evt:Event ) : void { car. accelerate ( ) ; if ( bup ) { car. drive = 1 } ; if ( bdown ) { car. drive =- 1 } ; if ( ! bup && ! bdown ) ( car. drive = 0 ) ; if ( bleft ) { car. steer =- 1 } ; if ( bright ) { car. steer = 1 } ; if ( ! bleft && ! bright ) { car. steer = 0 } ; } ;
stage . addEventListener ( KeyboardEvent. KEY_DOWN , keyDownList ) ; stage . addEventListener ( KeyboardEvent. KEY_UP , keyUpList ) ; world. addEventListener ( QuickBox2D. STEP ,onStep ) ; ... var bup: Boolean ; var bdown: Boolean ; var bleft: Boolean ; var bright: Boolean ; function keyDownList ( e :KeyboardEvent ) : void { if ( e . keyCode == Keyboard. UP ) { bup = true ; } if ( e . keyCode == Keyboard. LEFT ) { bleft = true ; } if ( e . keyCode == Keyboard. DOWN ) { bdown = true ; } if ( e . keyCode == Keyboard. RIGHT ) { bright = true ; } } ; function keyUpList ( e :KeyboardEvent ) : void { if ( e . keyCode == Keyboard. UP ) { bup = false ; } ; if ( e . keyCode == Keyboard. LEFT ) { bleft = false ; } ; if ( e . keyCode == Keyboard. DOWN ) { bdown = false ; } ; if ( e . keyCode == Keyboard. RIGHT ) { bright = false ; } ; } ; function onStep ( evt:Event ) : void { car. accelerate ( ) ; if ( bup ) { car. drive = 1 } ; if ( bdown ) { car. drive =- 1 } ; if ( ! bup && ! bdown ) ( car. drive = 0 ) ; if ( bleft ) { car. steer =- 1 } ; if ( bright ) { car. steer = 1 } ; if ( ! bleft && ! bright ) { car. steer = 0 } ; } ;
stage . addEventListener ( KeyboardEvent. KEY_DOWN , keyDownList ) ; stage . addEventListener ( KeyboardEvent. KEY_UP , keyUpList ) ; world. addEventListener ( QuickBox2D. STEP ,onStep ) ; ... var bup: Boolean ; var bdown: Boolean ; var bleft: Boolean ; var bright: Boolean ; function keyDownList ( e :KeyboardEvent ) : void { if ( e . keyCode == Keyboard. UP ) { bup = true ; } if ( e . keyCode == Keyboard. LEFT ) { bleft = true ; } if ( e . keyCode == Keyboard. DOWN ) { bdown = true ; } if ( e . keyCode == Keyboard. RIGHT ) { bright = true ; } } ; function keyUpList ( e :KeyboardEvent ) : void { if ( e . keyCode == Keyboard. UP ) { bup = false ; } ; if ( e . keyCode == Keyboard. LEFT ) { bleft = false ; } ; if ( e . keyCode == Keyboard. DOWN ) { bdown = false ; } ; if ( e . keyCode == Keyboard. RIGHT ) { bright = false ; } ; } ; function onStep ( evt:Event ) : void { car. accelerate ( ) ; if ( bup ) { car. drive = 1 } ; if ( bdown ) { car. drive =- 1 } ; if ( ! bup && ! bdown ) ( car. drive = 0 ) ; if ( bleft ) { car. steer =- 1 } ; if ( bright ) { car. steer = 1 } ; if ( ! bleft && ! bright ) { car. steer = 0 } ; } ;
stage . addEventListener ( KeyboardEvent. KEY_DOWN , keyDownList ) ; stage . addEventListener ( KeyboardEvent. KEY_UP , keyUpList ) ; world. addEventListener ( QuickBox2D. STEP ,onStep ) ; ... var bup: Boolean ; var bdown: Boolean ; var bleft: Boolean ; var bright: Boolean ; function keyDownList ( e :KeyboardEvent ) : void { if ( e . keyCode == Keyboard. UP ) { bup = true ; } if ( e . keyCode == Keyboard. LEFT ) { bleft = true ; } if ( e . keyCode == Keyboard. DOWN ) { bdown = true ; } if ( e . keyCode == Keyboard. RIGHT ) { bright = true ; } } ; function keyUpList ( e :KeyboardEvent ) : void { if ( e . keyCode == Keyboard. UP ) { bup = false ; } ; if ( e . keyCode == Keyboard. LEFT ) { bleft = false ; } ; if ( e . keyCode == Keyboard. DOWN ) { bdown = false ; } ; if ( e . keyCode == Keyboard. RIGHT ) { bright = false ; } ; } ; function onStep ( evt:Event ) : void { car. accelerate ( ) ; if ( bup ) { car. drive = 1 } ; if ( bdown ) { car. drive =- 1 } ; if ( ! bup && ! bdown ) ( car. drive = 0 ) ; if ( bleft ) { car. steer =- 1 } ; if ( bright ) { car. steer = 1 } ; if ( ! bleft && ! bright ) { car. steer = 0 } ; } ;
stage . addEventListener ( KeyboardEvent. KEY_DOWN , keyDownList ) ; stage . addEventListener ( KeyboardEvent. KEY_UP , keyUpList ) ; world. addEventListener ( QuickBox2D. STEP ,onStep ) ; ... var bup: Boolean ; var bdown: Boolean ; var bleft: Boolean ; var bright: Boolean ; function keyDownList ( e :KeyboardEvent ) : void { if ( e . keyCode == Keyboard. UP ) { bup = true ; } if ( e . keyCode == Keyboard. LEFT ) { bleft = true ; } if ( e . keyCode == Keyboard. DOWN ) { bdown = true ; } if ( e . keyCode == Keyboard. RIGHT ) { bright = true ; } } ; function keyUpList ( e :KeyboardEvent ) : void { if ( e . keyCode == Keyboard. UP ) { bup = false ; } ; if ( e . keyCode == Keyboard. LEFT ) { bleft = false ; } ; if ( e . keyCode == Keyboard. DOWN ) { bdown = false ; } ; if ( e . keyCode == Keyboard. RIGHT ) { bright = false ; } ; } ; function onStep ( evt:Event ) : void { car. accelerate ( ) ; if ( bup ) { car. drive = 1 } ; if ( bdown ) { car. drive =- 1 } ; if ( ! bup && ! bdown ) ( car. drive = 0 ) ; if ( bleft ) { car. steer =- 1 } ; if ( bright ) { car. steer = 1 } ; if ( ! bleft && ! bright ) { car. steer = 0 } ; } ;
stage . addEventListener ( KeyboardEvent. KEY_DOWN , keyDownList ) ; stage . addEventListener ( KeyboardEvent. KEY_UP , keyUpList ) ; world. addEventListener ( QuickBox2D. STEP ,onStep ) ; ... var bup: Boolean ; var bdown: Boolean ; var bleft: Boolean ; var bright: Boolean ; function keyDownList ( e :KeyboardEvent ) : void { if ( e . keyCode == Keyboard. UP ) { bup = true ; } if ( e . keyCode == Keyboard. LEFT ) { bleft = true ; } if ( e . keyCode == Keyboard. DOWN ) { bdown = true ; } if ( e . keyCode == Keyboard. RIGHT ) { bright = true ; } } ; function keyUpList ( e :KeyboardEvent ) : void { if ( e . keyCode == Keyboard. UP ) { bup = false ; } ; if ( e . keyCode == Keyboard. LEFT ) { bleft = false ; } ; if ( e . keyCode == Keyboard. DOWN ) { bdown = false ; } ; if ( e . keyCode == Keyboard. RIGHT ) { bright = false ; } ; } ; function onStep ( evt:Event ) : void { car. accelerate ( ) ; if ( bup ) { car. drive = 1 } ; if ( bdown ) { car. drive =- 1 } ; if ( ! bup && ! bdown ) ( car. drive = 0 ) ; if ( bleft ) { car. steer =- 1 } ; if ( bright ) { car. steer = 1 } ; if ( ! bleft && ! bright ) { car. steer = 0 } ; } ;
stage . addEventListener ( KeyboardEvent. KEY_DOWN , keyDownList ) ; stage . addEventListener ( KeyboardEvent. KEY_UP , keyUpList ) ; world. addEventListener ( QuickBox2D. STEP ,onStep ) ; ... var bup: Boolean ; var bdown: Boolean ; var bleft: Boolean ; var bright: Boolean ; function keyDownList ( e :KeyboardEvent ) : void { if ( e . keyCode == Keyboard. UP ) { bup = true ; } if ( e . keyCode == Keyboard. LEFT ) { bleft = true ; } if ( e . keyCode == Keyboard. DOWN ) { bdown = true ; } if ( e . keyCode == Keyboard. RIGHT ) { bright = true ; } } ; function keyUpList ( e :KeyboardEvent ) : void { if ( e . keyCode == Keyboard. UP ) { bup = false ; } ; if ( e . keyCode == Keyboard. LEFT ) { bleft = false ; } ; if ( e . keyCode == Keyboard. DOWN ) { bdown = false ; } ; if ( e . keyCode == Keyboard. RIGHT ) { bright = false ; } ; } ; function onStep ( evt:Event ) : void { car. accelerate ( ) ; if ( bup ) { car. drive = 1 } ; if ( bdown ) { car. drive =- 1 } ; if ( ! bup && ! bdown ) ( car. drive = 0 ) ; if ( bleft ) { car. steer =- 1 } ; if ( bright ) { car. steer = 1 } ; if ( ! bleft && ! bright ) { car. steer = 0 } ; } ;
stage . addEventListener ( KeyboardEvent. KEY_DOWN , keyDownList ) ; stage . addEventListener ( KeyboardEvent. KEY_UP , keyUpList ) ; world. addEventListener ( QuickBox2D. STEP ,onStep ) ; ... var bup: Boolean ; var bdown: Boolean ; var bleft: Boolean ; var bright: Boolean ; function keyDownList ( e :KeyboardEvent ) : void { if ( e . keyCode == Keyboard. UP ) { bup = true ; } if ( e . keyCode == Keyboard. LEFT ) { bleft = true ; } if ( e . keyCode == Keyboard. DOWN ) { bdown = true ; } if ( e . keyCode == Keyboard. RIGHT ) { bright = true ; } } ; function keyUpList ( e :KeyboardEvent ) : void { if ( e . keyCode == Keyboard. UP ) { bup = false ; } ; if ( e . keyCode == Keyboard. LEFT ) { bleft = false ; } ; if ( e . keyCode == Keyboard. DOWN ) { bdown = false ; } ; if ( e . keyCode == Keyboard. RIGHT ) { bright = false ; } ; } ; function onStep ( evt:Event ) : void { car. accelerate ( ) ; if ( bup ) { car. drive = 1 } ; if ( bdown ) { car. drive =- 1 } ; if ( ! bup && ! bdown ) ( car. drive = 0 ) ; if ( bleft ) { car. steer =- 1 } ; if ( bright ) { car. steer = 1 } ; if ( ! bleft && ! bright ) { car. steer = 0 } ; } ;
stage . addEventListener ( KeyboardEvent. KEY_DOWN , keyDownList ) ; stage . addEventListener ( KeyboardEvent. KEY_UP , keyUpList ) ; world. addEventListener ( QuickBox2D. STEP ,onStep ) ; ... var bup: Boolean ; var bdown: Boolean ; var bleft: Boolean ; var bright: Boolean ; function keyDownList ( e :KeyboardEvent ) : void { if ( e . keyCode == Keyboard. UP ) { bup = true ; } if ( e . keyCode == Keyboard. LEFT ) { bleft = true ; } if ( e . keyCode == Keyboard. DOWN ) { bdown = true ; } if ( e . keyCode == Keyboard. RIGHT ) { bright = true ; } } ; function keyUpList ( e :KeyboardEvent ) : void { if ( e . keyCode == Keyboard. UP ) { bup = false ; } ; if ( e . keyCode == Keyboard. LEFT ) { bleft = false ; } ; if ( e . keyCode == Keyboard. DOWN ) { bdown = false ; } ; if ( e . keyCode == Keyboard. RIGHT ) { bright = false ; } ; } ; function onStep ( evt:Event ) : void { car. accelerate ( ) ; if ( bup ) { car. drive = 1 } ; if ( bdown ) { car. drive =- 1 } ; if ( ! bup && ! bdown ) ( car. drive = 0 ) ; if ( bleft ) { car. steer =- 1 } ; if ( bright ) { car. steer = 1 } ; if ( ! bleft && ! bright ) { car. steer = 0 } ; } ;
stage . addEventListener ( KeyboardEvent. KEY_DOWN , keyDownList ) ; stage . addEventListener ( KeyboardEvent. KEY_UP , keyUpList ) ; world. addEventListener ( QuickBox2D. STEP ,onStep ) ; ... var bup: Boolean ; var bdown: Boolean ; var bleft: Boolean ; var bright: Boolean ; function keyDownList ( e :KeyboardEvent ) : void { if ( e . keyCode == Keyboard. UP ) { bup = true ; } if ( e . keyCode == Keyboard. LEFT ) { bleft = true ; } if ( e . keyCode == Keyboard. DOWN ) { bdown = true ; } if ( e . keyCode == Keyboard. RIGHT ) { bright = true ; } } ; function keyUpList ( e :KeyboardEvent ) : void { if ( e . keyCode == Keyboard. UP ) { bup = false ; } ; if ( e . keyCode == Keyboard. LEFT ) { bleft = false ; } ; if ( e . keyCode == Keyboard. DOWN ) { bdown = false ; } ; if ( e . keyCode == Keyboard. RIGHT ) { bright = false ; } ; } ; function onStep ( evt:Event ) : void { car. accelerate ( ) ; if ( bup ) { car. drive = 1 } ; if ( bdown ) { car. drive =- 1 } ; if ( ! bup && ! bdown ) ( car. drive = 0 ) ; if ( bleft ) { car. steer =- 1 } ; if ( bright ) { car. steer = 1 } ; if ( ! bleft && ! bright ) { car. steer = 0 } ; } ;
stage . addEventListener ( KeyboardEvent. KEY_DOWN , keyDownList ) ; stage . addEventListener ( KeyboardEvent. KEY_UP , keyUpList ) ; world. addEventListener ( QuickBox2D. STEP ,onStep ) ; ... var bup: Boolean ; var bdown: Boolean ; var bleft: Boolean ; var bright: Boolean ; function keyDownList ( e :KeyboardEvent ) : void { if ( e . keyCode == Keyboard. UP ) { bup = true ; } if ( e . keyCode == Keyboard. LEFT ) { bleft = true ; } if ( e . keyCode == Keyboard. DOWN ) { bdown = true ; } if ( e . keyCode == Keyboard. RIGHT ) { bright = true ; } } ; function keyUpList ( e :KeyboardEvent ) : void { if ( e . keyCode == Keyboard. UP ) { bup = false ; } ; if ( e . keyCode == Keyboard. LEFT ) { bleft = false ; } ; if ( e . keyCode == Keyboard. DOWN ) { bdown = false ; } ; if ( e . keyCode == Keyboard. RIGHT ) { bright = false ; } ; } ; function onStep ( evt:Event ) : void { car. accelerate ( ) ; if ( bup ) { car. drive = 1 } ; if ( bdown ) { car. drive =- 1 } ; if ( ! bup && ! bdown ) ( car. drive = 0 ) ; if ( bleft ) { car. steer =- 1 } ; if ( bright ) { car. steer = 1 } ; if ( ! bleft && ! bright ) { car. steer = 0 } ; } ;
stage . addEventListener ( KeyboardEvent. KEY_DOWN , keyDownList ) ; stage . addEventListener ( KeyboardEvent. KEY_UP , keyUpList ) ; world. addEventListener ( QuickBox2D. STEP ,onStep ) ; ... var bup: Boolean ; var bdown: Boolean ; var bleft: Boolean ; var bright: Boolean ; function keyDownList ( e :KeyboardEvent ) : void { if ( e . keyCode == Keyboard. UP ) { bup = true ; } if ( e . keyCode == Keyboard. LEFT ) { bleft = true ; } if ( e . keyCode == Keyboard. DOWN ) { bdown = true ; } if ( e . keyCode == Keyboard. RIGHT ) { bright = true ; } } ; function keyUpList ( e :KeyboardEvent ) : void { if ( e . keyCode == Keyboard. UP ) { bup = false ; } ; if ( e . keyCode == Keyboard. LEFT ) { bleft = false ; } ; if ( e . keyCode == Keyboard. DOWN ) { bdown = false ; } ; if ( e . keyCode == Keyboard. RIGHT ) { bright = false ; } ; } ; function onStep ( evt:Event ) : void { car. accelerate ( ) ; if ( bup ) { car. drive = 1 } ; if ( bdown ) { car. drive =- 1 } ; if ( ! bup && ! bdown ) ( car. drive = 0 ) ; if ( bleft ) { car. steer =- 1 } ; if ( bright ) { car. steer = 1 } ; if ( ! bleft && ! bright ) { car. steer = 0 } ; } ;
stage . addEventListener ( KeyboardEvent. KEY_DOWN , keyDownList ) ; stage . addEventListener ( KeyboardEvent. KEY_UP , keyUpList ) ; world. addEventListener ( QuickBox2D. STEP ,onStep ) ; ... var bup: Boolean ; var bdown: Boolean ; var bleft: Boolean ; var bright: Boolean ; function keyDownList ( e :KeyboardEvent ) : void { if ( e . keyCode == Keyboard. UP ) { bup = true ; } if ( e . keyCode == Keyboard. LEFT ) { bleft = true ; } if ( e . keyCode == Keyboard. DOWN ) { bdown = true ; } if ( e . keyCode == Keyboard. RIGHT ) { bright = true ; } } ; function keyUpList ( e :KeyboardEvent ) : void { if ( e . keyCode == Keyboard. UP ) { bup = false ; } ; if ( e . keyCode == Keyboard. LEFT ) { bleft = false ; } ; if ( e . keyCode == Keyboard. DOWN ) { bdown = false ; } ; if ( e . keyCode == Keyboard. RIGHT ) { bright = false ; } ; } ; function onStep ( evt:Event ) : void { car. accelerate ( ) ; if ( bup ) { car. drive = 1 } ; if ( bdown ) { car. drive =- 1 } ; if ( ! bup && ! bdown ) ( car. drive = 0 ) ; if ( bleft ) { car. steer =- 1 } ; if ( bright ) { car. steer = 1 } ; if ( ! bleft && ! bright ) { car. steer = 0 } ; } ;
stage . addEventListener ( KeyboardEvent. KEY_DOWN , keyDownList ) ; stage . addEventListener ( KeyboardEvent. KEY_UP , keyUpList ) ; world. addEventListener ( QuickBox2D. STEP ,onStep ) ; ... var bup: Boolean ; var bdown: Boolean ; var bleft: Boolean ; var bright: Boolean ; function keyDownList ( e :KeyboardEvent ) : void { if ( e . keyCode == Keyboard. UP ) { bup = true ; } if ( e . keyCode == Keyboard. LEFT ) { bleft = true ; } if ( e . keyCode == Keyboard. DOWN ) { bdown = true ; } if ( e . keyCode == Keyboard. RIGHT ) { bright = true ; } } ; function keyUpList ( e :KeyboardEvent ) : void { if ( e . keyCode == Keyboard. UP ) { bup = false ; } ; if ( e . keyCode == Keyboard. LEFT ) { bleft = false ; } ; if ( e . keyCode == Keyboard. DOWN ) { bdown = false ; } ; if ( e . keyCode == Keyboard. RIGHT ) { bright = false ; } ; } ; function onStep ( evt:Event ) : void { car. accelerate ( ) ; if ( bup ) { car. drive = 1 } ; if ( bdown ) { car. drive =- 1 } ; if ( ! bup && ! bdown ) ( car. drive = 0 ) ; if ( bleft ) { car. steer =- 1 } ; if ( bright ) { car. steer = 1 } ; if ( ! bleft && ! bright ) { car. steer = 0 } ; } ;
stage . addEventListener ( KeyboardEvent. KEY_DOWN , keyDownList ) ; stage . addEventListener ( KeyboardEvent. KEY_UP , keyUpList ) ; world. addEventListener ( QuickBox2D. STEP ,onStep ) ; ... var bup: Boolean ; var bdown: Boolean ; var bleft: Boolean ; var bright: Boolean ; function keyDownList ( e :KeyboardEvent ) : void { if ( e . keyCode == Keyboard. UP ) { bup = true ; } if ( e . keyCode == Keyboard. LEFT ) { bleft = true ; } if ( e . keyCode == Keyboard. DOWN ) { bdown = true ; } if ( e . keyCode == Keyboard. RIGHT ) { bright = true ; } } ; function keyUpList ( e :KeyboardEvent ) : void { if ( e . keyCode == Keyboard. UP ) { bup = false ; } ; if ( e . keyCode == Keyboard. LEFT ) { bleft = false ; } ; if ( e . keyCode == Keyboard. DOWN ) { bdown = false ; } ; if ( e . keyCode == Keyboard. RIGHT ) { bright = false ; } ; } ; function onStep ( evt:Event ) : void { car. accelerate ( ) ; if ( bup ) { car. drive = 1 } ; if ( bdown ) { car. drive =- 1 } ; if ( ! bup && ! bdown ) ( car. drive = 0 ) ; if ( bleft ) { car. steer =- 1 } ; if ( bright ) { car. steer = 1 } ; if ( ! bleft && ! bright ) { car. steer = 0 } ; } ;
stage . addEventListener ( KeyboardEvent. KEY_DOWN , keyDownList ) ; stage . addEventListener ( KeyboardEvent. KEY_UP , keyUpList ) ; world. addEventListener ( QuickBox2D. STEP ,onStep ) ; ... var bup: Boolean ; var bdown: Boolean ; var bleft: Boolean ; var bright: Boolean ; function keyDownList ( e :KeyboardEvent ) : void { if ( e . keyCode == Keyboard. UP ) { bup = true ; } if ( e . keyCode == Keyboard. LEFT ) { bleft = true ; } if ( e . keyCode == Keyboard. DOWN ) { bdown = true ; } if ( e . keyCode == Keyboard. RIGHT ) { bright = true ; } } ; function keyUpList ( e :KeyboardEvent ) : void { if ( e . keyCode == Keyboard. UP ) { bup = false ; } ; if ( e . keyCode == Keyboard. LEFT ) { bleft = false ; } ; if ( e . keyCode == Keyboard. DOWN ) { bdown = false ; } ; if ( e . keyCode == Keyboard. RIGHT ) { bright = false ; } ; } ; function onStep ( evt:Event ) : void { car. accelerate ( ) ; if ( bup ) { car. drive = 1 } ; if ( bdown ) { car. drive =- 1 } ; if ( ! bup && ! bdown ) ( car. drive = 0 ) ; if ( bleft ) { car. steer =- 1 } ; if ( bright ) { car. steer = 1 } ; if ( ! bleft && ! bright ) { car. steer = 0 } ; } ;
stage . addEventListener ( KeyboardEvent. KEY_DOWN , keyDownList ) ; stage . addEventListener ( KeyboardEvent. KEY_UP , keyUpList ) ; world. addEventListener ( QuickBox2D. STEP ,onStep ) ; ... var bup: Boolean ; var bdown: Boolean ; var bleft: Boolean ; var bright: Boolean ; function keyDownList ( e :KeyboardEvent ) : void { if ( e . keyCode == Keyboard. UP ) { bup = true ; } if ( e . keyCode == Keyboard. LEFT ) { bleft = true ; } if ( e . keyCode == Keyboard. DOWN ) { bdown = true ; } if ( e . keyCode == Keyboard. RIGHT ) { bright = true ; } } ; function keyUpList ( e :KeyboardEvent ) : void { if ( e . keyCode == Keyboard. UP ) { bup = false ; } ; if ( e . keyCode == Keyboard. LEFT ) { bleft = false ; } ; if ( e . keyCode == Keyboard. DOWN ) { bdown = false ; } ; if ( e . keyCode == Keyboard. RIGHT ) { bright = false ; } ; } ; function onStep ( evt:Event ) : void { car. accelerate ( ) ; if ( bup ) { car. drive = 1 } ; if ( bdown ) { car. drive =- 1 } ; if ( ! bup && ! bdown ) ( car. drive = 0 ) ; if ( bleft ) { car. steer =- 1 } ; if ( bright ) { car. steer = 1 } ; if ( ! bleft && ! bright ) { car. steer = 0 } ; } ;
stage . addEventListener ( KeyboardEvent. KEY_DOWN , keyDownList ) ; stage . addEventListener ( KeyboardEvent. KEY_UP , keyUpList ) ; world. addEventListener ( QuickBox2D. STEP ,onStep ) ; ... var bup: Boolean ; var bdown: Boolean ; var bleft: Boolean ; var bright: Boolean ; function keyDownList ( e :KeyboardEvent ) : void { if ( e . keyCode == Keyboard. UP ) { bup = true ; } if ( e . keyCode == Keyboard. LEFT ) { bleft = true ; } if ( e . keyCode == Keyboard. DOWN ) { bdown = true ; } if ( e . keyCode == Keyboard. RIGHT ) { bright = true ; } } ; function keyUpList ( e :KeyboardEvent ) : void { if ( e . keyCode == Keyboard. UP ) { bup = false ; } ; if ( e . keyCode == Keyboard. LEFT ) { bleft = false ; } ; if ( e . keyCode == Keyboard. DOWN ) { bdown = false ; } ; if ( e . keyCode == Keyboard. RIGHT ) { bright = false ; } ; } ; function onStep ( evt:Event ) : void { car. accelerate ( ) ; if ( bup ) { car. drive = 1 } ; if ( bdown ) { car. drive =- 1 } ; if ( ! bup && ! bdown ) ( car. drive = 0 ) ; if ( bleft ) { car. steer =- 1 } ; if ( bright ) { car. steer = 1 } ; if ( ! bleft && ! bright ) { car. steer = 0 } ; } ;
stage . addEventListener ( KeyboardEvent. KEY_DOWN , keyDownList ) ; stage . addEventListener ( KeyboardEvent. KEY_UP , keyUpList ) ; world. addEventListener ( QuickBox2D. STEP ,onStep ) ; ... var bup: Boolean ; var bdown: Boolean ; var bleft: Boolean ; var bright: Boolean ; function keyDownList ( e :KeyboardEvent ) : void { if ( e . keyCode == Keyboard. UP ) { bup = true ; } if ( e . keyCode == Keyboard. LEFT ) { bleft = true ; } if ( e . keyCode == Keyboard. DOWN ) { bdown = true ; } if ( e . keyCode == Keyboard. RIGHT ) { bright = true ; } } ; function keyUpList ( e :KeyboardEvent ) : void { if ( e . keyCode == Keyboard. UP ) { bup = false ; } ; if ( e . keyCode == Keyboard. LEFT ) { bleft = false ; } ; if ( e . keyCode == Keyboard. DOWN ) { bdown = false ; } ; if ( e . keyCode == Keyboard. RIGHT ) { bright = false ; } ; } ; function onStep ( evt:Event ) : void { car. accelerate ( ) ; if ( bup ) { car. drive = 1 } ; if ( bdown ) { car. drive =- 1 } ; if ( ! bup && ! bdown ) ( car. drive = 0 ) ; if ( bleft ) { car. steer =- 1 } ; if ( bright ) { car. steer = 1 } ; if ( ! bleft && ! bright ) { car. steer = 0 } ; } ;
stage . addEventListener ( KeyboardEvent. KEY_DOWN , keyDownList ) ; stage . addEventListener ( KeyboardEvent. KEY_UP , keyUpList ) ; world. addEventListener ( QuickBox2D. STEP ,onStep ) ; ... var bup: Boolean ; var bdown: Boolean ; var bleft: Boolean ; var bright: Boolean ; function keyDownList ( e :KeyboardEvent ) : void { if ( e . keyCode == Keyboard. UP ) { bup = true ; } if ( e . keyCode == Keyboard. LEFT ) { bleft = true ; } if ( e . keyCode == Keyboard. DOWN ) { bdown = true ; } if ( e . keyCode == Keyboard. RIGHT ) { bright = true ; } } ; function keyUpList ( e :KeyboardEvent ) : void { if ( e . keyCode == Keyboard. UP ) { bup = false ; } ; if ( e . keyCode == Keyboard. LEFT ) { bleft = false ; } ; if ( e . keyCode == Keyboard. DOWN ) { bdown = false ; } ; if ( e . keyCode == Keyboard. RIGHT ) { bright = false ; } ; } ; function onStep ( evt:Event ) : void { car. accelerate ( ) ; if ( bup ) { car. drive = 1 } ; if ( bdown ) { car. drive =- 1 } ; if ( ! bup && ! bdown ) ( car. drive = 0 ) ; if ( bleft ) { car. steer =- 1 } ; if ( bright ) { car. steer = 1 } ; if ( ! bleft && ! bright ) { car. steer = 0 } ; } ;
stage . addEventListener ( KeyboardEvent. KEY_DOWN , keyDownList ) ; stage . addEventListener ( KeyboardEvent. KEY_UP , keyUpList ) ; world. addEventListener ( QuickBox2D. STEP ,onStep ) ; ... var bup: Boolean ; var bdown: Boolean ; var bleft: Boolean ; var bright: Boolean ; function keyDownList ( e :KeyboardEvent ) : void { if ( e . keyCode == Keyboard. UP ) { bup = true ; } if ( e . keyCode == Keyboard. LEFT ) { bleft = true ; } if ( e . keyCode == Keyboard. DOWN ) { bdown = true ; } if ( e . keyCode == Keyboard. RIGHT ) { bright = true ; } } ; function keyUpList ( e :KeyboardEvent ) : void { if ( e . keyCode == Keyboard. UP ) { bup = false ; } ; if ( e . keyCode == Keyboard. LEFT ) { bleft = false ; } ; if ( e . keyCode == Keyboard. DOWN ) { bdown = false ; } ; if ( e . keyCode == Keyboard. RIGHT ) { bright = false ; } ; } ; function onStep ( evt:Event ) : void { car. accelerate ( ) ; if ( bup ) { car. drive = 1 } ; if ( bdown ) { car. drive =- 1 } ; if ( ! bup && ! bdown ) ( car. drive = 0 ) ; if ( bleft ) { car. steer =- 1 } ; if ( bright ) { car. steer = 1 } ; if ( ! bleft && ! bright ) { car. steer = 0 } ; } ;
stage . addEventListener ( KeyboardEvent. KEY_DOWN , keyDownList ) ; stage . addEventListener ( KeyboardEvent. KEY_UP , keyUpList ) ; world. addEventListener ( QuickBox2D. STEP ,onStep ) ; ... var bup: Boolean ; var bdown: Boolean ; var bleft: Boolean ; var bright: Boolean ; function keyDownList ( e :KeyboardEvent ) : void { if ( e . keyCode == Keyboard. UP ) { bup = true ; } if ( e . keyCode == Keyboard. LEFT ) { bleft = true ; } if ( e . keyCode == Keyboard. DOWN ) { bdown = true ; } if ( e . keyCode == Keyboard. RIGHT ) { bright = true ; } } ; function keyUpList ( e :KeyboardEvent ) : void { if ( e . keyCode == Keyboard. UP ) { bup = false ; } ; if ( e . keyCode == Keyboard. LEFT ) { bleft = false ; } ; if ( e . keyCode == Keyboard. DOWN ) { bdown = false ; } ; if ( e . keyCode == Keyboard. RIGHT ) { bright = false ; } ; } ; function onStep ( evt:Event ) : void { car. accelerate ( ) ; if ( bup ) { car. drive = 1 } ; if ( bdown ) { car. drive =- 1 } ; if ( ! bup && ! bdown ) ( car. drive = 0 ) ; if ( bleft ) { car. steer =- 1 } ; if ( bright ) { car. steer = 1 } ; if ( ! bleft && ! bright ) { car. steer = 0 } ; } ;
stage . addEventListener ( KeyboardEvent. KEY_DOWN , keyDownList ) ; stage . addEventListener ( KeyboardEvent. KEY_UP , keyUpList ) ; world. addEventListener ( QuickBox2D. STEP ,onStep ) ; ... var bup: Boolean ; var bdown: Boolean ; var bleft: Boolean ; var bright: Boolean ; function keyDownList ( e :KeyboardEvent ) : void { if ( e . keyCode == Keyboard. UP ) { bup = true ; } if ( e . keyCode == Keyboard. LEFT ) { bleft = true ; } if ( e . keyCode == Keyboard. DOWN ) { bdown = true ; } if ( e . keyCode == Keyboard. RIGHT ) { bright = true ; } } ; function keyUpList ( e :KeyboardEvent ) : void { if ( e . keyCode == Keyboard. UP ) { bup = false ; } ; if ( e . keyCode == Keyboard. LEFT ) { bleft = false ; } ; if ( e . keyCode == Keyboard. DOWN ) { bdown = false ; } ; if ( e . keyCode == Keyboard. RIGHT ) { bright = false ; } ; } ; function onStep ( evt:Event ) : void { car. accelerate ( ) ; if ( bup ) { car. drive = 1 } ; if ( bdown ) { car. drive =- 1 } ; if ( ! bup && ! bdown ) ( car. drive = 0 ) ; if ( bleft ) { car. steer =- 1 } ; if ( bright ) { car. steer = 1 } ; if ( ! bleft && ! bright ) { car. steer = 0 } ; } ;
stage . addEventListener ( KeyboardEvent. KEY_DOWN , keyDownList ) ; stage . addEventListener ( KeyboardEvent. KEY_UP , keyUpList ) ; world. addEventListener ( QuickBox2D. STEP ,onStep ) ; ... var bup: Boolean ; var bdown: Boolean ; var bleft: Boolean ; var bright: Boolean ; function keyDownList ( e :KeyboardEvent ) : void { if ( e . keyCode == Keyboard. UP ) { bup = true ; } if ( e . keyCode == Keyboard. LEFT ) { bleft = true ; } if ( e . keyCode == Keyboard. DOWN ) { bdown = true ; } if ( e . keyCode == Keyboard. RIGHT ) { bright = true ; } } ; function keyUpList ( e :KeyboardEvent ) : void { if ( e . keyCode == Keyboard. UP ) { bup = false ; } ; if ( e . keyCode == Keyboard. LEFT ) { bleft = false ; } ; if ( e . keyCode == Keyboard. DOWN ) { bdown = false ; } ; if ( e . keyCode == Keyboard. RIGHT ) { bright = false ; } ; } ; function onStep ( evt:Event ) : void { car. accelerate ( ) ; if ( bup ) { car. drive = 1 } ; if ( bdown ) { car. drive =- 1 } ; if ( ! bup && ! bdown ) ( car. drive = 0 ) ; if ( bleft ) { car. steer =- 1 } ; if ( bright ) { car. steer = 1 } ; if ( ! bleft && ! bright ) { car. steer = 0 } ; } ;
stage . addEventListener ( KeyboardEvent. KEY_DOWN , keyDownList ) ; stage . addEventListener ( KeyboardEvent. KEY_UP , keyUpList ) ; world. addEventListener ( QuickBox2D. STEP ,onStep ) ; ... var bup: Boolean ; var bdown: Boolean ; var bleft: Boolean ; var bright: Boolean ; function keyDownList ( e :KeyboardEvent ) : void { if ( e . keyCode == Keyboard. UP ) { bup = true ; } if ( e . keyCode == Keyboard. LEFT ) { bleft = true ; } if ( e . keyCode == Keyboard. DOWN ) { bdown = true ; } if ( e . keyCode == Keyboard. RIGHT ) { bright = true ; } } ; function keyUpList ( e :KeyboardEvent ) : void { if ( e . keyCode == Keyboard. UP ) { bup = false ; } ; if ( e . keyCode == Keyboard. LEFT ) { bleft = false ; } ; if ( e . keyCode == Keyboard. DOWN ) { bdown = false ; } ; if ( e . keyCode == Keyboard. RIGHT ) { bright = false ; } ; } ; function onStep ( evt:Event ) : void { car. accelerate ( ) ; if ( bup ) { car. drive = 1 } ; if ( bdown ) { car. drive =- 1 } ; if ( ! bup && ! bdown ) ( car. drive = 0 ) ; if ( bleft ) { car. steer =- 1 } ; if ( bright ) { car. steer = 1 } ; if ( ! bleft && ! bright ) { car. steer = 0 } ; } ;
stage . addEventListener ( KeyboardEvent. KEY_DOWN , keyDownList ) ; stage . addEventListener ( KeyboardEvent. KEY_UP , keyUpList ) ; world. addEventListener ( QuickBox2D. STEP ,onStep ) ; ... var bup: Boolean ; var bdown: Boolean ; var bleft: Boolean ; var bright: Boolean ; function keyDownList ( e :KeyboardEvent ) : void { if ( e . keyCode == Keyboard. UP ) { bup = true ; } if ( e . keyCode == Keyboard. LEFT ) { bleft = true ; } if ( e . keyCode == Keyboard. DOWN ) { bdown = true ; } if ( e . keyCode == Keyboard. RIGHT ) { bright = true ; } } ; function keyUpList ( e :KeyboardEvent ) : void { if ( e . keyCode == Keyboard. UP ) { bup = false ; } ; if ( e . keyCode == Keyboard. LEFT ) { bleft = false ; } ; if ( e . keyCode == Keyboard. DOWN ) { bdown = false ; } ; if ( e . keyCode == Keyboard. RIGHT ) { bright = false ; } ; } ; function onStep ( evt:Event ) : void { car. accelerate ( ) ; if ( bup ) { car. drive = 1 } ; if ( bdown ) { car. drive =- 1 } ; if ( ! bup && ! bdown ) ( car. drive = 0 ) ; if ( bleft ) { car. steer =- 1 } ; if ( bright ) { car. steer = 1 } ; if ( ! bleft && ! bright ) { car. steer = 0 } ; } ;
stage . addEventListener ( KeyboardEvent. KEY_DOWN , keyDownList ) ; stage . addEventListener ( KeyboardEvent. KEY_UP , keyUpList ) ; world. addEventListener ( QuickBox2D. STEP ,onStep ) ; ... var bup: Boolean ; var bdown: Boolean ; var bleft: Boolean ; var bright: Boolean ; function keyDownList ( e :KeyboardEvent ) : void { if ( e . keyCode == Keyboard. UP ) { bup = true ; } if ( e . keyCode == Keyboard. LEFT ) { bleft = true ; } if ( e . keyCode == Keyboard. DOWN ) { bdown = true ; } if ( e . keyCode == Keyboard. RIGHT ) { bright = true ; } } ; function keyUpList ( e :KeyboardEvent ) : void { if ( e . keyCode == Keyboard. UP ) { bup = false ; } ; if ( e . keyCode == Keyboard. LEFT ) { bleft = false ; } ; if ( e . keyCode == Keyboard. DOWN ) { bdown = false ; } ; if ( e . keyCode == Keyboard. RIGHT ) { bright = false ; } ; } ; function onStep ( evt:Event ) : void { car. accelerate ( ) ; if ( bup ) { car. drive = 1 } ; if ( bdown ) { car. drive =- 1 } ; if ( ! bup && ! bdown ) ( car. drive = 0 ) ; if ( bleft ) { car. steer =- 1 } ; if ( bright ) { car. steer = 1 } ; if ( ! bleft && ! bright ) { car. steer = 0 } ; } ;
stage . addEventListener ( KeyboardEvent. KEY_DOWN , keyDownList ) ; stage . addEventListener ( KeyboardEvent. KEY_UP , keyUpList ) ; world. addEventListener ( QuickBox2D. STEP ,onStep ) ; ... var bup: Boolean ; var bdown: Boolean ; var bleft: Boolean ; var bright: Boolean ; function keyDownList ( e :KeyboardEvent ) : void { if ( e . keyCode == Keyboard. UP ) { bup = true ; } if ( e . keyCode == Keyboard. LEFT ) { bleft = true ; } if ( e . keyCode == Keyboard. DOWN ) { bdown = true ; } if ( e . keyCode == Keyboard. RIGHT ) { bright = true ; } } ; function keyUpList ( e :KeyboardEvent ) : void { if ( e . keyCode == Keyboard. UP ) { bup = false ; } ; if ( e . keyCode == Keyboard. LEFT ) { bleft = false ; } ; if ( e . keyCode == Keyboard. DOWN ) { bdown = false ; } ; if ( e . keyCode == Keyboard. RIGHT ) { bright = false ; } ; } ; function onStep ( evt:Event ) : void { car. accelerate ( ) ; if ( bup ) { car. drive = 1 } ; if ( bdown ) { car. drive =- 1 } ; if ( ! bup && ! bdown ) ( car. drive = 0 ) ; if ( bleft ) { car. steer =- 1 } ; if ( bright ) { car. steer = 1 } ; if ( ! bleft && ! bright ) { car. steer = 0 } ; } ;
stage . addEventListener ( KeyboardEvent. KEY_DOWN , keyDownList ) ; stage . addEventListener ( KeyboardEvent. KEY_UP , keyUpList ) ; world. addEventListener ( QuickBox2D. STEP ,onStep ) ; ... var bup: Boolean ; var bdown: Boolean ; var bleft: Boolean ; var bright: Boolean ; function keyDownList ( e :KeyboardEvent ) : void { if ( e . keyCode == Keyboard. UP ) { bup = true ; } if ( e . keyCode == Keyboard. LEFT ) { bleft = true ; } if ( e . keyCode == Keyboard. DOWN ) { bdown = true ; } if ( e . keyCode == Keyboard. RIGHT ) { bright = true ; } } ; function keyUpList ( e :KeyboardEvent ) : void { if ( e . keyCode == Keyboard. UP ) { bup = false ; } ; if ( e . keyCode == Keyboard. LEFT ) { bleft = false ; } ; if ( e . keyCode == Keyboard. DOWN ) { bdown = false ; } ; if ( e . keyCode == Keyboard. RIGHT ) { bright = false ; } ; } ; function onStep ( evt:Event ) : void { car. accelerate ( ) ; if ( bup ) { car. drive = 1 } ; if ( bdown ) { car. drive =- 1 } ; if ( ! bup && ! bdown ) ( car. drive = 0 ) ; if ( bleft ) { car. steer =- 1 } ; if ( bright ) { car. steer = 1 } ; if ( ! bleft && ! bright ) { car. steer = 0 } ; } ;
stage . addEventListener ( KeyboardEvent. KEY_DOWN , keyDownList ) ; stage . addEventListener ( KeyboardEvent. KEY_UP , keyUpList ) ; world. addEventListener ( QuickBox2D. STEP ,onStep ) ; ... var bup: Boolean ; var bdown: Boolean ; var bleft: Boolean ; var bright: Boolean ; function keyDownList ( e :KeyboardEvent ) : void { if ( e . keyCode == Keyboard. UP ) { bup = true ; } if ( e . keyCode == Keyboard. LEFT ) { bleft = true ; } if ( e . keyCode == Keyboard. DOWN ) { bdown = true ; } if ( e . keyCode == Keyboard. RIGHT ) { bright = true ; } } ; function keyUpList ( e :KeyboardEvent ) : void { if ( e . keyCode == Keyboard. UP ) { bup = false ; } ; if ( e . keyCode == Keyboard. LEFT ) { bleft = false ; } ; if ( e . keyCode == Keyboard. DOWN ) { bdown = false ; } ; if ( e . keyCode == Keyboard. RIGHT ) { bright = false ; } ; } ; function onStep ( evt:Event ) : void { car. accelerate ( ) ; if ( bup ) { car. drive = 1 } ; if ( bdown ) { car. drive =- 1 } ; if ( ! bup && ! bdown ) ( car. drive = 0 ) ; if ( bleft ) { car. steer =- 1 } ; if ( bright ) { car. steer = 1 } ; if ( ! bleft && ! bright ) { car. steer = 0 } ; } ;
stage . addEventListener ( KeyboardEvent. KEY_DOWN , keyDownList ) ; stage . addEventListener ( KeyboardEvent. KEY_UP , keyUpList ) ; world. addEventListener ( QuickBox2D. STEP ,onStep ) ; ... var bup: Boolean ; var bdown: Boolean ; var bleft: Boolean ; var bright: Boolean ; function keyDownList ( e :KeyboardEvent ) : void { if ( e . keyCode == Keyboard. UP ) { bup = true ; } if ( e . keyCode == Keyboard. LEFT ) { bleft = true ; } if ( e . keyCode == Keyboard. DOWN ) { bdown = true ; } if ( e . keyCode == Keyboard. RIGHT ) { bright = true ; } } ; function keyUpList ( e :KeyboardEvent ) : void { if ( e . keyCode == Keyboard. UP ) { bup = false ; } ; if ( e . keyCode == Keyboard. LEFT ) { bleft = false ; } ; if ( e . keyCode == Keyboard. DOWN ) { bdown = false ; } ; if ( e . keyCode == Keyboard. RIGHT ) { bright = false ; } ; } ; function onStep ( evt:Event ) : void { car. accelerate ( ) ; if ( bup ) { car. drive = 1 } ; if ( bdown ) { car. drive =- 1 } ; if ( ! bup && ! bdown ) ( car. drive = 0 ) ; if ( bleft ) { car. steer =- 1 } ; if ( bright ) { car. steer = 1 } ; if ( ! bleft && ! bright ) { car. steer = 0 } ; } ;
stage . addEventListener ( KeyboardEvent. KEY_DOWN , keyDownList ) ; stage . addEventListener ( KeyboardEvent. KEY_UP , keyUpList ) ; world. addEventListener ( QuickBox2D. STEP ,onStep ) ; ... var bup: Boolean ; var bdown: Boolean ; var bleft: Boolean ; var bright: Boolean ; function keyDownList ( e :KeyboardEvent ) : void { if ( e . keyCode == Keyboard. UP ) { bup = true ; } if ( e . keyCode == Keyboard. LEFT ) { bleft = true ; } if ( e . keyCode == Keyboard. DOWN ) { bdown = true ; } if ( e . keyCode == Keyboard. RIGHT ) { bright = true ; } } ; function keyUpList ( e :KeyboardEvent ) : void { if ( e . keyCode == Keyboard. UP ) { bup = false ; } ; if ( e . keyCode == Keyboard. LEFT ) { bleft = false ; } ; if ( e . keyCode == Keyboard. DOWN ) { bdown = false ; } ; if ( e . keyCode == Keyboard. RIGHT ) { bright = false ; } ; } ; function onStep ( evt:Event ) : void { car. accelerate ( ) ; if ( bup ) { car. drive = 1 } ; if ( bdown ) { car. drive =- 1 } ; if ( ! bup && ! bdown ) ( car. drive = 0 ) ; if ( bleft ) { car. steer =- 1 } ; if ( bright ) { car. steer = 1 } ; if ( ! bleft && ! bright ) { car. steer = 0 } ; } ;
stage . addEventListener ( KeyboardEvent. KEY_DOWN , keyDownList ) ; stage . addEventListener ( KeyboardEvent. KEY_UP , keyUpList ) ; world. addEventListener ( QuickBox2D. STEP ,onStep ) ; ... var bup: Boolean ; var bdown: Boolean ; var bleft: Boolean ; var bright: Boolean ; function keyDownList ( e :KeyboardEvent ) : void { if ( e . keyCode == Keyboard. UP ) { bup = true ; } if ( e . keyCode == Keyboard. LEFT ) { bleft = true ; } if ( e . keyCode == Keyboard. DOWN ) { bdown = true ; } if ( e . keyCode == Keyboard. RIGHT ) { bright = true ; } } ; function keyUpList ( e :KeyboardEvent ) : void { if ( e . keyCode == Keyboard. UP ) { bup = false ; } ; if ( e . keyCode == Keyboard. LEFT ) { bleft = false ; } ; if ( e . keyCode == Keyboard. DOWN ) { bdown = false ; } ; if ( e . keyCode == Keyboard. RIGHT ) { bright = false ; } ; } ; function onStep ( evt:Event ) : void { car. accelerate ( ) ; if ( bup ) { car. drive = 1 } ; if ( bdown ) { car. drive =- 1 } ; if ( ! bup && ! bdown ) ( car. drive = 0 ) ; if ( bleft ) { car. steer =- 1 } ; if ( bright ) { car. steer = 1 } ; if ( ! bleft && ! bright ) { car. steer = 0 } ; } ;
stage . addEventListener ( KeyboardEvent. KEY_DOWN , keyDownList ) ; stage . addEventListener ( KeyboardEvent. KEY_UP , keyUpList ) ; world. addEventListener ( QuickBox2D. STEP ,onStep ) ; ... var bup: Boolean ; var bdown: Boolean ; var bleft: Boolean ; var bright: Boolean ; function keyDownList ( e :KeyboardEvent ) : void { if ( e . keyCode == Keyboard. UP ) { bup = true ; } if ( e . keyCode == Keyboard. LEFT ) { bleft = true ; } if ( e . keyCode == Keyboard. DOWN ) { bdown = true ; } if ( e . keyCode == Keyboard. RIGHT ) { bright = true ; } } ; function keyUpList ( e :KeyboardEvent ) : void { if ( e . keyCode == Keyboard. UP ) { bup = false ; } ; if ( e . keyCode == Keyboard. LEFT ) { bleft = false ; } ; if ( e . keyCode == Keyboard. DOWN ) { bdown = false ; } ; if ( e . keyCode == Keyboard. RIGHT ) { bright = false ; } ; } ; function onStep ( evt:Event ) : void { car. accelerate ( ) ; if ( bup ) { car. drive = 1 } ; if ( bdown ) { car. drive =- 1 } ; if ( ! bup && ! bdown ) ( car. drive = 0 ) ; if ( bleft ) { car. steer =- 1 } ; if ( bright ) { car. steer = 1 } ; if ( ! bleft && ! bright ) { car. steer = 0 } ; } ;
stage . addEventListener ( KeyboardEvent. KEY_DOWN , keyDownList ) ; stage . addEventListener ( KeyboardEvent. KEY_UP , keyUpList ) ; world. addEventListener ( QuickBox2D. STEP ,onStep ) ; ... var bup: Boolean ; var bdown: Boolean ; var bleft: Boolean ; var bright: Boolean ; function keyDownList ( e :KeyboardEvent ) : void { if ( e . keyCode == Keyboard. UP ) { bup = true ; } if ( e . keyCode == Keyboard. LEFT ) { bleft = true ; } if ( e . keyCode == Keyboard. DOWN ) { bdown = true ; } if ( e . keyCode == Keyboard. RIGHT ) { bright = true ; } } ; function keyUpList ( e :KeyboardEvent ) : void { if ( e . keyCode == Keyboard. UP ) { bup = false ; } ; if ( e . keyCode == Keyboard. LEFT ) { bleft = false ; } ; if ( e . keyCode == Keyboard. DOWN ) { bdown = false ; } ; if ( e . keyCode == Keyboard. RIGHT ) { bright = false ; } ; } ; function onStep ( evt:Event ) : void { car. accelerate ( ) ; if ( bup ) { car. drive = 1 } ; if ( bdown ) { car. drive =- 1 } ; if ( ! bup && ! bdown ) ( car. drive = 0 ) ; if ( bleft ) { car. steer =- 1 } ; if ( bright ) { car. steer = 1 } ; if ( ! bleft && ! bright ) { car. steer = 0 } ; } ;
stage . addEventListener ( KeyboardEvent. KEY_DOWN , keyDownList ) ; stage . addEventListener ( KeyboardEvent. KEY_UP , keyUpList ) ; world. addEventListener ( QuickBox2D. STEP ,onStep ) ; ... var bup: Boolean ; var bdown: Boolean ; var bleft: Boolean ; var bright: Boolean ; function keyDownList ( e :KeyboardEvent ) : void { if ( e . keyCode == Keyboard. UP ) { bup = true ; } if ( e . keyCode == Keyboard. LEFT ) { bleft = true ; } if ( e . keyCode == Keyboard. DOWN ) { bdown = true ; } if ( e . keyCode == Keyboard. RIGHT ) { bright = true ; } } ; function keyUpList ( e :KeyboardEvent ) : void { if ( e . keyCode == Keyboard. UP ) { bup = false ; } ; if ( e . keyCode == Keyboard. LEFT ) { bleft = false ; } ; if ( e . keyCode == Keyboard. DOWN ) { bdown = false ; } ; if ( e . keyCode == Keyboard. RIGHT ) { bright = false ; } ; } ; function onStep ( evt:Event ) : void { car. accelerate ( ) ; if ( bup ) { car. drive = 1 } ; if ( bdown ) { car. drive =- 1 } ; if ( ! bup && ! bdown ) ( car. drive = 0 ) ; if ( bleft ) { car. steer =- 1 } ; if ( bright ) { car. steer = 1 } ; if ( ! bleft && ! bright ) { car. steer = 0 } ; } ;
stage . addEventListener ( KeyboardEvent. KEY_DOWN , keyDownList ) ; stage . addEventListener ( KeyboardEvent. KEY_UP , keyUpList ) ; world. addEventListener ( QuickBox2D. STEP ,onStep ) ; ... var bup: Boolean ; var bdown: Boolean ; var bleft: Boolean ; var bright: Boolean ; function keyDownList ( e :KeyboardEvent ) : void { if ( e . keyCode == Keyboard. UP ) { bup = true ; } if ( e . keyCode == Keyboard. LEFT ) { bleft = true ; } if ( e . keyCode == Keyboard. DOWN ) { bdown = true ; } if ( e . keyCode == Keyboard. RIGHT ) { bright = true ; } } ; function keyUpList ( e :KeyboardEvent ) : void { if ( e . keyCode == Keyboard. UP ) { bup = false ; } ; if ( e . keyCode == Keyboard. LEFT ) { bleft = false ; } ; if ( e . keyCode == Keyboard. DOWN ) { bdown = false ; } ; if ( e . keyCode == Keyboard. RIGHT ) { bright = false ; } ; } ; function onStep ( evt:Event ) : void { car. accelerate ( ) ; if ( bup ) { car. drive = 1 } ; if ( bdown ) { car. drive =- 1 } ; if ( ! bup && ! bdown ) ( car. drive = 0 ) ; if ( bleft ) { car. steer =- 1 } ; if ( bright ) { car. steer = 1 } ; if ( ! bleft && ! bright ) { car. steer = 0 } ; } ;
stage . addEventListener ( KeyboardEvent. KEY_DOWN , keyDownList ) ; stage . addEventListener ( KeyboardEvent. KEY_UP , keyUpList ) ; world. addEventListener ( QuickBox2D. STEP ,onStep ) ; ... var bup: Boolean ; var bdown: Boolean ; var bleft: Boolean ; var bright: Boolean ; function keyDownList ( e :KeyboardEvent ) : void { if ( e . keyCode == Keyboard. UP ) { bup = true ; } if ( e . keyCode == Keyboard. LEFT ) { bleft = true ; } if ( e . keyCode == Keyboard. DOWN ) { bdown = true ; } if ( e . keyCode == Keyboard. RIGHT ) { bright = true ; } } ; function keyUpList ( e :KeyboardEvent ) : void { if ( e . keyCode == Keyboard. UP ) { bup = false ; } ; if ( e . keyCode == Keyboard. LEFT ) { bleft = false ; } ; if ( e . keyCode == Keyboard. DOWN ) { bdown = false ; } ; if ( e . keyCode == Keyboard. RIGHT ) { bright = false ; } ; } ; function onStep ( evt:Event ) : void { car. accelerate ( ) ; if ( bup ) { car. drive = 1 } ; if ( bdown ) { car. drive =- 1 } ; if ( ! bup && ! bdown ) ( car. drive = 0 ) ; if ( bleft ) { car. steer =- 1 } ; if ( bright ) { car. steer = 1 } ; if ( ! bleft && ! bright ) { car. steer = 0 } ; } ;
stage . addEventListener ( KeyboardEvent. KEY_DOWN , keyDownList ) ; stage . addEventListener ( KeyboardEvent. KEY_UP , keyUpList ) ; world. addEventListener ( QuickBox2D. STEP ,onStep ) ; ... var bup: Boolean ; var bdown: Boolean ; var bleft: Boolean ; var bright: Boolean ; function keyDownList ( e :KeyboardEvent ) : void { if ( e . keyCode == Keyboard. UP ) { bup = true ; } if ( e . keyCode == Keyboard. LEFT ) { bleft = true ; } if ( e . keyCode == Keyboard. DOWN ) { bdown = true ; } if ( e . keyCode == Keyboard. RIGHT ) { bright = true ; } } ; function keyUpList ( e :KeyboardEvent ) : void { if ( e . keyCode == Keyboard. UP ) { bup = false ; } ; if ( e . keyCode == Keyboard. LEFT ) { bleft = false ; } ; if ( e . keyCode == Keyboard. DOWN ) { bdown = false ; } ; if ( e . keyCode == Keyboard. RIGHT ) { bright = false ; } ; } ; function onStep ( evt:Event ) : void { car. accelerate ( ) ; if ( bup ) { car. drive = 1 } ; if ( bdown ) { car. drive =- 1 } ; if ( ! bup && ! bdown ) ( car. drive = 0 ) ; if ( bleft ) { car. steer =- 1 } ; if ( bright ) { car. steer = 1 } ; if ( ! bleft && ! bright ) { car. steer = 0 } ; } ;
stage . addEventListener ( KeyboardEvent. KEY_DOWN , keyDownList ) ; stage . addEventListener ( KeyboardEvent. KEY_UP , keyUpList ) ; world. addEventListener ( QuickBox2D. STEP ,onStep ) ; ... var bup: Boolean ; var bdown: Boolean ; var bleft: Boolean ; var bright: Boolean ; function keyDownList ( e :KeyboardEvent ) : void { if ( e . keyCode == Keyboard. UP ) { bup = true ; } if ( e . keyCode == Keyboard. LEFT ) { bleft = true ; } if ( e . keyCode == Keyboard. DOWN ) { bdown = true ; } if ( e . keyCode == Keyboard. RIGHT ) { bright = true ; } } ; function keyUpList ( e :KeyboardEvent ) : void { if ( e . keyCode == Keyboard. UP ) { bup = false ; } ; if ( e . keyCode == Keyboard. LEFT ) { bleft = false ; } ; if ( e . keyCode == Keyboard. DOWN ) { bdown = false ; } ; if ( e . keyCode == Keyboard. RIGHT ) { bright = false ; } ; } ; function onStep ( evt:Event ) : void { car. accelerate ( ) ; if ( bup ) { car. drive = 1 } ; if ( bdown ) { car. drive =- 1 } ; if ( ! bup && ! bdown ) ( car. drive = 0 ) ; if ( bleft ) { car. steer =- 1 } ; if ( bright ) { car. steer = 1 } ; if ( ! bleft && ! bright ) { car. steer = 0 } ; } ;
実際、 accelerate()プロシージャ自体(行ごとに解析します。完全なプロシージャコードは後ほど説明します):
1)最初に私たちは体を起こす
this ._carBody. body . WakeUp ( ) ; this ._frontAxisBodyLeft. body . WakeUp ( ) ; this ._frontAxisBodyRight. body . WakeUp ( ) ;
this ._carBody. body . WakeUp ( ) ; this ._frontAxisBodyLeft. body . WakeUp ( ) ; this ._frontAxisBodyRight. body . WakeUp ( ) ;
this ._carBody. body . WakeUp ( ) ; this ._frontAxisBodyLeft. body . WakeUp ( ) ; this ._frontAxisBodyRight. body . WakeUp ( ) ;
2)次に、必要な摩擦力(合計、X、およびY)を追加して、急旋回中に車が前進し、スリップしないようにします。慣性で移動する場合は減速します。
if ( this . drive > 0 ) { // this ._acceleration = this ._accelerationForward; this . setLinearDamping ( this ._linearDamping ) ; this . setAngularDamping ( this ._angularDamping ) ; } else { // this ._acceleration = this ._accelerationBackwards; this . setLinearDamping ( this ._linearDamping ) ; this . setAngularDamping ( this ._angularDamping ) ; } this . addFriction ( this ._rearAxisBodyLeft. body , 0 ) ; this . addFriction ( this ._rearAxisBodyRight. body , 0 ) ; this . addFriction ( this ._frontAxisBodyLeft. body , 1 ) ; this . addFriction ( this ._frontAxisBodyRight. body , 1 ) ;
if ( this . drive > 0 ) { // this ._acceleration = this ._accelerationForward; this . setLinearDamping ( this ._linearDamping ) ; this . setAngularDamping ( this ._angularDamping ) ; } else { // this ._acceleration = this ._accelerationBackwards; this . setLinearDamping ( this ._linearDamping ) ; this . setAngularDamping ( this ._angularDamping ) ; } this . addFriction ( this ._rearAxisBodyLeft. body , 0 ) ; this . addFriction ( this ._rearAxisBodyRight. body , 0 ) ; this . addFriction ( this ._frontAxisBodyLeft. body , 1 ) ; this . addFriction ( this ._frontAxisBodyRight. body , 1 ) ;
if ( this . drive > 0 ) { // this ._acceleration = this ._accelerationForward; this . setLinearDamping ( this ._linearDamping ) ; this . setAngularDamping ( this ._angularDamping ) ; } else { // this ._acceleration = this ._accelerationBackwards; this . setLinearDamping ( this ._linearDamping ) ; this . setAngularDamping ( this ._angularDamping ) ; } this . addFriction ( this ._rearAxisBodyLeft. body , 0 ) ; this . addFriction ( this ._rearAxisBodyRight. body , 0 ) ; this . addFriction ( this ._frontAxisBodyLeft. body , 1 ) ; this . addFriction ( this ._frontAxisBodyRight. body , 1 ) ;
if ( this . drive > 0 ) { // this ._acceleration = this ._accelerationForward; this . setLinearDamping ( this ._linearDamping ) ; this . setAngularDamping ( this ._angularDamping ) ; } else { // this ._acceleration = this ._accelerationBackwards; this . setLinearDamping ( this ._linearDamping ) ; this . setAngularDamping ( this ._angularDamping ) ; } this . addFriction ( this ._rearAxisBodyLeft. body , 0 ) ; this . addFriction ( this ._rearAxisBodyRight. body , 0 ) ; this . addFriction ( this ._frontAxisBodyLeft. body , 1 ) ; this . addFriction ( this ._frontAxisBodyRight. body , 1 ) ;
if ( this . drive > 0 ) { // this ._acceleration = this ._accelerationForward; this . setLinearDamping ( this ._linearDamping ) ; this . setAngularDamping ( this ._angularDamping ) ; } else { // this ._acceleration = this ._accelerationBackwards; this . setLinearDamping ( this ._linearDamping ) ; this . setAngularDamping ( this ._angularDamping ) ; } this . addFriction ( this ._rearAxisBodyLeft. body , 0 ) ; this . addFriction ( this ._rearAxisBodyRight. body , 0 ) ; this . addFriction ( this ._frontAxisBodyLeft. body , 1 ) ; this . addFriction ( this ._frontAxisBodyRight. body , 1 ) ;
if ( this . drive > 0 ) { // this ._acceleration = this ._accelerationForward; this . setLinearDamping ( this ._linearDamping ) ; this . setAngularDamping ( this ._angularDamping ) ; } else { // this ._acceleration = this ._accelerationBackwards; this . setLinearDamping ( this ._linearDamping ) ; this . setAngularDamping ( this ._angularDamping ) ; } this . addFriction ( this ._rearAxisBodyLeft. body , 0 ) ; this . addFriction ( this ._rearAxisBodyRight. body , 0 ) ; this . addFriction ( this ._frontAxisBodyLeft. body , 1 ) ; this . addFriction ( this ._frontAxisBodyRight. body , 1 ) ;
if ( this . drive > 0 ) { // this ._acceleration = this ._accelerationForward; this . setLinearDamping ( this ._linearDamping ) ; this . setAngularDamping ( this ._angularDamping ) ; } else { // this ._acceleration = this ._accelerationBackwards; this . setLinearDamping ( this ._linearDamping ) ; this . setAngularDamping ( this ._angularDamping ) ; } this . addFriction ( this ._rearAxisBodyLeft. body , 0 ) ; this . addFriction ( this ._rearAxisBodyRight. body , 0 ) ; this . addFriction ( this ._frontAxisBodyLeft. body , 1 ) ; this . addFriction ( this ._frontAxisBodyRight. body , 1 ) ;
if ( this . drive > 0 ) { // this ._acceleration = this ._accelerationForward; this . setLinearDamping ( this ._linearDamping ) ; this . setAngularDamping ( this ._angularDamping ) ; } else { // this ._acceleration = this ._accelerationBackwards; this . setLinearDamping ( this ._linearDamping ) ; this . setAngularDamping ( this ._angularDamping ) ; } this . addFriction ( this ._rearAxisBodyLeft. body , 0 ) ; this . addFriction ( this ._rearAxisBodyRight. body , 0 ) ; this . addFriction ( this ._frontAxisBodyLeft. body , 1 ) ; this . addFriction ( this ._frontAxisBodyRight. body , 1 ) ;
if ( this . drive > 0 ) { // this ._acceleration = this ._accelerationForward; this . setLinearDamping ( this ._linearDamping ) ; this . setAngularDamping ( this ._angularDamping ) ; } else { // this ._acceleration = this ._accelerationBackwards; this . setLinearDamping ( this ._linearDamping ) ; this . setAngularDamping ( this ._angularDamping ) ; } this . addFriction ( this ._rearAxisBodyLeft. body , 0 ) ; this . addFriction ( this ._rearAxisBodyRight. body , 0 ) ; this . addFriction ( this ._frontAxisBodyLeft. body , 1 ) ; this . addFriction ( this ._frontAxisBodyRight. body , 1 ) ;
if ( this . drive > 0 ) { // this ._acceleration = this ._accelerationForward; this . setLinearDamping ( this ._linearDamping ) ; this . setAngularDamping ( this ._angularDamping ) ; } else { // this ._acceleration = this ._accelerationBackwards; this . setLinearDamping ( this ._linearDamping ) ; this . setAngularDamping ( this ._angularDamping ) ; } this . addFriction ( this ._rearAxisBodyLeft. body , 0 ) ; this . addFriction ( this ._rearAxisBodyRight. body , 0 ) ; this . addFriction ( this ._frontAxisBodyLeft. body , 1 ) ; this . addFriction ( this ._frontAxisBodyRight. body , 1 ) ;
if ( this . drive > 0 ) { // this ._acceleration = this ._accelerationForward; this . setLinearDamping ( this ._linearDamping ) ; this . setAngularDamping ( this ._angularDamping ) ; } else { // this ._acceleration = this ._accelerationBackwards; this . setLinearDamping ( this ._linearDamping ) ; this . setAngularDamping ( this ._angularDamping ) ; } this . addFriction ( this ._rearAxisBodyLeft. body , 0 ) ; this . addFriction ( this ._rearAxisBodyRight. body , 0 ) ; this . addFriction ( this ._frontAxisBodyLeft. body , 1 ) ; this . addFriction ( this ._frontAxisBodyRight. body , 1 ) ;
if ( this . drive > 0 ) { // this ._acceleration = this ._accelerationForward; this . setLinearDamping ( this ._linearDamping ) ; this . setAngularDamping ( this ._angularDamping ) ; } else { // this ._acceleration = this ._accelerationBackwards; this . setLinearDamping ( this ._linearDamping ) ; this . setAngularDamping ( this ._angularDamping ) ; } this . addFriction ( this ._rearAxisBodyLeft. body , 0 ) ; this . addFriction ( this ._rearAxisBodyRight. body , 0 ) ; this . addFriction ( this ._frontAxisBodyLeft. body , 1 ) ; this . addFriction ( this ._frontAxisBodyRight. body , 1 ) ;
if ( this . drive > 0 ) { // this ._acceleration = this ._accelerationForward; this . setLinearDamping ( this ._linearDamping ) ; this . setAngularDamping ( this ._angularDamping ) ; } else { // this ._acceleration = this ._accelerationBackwards; this . setLinearDamping ( this ._linearDamping ) ; this . setAngularDamping ( this ._angularDamping ) ; } this . addFriction ( this ._rearAxisBodyLeft. body , 0 ) ; this . addFriction ( this ._rearAxisBodyRight. body , 0 ) ; this . addFriction ( this ._frontAxisBodyLeft. body , 1 ) ; this . addFriction ( this ._frontAxisBodyRight. body , 1 ) ;
if ( this . drive > 0 ) { // this ._acceleration = this ._accelerationForward; this . setLinearDamping ( this ._linearDamping ) ; this . setAngularDamping ( this ._angularDamping ) ; } else { // this ._acceleration = this ._accelerationBackwards; this . setLinearDamping ( this ._linearDamping ) ; this . setAngularDamping ( this ._angularDamping ) ; } this . addFriction ( this ._rearAxisBodyLeft. body , 0 ) ; this . addFriction ( this ._rearAxisBodyRight. body , 0 ) ; this . addFriction ( this ._frontAxisBodyLeft. body , 1 ) ; this . addFriction ( this ._frontAxisBodyRight. body , 1 ) ;
3) setLinearDamping()およびsetAngularDamping()
private function setLinearDamping ( linDamp: Number ) : void { this ._frontAxisBodyLeft. body . m_linearDamping = linDamp; this ._frontAxisBodyRight. body . m_linearDamping = linDamp; this ._rearAxisBodyLeft. body . m_linearDamping = linDamp; this ._rearAxisBodyRight. body . m_linearDamping = linDamp; this ._carBody. body . m_linearDamping = linDamp; return ; } private function setAngularDamping ( angDamp: Number ) : void { this ._frontAxisBodyLeft. body . m_angularDamping = angDamp; this ._frontAxisBodyRight. body . m_angularDamping = angDamp; this ._rearAxisBodyLeft. body . m_angularDamping = angDamp; this ._rearAxisBodyRight. body . m_angularDamping = angDamp; this ._carBody. body . m_angularDamping = angDamp; return ; }
private function setLinearDamping ( linDamp: Number ) : void { this ._frontAxisBodyLeft. body . m_linearDamping = linDamp; this ._frontAxisBodyRight. body . m_linearDamping = linDamp; this ._rearAxisBodyLeft. body . m_linearDamping = linDamp; this ._rearAxisBodyRight. body . m_linearDamping = linDamp; this ._carBody. body . m_linearDamping = linDamp; return ; } private function setAngularDamping ( angDamp: Number ) : void { this ._frontAxisBodyLeft. body . m_angularDamping = angDamp; this ._frontAxisBodyRight. body . m_angularDamping = angDamp; this ._rearAxisBodyLeft. body . m_angularDamping = angDamp; this ._rearAxisBodyRight. body . m_angularDamping = angDamp; this ._carBody. body . m_angularDamping = angDamp; return ; }
private function setLinearDamping ( linDamp: Number ) : void { this ._frontAxisBodyLeft. body . m_linearDamping = linDamp; this ._frontAxisBodyRight. body . m_linearDamping = linDamp; this ._rearAxisBodyLeft. body . m_linearDamping = linDamp; this ._rearAxisBodyRight. body . m_linearDamping = linDamp; this ._carBody. body . m_linearDamping = linDamp; return ; } private function setAngularDamping ( angDamp: Number ) : void { this ._frontAxisBodyLeft. body . m_angularDamping = angDamp; this ._frontAxisBodyRight. body . m_angularDamping = angDamp; this ._rearAxisBodyLeft. body . m_angularDamping = angDamp; this ._rearAxisBodyRight. body . m_angularDamping = angDamp; this ._carBody. body . m_angularDamping = angDamp; return ; }
private function setLinearDamping ( linDamp: Number ) : void { this ._frontAxisBodyLeft. body . m_linearDamping = linDamp; this ._frontAxisBodyRight. body . m_linearDamping = linDamp; this ._rearAxisBodyLeft. body . m_linearDamping = linDamp; this ._rearAxisBodyRight. body . m_linearDamping = linDamp; this ._carBody. body . m_linearDamping = linDamp; return ; } private function setAngularDamping ( angDamp: Number ) : void { this ._frontAxisBodyLeft. body . m_angularDamping = angDamp; this ._frontAxisBodyRight. body . m_angularDamping = angDamp; this ._rearAxisBodyLeft. body . m_angularDamping = angDamp; this ._rearAxisBodyRight. body . m_angularDamping = angDamp; this ._carBody. body . m_angularDamping = angDamp; return ; }
private function setLinearDamping ( linDamp: Number ) : void { this ._frontAxisBodyLeft. body . m_linearDamping = linDamp; this ._frontAxisBodyRight. body . m_linearDamping = linDamp; this ._rearAxisBodyLeft. body . m_linearDamping = linDamp; this ._rearAxisBodyRight. body . m_linearDamping = linDamp; this ._carBody. body . m_linearDamping = linDamp; return ; } private function setAngularDamping ( angDamp: Number ) : void { this ._frontAxisBodyLeft. body . m_angularDamping = angDamp; this ._frontAxisBodyRight. body . m_angularDamping = angDamp; this ._rearAxisBodyLeft. body . m_angularDamping = angDamp; this ._rearAxisBodyRight. body . m_angularDamping = angDamp; this ._carBody. body . m_angularDamping = angDamp; return ; }
private function setLinearDamping ( linDamp: Number ) : void { this ._frontAxisBodyLeft. body . m_linearDamping = linDamp; this ._frontAxisBodyRight. body . m_linearDamping = linDamp; this ._rearAxisBodyLeft. body . m_linearDamping = linDamp; this ._rearAxisBodyRight. body . m_linearDamping = linDamp; this ._carBody. body . m_linearDamping = linDamp; return ; } private function setAngularDamping ( angDamp: Number ) : void { this ._frontAxisBodyLeft. body . m_angularDamping = angDamp; this ._frontAxisBodyRight. body . m_angularDamping = angDamp; this ._rearAxisBodyLeft. body . m_angularDamping = angDamp; this ._rearAxisBodyRight. body . m_angularDamping = angDamp; this ._carBody. body . m_angularDamping = angDamp; return ; }
private function setLinearDamping ( linDamp: Number ) : void { this ._frontAxisBodyLeft. body . m_linearDamping = linDamp; this ._frontAxisBodyRight. body . m_linearDamping = linDamp; this ._rearAxisBodyLeft. body . m_linearDamping = linDamp; this ._rearAxisBodyRight. body . m_linearDamping = linDamp; this ._carBody. body . m_linearDamping = linDamp; return ; } private function setAngularDamping ( angDamp: Number ) : void { this ._frontAxisBodyLeft. body . m_angularDamping = angDamp; this ._frontAxisBodyRight. body . m_angularDamping = angDamp; this ._rearAxisBodyLeft. body . m_angularDamping = angDamp; this ._rearAxisBodyRight. body . m_angularDamping = angDamp; this ._carBody. body . m_angularDamping = angDamp; return ; }
private function setLinearDamping ( linDamp: Number ) : void { this ._frontAxisBodyLeft. body . m_linearDamping = linDamp; this ._frontAxisBodyRight. body . m_linearDamping = linDamp; this ._rearAxisBodyLeft. body . m_linearDamping = linDamp; this ._rearAxisBodyRight. body . m_linearDamping = linDamp; this ._carBody. body . m_linearDamping = linDamp; return ; } private function setAngularDamping ( angDamp: Number ) : void { this ._frontAxisBodyLeft. body . m_angularDamping = angDamp; this ._frontAxisBodyRight. body . m_angularDamping = angDamp; this ._rearAxisBodyLeft. body . m_angularDamping = angDamp; this ._rearAxisBodyRight. body . m_angularDamping = angDamp; this ._carBody. body . m_angularDamping = angDamp; return ; }
private function setLinearDamping ( linDamp: Number ) : void { this ._frontAxisBodyLeft. body . m_linearDamping = linDamp; this ._frontAxisBodyRight. body . m_linearDamping = linDamp; this ._rearAxisBodyLeft. body . m_linearDamping = linDamp; this ._rearAxisBodyRight. body . m_linearDamping = linDamp; this ._carBody. body . m_linearDamping = linDamp; return ; } private function setAngularDamping ( angDamp: Number ) : void { this ._frontAxisBodyLeft. body . m_angularDamping = angDamp; this ._frontAxisBodyRight. body . m_angularDamping = angDamp; this ._rearAxisBodyLeft. body . m_angularDamping = angDamp; this ._rearAxisBodyRight. body . m_angularDamping = angDamp; this ._carBody. body . m_angularDamping = angDamp; return ; }
private function setLinearDamping ( linDamp: Number ) : void { this ._frontAxisBodyLeft. body . m_linearDamping = linDamp; this ._frontAxisBodyRight. body . m_linearDamping = linDamp; this ._rearAxisBodyLeft. body . m_linearDamping = linDamp; this ._rearAxisBodyRight. body . m_linearDamping = linDamp; this ._carBody. body . m_linearDamping = linDamp; return ; } private function setAngularDamping ( angDamp: Number ) : void { this ._frontAxisBodyLeft. body . m_angularDamping = angDamp; this ._frontAxisBodyRight. body . m_angularDamping = angDamp; this ._rearAxisBodyLeft. body . m_angularDamping = angDamp; this ._rearAxisBodyRight. body . m_angularDamping = angDamp; this ._carBody. body . m_angularDamping = angDamp; return ; }
private function setLinearDamping ( linDamp: Number ) : void { this ._frontAxisBodyLeft. body . m_linearDamping = linDamp; this ._frontAxisBodyRight. body . m_linearDamping = linDamp; this ._rearAxisBodyLeft. body . m_linearDamping = linDamp; this ._rearAxisBodyRight. body . m_linearDamping = linDamp; this ._carBody. body . m_linearDamping = linDamp; return ; } private function setAngularDamping ( angDamp: Number ) : void { this ._frontAxisBodyLeft. body . m_angularDamping = angDamp; this ._frontAxisBodyRight. body . m_angularDamping = angDamp; this ._rearAxisBodyLeft. body . m_angularDamping = angDamp; this ._rearAxisBodyRight. body . m_angularDamping = angDamp; this ._carBody. body . m_angularDamping = angDamp; return ; }
private function setLinearDamping ( linDamp: Number ) : void { this ._frontAxisBodyLeft. body . m_linearDamping = linDamp; this ._frontAxisBodyRight. body . m_linearDamping = linDamp; this ._rearAxisBodyLeft. body . m_linearDamping = linDamp; this ._rearAxisBodyRight. body . m_linearDamping = linDamp; this ._carBody. body . m_linearDamping = linDamp; return ; } private function setAngularDamping ( angDamp: Number ) : void { this ._frontAxisBodyLeft. body . m_angularDamping = angDamp; this ._frontAxisBodyRight. body . m_angularDamping = angDamp; this ._rearAxisBodyLeft. body . m_angularDamping = angDamp; this ._rearAxisBodyRight. body . m_angularDamping = angDamp; this ._carBody. body . m_angularDamping = angDamp; return ; }
private function setLinearDamping ( linDamp: Number ) : void { this ._frontAxisBodyLeft. body . m_linearDamping = linDamp; this ._frontAxisBodyRight. body . m_linearDamping = linDamp; this ._rearAxisBodyLeft. body . m_linearDamping = linDamp; this ._rearAxisBodyRight. body . m_linearDamping = linDamp; this ._carBody. body . m_linearDamping = linDamp; return ; } private function setAngularDamping ( angDamp: Number ) : void { this ._frontAxisBodyLeft. body . m_angularDamping = angDamp; this ._frontAxisBodyRight. body . m_angularDamping = angDamp; this ._rearAxisBodyLeft. body . m_angularDamping = angDamp; this ._rearAxisBodyRight. body . m_angularDamping = angDamp; this ._carBody. body . m_angularDamping = angDamp; return ; }
private function setLinearDamping ( linDamp: Number ) : void { this ._frontAxisBodyLeft. body . m_linearDamping = linDamp; this ._frontAxisBodyRight. body . m_linearDamping = linDamp; this ._rearAxisBodyLeft. body . m_linearDamping = linDamp; this ._rearAxisBodyRight. body . m_linearDamping = linDamp; this ._carBody. body . m_linearDamping = linDamp; return ; } private function setAngularDamping ( angDamp: Number ) : void { this ._frontAxisBodyLeft. body . m_angularDamping = angDamp; this ._frontAxisBodyRight. body . m_angularDamping = angDamp; this ._rearAxisBodyLeft. body . m_angularDamping = angDamp; this ._rearAxisBodyRight. body . m_angularDamping = angDamp; this ._carBody. body . m_angularDamping = angDamp; return ; }
private function setLinearDamping ( linDamp: Number ) : void { this ._frontAxisBodyLeft. body . m_linearDamping = linDamp; this ._frontAxisBodyRight. body . m_linearDamping = linDamp; this ._rearAxisBodyLeft. body . m_linearDamping = linDamp; this ._rearAxisBodyRight. body . m_linearDamping = linDamp; this ._carBody. body . m_linearDamping = linDamp; return ; } private function setAngularDamping ( angDamp: Number ) : void { this ._frontAxisBodyLeft. body . m_angularDamping = angDamp; this ._frontAxisBodyRight. body . m_angularDamping = angDamp; this ._rearAxisBodyLeft. body . m_angularDamping = angDamp; this ._rearAxisBodyRight. body . m_angularDamping = angDamp; this ._carBody. body . m_angularDamping = angDamp; return ; }
private function setLinearDamping ( linDamp: Number ) : void { this ._frontAxisBodyLeft. body . m_linearDamping = linDamp; this ._frontAxisBodyRight. body . m_linearDamping = linDamp; this ._rearAxisBodyLeft. body . m_linearDamping = linDamp; this ._rearAxisBodyRight. body . m_linearDamping = linDamp; this ._carBody. body . m_linearDamping = linDamp; return ; } private function setAngularDamping ( angDamp: Number ) : void { this ._frontAxisBodyLeft. body . m_angularDamping = angDamp; this ._frontAxisBodyRight. body . m_angularDamping = angDamp; this ._rearAxisBodyLeft. body . m_angularDamping = angDamp; this ._rearAxisBodyRight. body . m_angularDamping = angDamp; this ._carBody. body . m_angularDamping = angDamp; return ; }
private function setLinearDamping ( linDamp: Number ) : void { this ._frontAxisBodyLeft. body . m_linearDamping = linDamp; this ._frontAxisBodyRight. body . m_linearDamping = linDamp; this ._rearAxisBodyLeft. body . m_linearDamping = linDamp; this ._rearAxisBodyRight. body . m_linearDamping = linDamp; this ._carBody. body . m_linearDamping = linDamp; return ; } private function setAngularDamping ( angDamp: Number ) : void { this ._frontAxisBodyLeft. body . m_angularDamping = angDamp; this ._frontAxisBodyRight. body . m_angularDamping = angDamp; this ._rearAxisBodyLeft. body . m_angularDamping = angDamp; this ._rearAxisBodyRight. body . m_angularDamping = angDamp; this ._carBody. body . m_angularDamping = angDamp; return ; }
private function setLinearDamping ( linDamp: Number ) : void { this ._frontAxisBodyLeft. body . m_linearDamping = linDamp; this ._frontAxisBodyRight. body . m_linearDamping = linDamp; this ._rearAxisBodyLeft. body . m_linearDamping = linDamp; this ._rearAxisBodyRight. body . m_linearDamping = linDamp; this ._carBody. body . m_linearDamping = linDamp; return ; } private function setAngularDamping ( angDamp: Number ) : void { this ._frontAxisBodyLeft. body . m_angularDamping = angDamp; this ._frontAxisBodyRight. body . m_angularDamping = angDamp; this ._rearAxisBodyLeft. body . m_angularDamping = angDamp; this ._rearAxisBodyRight. body . m_angularDamping = angDamp; this ._carBody. body . m_angularDamping = angDamp; return ; }
4)さて、私の意見では、最も興味深いaddFriction()手続きで、その実装を探しましたが、長い間見つけられなかったので、今では自分で実装しました。
- 関数 addFriction ( targetBody:b2Body、isFront: Number )
- {
- var spd、spd2:b2Vec2;
- spd = targetBody。 GetLinearVelocity ( ) ;
- spd2 = targetBody。 GetLocalVector ( spd ) ;
- if ( this ._privod == FWD ) { //前輪駆動
- if ( isFront == 1 ) {
- spd2。 y = spd2 y * 0.5 ;
- }
- その他 {
- spd2。 y = spd2 y > 2.5 ? spd2。 y * 0.45 : 0 ;
- }
- spd = targetBody。 GetWorldVector ( spd2 ) ;
- targetBody。 SetLinearVelocity ( spd ) ;
- }
- if ( this ._privod == RWD ) {
- if ( isFront == 1 ) {
- spd2。 y = 0 ;
- spd2。 x = spd2。 x * .9;
- spd = targetBody。 GetWorldVector ( spd2 ) ;
- targetBody。 SetLinearVelocity ( spd ) ;
- }
- その他 {
- spd2。 y = spd2 y > 2.5 ? spd2。 y * 0.25 : 0 ;
- spd = targetBody。 GetWorldVector ( spd2 ) ;
- targetBody。 SetLinearVelocity ( spd ) ;
- }
- }
- }
この手順は、各ホイールのグローバル速度ベクトルspdをローカルspd2に分解し、XとYに沿って摩擦を適用します。頭に合わない唯一のことは、軸が時計回りに90%回転する理由だけです。 つまり、車を滑りから離し、上でスケッチしたX軸に沿って摩擦を追加するには、Y軸に摩擦を追加する必要があります(ホイールの横摩擦でもあります)。
5) 加速()を補完し続け、速度と加速の力を適用する角度を計算します(前輪の場合):
- var carAngle: 数値 = this ._carBody。 体の GetAngle ( ) ;
- if ( this。steer ! = 0 ) { //前進するとき
- this ._steerAngle = this ._steerAngle + this 。 steer * this ._steeringAcceleration;
- }
- if ( this ._steerAngle > carAngle + this ._steeringRange ) {
- this ._steerAngle = carAngle + this ._steeringRange;
- }
- else if ( this ._steerAngle < carAngle- this ._steeringRange ) {
- this ._steerAngle = carAngle- this ._steeringRange;
- }
- if ( this。drive < 0 ) { //後退するとき
- if ( this。steer == 0 ) {
- this ._steerAngle = carAngle;
- }
- else if ( this。steer ==- 1 ) {
- this ._steerAngle = carAngle- this ._steeringRange;
- }
- else if ( this。steer == 1 ) {
- this ._steerAngle = carAngle + this ._steeringRange;
- }
- }
- if ( this。steer == 0 ) {
- this ._steerAngle = carAngle;
- }
6)前輪を回します:
- この ._frontAxisBodyLeft。 体の SetXForm ( _frontAxisBodyLeft。Body。GetXForm ( ) 。 Position 、 this ._steerAngle ) ;
- この ._frontAxisBodyRight。 体の SetXForm ( _frontAxisBodyRight。Body。GetXForm ( ) 。 Position 、 this ._steerAngle ) ;
7)さて、ドライブに応じて、必要な車輪に必要な力を加えます:
var carspeedX, carspeedY, carRearX,carRearY: Number ; if ( this ._privod == FWD ) { // carspeedX = this . drive * Math . cos ( this ._steerAngle ) * ( this ._acceleration ) ; carspeedY = this . drive * Math . sin ( this ._steerAngle ) * ( this ._acceleration ) ; } if ( this ._privod == AWD ) { carspeedX = this . drive * Math . cos ( this ._steerAngle ) * ( this ._acceleration ) ; carspeedY = this . drive * Math . sin ( this ._steerAngle ) * ( this ._acceleration ) ; carRearX = this . drive * Math . cos ( this ._rearAxisBodyRight. angle ) * ( this ._acceleration ) ; carRearY = this . drive * Math . sin ( this ._rearAxisBodyRight. angle ) * ( this ._acceleration ) ; } if ( this . drive ! = 0 ) { if ( this ._privod == FWD ) { // , ( ) this ._frontAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._frontAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; } if ( this ._privod == AWD ) // , ( ) { this ._frontAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._frontAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._rearAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carRearX, carRearY ) ) ; this ._rearAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carRearX, carRearY ) ) ; } } else { // spd = this . speed ; if ( spd > this ._friction ) { spd = spd - this ._friction / 1.3 ; } else { spd = 0 ; } if ( this ._privod == FWD ) // , ( ) { carspeedX = Math . cos ( this ._steerAngle ) * spd; carspeedY = Math . sin ( this ._steerAngle ) * spd; this ._frontAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._frontAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; } if ( this ._privod == AWD ) { // , ( ) carspeedX = Math . cos ( this ._steerAngle ) * spd; carspeedY = Math . sin ( this ._steerAngle ) * spd; this ._frontAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._frontAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; carspeedX = Math . cos ( this ._carBody. angle ) * spd; carspeedY = Math . sin ( this ._carBody. angle ) * spd; this ._rearAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._rearAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; } }
var carspeedX, carspeedY, carRearX,carRearY: Number ; if ( this ._privod == FWD ) { // carspeedX = this . drive * Math . cos ( this ._steerAngle ) * ( this ._acceleration ) ; carspeedY = this . drive * Math . sin ( this ._steerAngle ) * ( this ._acceleration ) ; } if ( this ._privod == AWD ) { carspeedX = this . drive * Math . cos ( this ._steerAngle ) * ( this ._acceleration ) ; carspeedY = this . drive * Math . sin ( this ._steerAngle ) * ( this ._acceleration ) ; carRearX = this . drive * Math . cos ( this ._rearAxisBodyRight. angle ) * ( this ._acceleration ) ; carRearY = this . drive * Math . sin ( this ._rearAxisBodyRight. angle ) * ( this ._acceleration ) ; } if ( this . drive ! = 0 ) { if ( this ._privod == FWD ) { // , ( ) this ._frontAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._frontAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; } if ( this ._privod == AWD ) // , ( ) { this ._frontAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._frontAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._rearAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carRearX, carRearY ) ) ; this ._rearAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carRearX, carRearY ) ) ; } } else { // spd = this . speed ; if ( spd > this ._friction ) { spd = spd - this ._friction / 1.3 ; } else { spd = 0 ; } if ( this ._privod == FWD ) // , ( ) { carspeedX = Math . cos ( this ._steerAngle ) * spd; carspeedY = Math . sin ( this ._steerAngle ) * spd; this ._frontAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._frontAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; } if ( this ._privod == AWD ) { // , ( ) carspeedX = Math . cos ( this ._steerAngle ) * spd; carspeedY = Math . sin ( this ._steerAngle ) * spd; this ._frontAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._frontAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; carspeedX = Math . cos ( this ._carBody. angle ) * spd; carspeedY = Math . sin ( this ._carBody. angle ) * spd; this ._rearAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._rearAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; } }
var carspeedX, carspeedY, carRearX,carRearY: Number ; if ( this ._privod == FWD ) { // carspeedX = this . drive * Math . cos ( this ._steerAngle ) * ( this ._acceleration ) ; carspeedY = this . drive * Math . sin ( this ._steerAngle ) * ( this ._acceleration ) ; } if ( this ._privod == AWD ) { carspeedX = this . drive * Math . cos ( this ._steerAngle ) * ( this ._acceleration ) ; carspeedY = this . drive * Math . sin ( this ._steerAngle ) * ( this ._acceleration ) ; carRearX = this . drive * Math . cos ( this ._rearAxisBodyRight. angle ) * ( this ._acceleration ) ; carRearY = this . drive * Math . sin ( this ._rearAxisBodyRight. angle ) * ( this ._acceleration ) ; } if ( this . drive ! = 0 ) { if ( this ._privod == FWD ) { // , ( ) this ._frontAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._frontAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; } if ( this ._privod == AWD ) // , ( ) { this ._frontAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._frontAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._rearAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carRearX, carRearY ) ) ; this ._rearAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carRearX, carRearY ) ) ; } } else { // spd = this . speed ; if ( spd > this ._friction ) { spd = spd - this ._friction / 1.3 ; } else { spd = 0 ; } if ( this ._privod == FWD ) // , ( ) { carspeedX = Math . cos ( this ._steerAngle ) * spd; carspeedY = Math . sin ( this ._steerAngle ) * spd; this ._frontAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._frontAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; } if ( this ._privod == AWD ) { // , ( ) carspeedX = Math . cos ( this ._steerAngle ) * spd; carspeedY = Math . sin ( this ._steerAngle ) * spd; this ._frontAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._frontAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; carspeedX = Math . cos ( this ._carBody. angle ) * spd; carspeedY = Math . sin ( this ._carBody. angle ) * spd; this ._rearAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._rearAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; } }
var carspeedX, carspeedY, carRearX,carRearY: Number ; if ( this ._privod == FWD ) { // carspeedX = this . drive * Math . cos ( this ._steerAngle ) * ( this ._acceleration ) ; carspeedY = this . drive * Math . sin ( this ._steerAngle ) * ( this ._acceleration ) ; } if ( this ._privod == AWD ) { carspeedX = this . drive * Math . cos ( this ._steerAngle ) * ( this ._acceleration ) ; carspeedY = this . drive * Math . sin ( this ._steerAngle ) * ( this ._acceleration ) ; carRearX = this . drive * Math . cos ( this ._rearAxisBodyRight. angle ) * ( this ._acceleration ) ; carRearY = this . drive * Math . sin ( this ._rearAxisBodyRight. angle ) * ( this ._acceleration ) ; } if ( this . drive ! = 0 ) { if ( this ._privod == FWD ) { // , ( ) this ._frontAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._frontAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; } if ( this ._privod == AWD ) // , ( ) { this ._frontAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._frontAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._rearAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carRearX, carRearY ) ) ; this ._rearAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carRearX, carRearY ) ) ; } } else { // spd = this . speed ; if ( spd > this ._friction ) { spd = spd - this ._friction / 1.3 ; } else { spd = 0 ; } if ( this ._privod == FWD ) // , ( ) { carspeedX = Math . cos ( this ._steerAngle ) * spd; carspeedY = Math . sin ( this ._steerAngle ) * spd; this ._frontAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._frontAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; } if ( this ._privod == AWD ) { // , ( ) carspeedX = Math . cos ( this ._steerAngle ) * spd; carspeedY = Math . sin ( this ._steerAngle ) * spd; this ._frontAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._frontAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; carspeedX = Math . cos ( this ._carBody. angle ) * spd; carspeedY = Math . sin ( this ._carBody. angle ) * spd; this ._rearAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._rearAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; } }
var carspeedX, carspeedY, carRearX,carRearY: Number ; if ( this ._privod == FWD ) { // carspeedX = this . drive * Math . cos ( this ._steerAngle ) * ( this ._acceleration ) ; carspeedY = this . drive * Math . sin ( this ._steerAngle ) * ( this ._acceleration ) ; } if ( this ._privod == AWD ) { carspeedX = this . drive * Math . cos ( this ._steerAngle ) * ( this ._acceleration ) ; carspeedY = this . drive * Math . sin ( this ._steerAngle ) * ( this ._acceleration ) ; carRearX = this . drive * Math . cos ( this ._rearAxisBodyRight. angle ) * ( this ._acceleration ) ; carRearY = this . drive * Math . sin ( this ._rearAxisBodyRight. angle ) * ( this ._acceleration ) ; } if ( this . drive ! = 0 ) { if ( this ._privod == FWD ) { // , ( ) this ._frontAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._frontAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; } if ( this ._privod == AWD ) // , ( ) { this ._frontAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._frontAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._rearAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carRearX, carRearY ) ) ; this ._rearAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carRearX, carRearY ) ) ; } } else { // spd = this . speed ; if ( spd > this ._friction ) { spd = spd - this ._friction / 1.3 ; } else { spd = 0 ; } if ( this ._privod == FWD ) // , ( ) { carspeedX = Math . cos ( this ._steerAngle ) * spd; carspeedY = Math . sin ( this ._steerAngle ) * spd; this ._frontAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._frontAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; } if ( this ._privod == AWD ) { // , ( ) carspeedX = Math . cos ( this ._steerAngle ) * spd; carspeedY = Math . sin ( this ._steerAngle ) * spd; this ._frontAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._frontAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; carspeedX = Math . cos ( this ._carBody. angle ) * spd; carspeedY = Math . sin ( this ._carBody. angle ) * spd; this ._rearAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._rearAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; } }
var carspeedX, carspeedY, carRearX,carRearY: Number ; if ( this ._privod == FWD ) { // carspeedX = this . drive * Math . cos ( this ._steerAngle ) * ( this ._acceleration ) ; carspeedY = this . drive * Math . sin ( this ._steerAngle ) * ( this ._acceleration ) ; } if ( this ._privod == AWD ) { carspeedX = this . drive * Math . cos ( this ._steerAngle ) * ( this ._acceleration ) ; carspeedY = this . drive * Math . sin ( this ._steerAngle ) * ( this ._acceleration ) ; carRearX = this . drive * Math . cos ( this ._rearAxisBodyRight. angle ) * ( this ._acceleration ) ; carRearY = this . drive * Math . sin ( this ._rearAxisBodyRight. angle ) * ( this ._acceleration ) ; } if ( this . drive ! = 0 ) { if ( this ._privod == FWD ) { // , ( ) this ._frontAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._frontAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; } if ( this ._privod == AWD ) // , ( ) { this ._frontAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._frontAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._rearAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carRearX, carRearY ) ) ; this ._rearAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carRearX, carRearY ) ) ; } } else { // spd = this . speed ; if ( spd > this ._friction ) { spd = spd - this ._friction / 1.3 ; } else { spd = 0 ; } if ( this ._privod == FWD ) // , ( ) { carspeedX = Math . cos ( this ._steerAngle ) * spd; carspeedY = Math . sin ( this ._steerAngle ) * spd; this ._frontAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._frontAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; } if ( this ._privod == AWD ) { // , ( ) carspeedX = Math . cos ( this ._steerAngle ) * spd; carspeedY = Math . sin ( this ._steerAngle ) * spd; this ._frontAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._frontAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; carspeedX = Math . cos ( this ._carBody. angle ) * spd; carspeedY = Math . sin ( this ._carBody. angle ) * spd; this ._rearAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._rearAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; } }
var carspeedX, carspeedY, carRearX,carRearY: Number ; if ( this ._privod == FWD ) { // carspeedX = this . drive * Math . cos ( this ._steerAngle ) * ( this ._acceleration ) ; carspeedY = this . drive * Math . sin ( this ._steerAngle ) * ( this ._acceleration ) ; } if ( this ._privod == AWD ) { carspeedX = this . drive * Math . cos ( this ._steerAngle ) * ( this ._acceleration ) ; carspeedY = this . drive * Math . sin ( this ._steerAngle ) * ( this ._acceleration ) ; carRearX = this . drive * Math . cos ( this ._rearAxisBodyRight. angle ) * ( this ._acceleration ) ; carRearY = this . drive * Math . sin ( this ._rearAxisBodyRight. angle ) * ( this ._acceleration ) ; } if ( this . drive ! = 0 ) { if ( this ._privod == FWD ) { // , ( ) this ._frontAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._frontAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; } if ( this ._privod == AWD ) // , ( ) { this ._frontAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._frontAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._rearAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carRearX, carRearY ) ) ; this ._rearAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carRearX, carRearY ) ) ; } } else { // spd = this . speed ; if ( spd > this ._friction ) { spd = spd - this ._friction / 1.3 ; } else { spd = 0 ; } if ( this ._privod == FWD ) // , ( ) { carspeedX = Math . cos ( this ._steerAngle ) * spd; carspeedY = Math . sin ( this ._steerAngle ) * spd; this ._frontAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._frontAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; } if ( this ._privod == AWD ) { // , ( ) carspeedX = Math . cos ( this ._steerAngle ) * spd; carspeedY = Math . sin ( this ._steerAngle ) * spd; this ._frontAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._frontAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; carspeedX = Math . cos ( this ._carBody. angle ) * spd; carspeedY = Math . sin ( this ._carBody. angle ) * spd; this ._rearAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._rearAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; } }
var carspeedX, carspeedY, carRearX,carRearY: Number ; if ( this ._privod == FWD ) { // carspeedX = this . drive * Math . cos ( this ._steerAngle ) * ( this ._acceleration ) ; carspeedY = this . drive * Math . sin ( this ._steerAngle ) * ( this ._acceleration ) ; } if ( this ._privod == AWD ) { carspeedX = this . drive * Math . cos ( this ._steerAngle ) * ( this ._acceleration ) ; carspeedY = this . drive * Math . sin ( this ._steerAngle ) * ( this ._acceleration ) ; carRearX = this . drive * Math . cos ( this ._rearAxisBodyRight. angle ) * ( this ._acceleration ) ; carRearY = this . drive * Math . sin ( this ._rearAxisBodyRight. angle ) * ( this ._acceleration ) ; } if ( this . drive ! = 0 ) { if ( this ._privod == FWD ) { // , ( ) this ._frontAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._frontAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; } if ( this ._privod == AWD ) // , ( ) { this ._frontAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._frontAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._rearAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carRearX, carRearY ) ) ; this ._rearAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carRearX, carRearY ) ) ; } } else { // spd = this . speed ; if ( spd > this ._friction ) { spd = spd - this ._friction / 1.3 ; } else { spd = 0 ; } if ( this ._privod == FWD ) // , ( ) { carspeedX = Math . cos ( this ._steerAngle ) * spd; carspeedY = Math . sin ( this ._steerAngle ) * spd; this ._frontAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._frontAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; } if ( this ._privod == AWD ) { // , ( ) carspeedX = Math . cos ( this ._steerAngle ) * spd; carspeedY = Math . sin ( this ._steerAngle ) * spd; this ._frontAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._frontAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; carspeedX = Math . cos ( this ._carBody. angle ) * spd; carspeedY = Math . sin ( this ._carBody. angle ) * spd; this ._rearAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._rearAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; } }
var carspeedX, carspeedY, carRearX,carRearY: Number ; if ( this ._privod == FWD ) { // carspeedX = this . drive * Math . cos ( this ._steerAngle ) * ( this ._acceleration ) ; carspeedY = this . drive * Math . sin ( this ._steerAngle ) * ( this ._acceleration ) ; } if ( this ._privod == AWD ) { carspeedX = this . drive * Math . cos ( this ._steerAngle ) * ( this ._acceleration ) ; carspeedY = this . drive * Math . sin ( this ._steerAngle ) * ( this ._acceleration ) ; carRearX = this . drive * Math . cos ( this ._rearAxisBodyRight. angle ) * ( this ._acceleration ) ; carRearY = this . drive * Math . sin ( this ._rearAxisBodyRight. angle ) * ( this ._acceleration ) ; } if ( this . drive ! = 0 ) { if ( this ._privod == FWD ) { // , ( ) this ._frontAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._frontAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; } if ( this ._privod == AWD ) // , ( ) { this ._frontAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._frontAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._rearAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carRearX, carRearY ) ) ; this ._rearAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carRearX, carRearY ) ) ; } } else { // spd = this . speed ; if ( spd > this ._friction ) { spd = spd - this ._friction / 1.3 ; } else { spd = 0 ; } if ( this ._privod == FWD ) // , ( ) { carspeedX = Math . cos ( this ._steerAngle ) * spd; carspeedY = Math . sin ( this ._steerAngle ) * spd; this ._frontAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._frontAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; } if ( this ._privod == AWD ) { // , ( ) carspeedX = Math . cos ( this ._steerAngle ) * spd; carspeedY = Math . sin ( this ._steerAngle ) * spd; this ._frontAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._frontAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; carspeedX = Math . cos ( this ._carBody. angle ) * spd; carspeedY = Math . sin ( this ._carBody. angle ) * spd; this ._rearAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._rearAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; } }
var carspeedX, carspeedY, carRearX,carRearY: Number ; if ( this ._privod == FWD ) { // carspeedX = this . drive * Math . cos ( this ._steerAngle ) * ( this ._acceleration ) ; carspeedY = this . drive * Math . sin ( this ._steerAngle ) * ( this ._acceleration ) ; } if ( this ._privod == AWD ) { carspeedX = this . drive * Math . cos ( this ._steerAngle ) * ( this ._acceleration ) ; carspeedY = this . drive * Math . sin ( this ._steerAngle ) * ( this ._acceleration ) ; carRearX = this . drive * Math . cos ( this ._rearAxisBodyRight. angle ) * ( this ._acceleration ) ; carRearY = this . drive * Math . sin ( this ._rearAxisBodyRight. angle ) * ( this ._acceleration ) ; } if ( this . drive ! = 0 ) { if ( this ._privod == FWD ) { // , ( ) this ._frontAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._frontAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; } if ( this ._privod == AWD ) // , ( ) { this ._frontAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._frontAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._rearAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carRearX, carRearY ) ) ; this ._rearAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carRearX, carRearY ) ) ; } } else { // spd = this . speed ; if ( spd > this ._friction ) { spd = spd - this ._friction / 1.3 ; } else { spd = 0 ; } if ( this ._privod == FWD ) // , ( ) { carspeedX = Math . cos ( this ._steerAngle ) * spd; carspeedY = Math . sin ( this ._steerAngle ) * spd; this ._frontAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._frontAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; } if ( this ._privod == AWD ) { // , ( ) carspeedX = Math . cos ( this ._steerAngle ) * spd; carspeedY = Math . sin ( this ._steerAngle ) * spd; this ._frontAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._frontAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; carspeedX = Math . cos ( this ._carBody. angle ) * spd; carspeedY = Math . sin ( this ._carBody. angle ) * spd; this ._rearAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._rearAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; } }
var carspeedX, carspeedY, carRearX,carRearY: Number ; if ( this ._privod == FWD ) { // carspeedX = this . drive * Math . cos ( this ._steerAngle ) * ( this ._acceleration ) ; carspeedY = this . drive * Math . sin ( this ._steerAngle ) * ( this ._acceleration ) ; } if ( this ._privod == AWD ) { carspeedX = this . drive * Math . cos ( this ._steerAngle ) * ( this ._acceleration ) ; carspeedY = this . drive * Math . sin ( this ._steerAngle ) * ( this ._acceleration ) ; carRearX = this . drive * Math . cos ( this ._rearAxisBodyRight. angle ) * ( this ._acceleration ) ; carRearY = this . drive * Math . sin ( this ._rearAxisBodyRight. angle ) * ( this ._acceleration ) ; } if ( this . drive ! = 0 ) { if ( this ._privod == FWD ) { // , ( ) this ._frontAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._frontAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; } if ( this ._privod == AWD ) // , ( ) { this ._frontAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._frontAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._rearAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carRearX, carRearY ) ) ; this ._rearAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carRearX, carRearY ) ) ; } } else { // spd = this . speed ; if ( spd > this ._friction ) { spd = spd - this ._friction / 1.3 ; } else { spd = 0 ; } if ( this ._privod == FWD ) // , ( ) { carspeedX = Math . cos ( this ._steerAngle ) * spd; carspeedY = Math . sin ( this ._steerAngle ) * spd; this ._frontAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._frontAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; } if ( this ._privod == AWD ) { // , ( ) carspeedX = Math . cos ( this ._steerAngle ) * spd; carspeedY = Math . sin ( this ._steerAngle ) * spd; this ._frontAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._frontAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; carspeedX = Math . cos ( this ._carBody. angle ) * spd; carspeedY = Math . sin ( this ._carBody. angle ) * spd; this ._rearAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._rearAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; } }
var carspeedX, carspeedY, carRearX,carRearY: Number ; if ( this ._privod == FWD ) { // carspeedX = this . drive * Math . cos ( this ._steerAngle ) * ( this ._acceleration ) ; carspeedY = this . drive * Math . sin ( this ._steerAngle ) * ( this ._acceleration ) ; } if ( this ._privod == AWD ) { carspeedX = this . drive * Math . cos ( this ._steerAngle ) * ( this ._acceleration ) ; carspeedY = this . drive * Math . sin ( this ._steerAngle ) * ( this ._acceleration ) ; carRearX = this . drive * Math . cos ( this ._rearAxisBodyRight. angle ) * ( this ._acceleration ) ; carRearY = this . drive * Math . sin ( this ._rearAxisBodyRight. angle ) * ( this ._acceleration ) ; } if ( this . drive ! = 0 ) { if ( this ._privod == FWD ) { // , ( ) this ._frontAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._frontAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; } if ( this ._privod == AWD ) // , ( ) { this ._frontAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._frontAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._rearAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carRearX, carRearY ) ) ; this ._rearAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carRearX, carRearY ) ) ; } } else { // spd = this . speed ; if ( spd > this ._friction ) { spd = spd - this ._friction / 1.3 ; } else { spd = 0 ; } if ( this ._privod == FWD ) // , ( ) { carspeedX = Math . cos ( this ._steerAngle ) * spd; carspeedY = Math . sin ( this ._steerAngle ) * spd; this ._frontAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._frontAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; } if ( this ._privod == AWD ) { // , ( ) carspeedX = Math . cos ( this ._steerAngle ) * spd; carspeedY = Math . sin ( this ._steerAngle ) * spd; this ._frontAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._frontAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; carspeedX = Math . cos ( this ._carBody. angle ) * spd; carspeedY = Math . sin ( this ._carBody. angle ) * spd; this ._rearAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._rearAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; } }
var carspeedX, carspeedY, carRearX,carRearY: Number ; if ( this ._privod == FWD ) { // carspeedX = this . drive * Math . cos ( this ._steerAngle ) * ( this ._acceleration ) ; carspeedY = this . drive * Math . sin ( this ._steerAngle ) * ( this ._acceleration ) ; } if ( this ._privod == AWD ) { carspeedX = this . drive * Math . cos ( this ._steerAngle ) * ( this ._acceleration ) ; carspeedY = this . drive * Math . sin ( this ._steerAngle ) * ( this ._acceleration ) ; carRearX = this . drive * Math . cos ( this ._rearAxisBodyRight. angle ) * ( this ._acceleration ) ; carRearY = this . drive * Math . sin ( this ._rearAxisBodyRight. angle ) * ( this ._acceleration ) ; } if ( this . drive ! = 0 ) { if ( this ._privod == FWD ) { // , ( ) this ._frontAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._frontAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; } if ( this ._privod == AWD ) // , ( ) { this ._frontAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._frontAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._rearAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carRearX, carRearY ) ) ; this ._rearAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carRearX, carRearY ) ) ; } } else { // spd = this . speed ; if ( spd > this ._friction ) { spd = spd - this ._friction / 1.3 ; } else { spd = 0 ; } if ( this ._privod == FWD ) // , ( ) { carspeedX = Math . cos ( this ._steerAngle ) * spd; carspeedY = Math . sin ( this ._steerAngle ) * spd; this ._frontAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._frontAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; } if ( this ._privod == AWD ) { // , ( ) carspeedX = Math . cos ( this ._steerAngle ) * spd; carspeedY = Math . sin ( this ._steerAngle ) * spd; this ._frontAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._frontAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; carspeedX = Math . cos ( this ._carBody. angle ) * spd; carspeedY = Math . sin ( this ._carBody. angle ) * spd; this ._rearAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._rearAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; } }
var carspeedX, carspeedY, carRearX,carRearY: Number ; if ( this ._privod == FWD ) { // carspeedX = this . drive * Math . cos ( this ._steerAngle ) * ( this ._acceleration ) ; carspeedY = this . drive * Math . sin ( this ._steerAngle ) * ( this ._acceleration ) ; } if ( this ._privod == AWD ) { carspeedX = this . drive * Math . cos ( this ._steerAngle ) * ( this ._acceleration ) ; carspeedY = this . drive * Math . sin ( this ._steerAngle ) * ( this ._acceleration ) ; carRearX = this . drive * Math . cos ( this ._rearAxisBodyRight. angle ) * ( this ._acceleration ) ; carRearY = this . drive * Math . sin ( this ._rearAxisBodyRight. angle ) * ( this ._acceleration ) ; } if ( this . drive ! = 0 ) { if ( this ._privod == FWD ) { // , ( ) this ._frontAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._frontAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; } if ( this ._privod == AWD ) // , ( ) { this ._frontAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._frontAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._rearAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carRearX, carRearY ) ) ; this ._rearAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carRearX, carRearY ) ) ; } } else { // spd = this . speed ; if ( spd > this ._friction ) { spd = spd - this ._friction / 1.3 ; } else { spd = 0 ; } if ( this ._privod == FWD ) // , ( ) { carspeedX = Math . cos ( this ._steerAngle ) * spd; carspeedY = Math . sin ( this ._steerAngle ) * spd; this ._frontAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._frontAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; } if ( this ._privod == AWD ) { // , ( ) carspeedX = Math . cos ( this ._steerAngle ) * spd; carspeedY = Math . sin ( this ._steerAngle ) * spd; this ._frontAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._frontAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; carspeedX = Math . cos ( this ._carBody. angle ) * spd; carspeedY = Math . sin ( this ._carBody. angle ) * spd; this ._rearAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._rearAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; } }
var carspeedX, carspeedY, carRearX,carRearY: Number ; if ( this ._privod == FWD ) { // carspeedX = this . drive * Math . cos ( this ._steerAngle ) * ( this ._acceleration ) ; carspeedY = this . drive * Math . sin ( this ._steerAngle ) * ( this ._acceleration ) ; } if ( this ._privod == AWD ) { carspeedX = this . drive * Math . cos ( this ._steerAngle ) * ( this ._acceleration ) ; carspeedY = this . drive * Math . sin ( this ._steerAngle ) * ( this ._acceleration ) ; carRearX = this . drive * Math . cos ( this ._rearAxisBodyRight. angle ) * ( this ._acceleration ) ; carRearY = this . drive * Math . sin ( this ._rearAxisBodyRight. angle ) * ( this ._acceleration ) ; } if ( this . drive ! = 0 ) { if ( this ._privod == FWD ) { // , ( ) this ._frontAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._frontAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; } if ( this ._privod == AWD ) // , ( ) { this ._frontAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._frontAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._rearAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carRearX, carRearY ) ) ; this ._rearAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carRearX, carRearY ) ) ; } } else { // spd = this . speed ; if ( spd > this ._friction ) { spd = spd - this ._friction / 1.3 ; } else { spd = 0 ; } if ( this ._privod == FWD ) // , ( ) { carspeedX = Math . cos ( this ._steerAngle ) * spd; carspeedY = Math . sin ( this ._steerAngle ) * spd; this ._frontAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._frontAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; } if ( this ._privod == AWD ) { // , ( ) carspeedX = Math . cos ( this ._steerAngle ) * spd; carspeedY = Math . sin ( this ._steerAngle ) * spd; this ._frontAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._frontAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; carspeedX = Math . cos ( this ._carBody. angle ) * spd; carspeedY = Math . sin ( this ._carBody. angle ) * spd; this ._rearAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._rearAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; } }
var carspeedX, carspeedY, carRearX,carRearY: Number ; if ( this ._privod == FWD ) { // carspeedX = this . drive * Math . cos ( this ._steerAngle ) * ( this ._acceleration ) ; carspeedY = this . drive * Math . sin ( this ._steerAngle ) * ( this ._acceleration ) ; } if ( this ._privod == AWD ) { carspeedX = this . drive * Math . cos ( this ._steerAngle ) * ( this ._acceleration ) ; carspeedY = this . drive * Math . sin ( this ._steerAngle ) * ( this ._acceleration ) ; carRearX = this . drive * Math . cos ( this ._rearAxisBodyRight. angle ) * ( this ._acceleration ) ; carRearY = this . drive * Math . sin ( this ._rearAxisBodyRight. angle ) * ( this ._acceleration ) ; } if ( this . drive ! = 0 ) { if ( this ._privod == FWD ) { // , ( ) this ._frontAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._frontAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; } if ( this ._privod == AWD ) // , ( ) { this ._frontAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._frontAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._rearAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carRearX, carRearY ) ) ; this ._rearAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carRearX, carRearY ) ) ; } } else { // spd = this . speed ; if ( spd > this ._friction ) { spd = spd - this ._friction / 1.3 ; } else { spd = 0 ; } if ( this ._privod == FWD ) // , ( ) { carspeedX = Math . cos ( this ._steerAngle ) * spd; carspeedY = Math . sin ( this ._steerAngle ) * spd; this ._frontAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._frontAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; } if ( this ._privod == AWD ) { // , ( ) carspeedX = Math . cos ( this ._steerAngle ) * spd; carspeedY = Math . sin ( this ._steerAngle ) * spd; this ._frontAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._frontAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; carspeedX = Math . cos ( this ._carBody. angle ) * spd; carspeedY = Math . sin ( this ._carBody. angle ) * spd; this ._rearAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._rearAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; } }
var carspeedX, carspeedY, carRearX,carRearY: Number ; if ( this ._privod == FWD ) { // carspeedX = this . drive * Math . cos ( this ._steerAngle ) * ( this ._acceleration ) ; carspeedY = this . drive * Math . sin ( this ._steerAngle ) * ( this ._acceleration ) ; } if ( this ._privod == AWD ) { carspeedX = this . drive * Math . cos ( this ._steerAngle ) * ( this ._acceleration ) ; carspeedY = this . drive * Math . sin ( this ._steerAngle ) * ( this ._acceleration ) ; carRearX = this . drive * Math . cos ( this ._rearAxisBodyRight. angle ) * ( this ._acceleration ) ; carRearY = this . drive * Math . sin ( this ._rearAxisBodyRight. angle ) * ( this ._acceleration ) ; } if ( this . drive ! = 0 ) { if ( this ._privod == FWD ) { // , ( ) this ._frontAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._frontAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; } if ( this ._privod == AWD ) // , ( ) { this ._frontAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._frontAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._rearAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carRearX, carRearY ) ) ; this ._rearAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carRearX, carRearY ) ) ; } } else { // spd = this . speed ; if ( spd > this ._friction ) { spd = spd - this ._friction / 1.3 ; } else { spd = 0 ; } if ( this ._privod == FWD ) // , ( ) { carspeedX = Math . cos ( this ._steerAngle ) * spd; carspeedY = Math . sin ( this ._steerAngle ) * spd; this ._frontAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._frontAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; } if ( this ._privod == AWD ) { // , ( ) carspeedX = Math . cos ( this ._steerAngle ) * spd; carspeedY = Math . sin ( this ._steerAngle ) * spd; this ._frontAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._frontAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; carspeedX = Math . cos ( this ._carBody. angle ) * spd; carspeedY = Math . sin ( this ._carBody. angle ) * spd; this ._rearAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._rearAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; } }
var carspeedX, carspeedY, carRearX,carRearY: Number ; if ( this ._privod == FWD ) { // carspeedX = this . drive * Math . cos ( this ._steerAngle ) * ( this ._acceleration ) ; carspeedY = this . drive * Math . sin ( this ._steerAngle ) * ( this ._acceleration ) ; } if ( this ._privod == AWD ) { carspeedX = this . drive * Math . cos ( this ._steerAngle ) * ( this ._acceleration ) ; carspeedY = this . drive * Math . sin ( this ._steerAngle ) * ( this ._acceleration ) ; carRearX = this . drive * Math . cos ( this ._rearAxisBodyRight. angle ) * ( this ._acceleration ) ; carRearY = this . drive * Math . sin ( this ._rearAxisBodyRight. angle ) * ( this ._acceleration ) ; } if ( this . drive ! = 0 ) { if ( this ._privod == FWD ) { // , ( ) this ._frontAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._frontAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; } if ( this ._privod == AWD ) // , ( ) { this ._frontAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._frontAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._rearAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carRearX, carRearY ) ) ; this ._rearAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carRearX, carRearY ) ) ; } } else { // spd = this . speed ; if ( spd > this ._friction ) { spd = spd - this ._friction / 1.3 ; } else { spd = 0 ; } if ( this ._privod == FWD ) // , ( ) { carspeedX = Math . cos ( this ._steerAngle ) * spd; carspeedY = Math . sin ( this ._steerAngle ) * spd; this ._frontAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._frontAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; } if ( this ._privod == AWD ) { // , ( ) carspeedX = Math . cos ( this ._steerAngle ) * spd; carspeedY = Math . sin ( this ._steerAngle ) * spd; this ._frontAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._frontAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; carspeedX = Math . cos ( this ._carBody. angle ) * spd; carspeedY = Math . sin ( this ._carBody. angle ) * spd; this ._rearAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._rearAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; } }
var carspeedX, carspeedY, carRearX,carRearY: Number ; if ( this ._privod == FWD ) { // carspeedX = this . drive * Math . cos ( this ._steerAngle ) * ( this ._acceleration ) ; carspeedY = this . drive * Math . sin ( this ._steerAngle ) * ( this ._acceleration ) ; } if ( this ._privod == AWD ) { carspeedX = this . drive * Math . cos ( this ._steerAngle ) * ( this ._acceleration ) ; carspeedY = this . drive * Math . sin ( this ._steerAngle ) * ( this ._acceleration ) ; carRearX = this . drive * Math . cos ( this ._rearAxisBodyRight. angle ) * ( this ._acceleration ) ; carRearY = this . drive * Math . sin ( this ._rearAxisBodyRight. angle ) * ( this ._acceleration ) ; } if ( this . drive ! = 0 ) { if ( this ._privod == FWD ) { // , ( ) this ._frontAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._frontAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; } if ( this ._privod == AWD ) // , ( ) { this ._frontAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._frontAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._rearAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carRearX, carRearY ) ) ; this ._rearAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carRearX, carRearY ) ) ; } } else { // spd = this . speed ; if ( spd > this ._friction ) { spd = spd - this ._friction / 1.3 ; } else { spd = 0 ; } if ( this ._privod == FWD ) // , ( ) { carspeedX = Math . cos ( this ._steerAngle ) * spd; carspeedY = Math . sin ( this ._steerAngle ) * spd; this ._frontAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._frontAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; } if ( this ._privod == AWD ) { // , ( ) carspeedX = Math . cos ( this ._steerAngle ) * spd; carspeedY = Math . sin ( this ._steerAngle ) * spd; this ._frontAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._frontAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; carspeedX = Math . cos ( this ._carBody. angle ) * spd; carspeedY = Math . sin ( this ._carBody. angle ) * spd; this ._rearAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._rearAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; } }
var carspeedX, carspeedY, carRearX,carRearY: Number ; if ( this ._privod == FWD ) { // carspeedX = this . drive * Math . cos ( this ._steerAngle ) * ( this ._acceleration ) ; carspeedY = this . drive * Math . sin ( this ._steerAngle ) * ( this ._acceleration ) ; } if ( this ._privod == AWD ) { carspeedX = this . drive * Math . cos ( this ._steerAngle ) * ( this ._acceleration ) ; carspeedY = this . drive * Math . sin ( this ._steerAngle ) * ( this ._acceleration ) ; carRearX = this . drive * Math . cos ( this ._rearAxisBodyRight. angle ) * ( this ._acceleration ) ; carRearY = this . drive * Math . sin ( this ._rearAxisBodyRight. angle ) * ( this ._acceleration ) ; } if ( this . drive ! = 0 ) { if ( this ._privod == FWD ) { // , ( ) this ._frontAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._frontAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; } if ( this ._privod == AWD ) // , ( ) { this ._frontAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._frontAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._rearAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carRearX, carRearY ) ) ; this ._rearAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carRearX, carRearY ) ) ; } } else { // spd = this . speed ; if ( spd > this ._friction ) { spd = spd - this ._friction / 1.3 ; } else { spd = 0 ; } if ( this ._privod == FWD ) // , ( ) { carspeedX = Math . cos ( this ._steerAngle ) * spd; carspeedY = Math . sin ( this ._steerAngle ) * spd; this ._frontAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._frontAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; } if ( this ._privod == AWD ) { // , ( ) carspeedX = Math . cos ( this ._steerAngle ) * spd; carspeedY = Math . sin ( this ._steerAngle ) * spd; this ._frontAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._frontAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; carspeedX = Math . cos ( this ._carBody. angle ) * spd; carspeedY = Math . sin ( this ._carBody. angle ) * spd; this ._rearAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._rearAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; } }
var carspeedX, carspeedY, carRearX,carRearY: Number ; if ( this ._privod == FWD ) { // carspeedX = this . drive * Math . cos ( this ._steerAngle ) * ( this ._acceleration ) ; carspeedY = this . drive * Math . sin ( this ._steerAngle ) * ( this ._acceleration ) ; } if ( this ._privod == AWD ) { carspeedX = this . drive * Math . cos ( this ._steerAngle ) * ( this ._acceleration ) ; carspeedY = this . drive * Math . sin ( this ._steerAngle ) * ( this ._acceleration ) ; carRearX = this . drive * Math . cos ( this ._rearAxisBodyRight. angle ) * ( this ._acceleration ) ; carRearY = this . drive * Math . sin ( this ._rearAxisBodyRight. angle ) * ( this ._acceleration ) ; } if ( this . drive ! = 0 ) { if ( this ._privod == FWD ) { // , ( ) this ._frontAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._frontAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; } if ( this ._privod == AWD ) // , ( ) { this ._frontAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._frontAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._rearAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carRearX, carRearY ) ) ; this ._rearAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carRearX, carRearY ) ) ; } } else { // spd = this . speed ; if ( spd > this ._friction ) { spd = spd - this ._friction / 1.3 ; } else { spd = 0 ; } if ( this ._privod == FWD ) // , ( ) { carspeedX = Math . cos ( this ._steerAngle ) * spd; carspeedY = Math . sin ( this ._steerAngle ) * spd; this ._frontAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._frontAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; } if ( this ._privod == AWD ) { // , ( ) carspeedX = Math . cos ( this ._steerAngle ) * spd; carspeedY = Math . sin ( this ._steerAngle ) * spd; this ._frontAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._frontAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; carspeedX = Math . cos ( this ._carBody. angle ) * spd; carspeedY = Math . sin ( this ._carBody. angle ) * spd; this ._rearAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._rearAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; } }
var carspeedX, carspeedY, carRearX,carRearY: Number ; if ( this ._privod == FWD ) { // carspeedX = this . drive * Math . cos ( this ._steerAngle ) * ( this ._acceleration ) ; carspeedY = this . drive * Math . sin ( this ._steerAngle ) * ( this ._acceleration ) ; } if ( this ._privod == AWD ) { carspeedX = this . drive * Math . cos ( this ._steerAngle ) * ( this ._acceleration ) ; carspeedY = this . drive * Math . sin ( this ._steerAngle ) * ( this ._acceleration ) ; carRearX = this . drive * Math . cos ( this ._rearAxisBodyRight. angle ) * ( this ._acceleration ) ; carRearY = this . drive * Math . sin ( this ._rearAxisBodyRight. angle ) * ( this ._acceleration ) ; } if ( this . drive ! = 0 ) { if ( this ._privod == FWD ) { // , ( ) this ._frontAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._frontAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; } if ( this ._privod == AWD ) // , ( ) { this ._frontAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._frontAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._rearAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carRearX, carRearY ) ) ; this ._rearAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carRearX, carRearY ) ) ; } } else { // spd = this . speed ; if ( spd > this ._friction ) { spd = spd - this ._friction / 1.3 ; } else { spd = 0 ; } if ( this ._privod == FWD ) // , ( ) { carspeedX = Math . cos ( this ._steerAngle ) * spd; carspeedY = Math . sin ( this ._steerAngle ) * spd; this ._frontAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._frontAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; } if ( this ._privod == AWD ) { // , ( ) carspeedX = Math . cos ( this ._steerAngle ) * spd; carspeedY = Math . sin ( this ._steerAngle ) * spd; this ._frontAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._frontAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; carspeedX = Math . cos ( this ._carBody. angle ) * spd; carspeedY = Math . sin ( this ._carBody. angle ) * spd; this ._rearAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._rearAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; } }
var carspeedX, carspeedY, carRearX,carRearY: Number ; if ( this ._privod == FWD ) { // carspeedX = this . drive * Math . cos ( this ._steerAngle ) * ( this ._acceleration ) ; carspeedY = this . drive * Math . sin ( this ._steerAngle ) * ( this ._acceleration ) ; } if ( this ._privod == AWD ) { carspeedX = this . drive * Math . cos ( this ._steerAngle ) * ( this ._acceleration ) ; carspeedY = this . drive * Math . sin ( this ._steerAngle ) * ( this ._acceleration ) ; carRearX = this . drive * Math . cos ( this ._rearAxisBodyRight. angle ) * ( this ._acceleration ) ; carRearY = this . drive * Math . sin ( this ._rearAxisBodyRight. angle ) * ( this ._acceleration ) ; } if ( this . drive ! = 0 ) { if ( this ._privod == FWD ) { // , ( ) this ._frontAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._frontAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; } if ( this ._privod == AWD ) // , ( ) { this ._frontAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._frontAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._rearAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carRearX, carRearY ) ) ; this ._rearAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carRearX, carRearY ) ) ; } } else { // spd = this . speed ; if ( spd > this ._friction ) { spd = spd - this ._friction / 1.3 ; } else { spd = 0 ; } if ( this ._privod == FWD ) // , ( ) { carspeedX = Math . cos ( this ._steerAngle ) * spd; carspeedY = Math . sin ( this ._steerAngle ) * spd; this ._frontAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._frontAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; } if ( this ._privod == AWD ) { // , ( ) carspeedX = Math . cos ( this ._steerAngle ) * spd; carspeedY = Math . sin ( this ._steerAngle ) * spd; this ._frontAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._frontAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; carspeedX = Math . cos ( this ._carBody. angle ) * spd; carspeedY = Math . sin ( this ._carBody. angle ) * spd; this ._rearAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._rearAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; } }
var carspeedX, carspeedY, carRearX,carRearY: Number ; if ( this ._privod == FWD ) { // carspeedX = this . drive * Math . cos ( this ._steerAngle ) * ( this ._acceleration ) ; carspeedY = this . drive * Math . sin ( this ._steerAngle ) * ( this ._acceleration ) ; } if ( this ._privod == AWD ) { carspeedX = this . drive * Math . cos ( this ._steerAngle ) * ( this ._acceleration ) ; carspeedY = this . drive * Math . sin ( this ._steerAngle ) * ( this ._acceleration ) ; carRearX = this . drive * Math . cos ( this ._rearAxisBodyRight. angle ) * ( this ._acceleration ) ; carRearY = this . drive * Math . sin ( this ._rearAxisBodyRight. angle ) * ( this ._acceleration ) ; } if ( this . drive ! = 0 ) { if ( this ._privod == FWD ) { // , ( ) this ._frontAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._frontAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; } if ( this ._privod == AWD ) // , ( ) { this ._frontAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._frontAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._rearAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carRearX, carRearY ) ) ; this ._rearAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carRearX, carRearY ) ) ; } } else { // spd = this . speed ; if ( spd > this ._friction ) { spd = spd - this ._friction / 1.3 ; } else { spd = 0 ; } if ( this ._privod == FWD ) // , ( ) { carspeedX = Math . cos ( this ._steerAngle ) * spd; carspeedY = Math . sin ( this ._steerAngle ) * spd; this ._frontAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._frontAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; } if ( this ._privod == AWD ) { // , ( ) carspeedX = Math . cos ( this ._steerAngle ) * spd; carspeedY = Math . sin ( this ._steerAngle ) * spd; this ._frontAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._frontAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; carspeedX = Math . cos ( this ._carBody. angle ) * spd; carspeedY = Math . sin ( this ._carBody. angle ) * spd; this ._rearAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._rearAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; } }
var carspeedX, carspeedY, carRearX,carRearY: Number ; if ( this ._privod == FWD ) { // carspeedX = this . drive * Math . cos ( this ._steerAngle ) * ( this ._acceleration ) ; carspeedY = this . drive * Math . sin ( this ._steerAngle ) * ( this ._acceleration ) ; } if ( this ._privod == AWD ) { carspeedX = this . drive * Math . cos ( this ._steerAngle ) * ( this ._acceleration ) ; carspeedY = this . drive * Math . sin ( this ._steerAngle ) * ( this ._acceleration ) ; carRearX = this . drive * Math . cos ( this ._rearAxisBodyRight. angle ) * ( this ._acceleration ) ; carRearY = this . drive * Math . sin ( this ._rearAxisBodyRight. angle ) * ( this ._acceleration ) ; } if ( this . drive ! = 0 ) { if ( this ._privod == FWD ) { // , ( ) this ._frontAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._frontAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; } if ( this ._privod == AWD ) // , ( ) { this ._frontAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._frontAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._rearAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carRearX, carRearY ) ) ; this ._rearAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carRearX, carRearY ) ) ; } } else { // spd = this . speed ; if ( spd > this ._friction ) { spd = spd - this ._friction / 1.3 ; } else { spd = 0 ; } if ( this ._privod == FWD ) // , ( ) { carspeedX = Math . cos ( this ._steerAngle ) * spd; carspeedY = Math . sin ( this ._steerAngle ) * spd; this ._frontAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._frontAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; } if ( this ._privod == AWD ) { // , ( ) carspeedX = Math . cos ( this ._steerAngle ) * spd; carspeedY = Math . sin ( this ._steerAngle ) * spd; this ._frontAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._frontAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; carspeedX = Math . cos ( this ._carBody. angle ) * spd; carspeedY = Math . sin ( this ._carBody. angle ) * spd; this ._rearAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._rearAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; } }
var carspeedX, carspeedY, carRearX,carRearY: Number ; if ( this ._privod == FWD ) { // carspeedX = this . drive * Math . cos ( this ._steerAngle ) * ( this ._acceleration ) ; carspeedY = this . drive * Math . sin ( this ._steerAngle ) * ( this ._acceleration ) ; } if ( this ._privod == AWD ) { carspeedX = this . drive * Math . cos ( this ._steerAngle ) * ( this ._acceleration ) ; carspeedY = this . drive * Math . sin ( this ._steerAngle ) * ( this ._acceleration ) ; carRearX = this . drive * Math . cos ( this ._rearAxisBodyRight. angle ) * ( this ._acceleration ) ; carRearY = this . drive * Math . sin ( this ._rearAxisBodyRight. angle ) * ( this ._acceleration ) ; } if ( this . drive ! = 0 ) { if ( this ._privod == FWD ) { // , ( ) this ._frontAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._frontAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; } if ( this ._privod == AWD ) // , ( ) { this ._frontAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._frontAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._rearAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carRearX, carRearY ) ) ; this ._rearAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carRearX, carRearY ) ) ; } } else { // spd = this . speed ; if ( spd > this ._friction ) { spd = spd - this ._friction / 1.3 ; } else { spd = 0 ; } if ( this ._privod == FWD ) // , ( ) { carspeedX = Math . cos ( this ._steerAngle ) * spd; carspeedY = Math . sin ( this ._steerAngle ) * spd; this ._frontAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._frontAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; } if ( this ._privod == AWD ) { // , ( ) carspeedX = Math . cos ( this ._steerAngle ) * spd; carspeedY = Math . sin ( this ._steerAngle ) * spd; this ._frontAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._frontAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; carspeedX = Math . cos ( this ._carBody. angle ) * spd; carspeedY = Math . sin ( this ._carBody. angle ) * spd; this ._rearAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._rearAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; } }
var carspeedX, carspeedY, carRearX,carRearY: Number ; if ( this ._privod == FWD ) { // carspeedX = this . drive * Math . cos ( this ._steerAngle ) * ( this ._acceleration ) ; carspeedY = this . drive * Math . sin ( this ._steerAngle ) * ( this ._acceleration ) ; } if ( this ._privod == AWD ) { carspeedX = this . drive * Math . cos ( this ._steerAngle ) * ( this ._acceleration ) ; carspeedY = this . drive * Math . sin ( this ._steerAngle ) * ( this ._acceleration ) ; carRearX = this . drive * Math . cos ( this ._rearAxisBodyRight. angle ) * ( this ._acceleration ) ; carRearY = this . drive * Math . sin ( this ._rearAxisBodyRight. angle ) * ( this ._acceleration ) ; } if ( this . drive ! = 0 ) { if ( this ._privod == FWD ) { // , ( ) this ._frontAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._frontAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; } if ( this ._privod == AWD ) // , ( ) { this ._frontAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._frontAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._rearAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carRearX, carRearY ) ) ; this ._rearAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carRearX, carRearY ) ) ; } } else { // spd = this . speed ; if ( spd > this ._friction ) { spd = spd - this ._friction / 1.3 ; } else { spd = 0 ; } if ( this ._privod == FWD ) // , ( ) { carspeedX = Math . cos ( this ._steerAngle ) * spd; carspeedY = Math . sin ( this ._steerAngle ) * spd; this ._frontAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._frontAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; } if ( this ._privod == AWD ) { // , ( ) carspeedX = Math . cos ( this ._steerAngle ) * spd; carspeedY = Math . sin ( this ._steerAngle ) * spd; this ._frontAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._frontAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; carspeedX = Math . cos ( this ._carBody. angle ) * spd; carspeedY = Math . sin ( this ._carBody. angle ) * spd; this ._rearAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._rearAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; } }
var carspeedX, carspeedY, carRearX,carRearY: Number ; if ( this ._privod == FWD ) { // carspeedX = this . drive * Math . cos ( this ._steerAngle ) * ( this ._acceleration ) ; carspeedY = this . drive * Math . sin ( this ._steerAngle ) * ( this ._acceleration ) ; } if ( this ._privod == AWD ) { carspeedX = this . drive * Math . cos ( this ._steerAngle ) * ( this ._acceleration ) ; carspeedY = this . drive * Math . sin ( this ._steerAngle ) * ( this ._acceleration ) ; carRearX = this . drive * Math . cos ( this ._rearAxisBodyRight. angle ) * ( this ._acceleration ) ; carRearY = this . drive * Math . sin ( this ._rearAxisBodyRight. angle ) * ( this ._acceleration ) ; } if ( this . drive ! = 0 ) { if ( this ._privod == FWD ) { // , ( ) this ._frontAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._frontAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; } if ( this ._privod == AWD ) // , ( ) { this ._frontAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._frontAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._rearAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carRearX, carRearY ) ) ; this ._rearAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carRearX, carRearY ) ) ; } } else { // spd = this . speed ; if ( spd > this ._friction ) { spd = spd - this ._friction / 1.3 ; } else { spd = 0 ; } if ( this ._privod == FWD ) // , ( ) { carspeedX = Math . cos ( this ._steerAngle ) * spd; carspeedY = Math . sin ( this ._steerAngle ) * spd; this ._frontAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._frontAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; } if ( this ._privod == AWD ) { // , ( ) carspeedX = Math . cos ( this ._steerAngle ) * spd; carspeedY = Math . sin ( this ._steerAngle ) * spd; this ._frontAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._frontAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; carspeedX = Math . cos ( this ._carBody. angle ) * spd; carspeedY = Math . sin ( this ._carBody. angle ) * spd; this ._rearAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._rearAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; } }
var carspeedX, carspeedY, carRearX,carRearY: Number ; if ( this ._privod == FWD ) { // carspeedX = this . drive * Math . cos ( this ._steerAngle ) * ( this ._acceleration ) ; carspeedY = this . drive * Math . sin ( this ._steerAngle ) * ( this ._acceleration ) ; } if ( this ._privod == AWD ) { carspeedX = this . drive * Math . cos ( this ._steerAngle ) * ( this ._acceleration ) ; carspeedY = this . drive * Math . sin ( this ._steerAngle ) * ( this ._acceleration ) ; carRearX = this . drive * Math . cos ( this ._rearAxisBodyRight. angle ) * ( this ._acceleration ) ; carRearY = this . drive * Math . sin ( this ._rearAxisBodyRight. angle ) * ( this ._acceleration ) ; } if ( this . drive ! = 0 ) { if ( this ._privod == FWD ) { // , ( ) this ._frontAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._frontAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; } if ( this ._privod == AWD ) // , ( ) { this ._frontAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._frontAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._rearAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carRearX, carRearY ) ) ; this ._rearAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carRearX, carRearY ) ) ; } } else { // spd = this . speed ; if ( spd > this ._friction ) { spd = spd - this ._friction / 1.3 ; } else { spd = 0 ; } if ( this ._privod == FWD ) // , ( ) { carspeedX = Math . cos ( this ._steerAngle ) * spd; carspeedY = Math . sin ( this ._steerAngle ) * spd; this ._frontAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._frontAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; } if ( this ._privod == AWD ) { // , ( ) carspeedX = Math . cos ( this ._steerAngle ) * spd; carspeedY = Math . sin ( this ._steerAngle ) * spd; this ._frontAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._frontAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; carspeedX = Math . cos ( this ._carBody. angle ) * spd; carspeedY = Math . sin ( this ._carBody. angle ) * spd; this ._rearAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._rearAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; } }
var carspeedX, carspeedY, carRearX,carRearY: Number ; if ( this ._privod == FWD ) { // carspeedX = this . drive * Math . cos ( this ._steerAngle ) * ( this ._acceleration ) ; carspeedY = this . drive * Math . sin ( this ._steerAngle ) * ( this ._acceleration ) ; } if ( this ._privod == AWD ) { carspeedX = this . drive * Math . cos ( this ._steerAngle ) * ( this ._acceleration ) ; carspeedY = this . drive * Math . sin ( this ._steerAngle ) * ( this ._acceleration ) ; carRearX = this . drive * Math . cos ( this ._rearAxisBodyRight. angle ) * ( this ._acceleration ) ; carRearY = this . drive * Math . sin ( this ._rearAxisBodyRight. angle ) * ( this ._acceleration ) ; } if ( this . drive ! = 0 ) { if ( this ._privod == FWD ) { // , ( ) this ._frontAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._frontAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; } if ( this ._privod == AWD ) // , ( ) { this ._frontAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._frontAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._rearAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carRearX, carRearY ) ) ; this ._rearAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carRearX, carRearY ) ) ; } } else { // spd = this . speed ; if ( spd > this ._friction ) { spd = spd - this ._friction / 1.3 ; } else { spd = 0 ; } if ( this ._privod == FWD ) // , ( ) { carspeedX = Math . cos ( this ._steerAngle ) * spd; carspeedY = Math . sin ( this ._steerAngle ) * spd; this ._frontAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._frontAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; } if ( this ._privod == AWD ) { // , ( ) carspeedX = Math . cos ( this ._steerAngle ) * spd; carspeedY = Math . sin ( this ._steerAngle ) * spd; this ._frontAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._frontAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; carspeedX = Math . cos ( this ._carBody. angle ) * spd; carspeedY = Math . sin ( this ._carBody. angle ) * spd; this ._rearAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._rearAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; } }
var carspeedX, carspeedY, carRearX,carRearY: Number ; if ( this ._privod == FWD ) { // carspeedX = this . drive * Math . cos ( this ._steerAngle ) * ( this ._acceleration ) ; carspeedY = this . drive * Math . sin ( this ._steerAngle ) * ( this ._acceleration ) ; } if ( this ._privod == AWD ) { carspeedX = this . drive * Math . cos ( this ._steerAngle ) * ( this ._acceleration ) ; carspeedY = this . drive * Math . sin ( this ._steerAngle ) * ( this ._acceleration ) ; carRearX = this . drive * Math . cos ( this ._rearAxisBodyRight. angle ) * ( this ._acceleration ) ; carRearY = this . drive * Math . sin ( this ._rearAxisBodyRight. angle ) * ( this ._acceleration ) ; } if ( this . drive ! = 0 ) { if ( this ._privod == FWD ) { // , ( ) this ._frontAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._frontAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; } if ( this ._privod == AWD ) // , ( ) { this ._frontAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._frontAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._rearAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carRearX, carRearY ) ) ; this ._rearAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carRearX, carRearY ) ) ; } } else { // spd = this . speed ; if ( spd > this ._friction ) { spd = spd - this ._friction / 1.3 ; } else { spd = 0 ; } if ( this ._privod == FWD ) // , ( ) { carspeedX = Math . cos ( this ._steerAngle ) * spd; carspeedY = Math . sin ( this ._steerAngle ) * spd; this ._frontAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._frontAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; } if ( this ._privod == AWD ) { // , ( ) carspeedX = Math . cos ( this ._steerAngle ) * spd; carspeedY = Math . sin ( this ._steerAngle ) * spd; this ._frontAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._frontAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; carspeedX = Math . cos ( this ._carBody. angle ) * spd; carspeedY = Math . sin ( this ._carBody. angle ) * spd; this ._rearAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._rearAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; } }
var carspeedX, carspeedY, carRearX,carRearY: Number ; if ( this ._privod == FWD ) { // carspeedX = this . drive * Math . cos ( this ._steerAngle ) * ( this ._acceleration ) ; carspeedY = this . drive * Math . sin ( this ._steerAngle ) * ( this ._acceleration ) ; } if ( this ._privod == AWD ) { carspeedX = this . drive * Math . cos ( this ._steerAngle ) * ( this ._acceleration ) ; carspeedY = this . drive * Math . sin ( this ._steerAngle ) * ( this ._acceleration ) ; carRearX = this . drive * Math . cos ( this ._rearAxisBodyRight. angle ) * ( this ._acceleration ) ; carRearY = this . drive * Math . sin ( this ._rearAxisBodyRight. angle ) * ( this ._acceleration ) ; } if ( this . drive ! = 0 ) { if ( this ._privod == FWD ) { // , ( ) this ._frontAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._frontAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; } if ( this ._privod == AWD ) // , ( ) { this ._frontAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._frontAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._rearAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carRearX, carRearY ) ) ; this ._rearAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carRearX, carRearY ) ) ; } } else { // spd = this . speed ; if ( spd > this ._friction ) { spd = spd - this ._friction / 1.3 ; } else { spd = 0 ; } if ( this ._privod == FWD ) // , ( ) { carspeedX = Math . cos ( this ._steerAngle ) * spd; carspeedY = Math . sin ( this ._steerAngle ) * spd; this ._frontAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._frontAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; } if ( this ._privod == AWD ) { // , ( ) carspeedX = Math . cos ( this ._steerAngle ) * spd; carspeedY = Math . sin ( this ._steerAngle ) * spd; this ._frontAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._frontAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; carspeedX = Math . cos ( this ._carBody. angle ) * spd; carspeedY = Math . sin ( this ._carBody. angle ) * spd; this ._rearAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._rearAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; } }
var carspeedX, carspeedY, carRearX,carRearY: Number ; if ( this ._privod == FWD ) { // carspeedX = this . drive * Math . cos ( this ._steerAngle ) * ( this ._acceleration ) ; carspeedY = this . drive * Math . sin ( this ._steerAngle ) * ( this ._acceleration ) ; } if ( this ._privod == AWD ) { carspeedX = this . drive * Math . cos ( this ._steerAngle ) * ( this ._acceleration ) ; carspeedY = this . drive * Math . sin ( this ._steerAngle ) * ( this ._acceleration ) ; carRearX = this . drive * Math . cos ( this ._rearAxisBodyRight. angle ) * ( this ._acceleration ) ; carRearY = this . drive * Math . sin ( this ._rearAxisBodyRight. angle ) * ( this ._acceleration ) ; } if ( this . drive ! = 0 ) { if ( this ._privod == FWD ) { // , ( ) this ._frontAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._frontAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; } if ( this ._privod == AWD ) // , ( ) { this ._frontAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._frontAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._rearAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carRearX, carRearY ) ) ; this ._rearAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carRearX, carRearY ) ) ; } } else { // spd = this . speed ; if ( spd > this ._friction ) { spd = spd - this ._friction / 1.3 ; } else { spd = 0 ; } if ( this ._privod == FWD ) // , ( ) { carspeedX = Math . cos ( this ._steerAngle ) * spd; carspeedY = Math . sin ( this ._steerAngle ) * spd; this ._frontAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._frontAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; } if ( this ._privod == AWD ) { // , ( ) carspeedX = Math . cos ( this ._steerAngle ) * spd; carspeedY = Math . sin ( this ._steerAngle ) * spd; this ._frontAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._frontAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; carspeedX = Math . cos ( this ._carBody. angle ) * spd; carspeedY = Math . sin ( this ._carBody. angle ) * spd; this ._rearAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._rearAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; } }
var carspeedX, carspeedY, carRearX,carRearY: Number ; if ( this ._privod == FWD ) { // carspeedX = this . drive * Math . cos ( this ._steerAngle ) * ( this ._acceleration ) ; carspeedY = this . drive * Math . sin ( this ._steerAngle ) * ( this ._acceleration ) ; } if ( this ._privod == AWD ) { carspeedX = this . drive * Math . cos ( this ._steerAngle ) * ( this ._acceleration ) ; carspeedY = this . drive * Math . sin ( this ._steerAngle ) * ( this ._acceleration ) ; carRearX = this . drive * Math . cos ( this ._rearAxisBodyRight. angle ) * ( this ._acceleration ) ; carRearY = this . drive * Math . sin ( this ._rearAxisBodyRight. angle ) * ( this ._acceleration ) ; } if ( this . drive ! = 0 ) { if ( this ._privod == FWD ) { // , ( ) this ._frontAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._frontAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; } if ( this ._privod == AWD ) // , ( ) { this ._frontAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._frontAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._rearAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carRearX, carRearY ) ) ; this ._rearAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carRearX, carRearY ) ) ; } } else { // spd = this . speed ; if ( spd > this ._friction ) { spd = spd - this ._friction / 1.3 ; } else { spd = 0 ; } if ( this ._privod == FWD ) // , ( ) { carspeedX = Math . cos ( this ._steerAngle ) * spd; carspeedY = Math . sin ( this ._steerAngle ) * spd; this ._frontAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._frontAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; } if ( this ._privod == AWD ) { // , ( ) carspeedX = Math . cos ( this ._steerAngle ) * spd; carspeedY = Math . sin ( this ._steerAngle ) * spd; this ._frontAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._frontAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; carspeedX = Math . cos ( this ._carBody. angle ) * spd; carspeedY = Math . sin ( this ._carBody. angle ) * spd; this ._rearAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._rearAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; } }
var carspeedX, carspeedY, carRearX,carRearY: Number ; if ( this ._privod == FWD ) { // carspeedX = this . drive * Math . cos ( this ._steerAngle ) * ( this ._acceleration ) ; carspeedY = this . drive * Math . sin ( this ._steerAngle ) * ( this ._acceleration ) ; } if ( this ._privod == AWD ) { carspeedX = this . drive * Math . cos ( this ._steerAngle ) * ( this ._acceleration ) ; carspeedY = this . drive * Math . sin ( this ._steerAngle ) * ( this ._acceleration ) ; carRearX = this . drive * Math . cos ( this ._rearAxisBodyRight. angle ) * ( this ._acceleration ) ; carRearY = this . drive * Math . sin ( this ._rearAxisBodyRight. angle ) * ( this ._acceleration ) ; } if ( this . drive ! = 0 ) { if ( this ._privod == FWD ) { // , ( ) this ._frontAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._frontAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; } if ( this ._privod == AWD ) // , ( ) { this ._frontAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._frontAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._rearAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carRearX, carRearY ) ) ; this ._rearAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carRearX, carRearY ) ) ; } } else { // spd = this . speed ; if ( spd > this ._friction ) { spd = spd - this ._friction / 1.3 ; } else { spd = 0 ; } if ( this ._privod == FWD ) // , ( ) { carspeedX = Math . cos ( this ._steerAngle ) * spd; carspeedY = Math . sin ( this ._steerAngle ) * spd; this ._frontAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._frontAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; } if ( this ._privod == AWD ) { // , ( ) carspeedX = Math . cos ( this ._steerAngle ) * spd; carspeedY = Math . sin ( this ._steerAngle ) * spd; this ._frontAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._frontAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; carspeedX = Math . cos ( this ._carBody. angle ) * spd; carspeedY = Math . sin ( this ._carBody. angle ) * spd; this ._rearAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._rearAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; } }
var carspeedX, carspeedY, carRearX,carRearY: Number ; if ( this ._privod == FWD ) { // carspeedX = this . drive * Math . cos ( this ._steerAngle ) * ( this ._acceleration ) ; carspeedY = this . drive * Math . sin ( this ._steerAngle ) * ( this ._acceleration ) ; } if ( this ._privod == AWD ) { carspeedX = this . drive * Math . cos ( this ._steerAngle ) * ( this ._acceleration ) ; carspeedY = this . drive * Math . sin ( this ._steerAngle ) * ( this ._acceleration ) ; carRearX = this . drive * Math . cos ( this ._rearAxisBodyRight. angle ) * ( this ._acceleration ) ; carRearY = this . drive * Math . sin ( this ._rearAxisBodyRight. angle ) * ( this ._acceleration ) ; } if ( this . drive ! = 0 ) { if ( this ._privod == FWD ) { // , ( ) this ._frontAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._frontAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; } if ( this ._privod == AWD ) // , ( ) { this ._frontAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._frontAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._rearAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carRearX, carRearY ) ) ; this ._rearAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carRearX, carRearY ) ) ; } } else { // spd = this . speed ; if ( spd > this ._friction ) { spd = spd - this ._friction / 1.3 ; } else { spd = 0 ; } if ( this ._privod == FWD ) // , ( ) { carspeedX = Math . cos ( this ._steerAngle ) * spd; carspeedY = Math . sin ( this ._steerAngle ) * spd; this ._frontAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._frontAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; } if ( this ._privod == AWD ) { // , ( ) carspeedX = Math . cos ( this ._steerAngle ) * spd; carspeedY = Math . sin ( this ._steerAngle ) * spd; this ._frontAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._frontAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; carspeedX = Math . cos ( this ._carBody. angle ) * spd; carspeedY = Math . sin ( this ._carBody. angle ) * spd; this ._rearAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._rearAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; } }
var carspeedX, carspeedY, carRearX,carRearY: Number ; if ( this ._privod == FWD ) { // carspeedX = this . drive * Math . cos ( this ._steerAngle ) * ( this ._acceleration ) ; carspeedY = this . drive * Math . sin ( this ._steerAngle ) * ( this ._acceleration ) ; } if ( this ._privod == AWD ) { carspeedX = this . drive * Math . cos ( this ._steerAngle ) * ( this ._acceleration ) ; carspeedY = this . drive * Math . sin ( this ._steerAngle ) * ( this ._acceleration ) ; carRearX = this . drive * Math . cos ( this ._rearAxisBodyRight. angle ) * ( this ._acceleration ) ; carRearY = this . drive * Math . sin ( this ._rearAxisBodyRight. angle ) * ( this ._acceleration ) ; } if ( this . drive ! = 0 ) { if ( this ._privod == FWD ) { // , ( ) this ._frontAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._frontAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; } if ( this ._privod == AWD ) // , ( ) { this ._frontAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._frontAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._rearAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carRearX, carRearY ) ) ; this ._rearAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carRearX, carRearY ) ) ; } } else { // spd = this . speed ; if ( spd > this ._friction ) { spd = spd - this ._friction / 1.3 ; } else { spd = 0 ; } if ( this ._privod == FWD ) // , ( ) { carspeedX = Math . cos ( this ._steerAngle ) * spd; carspeedY = Math . sin ( this ._steerAngle ) * spd; this ._frontAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._frontAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; } if ( this ._privod == AWD ) { // , ( ) carspeedX = Math . cos ( this ._steerAngle ) * spd; carspeedY = Math . sin ( this ._steerAngle ) * spd; this ._frontAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._frontAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; carspeedX = Math . cos ( this ._carBody. angle ) * spd; carspeedY = Math . sin ( this ._carBody. angle ) * spd; this ._rearAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._rearAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; } }
var carspeedX, carspeedY, carRearX,carRearY: Number ; if ( this ._privod == FWD ) { // carspeedX = this . drive * Math . cos ( this ._steerAngle ) * ( this ._acceleration ) ; carspeedY = this . drive * Math . sin ( this ._steerAngle ) * ( this ._acceleration ) ; } if ( this ._privod == AWD ) { carspeedX = this . drive * Math . cos ( this ._steerAngle ) * ( this ._acceleration ) ; carspeedY = this . drive * Math . sin ( this ._steerAngle ) * ( this ._acceleration ) ; carRearX = this . drive * Math . cos ( this ._rearAxisBodyRight. angle ) * ( this ._acceleration ) ; carRearY = this . drive * Math . sin ( this ._rearAxisBodyRight. angle ) * ( this ._acceleration ) ; } if ( this . drive ! = 0 ) { if ( this ._privod == FWD ) { // , ( ) this ._frontAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._frontAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; } if ( this ._privod == AWD ) // , ( ) { this ._frontAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._frontAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._rearAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carRearX, carRearY ) ) ; this ._rearAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carRearX, carRearY ) ) ; } } else { // spd = this . speed ; if ( spd > this ._friction ) { spd = spd - this ._friction / 1.3 ; } else { spd = 0 ; } if ( this ._privod == FWD ) // , ( ) { carspeedX = Math . cos ( this ._steerAngle ) * spd; carspeedY = Math . sin ( this ._steerAngle ) * spd; this ._frontAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._frontAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; } if ( this ._privod == AWD ) { // , ( ) carspeedX = Math . cos ( this ._steerAngle ) * spd; carspeedY = Math . sin ( this ._steerAngle ) * spd; this ._frontAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._frontAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; carspeedX = Math . cos ( this ._carBody. angle ) * spd; carspeedY = Math . sin ( this ._carBody. angle ) * spd; this ._rearAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._rearAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; } }
var carspeedX, carspeedY, carRearX,carRearY: Number ; if ( this ._privod == FWD ) { // carspeedX = this . drive * Math . cos ( this ._steerAngle ) * ( this ._acceleration ) ; carspeedY = this . drive * Math . sin ( this ._steerAngle ) * ( this ._acceleration ) ; } if ( this ._privod == AWD ) { carspeedX = this . drive * Math . cos ( this ._steerAngle ) * ( this ._acceleration ) ; carspeedY = this . drive * Math . sin ( this ._steerAngle ) * ( this ._acceleration ) ; carRearX = this . drive * Math . cos ( this ._rearAxisBodyRight. angle ) * ( this ._acceleration ) ; carRearY = this . drive * Math . sin ( this ._rearAxisBodyRight. angle ) * ( this ._acceleration ) ; } if ( this . drive ! = 0 ) { if ( this ._privod == FWD ) { // , ( ) this ._frontAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._frontAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; } if ( this ._privod == AWD ) // , ( ) { this ._frontAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._frontAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._rearAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carRearX, carRearY ) ) ; this ._rearAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carRearX, carRearY ) ) ; } } else { // spd = this . speed ; if ( spd > this ._friction ) { spd = spd - this ._friction / 1.3 ; } else { spd = 0 ; } if ( this ._privod == FWD ) // , ( ) { carspeedX = Math . cos ( this ._steerAngle ) * spd; carspeedY = Math . sin ( this ._steerAngle ) * spd; this ._frontAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._frontAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; } if ( this ._privod == AWD ) { // , ( ) carspeedX = Math . cos ( this ._steerAngle ) * spd; carspeedY = Math . sin ( this ._steerAngle ) * spd; this ._frontAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._frontAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; carspeedX = Math . cos ( this ._carBody. angle ) * spd; carspeedY = Math . sin ( this ._carBody. angle ) * spd; this ._rearAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._rearAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; } }
var carspeedX, carspeedY, carRearX,carRearY: Number ; if ( this ._privod == FWD ) { // carspeedX = this . drive * Math . cos ( this ._steerAngle ) * ( this ._acceleration ) ; carspeedY = this . drive * Math . sin ( this ._steerAngle ) * ( this ._acceleration ) ; } if ( this ._privod == AWD ) { carspeedX = this . drive * Math . cos ( this ._steerAngle ) * ( this ._acceleration ) ; carspeedY = this . drive * Math . sin ( this ._steerAngle ) * ( this ._acceleration ) ; carRearX = this . drive * Math . cos ( this ._rearAxisBodyRight. angle ) * ( this ._acceleration ) ; carRearY = this . drive * Math . sin ( this ._rearAxisBodyRight. angle ) * ( this ._acceleration ) ; } if ( this . drive ! = 0 ) { if ( this ._privod == FWD ) { // , ( ) this ._frontAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._frontAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; } if ( this ._privod == AWD ) // , ( ) { this ._frontAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._frontAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._rearAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carRearX, carRearY ) ) ; this ._rearAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carRearX, carRearY ) ) ; } } else { // spd = this . speed ; if ( spd > this ._friction ) { spd = spd - this ._friction / 1.3 ; } else { spd = 0 ; } if ( this ._privod == FWD ) // , ( ) { carspeedX = Math . cos ( this ._steerAngle ) * spd; carspeedY = Math . sin ( this ._steerAngle ) * spd; this ._frontAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._frontAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; } if ( this ._privod == AWD ) { // , ( ) carspeedX = Math . cos ( this ._steerAngle ) * spd; carspeedY = Math . sin ( this ._steerAngle ) * spd; this ._frontAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._frontAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; carspeedX = Math . cos ( this ._carBody. angle ) * spd; carspeedY = Math . sin ( this ._carBody. angle ) * spd; this ._rearAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._rearAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; } }
var carspeedX, carspeedY, carRearX,carRearY: Number ; if ( this ._privod == FWD ) { // carspeedX = this . drive * Math . cos ( this ._steerAngle ) * ( this ._acceleration ) ; carspeedY = this . drive * Math . sin ( this ._steerAngle ) * ( this ._acceleration ) ; } if ( this ._privod == AWD ) { carspeedX = this . drive * Math . cos ( this ._steerAngle ) * ( this ._acceleration ) ; carspeedY = this . drive * Math . sin ( this ._steerAngle ) * ( this ._acceleration ) ; carRearX = this . drive * Math . cos ( this ._rearAxisBodyRight. angle ) * ( this ._acceleration ) ; carRearY = this . drive * Math . sin ( this ._rearAxisBodyRight. angle ) * ( this ._acceleration ) ; } if ( this . drive ! = 0 ) { if ( this ._privod == FWD ) { // , ( ) this ._frontAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._frontAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; } if ( this ._privod == AWD ) // , ( ) { this ._frontAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._frontAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._rearAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carRearX, carRearY ) ) ; this ._rearAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carRearX, carRearY ) ) ; } } else { // spd = this . speed ; if ( spd > this ._friction ) { spd = spd - this ._friction / 1.3 ; } else { spd = 0 ; } if ( this ._privod == FWD ) // , ( ) { carspeedX = Math . cos ( this ._steerAngle ) * spd; carspeedY = Math . sin ( this ._steerAngle ) * spd; this ._frontAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._frontAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; } if ( this ._privod == AWD ) { // , ( ) carspeedX = Math . cos ( this ._steerAngle ) * spd; carspeedY = Math . sin ( this ._steerAngle ) * spd; this ._frontAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._frontAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; carspeedX = Math . cos ( this ._carBody. angle ) * spd; carspeedY = Math . sin ( this ._carBody. angle ) * spd; this ._rearAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._rearAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; } }
var carspeedX, carspeedY, carRearX,carRearY: Number ; if ( this ._privod == FWD ) { // carspeedX = this . drive * Math . cos ( this ._steerAngle ) * ( this ._acceleration ) ; carspeedY = this . drive * Math . sin ( this ._steerAngle ) * ( this ._acceleration ) ; } if ( this ._privod == AWD ) { carspeedX = this . drive * Math . cos ( this ._steerAngle ) * ( this ._acceleration ) ; carspeedY = this . drive * Math . sin ( this ._steerAngle ) * ( this ._acceleration ) ; carRearX = this . drive * Math . cos ( this ._rearAxisBodyRight. angle ) * ( this ._acceleration ) ; carRearY = this . drive * Math . sin ( this ._rearAxisBodyRight. angle ) * ( this ._acceleration ) ; } if ( this . drive ! = 0 ) { if ( this ._privod == FWD ) { // , ( ) this ._frontAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._frontAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; } if ( this ._privod == AWD ) // , ( ) { this ._frontAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._frontAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._rearAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carRearX, carRearY ) ) ; this ._rearAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carRearX, carRearY ) ) ; } } else { // spd = this . speed ; if ( spd > this ._friction ) { spd = spd - this ._friction / 1.3 ; } else { spd = 0 ; } if ( this ._privod == FWD ) // , ( ) { carspeedX = Math . cos ( this ._steerAngle ) * spd; carspeedY = Math . sin ( this ._steerAngle ) * spd; this ._frontAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._frontAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; } if ( this ._privod == AWD ) { // , ( ) carspeedX = Math . cos ( this ._steerAngle ) * spd; carspeedY = Math . sin ( this ._steerAngle ) * spd; this ._frontAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._frontAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; carspeedX = Math . cos ( this ._carBody. angle ) * spd; carspeedY = Math . sin ( this ._carBody. angle ) * spd; this ._rearAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._rearAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; } }
var carspeedX, carspeedY, carRearX,carRearY: Number ; if ( this ._privod == FWD ) { // carspeedX = this . drive * Math . cos ( this ._steerAngle ) * ( this ._acceleration ) ; carspeedY = this . drive * Math . sin ( this ._steerAngle ) * ( this ._acceleration ) ; } if ( this ._privod == AWD ) { carspeedX = this . drive * Math . cos ( this ._steerAngle ) * ( this ._acceleration ) ; carspeedY = this . drive * Math . sin ( this ._steerAngle ) * ( this ._acceleration ) ; carRearX = this . drive * Math . cos ( this ._rearAxisBodyRight. angle ) * ( this ._acceleration ) ; carRearY = this . drive * Math . sin ( this ._rearAxisBodyRight. angle ) * ( this ._acceleration ) ; } if ( this . drive ! = 0 ) { if ( this ._privod == FWD ) { // , ( ) this ._frontAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._frontAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; } if ( this ._privod == AWD ) // , ( ) { this ._frontAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._frontAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._rearAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carRearX, carRearY ) ) ; this ._rearAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carRearX, carRearY ) ) ; } } else { // spd = this . speed ; if ( spd > this ._friction ) { spd = spd - this ._friction / 1.3 ; } else { spd = 0 ; } if ( this ._privod == FWD ) // , ( ) { carspeedX = Math . cos ( this ._steerAngle ) * spd; carspeedY = Math . sin ( this ._steerAngle ) * spd; this ._frontAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._frontAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; } if ( this ._privod == AWD ) { // , ( ) carspeedX = Math . cos ( this ._steerAngle ) * spd; carspeedY = Math . sin ( this ._steerAngle ) * spd; this ._frontAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._frontAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; carspeedX = Math . cos ( this ._carBody. angle ) * spd; carspeedY = Math . sin ( this ._carBody. angle ) * spd; this ._rearAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._rearAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; } }
var carspeedX, carspeedY, carRearX,carRearY: Number ; if ( this ._privod == FWD ) { // carspeedX = this . drive * Math . cos ( this ._steerAngle ) * ( this ._acceleration ) ; carspeedY = this . drive * Math . sin ( this ._steerAngle ) * ( this ._acceleration ) ; } if ( this ._privod == AWD ) { carspeedX = this . drive * Math . cos ( this ._steerAngle ) * ( this ._acceleration ) ; carspeedY = this . drive * Math . sin ( this ._steerAngle ) * ( this ._acceleration ) ; carRearX = this . drive * Math . cos ( this ._rearAxisBodyRight. angle ) * ( this ._acceleration ) ; carRearY = this . drive * Math . sin ( this ._rearAxisBodyRight. angle ) * ( this ._acceleration ) ; } if ( this . drive ! = 0 ) { if ( this ._privod == FWD ) { // , ( ) this ._frontAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._frontAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; } if ( this ._privod == AWD ) // , ( ) { this ._frontAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._frontAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._rearAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carRearX, carRearY ) ) ; this ._rearAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carRearX, carRearY ) ) ; } } else { // spd = this . speed ; if ( spd > this ._friction ) { spd = spd - this ._friction / 1.3 ; } else { spd = 0 ; } if ( this ._privod == FWD ) // , ( ) { carspeedX = Math . cos ( this ._steerAngle ) * spd; carspeedY = Math . sin ( this ._steerAngle ) * spd; this ._frontAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._frontAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; } if ( this ._privod == AWD ) { // , ( ) carspeedX = Math . cos ( this ._steerAngle ) * spd; carspeedY = Math . sin ( this ._steerAngle ) * spd; this ._frontAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._frontAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; carspeedX = Math . cos ( this ._carBody. angle ) * spd; carspeedY = Math . sin ( this ._carBody. angle ) * spd; this ._rearAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._rearAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; } }
var carspeedX, carspeedY, carRearX,carRearY: Number ; if ( this ._privod == FWD ) { // carspeedX = this . drive * Math . cos ( this ._steerAngle ) * ( this ._acceleration ) ; carspeedY = this . drive * Math . sin ( this ._steerAngle ) * ( this ._acceleration ) ; } if ( this ._privod == AWD ) { carspeedX = this . drive * Math . cos ( this ._steerAngle ) * ( this ._acceleration ) ; carspeedY = this . drive * Math . sin ( this ._steerAngle ) * ( this ._acceleration ) ; carRearX = this . drive * Math . cos ( this ._rearAxisBodyRight. angle ) * ( this ._acceleration ) ; carRearY = this . drive * Math . sin ( this ._rearAxisBodyRight. angle ) * ( this ._acceleration ) ; } if ( this . drive ! = 0 ) { if ( this ._privod == FWD ) { // , ( ) this ._frontAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._frontAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; } if ( this ._privod == AWD ) // , ( ) { this ._frontAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._frontAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._rearAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carRearX, carRearY ) ) ; this ._rearAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carRearX, carRearY ) ) ; } } else { // spd = this . speed ; if ( spd > this ._friction ) { spd = spd - this ._friction / 1.3 ; } else { spd = 0 ; } if ( this ._privod == FWD ) // , ( ) { carspeedX = Math . cos ( this ._steerAngle ) * spd; carspeedY = Math . sin ( this ._steerAngle ) * spd; this ._frontAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._frontAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; } if ( this ._privod == AWD ) { // , ( ) carspeedX = Math . cos ( this ._steerAngle ) * spd; carspeedY = Math . sin ( this ._steerAngle ) * spd; this ._frontAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._frontAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; carspeedX = Math . cos ( this ._carBody. angle ) * spd; carspeedY = Math . sin ( this ._carBody. angle ) * spd; this ._rearAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._rearAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; } }
var carspeedX, carspeedY, carRearX,carRearY: Number ; if ( this ._privod == FWD ) { // carspeedX = this . drive * Math . cos ( this ._steerAngle ) * ( this ._acceleration ) ; carspeedY = this . drive * Math . sin ( this ._steerAngle ) * ( this ._acceleration ) ; } if ( this ._privod == AWD ) { carspeedX = this . drive * Math . cos ( this ._steerAngle ) * ( this ._acceleration ) ; carspeedY = this . drive * Math . sin ( this ._steerAngle ) * ( this ._acceleration ) ; carRearX = this . drive * Math . cos ( this ._rearAxisBodyRight. angle ) * ( this ._acceleration ) ; carRearY = this . drive * Math . sin ( this ._rearAxisBodyRight. angle ) * ( this ._acceleration ) ; } if ( this . drive ! = 0 ) { if ( this ._privod == FWD ) { // , ( ) this ._frontAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._frontAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; } if ( this ._privod == AWD ) // , ( ) { this ._frontAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._frontAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._rearAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carRearX, carRearY ) ) ; this ._rearAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carRearX, carRearY ) ) ; } } else { // spd = this . speed ; if ( spd > this ._friction ) { spd = spd - this ._friction / 1.3 ; } else { spd = 0 ; } if ( this ._privod == FWD ) // , ( ) { carspeedX = Math . cos ( this ._steerAngle ) * spd; carspeedY = Math . sin ( this ._steerAngle ) * spd; this ._frontAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._frontAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; } if ( this ._privod == AWD ) { // , ( ) carspeedX = Math . cos ( this ._steerAngle ) * spd; carspeedY = Math . sin ( this ._steerAngle ) * spd; this ._frontAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._frontAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; carspeedX = Math . cos ( this ._carBody. angle ) * spd; carspeedY = Math . sin ( this ._carBody. angle ) * spd; this ._rearAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._rearAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; } }
var carspeedX, carspeedY, carRearX,carRearY: Number ; if ( this ._privod == FWD ) { // carspeedX = this . drive * Math . cos ( this ._steerAngle ) * ( this ._acceleration ) ; carspeedY = this . drive * Math . sin ( this ._steerAngle ) * ( this ._acceleration ) ; } if ( this ._privod == AWD ) { carspeedX = this . drive * Math . cos ( this ._steerAngle ) * ( this ._acceleration ) ; carspeedY = this . drive * Math . sin ( this ._steerAngle ) * ( this ._acceleration ) ; carRearX = this . drive * Math . cos ( this ._rearAxisBodyRight. angle ) * ( this ._acceleration ) ; carRearY = this . drive * Math . sin ( this ._rearAxisBodyRight. angle ) * ( this ._acceleration ) ; } if ( this . drive ! = 0 ) { if ( this ._privod == FWD ) { // , ( ) this ._frontAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._frontAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; } if ( this ._privod == AWD ) // , ( ) { this ._frontAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._frontAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._rearAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carRearX, carRearY ) ) ; this ._rearAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carRearX, carRearY ) ) ; } } else { // spd = this . speed ; if ( spd > this ._friction ) { spd = spd - this ._friction / 1.3 ; } else { spd = 0 ; } if ( this ._privod == FWD ) // , ( ) { carspeedX = Math . cos ( this ._steerAngle ) * spd; carspeedY = Math . sin ( this ._steerAngle ) * spd; this ._frontAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._frontAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; } if ( this ._privod == AWD ) { // , ( ) carspeedX = Math . cos ( this ._steerAngle ) * spd; carspeedY = Math . sin ( this ._steerAngle ) * spd; this ._frontAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._frontAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; carspeedX = Math . cos ( this ._carBody. angle ) * spd; carspeedY = Math . sin ( this ._carBody. angle ) * spd; this ._rearAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._rearAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; } }
var carspeedX, carspeedY, carRearX,carRearY: Number ; if ( this ._privod == FWD ) { // carspeedX = this . drive * Math . cos ( this ._steerAngle ) * ( this ._acceleration ) ; carspeedY = this . drive * Math . sin ( this ._steerAngle ) * ( this ._acceleration ) ; } if ( this ._privod == AWD ) { carspeedX = this . drive * Math . cos ( this ._steerAngle ) * ( this ._acceleration ) ; carspeedY = this . drive * Math . sin ( this ._steerAngle ) * ( this ._acceleration ) ; carRearX = this . drive * Math . cos ( this ._rearAxisBodyRight. angle ) * ( this ._acceleration ) ; carRearY = this . drive * Math . sin ( this ._rearAxisBodyRight. angle ) * ( this ._acceleration ) ; } if ( this . drive ! = 0 ) { if ( this ._privod == FWD ) { // , ( ) this ._frontAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._frontAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; } if ( this ._privod == AWD ) // , ( ) { this ._frontAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._frontAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._rearAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carRearX, carRearY ) ) ; this ._rearAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carRearX, carRearY ) ) ; } } else { // spd = this . speed ; if ( spd > this ._friction ) { spd = spd - this ._friction / 1.3 ; } else { spd = 0 ; } if ( this ._privod == FWD ) // , ( ) { carspeedX = Math . cos ( this ._steerAngle ) * spd; carspeedY = Math . sin ( this ._steerAngle ) * spd; this ._frontAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._frontAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; } if ( this ._privod == AWD ) { // , ( ) carspeedX = Math . cos ( this ._steerAngle ) * spd; carspeedY = Math . sin ( this ._steerAngle ) * spd; this ._frontAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._frontAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; carspeedX = Math . cos ( this ._carBody. angle ) * spd; carspeedY = Math . sin ( this ._carBody. angle ) * spd; this ._rearAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._rearAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; } }
var carspeedX, carspeedY, carRearX,carRearY: Number ; if ( this ._privod == FWD ) { // carspeedX = this . drive * Math . cos ( this ._steerAngle ) * ( this ._acceleration ) ; carspeedY = this . drive * Math . sin ( this ._steerAngle ) * ( this ._acceleration ) ; } if ( this ._privod == AWD ) { carspeedX = this . drive * Math . cos ( this ._steerAngle ) * ( this ._acceleration ) ; carspeedY = this . drive * Math . sin ( this ._steerAngle ) * ( this ._acceleration ) ; carRearX = this . drive * Math . cos ( this ._rearAxisBodyRight. angle ) * ( this ._acceleration ) ; carRearY = this . drive * Math . sin ( this ._rearAxisBodyRight. angle ) * ( this ._acceleration ) ; } if ( this . drive ! = 0 ) { if ( this ._privod == FWD ) { // , ( ) this ._frontAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._frontAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; } if ( this ._privod == AWD ) // , ( ) { this ._frontAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._frontAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._rearAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carRearX, carRearY ) ) ; this ._rearAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carRearX, carRearY ) ) ; } } else { // spd = this . speed ; if ( spd > this ._friction ) { spd = spd - this ._friction / 1.3 ; } else { spd = 0 ; } if ( this ._privod == FWD ) // , ( ) { carspeedX = Math . cos ( this ._steerAngle ) * spd; carspeedY = Math . sin ( this ._steerAngle ) * spd; this ._frontAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._frontAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; } if ( this ._privod == AWD ) { // , ( ) carspeedX = Math . cos ( this ._steerAngle ) * spd; carspeedY = Math . sin ( this ._steerAngle ) * spd; this ._frontAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._frontAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; carspeedX = Math . cos ( this ._carBody. angle ) * spd; carspeedY = Math . sin ( this ._carBody. angle ) * spd; this ._rearAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._rearAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; } }
var carspeedX, carspeedY, carRearX,carRearY: Number ; if ( this ._privod == FWD ) { // carspeedX = this . drive * Math . cos ( this ._steerAngle ) * ( this ._acceleration ) ; carspeedY = this . drive * Math . sin ( this ._steerAngle ) * ( this ._acceleration ) ; } if ( this ._privod == AWD ) { carspeedX = this . drive * Math . cos ( this ._steerAngle ) * ( this ._acceleration ) ; carspeedY = this . drive * Math . sin ( this ._steerAngle ) * ( this ._acceleration ) ; carRearX = this . drive * Math . cos ( this ._rearAxisBodyRight. angle ) * ( this ._acceleration ) ; carRearY = this . drive * Math . sin ( this ._rearAxisBodyRight. angle ) * ( this ._acceleration ) ; } if ( this . drive ! = 0 ) { if ( this ._privod == FWD ) { // , ( ) this ._frontAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._frontAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; } if ( this ._privod == AWD ) // , ( ) { this ._frontAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._frontAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._rearAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carRearX, carRearY ) ) ; this ._rearAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carRearX, carRearY ) ) ; } } else { // spd = this . speed ; if ( spd > this ._friction ) { spd = spd - this ._friction / 1.3 ; } else { spd = 0 ; } if ( this ._privod == FWD ) // , ( ) { carspeedX = Math . cos ( this ._steerAngle ) * spd; carspeedY = Math . sin ( this ._steerAngle ) * spd; this ._frontAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._frontAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; } if ( this ._privod == AWD ) { // , ( ) carspeedX = Math . cos ( this ._steerAngle ) * spd; carspeedY = Math . sin ( this ._steerAngle ) * spd; this ._frontAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._frontAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; carspeedX = Math . cos ( this ._carBody. angle ) * spd; carspeedY = Math . sin ( this ._carBody. angle ) * spd; this ._rearAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._rearAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; } }
var carspeedX, carspeedY, carRearX,carRearY: Number ; if ( this ._privod == FWD ) { // carspeedX = this . drive * Math . cos ( this ._steerAngle ) * ( this ._acceleration ) ; carspeedY = this . drive * Math . sin ( this ._steerAngle ) * ( this ._acceleration ) ; } if ( this ._privod == AWD ) { carspeedX = this . drive * Math . cos ( this ._steerAngle ) * ( this ._acceleration ) ; carspeedY = this . drive * Math . sin ( this ._steerAngle ) * ( this ._acceleration ) ; carRearX = this . drive * Math . cos ( this ._rearAxisBodyRight. angle ) * ( this ._acceleration ) ; carRearY = this . drive * Math . sin ( this ._rearAxisBodyRight. angle ) * ( this ._acceleration ) ; } if ( this . drive ! = 0 ) { if ( this ._privod == FWD ) { // , ( ) this ._frontAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._frontAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; } if ( this ._privod == AWD ) // , ( ) { this ._frontAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._frontAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._rearAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carRearX, carRearY ) ) ; this ._rearAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carRearX, carRearY ) ) ; } } else { // spd = this . speed ; if ( spd > this ._friction ) { spd = spd - this ._friction / 1.3 ; } else { spd = 0 ; } if ( this ._privod == FWD ) // , ( ) { carspeedX = Math . cos ( this ._steerAngle ) * spd; carspeedY = Math . sin ( this ._steerAngle ) * spd; this ._frontAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._frontAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; } if ( this ._privod == AWD ) { // , ( ) carspeedX = Math . cos ( this ._steerAngle ) * spd; carspeedY = Math . sin ( this ._steerAngle ) * spd; this ._frontAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._frontAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; carspeedX = Math . cos ( this ._carBody. angle ) * spd; carspeedY = Math . sin ( this ._carBody. angle ) * spd; this ._rearAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._rearAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; } }
var carspeedX, carspeedY, carRearX,carRearY: Number ; if ( this ._privod == FWD ) { // carspeedX = this . drive * Math . cos ( this ._steerAngle ) * ( this ._acceleration ) ; carspeedY = this . drive * Math . sin ( this ._steerAngle ) * ( this ._acceleration ) ; } if ( this ._privod == AWD ) { carspeedX = this . drive * Math . cos ( this ._steerAngle ) * ( this ._acceleration ) ; carspeedY = this . drive * Math . sin ( this ._steerAngle ) * ( this ._acceleration ) ; carRearX = this . drive * Math . cos ( this ._rearAxisBodyRight. angle ) * ( this ._acceleration ) ; carRearY = this . drive * Math . sin ( this ._rearAxisBodyRight. angle ) * ( this ._acceleration ) ; } if ( this . drive ! = 0 ) { if ( this ._privod == FWD ) { // , ( ) this ._frontAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._frontAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; } if ( this ._privod == AWD ) // , ( ) { this ._frontAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._frontAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._rearAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carRearX, carRearY ) ) ; this ._rearAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carRearX, carRearY ) ) ; } } else { // spd = this . speed ; if ( spd > this ._friction ) { spd = spd - this ._friction / 1.3 ; } else { spd = 0 ; } if ( this ._privod == FWD ) // , ( ) { carspeedX = Math . cos ( this ._steerAngle ) * spd; carspeedY = Math . sin ( this ._steerAngle ) * spd; this ._frontAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._frontAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; } if ( this ._privod == AWD ) { // , ( ) carspeedX = Math . cos ( this ._steerAngle ) * spd; carspeedY = Math . sin ( this ._steerAngle ) * spd; this ._frontAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._frontAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; carspeedX = Math . cos ( this ._carBody. angle ) * spd; carspeedY = Math . sin ( this ._carBody. angle ) * spd; this ._rearAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._rearAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; } }
8)最後の仕上げ:
- public function get speed ( ) : 数値 {
- この ._carBodyを返します。 体の GetLinearVelocity ( ) 。 長さ ( ) ;
- }
合計
その結果、次のような結果が得られます。
narod.ruのデモSWF
megaswf.comのデモ(できればフルスクリーン)
ps何らかの理由で、コード全体を後ほど投稿します。