
Festo Didacticによって製造されたRobotino®ロボットの技術紹介を紹介します 。 このレビューは、一般的な技術情報と、このロボットでの実験および研究中に得られた詳細で構成されています。
Robotino移動ロボットは、全方向型の3つのローラーベアリング(全方向、全方向に動作)を備えた自律型モバイルプラットフォームです。 ロボットの動きは、3つのDCモーターによって実行されます。DCモーターの軸は、互いに120度の角度で配置されています。 この設計のおかげで、このロボットは、軸の周りを回転し、幾何学的な中心を360度通り抜けることができるので、移動平面上のすべての方向に移動できます。
ドライブ技術
興味深い設計上の特徴は、駆動技術、つまりジオメトリです。これは次の設計です。

1-エンジン、2-タコメーター、3-ローラー、4-ギアボックス、5-ベルト駆動。
各エンジンのシャフトの回転速度は、ギア比16:1のギアボックスを使用して、対応するホイールの軸に伝達されます。 さらに、モーターシャフトの回転角速度の測定はインクリメンタルタコメーターを使用して実行され、ロボットの3方向の直線速度:前方、横方向、およびその軸の周りの回転は、エンジンの角速度の測定に応じて再計算されます。
運営管理
ロボットは、WLANワイヤレスチャネルを介して、またロボットのメモリに記録された事前に準備されたプログラムを使用して、リモートで制御できます。 オフライン作業は、充電式バッテリーによって提供されます。 Robotinoは、組み込みLinuxオペレーティングシステム(OS)で実行されます。 モーターシャフトの回転角速度とロボットの直線速度を設定および測定できる一連の機能(コマンド)があります。
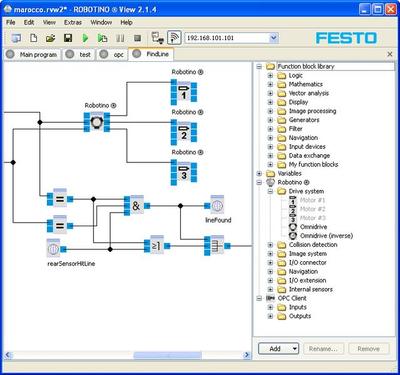
ロボットにはRobotinoViewが付属しています。これは、制御信号、センサー、入力および出力の状態を表示するグラフィカルインターフェイスを備えたソフトウェアです。 ロボットのプログラムは、使用可能なリストから必要な機能ブロックの選択、グラフィカルモードでのそれらの組み合わせと設定、関数と係数を使用した数学制御パラメーターの設定(ビジュアルプログラミング)に基づいて作成できます。 RobotinoViewプログラミングは、Windows用の高レベル言語C ++ APLおよびLinux用のC ++ APLを使用して可能です。 モニターとキーボードをロボットに接続すると、ロボットの自律プログラミングが可能になります。

ハードウェア
Robotinoハードウェアは、次のサブシステムで構成されています。
- 電源システム-充電式バッテリー、ロボットが数時間オフラインで作業できるようにする充電器。
- 推進システム-3つのDCモーター、ギアボックス、ローラーベアリングホイール、ロボットが異なる方向に移動できるようにする、ベルト駆動。 3つのロボットモーターのそれぞれのシャフト回転速度を安定させるために、定義済みの係数を備えた組み込みの比例積分微分(PID)コントローラーが使用されることに注意してください。
- エンジン速度を測定するための測定システム(タコメーター)。
- 外部ホストコンピューター(Wi-Fiアクセスポイント)との無線通信システム。
- すべてのロボットシステムと対話する統合制御コンピューターは、MOPSlcdVEと互換性のあるPC 104プロセッサー、300 MHz、コンパクトフラッシュカード(1024 MB)の2つのコンポーネントで構成されています。
- I / O回路基板は、コンピューターとセンサー、モーター、およびRobotino I / Oインターフェイスとの通信を確立します。
内部ソフトウェアが含まれます:
- Linuxオペレーティングシステム(OS)は、ハードウェアおよびソフトウェアと対話し、内部コマンドを処理し、外部制御コンピューターとデータを交換します。
- 自律制御のためにロボットメモリに保存されたプログラム。
外部ソフトウェアが含まれます:
- Robotinoとの通信およびデータ交換のための一連のメソッドを持つC ++、C#クラスを使用するプログラム。
- ロボットを制御するためのロードされたライブラリを備えたMatlab / Simulinkビジュアルデザイン環境。
- ビジュアルデザイン環境RobotinoView。
- 仮想シミュレータRobotinoSimは、実際のRobotinoではなく、その仮想コピーで動作する機能を提供します。
注:ソフトウェアから来てロボットに送信されるすべての制御コマンドは順番に実行されます。ロボットは複数のコマンドを同時に実行できません。 したがって、適切なコマンドをロボットに送信した後、制御プログラムはこのコマンドの実行を開始し、プログラムに制御を戻すまで中断されます。 したがって、コマンドが発行されてから実行されるまでの時間と、次のコマンドの間には、コマンドが無線チャネルを介してロボットに送信された時間、およびRobotino OSコマンドが処理された時間とその実行の開始に関連する遅延があります。 経験的に、各コマンドの実行時間は可変値であることがわかりました。これは、ロボットOSのコマンドキューの実行の遅延またはWi-Fi通信チャネルの不安定性による可能性があります。 したがって、3つのエンジンの1つにコマンドを与える時間は平均0.009秒です。 1つのタコメーターからの測定時間は0.002秒です。
結論の代わりに、ロボットは動作しています
ご清聴ありがとうございました。