 こんにちは、Habrausers様。
こんにちは、Habrausers様。
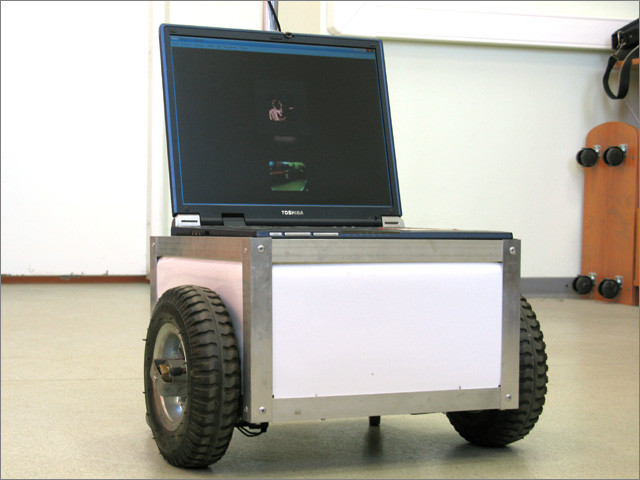
それはすべて、ニュースで一度、AnyBotのテレプレゼンスロボット(写真の左側)を見たという事実から始まりました。 これが彼らの2番目のロボットであり、そのコストを30キロドルから15キロドルに半減することができました。 この量は、「ホイール上のウェブカメラ」には少なすぎるように思えました。 このボットには、高解像度と光学ズームを備えた非常に優れたメインカメラに加えて、追加の「ナビゲーションカメラ」、全方向性、狭焦点マイク、その他のプロ用デバイスが搭載されています。 しかし、それにもかかわらず、同じお金であなたは真新しい車を買うことができます。 したがって、純粋にスポーツの関心から、手元の手段から最小限のコストで最も簡単なテレプレゼンスデバイスを作成することが決定されました。 「手元に」あるのは、父の東芝サテライトラップトップで、バッテリーが切れており、LPTポートが有効で、Nivaのパワーウィンドウモーターなどがあります。
これが何をもたらしたのか、あなたはカットの下で見つけることができます。
ノートブック:
ギアモーター:
機械部品
まず、ラップトップの電源の問題を解決する必要があります。 これを行うには、バッテリーを追加したUPSを長持ちさせる必要があります。 同時に、ラップトップの220Vに加えて、12ボルトを流してエンジンに電力を供給します。 したがって、トロリーの寸法は東芝と一本のサイズによって決まります。

最も単純なホイール構成を選択します。2つのメインホイールと独立したドライブ、さらに1組の自由に回転する家具ホイールです。 これを行うには、反対側のドアから2番目のギアモーターを購入する必要があります。 私は駆動輪を実験しませんでした、私は家庭用ロボットの「古典」を購入しました-中国のPR-1400。 彼らは非常に快適で、すでにベアリングが付属しています。

誰もがエンジンをホイールに接続する独自の方法を考案していますが、このアイデアは、TechnoVisionなどの既製のものと同様に使用できます。 このアセンブリを同じ場所で購入することもできます。 ただし、1つのノードのコストがカートの予算全体よりも高いため、このオプションは私には適していません。 だから自分でやる。 ユニットの主要部分は、建物の角のスクラップと1/2インチの水道管から簡単に調理でき、ファイルによって目的の直径に変更されます。 もちろん、旋盤を使用するか、より適切なパイプを見つけることをお勧めしますが、私は近くでどちらかを見つけていません。 ドライブシャフトとして、ソケットヘッドエクステンションを使用すると非常に便利です。 車輪の綱は適切な金属板から曲げられています。 私の場合、棚を固定するための切れ目のないコーナーであることが判明しました。 残念ながら、リーシュの金属は柔らかく、それによってすぐにバックラッシュが形成され、ヘッドエクステンションは手袋のように鋭利なエンジンのシャフトに座っていました。

トロリー自体は、アルミニウムの角と25mmの正方形、および底部に亜鉛メッキ鋼片で組み立てられています。 ホイールアセンブリは下部フレームに固定され、非常にコンパクトに配置されています。
トロリーアセンブリ:

取り付けられたホイールアセンブリ:
これで、基本的なメカニズムの準備は完了です。次に、頭を動かしましょう。 もちろん、Logitech Quickcam Orbit AF Webカメラのような傾斜制御カメラを見つける場合、またはビデオキャプチャモジュールでセキュリティカメラを使用する場合は特に、Webカメラに自分自身を制限することができます。 しかし、私はすでに特定の名前のないカメラを持っているので、どちらにもお金を費やすことを敢えてしなかったので、それを使用します。 ナビゲーションに関する従来のWebカメラの欠点の1つは、視野角が小さすぎることです。これは、オンラインストアで販売されている特別なアタッチメントで拡大できます。 私は簡単に行動しました-ドアののぞき穴を切り取り、そこから散乱レンズを引き出し、カメラのレンズに貼り付けました。 また、ナビゲーションのために、カメラを下げて「足下」を見ることができることが望ましい。 そのため、角の残りから頭を集め、ボルトからヒンジで亜鉛メッキします。 カメラとレーザーポインターを人差し指として取り付けます。 ヘッドチルトを駆動するには、ラジオモデルのサーボまたはギアボックス付きのエンジンを使用できます。 同じガレージで、私たちの「シェビーニバ」の電子チルトコントロール付きの壊れたミラーを見つけました(ちなみに、ミラードライブモジュールは米国で製造され、エンジン自体は中国で製造されているため、彼はカートに着く前に世界一周旅行をしました) このエンジンのギアボックスの出力軸の速度は非常に低く、4秒で約1回転します。これは非常に便利です。 「首」の根元に連結されたシャフトを接続し、チルトドライブの準備ができました。 その動きを制限するために、並列ダイオードを備えたリミットスイッチを追加する価値があります。 したがって、電圧が印加されると、エンジンは「ヘッド」を下げ、リミットスイッチに到達して停止します。 頭を上げるには、極性を変える必要があります。 ファイバーグラスやその他の素材を使用している人なら誰でも使用できますが、張り子マシェからヘッドカバーを作成します。
修理から残ったアクリルパテで得られた蓋をパテするというアイデアはあまり成功していませんでしたが、これは写真にはっきりと示されています。 しかし、実験にとって重要ではありません。 得られた頭部を中国製モップの折り畳みハンドルに置き、トロリーに固定します(輸送中に高い構造物を分解できるように、すべての取り外し可能なジョイントを蝶ナットで取り外しました)。

これで、「鉄」の仕事は終わりましたが、内側を隠すために、私はまだ上下の層の間にプラスチックパネルの破片を挿入しました。
電子部品
ここで、コンピューターをエンジンとレーザーポインターに接続する必要があります。 LPTポートがあると、外部コントローラーなしで実行できるため、タスクが非常に容易になります。 もちろん、最新のLPTネットブックでは、日中は火事のある港はありませんが、nanoまたはmini-ITXのネットトップとシンクライアントでは通常そこにあります。 そのため、小さな電流とポート電圧を使用してモーターを制御し、逆の可能性があるドライバーが必要です。 私は電子工学の絶対的な初心者なので、リバース用のスイッチングリレーと速度制御用のNチャネル電界効果トランジスタで、最も単純なドライバー回路を選択しました。
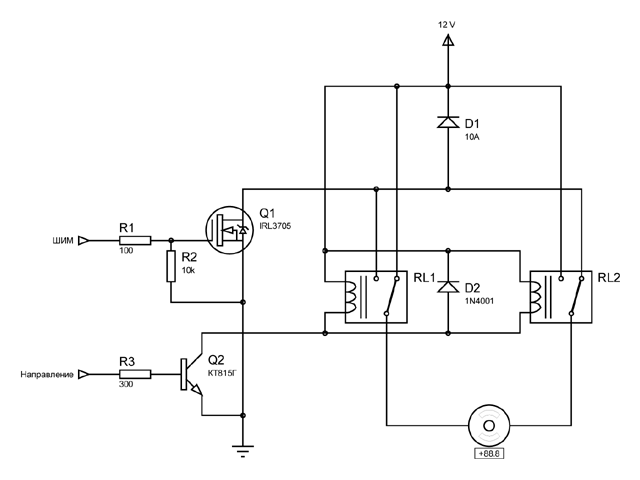
パルス幅変調(PWM)によって速度を調整します。つまり、電源をすばやくオンおよびオフにし、オンとオフの時間の比率に応じて、速度も変化します。 私たちのメインエンジンは10アンペア以下しか消費しません。 これに基づいて、コンポーネントを選択します。 2つのグループのスイッチを備えたリレーを見つけることが望ましいため、現在の電流に合わせて設計する必要があります。または、車の5ピンリレーを2つ用意することもできます。 追加のドライバなしで電界効果トランジスタを使用しました。 これは、回路の点では簡単ですが、いくつかの制限があります。 まず、IRLシリーズなどの低い開放電圧のトランジスタが必要です。次に、LPTポートの小さな電流では、ゲート(より正確には、ゲートとトランジスタチャネル間の浮遊容量)をすばやく再充電できません。つまり、PWM周波数を大きくすることはできません。 これは重要ではありませんが、エンジンは超音波周波数を使用する場合よりも多くのノイズを発生します。 ラジエーターのないTO-220ABパッケージのトランジスターは約1ワット消費します。 したがって、オープン状態でのチャネル抵抗は0.01オーム未満でなければなりません。 これは、トランジスタの2番目の重要な特性です。 トランジスタが閉じていても誘導性負荷の無効電流が流れ、ブレークダウンに至らないように、回路内のダイオードが必要です。 また、この場合のエンジンは、電源がオフのときにブレーキをかけずに回転します。これはPWMにとって重要です。 ダイオードも10アンペアの電流を保持する必要があります。 私はそのようなものを見つけず、2つの6アンペアを並行してオンにしました。 したがって、エンジンごとに2ビットの制御を取得します。1つは電源をオンにし、2つ目は逆にします。
当社のヘッドチルトエンジンの消費電流は1桁少ないため、完成したドライバーチップL293Dを使用できます。 これは、誘導負荷から保護するためのダイオードを内蔵した4チャンネルモータードライバーで、チャンネルあたり最大0.6アンペアを供給できます。 このようなマイクロ回路は、4つのコレクターモーターをリバースなしで、2つのコレクターモーターをリバース付きで、1つの4極ステッピングモーターを制御できます。 頭にモーターが1つしかないため、チャンネルのペアを組み合わせて、可能な負荷電流を1.2アンペアに増やしました。 次に、コントロールについて説明します。 実際、3ビットの制御を取得します。1つはチップをオンにし(有効)、2つ目はエンジンの1つのチャネルに電圧を供給し、3つ目は2つ目のチャネルに供給します。 PWMの場合、ドキュメントでは、チャネルの1つではなく、チップ全体(より正確には、はんだ付けしない場合は半分)をオンまたはオフにすることをお勧めします。この場合、エンジンはアクティブにブレーキをかけません。 しかし、3ビットの制御は私には冗長なようです。4つの組み合わせしか持っていないので、2つに減らしましょう。 これを行うには、別のチップを追加します-論理「OR」、チャネルの状態を入力し、出力をドライバーのイネーブル入力に接続します。 したがって、2ビットで、エンジンのすべての可能な状態をカバーします。00-自由回転(PWM-aの場合)、01-一方向の回転、10-反対方向の回転、11-ブレーキング。
ボードにロジックチップが表示されたため、それらに電力を供給するために5ボルトが必要です。 12のうち5ボルトを作る最も簡単な方法は、リニアスタビライザー(LM)7805(または家庭用アナログ-KR142EN5)を使用することです。 大量に消費する場合、特に適しているわけではありませんが、2つの標準的なロジックマイクロサーキットには十分です。
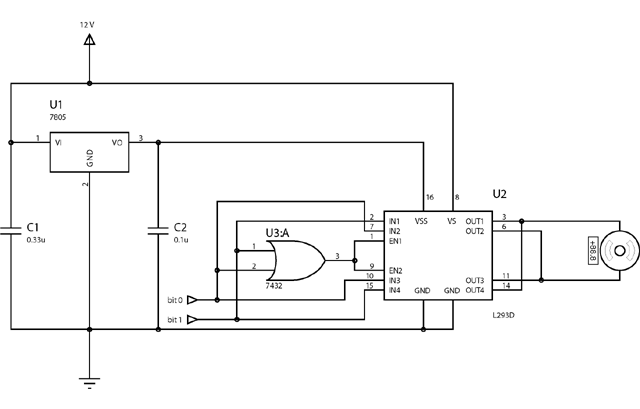
レーザーポインターを接続するために残ります。 私のポインターは、4.5ボルトと数十ミリアンペアで駆動されていました。 つまり、LPTポートの出力に直接接続できます。 しかし、LPTポート上のラップトップでは、論理ユニットが5ボルトに達しておらず、ポインターがほとんど輝いていないことが判明しました。 そのため、ORチップをアンプとして再度使用する必要がありました。
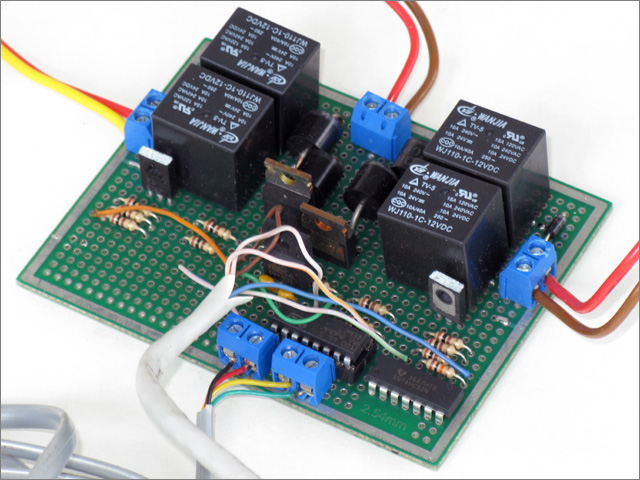
さて、回路とコンポーネントがわかったので、今でははんだ付けと部品に残っています。 自宅でレーザーアイロンを見つけられなかったため、ブレッドボードを使用しましたが、非常に便利でした。 ボードの横には、Arduino Nano用の場所を残しました。これにより、LPTポートなしでプラットフォームに簡単に移行できます。
そのため、すべての鉄が収集され、それを動かします。
ソフトウェア部
ソフトウェアの観点から、いくつかの実装オプションがあります。 別のクライアントサーバー、Webサービスを作成することも、車輪を再発明せずにSkypeを使用することもできます。 彼はすでにオーディオビデオストリームの双方向伝送、チャット、および制御に使用できる追加のチャネルを実装しています。 どちらを選択します。
サーバー
サーバータスク:Skypeからの呼び出しの受信、制御コマンドの受信、カートの移動。
まず、ボットを管理する方法を彼に教えます。 私はラップトップにWindowsを持っているので、そのために書きます。 残念ながら、Windows XPではポートを直接操作することはできませんが、インターネットでinpout32.dllライブラリが見つかったため、この制限が回避されています。 これで、ポートの各ビットを直接制御できるようになりました。 時間間隔をカウントするために、マルチメディアタイマー(timeSetEvent関数)を使用しました。これにより、1ミリ秒から間隔を設定できます。 各エンジンのハンドラーで、オンとオフになったティックの数をカウントし、現在の速度に応じてエンジンをオンにするための出力ビットを切り替えます。 したがって、電界効果トランジスタは少なくとも1ミリ秒の間各状態にあり、浮遊容量を再充電するには十分すぎることがわかります。 真のPWMはあまり一般的ではありません。パルスのデューティサイクルだけでなく、エンジンの実行中に聞こえる周波数も変化します。 また、トロリーがぎくしゃくしないように、プログラムで加速を制限します。 トロリーを個別のオブジェクトとして制御するためのプログラミングインターフェイスを作成し、Skypeにアクセスできます。
Skypeは、外部アプリケーションと対話するための非常にシンプルなインターフェイスを提供します。 各オペレーティングシステムには独自のシステムがありますが、一般的な非同期テキストプロトコルに基づいています。 サーバー部分は次のように機能します。着信コールに応答し、ビデオをオンにし、発信者からコマンドを受信します。 Sparkyプロジェクトで行われたように、Skypeチャットを使用してコマンドを転送できますが、チャットを乱雑にすることはあまり良くありません。 さらに、Skypeは、アプリケーションからアプリケーションへのコマンド(AP2AP)を使用して、アプリケーション間で直接通信する機能を提供します。 データの転送には2つのオプションがあります。1つ目は、接続と受信の確認を行う通常のTCPソケットに似ています。2つ目は、UDPデータグラム、つまり、接続と確認を確立せずにメッセージを送信します。 念のため、サーバー側では、チャット、ソケット、データグラムの3つのプロトコルすべてでコマンドを受信するように実装しました。 したがって、チャットを介して、クライアントプラグインなしでボットを制御できます。 遅延と通信の損失に対する受動的な保護として、彼は最後のコマンドを受信してから300 ms後にボットを強制的に停止しました。 この時間中、彼は最高速度で20cmを超えて通過しません。
お客様
クライアントは十分に受動的です。 起動後、すぐに折りたたむことができます。 彼がしていること:Skypeに接続し、コールが開始されるのを待ちます。コールがAP2APを呼び出しているユーザーとの接続を確立しようとした後、これが成功すると、キーボードとマウスの監視を開始し、確立された接続を介してコマンドを送信します。 Ctrl + Altを押すと、ウィンドウにコントロールがキャプチャされます。 したがって、ビデオチャットウィンドウから直接ボットを制御できます。
両方のプログラムのソースコードは、 ここからダウンロードできます 。
結果
完全に成長しているボット:

カートのクローズアップ:
ビデオでは、彼女の乗り方を見ることができます。
1つのリスト内のすべての機能:
- Skypeを介した管理(クライアントはこれまでWindows専用ですが、電話からでもチャットで制御できます)。
- WiFi経由のネットワーク接続。
- カートの2自由度(前後に移動、旋回、その場を含む);
- 傾いた頭;
- 視野角〜水平方向に80度。
- カメラの画像の中心に合わせたレーザーポインター。
- 可変ヘッド高さ;
- 低重心(誤ってトロリーを傾けることは非常に困難です);
費用
コンポーネントのほとんどが「故郷のビン」で見つかったため、コストを完全に決定することは困難です。 ただし、大まかに見積もることができます。
- メインホイール(PR-1400):2 * 465 = 930r;
- パワーウィンドウからのエンジン(実際、私は1つだけを購入しました):2 * 550 = 1.100r;
- 構造要素(プロファイル、ヘッドエクステンション、家具の車輪、ボルト、ナット、ワッシャー、リベット):〜500r;
- 電子部品(ブレッドボード、リレー、トランジスタ、ダイオード、マイクロチップ、コネクタなど):〜500r。
合計:〜3.000r。
これに追加:
- コンピューター(タブレットコンピューター、ネットブック、ネットトップ、シンクライアント、またはNano-、Mini-ITXから独立して作成された...):5.000〜25.000;
- カメラ(組み込みでない場合、またはウェブカメラ、アナログ監視カメラ+ビデオキャプチャカード、IPカメラ):200〜30.000;
- バッテリーおよび充電器(UPSまたは個別、鉛またはリチウム):1.000〜10.000r;
- コントローラー(LPTポートがない場合、または十分でない場合):〜1000r;
- ヘッドチルト用エンジン:200〜500r。
したがって、最も安価なコンポーネントを使用して10.000rを満たすことができ、最も高価なコンポーネントを使用して2.500ドルを満たすことができます。
藤堂
これがテレプレゼンスロボットの最も基本的な実装であることは明らかです。そのため、この記事の中でこれを呼び出しませんでした。 彼は完全な仕事のために何が欠けていますか? リストしてみましょう:
- より信頼性の高いエンジン(ウィンドウギアモーターは長期動作用に設計されていません);
- 超音波エンジンドライバー;
- 速度制御用のエンコーダー(エンジンの動作は少し異なり、カートは直線を保持しません);
- エンジン用の外部コントローラー。
- 衝突を防ぐための超音波、赤外線またはレーザーセンサー;
- 優れたマイク(2つが優れている-すべての指向性と狭い指向性);
- より良いカメラ(より良い2-ナビゲーション用の魚眼レンズと通常の光学ズーム);
- 充電用ベース;
- 管理を簡素化するためのある程度の自律性(障害物の回避、ターゲットの追跡、ベースへの復帰);
- まともな体;
つまり、すべてをゼロからやり直しやすくなります。
もちろん、これがすべて実現した場合、コストは前のセクションからの最高の見積もりと比較して1.5-2だけ再び増加し、3,500〜5,000ドルに達します。 さらに、仕事、税金、部屋のレンタル、ソフトウェア開発。 そのため、高品質のテレプレゼンスロボットの製作は当初のように安上がりではありませんが、ご自身のニーズに合わせて非常に安価に行うことができます。
便利なリンク
- SkypeパブリックAPI 。
- コレクターモータードライバーの議論 。
- 自家製: スパーキー ; セルフドッキングテレプレゼンスロボット iRobot +ネットブック 。
- 商用例: Anybots ; ジャズ Vgo ; ギラフ RBot ; SuperDroid RP2W 。
- Texai(同じシェルドン)