Navigation under water: pelenguy - not pelenguy, you are doomed to success
The first commercially available domestic underwater acoustic navigation UKB-system
We do not lose pace. Since the publication of our previous article, Underwater GPS: the continuation has been almost a whole summer and today I will tell you what we have been doing all this time.
In the first article about our underwater GPS, we did a brief overview of existing positioning systems and underwater acoustic in particular.
Under the cut, I will talk about how we made the ultrashort basis system.
So, in the 2015th year, we have ever committed ourselves to deal with UKB (USBL - ultrashort base-line) systems. The essence of these systems is in the presence of a signal source (beacon responder, for example) and an antenna, which determines the direction of signal arrival. Phased array or simply: direction-finding antenna.
Many of our users in one way or another expressed the relative inconvenience of the buoy placement procedure, and the fact that the coordinates are worked out “below” (as in our underwater GPS).
Sometimes you
Directional antenna thing is quite common. For example, submarines have conformal antenna arrays containing thousands of individual transducers. Of course, it cannot be said that nobody has done UKB systems in the Russian Federation before us. However, as far as we know, ours is the first domestic system available commercially (and generally the most affordable!).
But nothing in this universe is free. For the convenience you have to pay. As our colleague, who developed the algorithm for the direction finding system and is the author of the direction finding antenna firmware, says:
“A UCB user will enjoy ease of deployment .... first 10-15 minutes. Just as much as it took to place the buoys of the long-range system in the water area ”.
The fact is that the error in estimating the arrival time by 1-2 meters in the long-base system does not make special weather, since ± 1 meter is a completely acceptable error in the tasks of positioning divers or robots.
The error in determining the “first” or “direct” beam, in the case of the UCB system, will lead to the determination of the direction of arrival of some reflection (or the sum of reflections - “rays”), but it can come from anywhere, everything depends on the specific water area. This is especially true for the determination of the vertical angle. Catch the reflection from the surface or from the bottom and now you have a variation of values in the range of 90 degrees, and this is so-so navigation system.
In modern systems (and in ours too) the vertical angle is not taken into account. Instead, the responder beacon has a built-in depth sensor and can transmit its depth upon the request of the direction finding antenna. Further, knowing the depth difference and the slant range, the distance along the surface is determined trivially from the Pythagorean theorem.
Plus, the task of positioning the antenna itself is separate. Being lowered on a cable from a support vessel or from a pier, it chats and turns in waves and currents. Accordingly, if the angle of arrival of the signal is determined in the coordinate system of the antenna, and it is unstable, then this instability goes into the calculated position of the object being positioned.
Often, to avoid such problems, the antenna is mounted on a rod. We do that too, even though our antenna has built-in AHRS.
We called our system Zima.
Our system consists of the most direction-finding transmit-receive antenna Zima-B (ase). It can be seen in the photo below.

Figure 1 - Zima-B - direction-finding antenna mounted on a rod
And Zima-R responder beacons (esponder), which can be either standalone, equipped with a battery pack (as pictured), and interfaced with the carrier.
In this case, the user becomes available all our innovations and amenities:
- the ability to transfer up to 32 remote control commands
- mutual measurement of the distance to the direction finding antenna
- transmission of azimuth to the base station (if there is a device on the carrier that determines the direction to the north - a compass to the common people)
The responder beacon is in the same form factor as our underwater GPS receiver RedNODE. As already mentioned, it has a built-in pressure / temperature sensor for a range of 0-30 Bar and allows to obtain an accuracy of up to 0.05 m in depth and up to 0.1 degrees in temperature. The antenna, by the way, is also equipped with the same sensor, because measuring the depth by cable is somehow not innovative.

Figure 2 - Zima-R - responder beacon (with battery pack)
We conducted a general testing of the system on August 3 of this year on the Pichuga River in the Volgograd region, near the place where it flows into the Volgograd reservoir. This is our favorite “polygon”, we know all the pits and profile elements by sight.
In late July and early August, it is usually very hot weather. A heated upper layer appears on water bodies (a thermocline appears), the water begins to bloom, in general, the conditions become difficult. Just in such and need to test equipment. After all, no one is interested in the characteristics obtained by you in the ideally muffled measuring pool, everyone works in real reservoirs.
Photos of the working moment for atmospheric:

Figure 3 - Engineering Director, Chief USBL system designer, R & D Director (from left to right) =)
One antenna can work with 23 responders (although it is difficult for me to imagine such a task, but still). Beacons are separated by code, and work with each of them occurs sequentially.
The following image shows a screenshot of the host (console software):
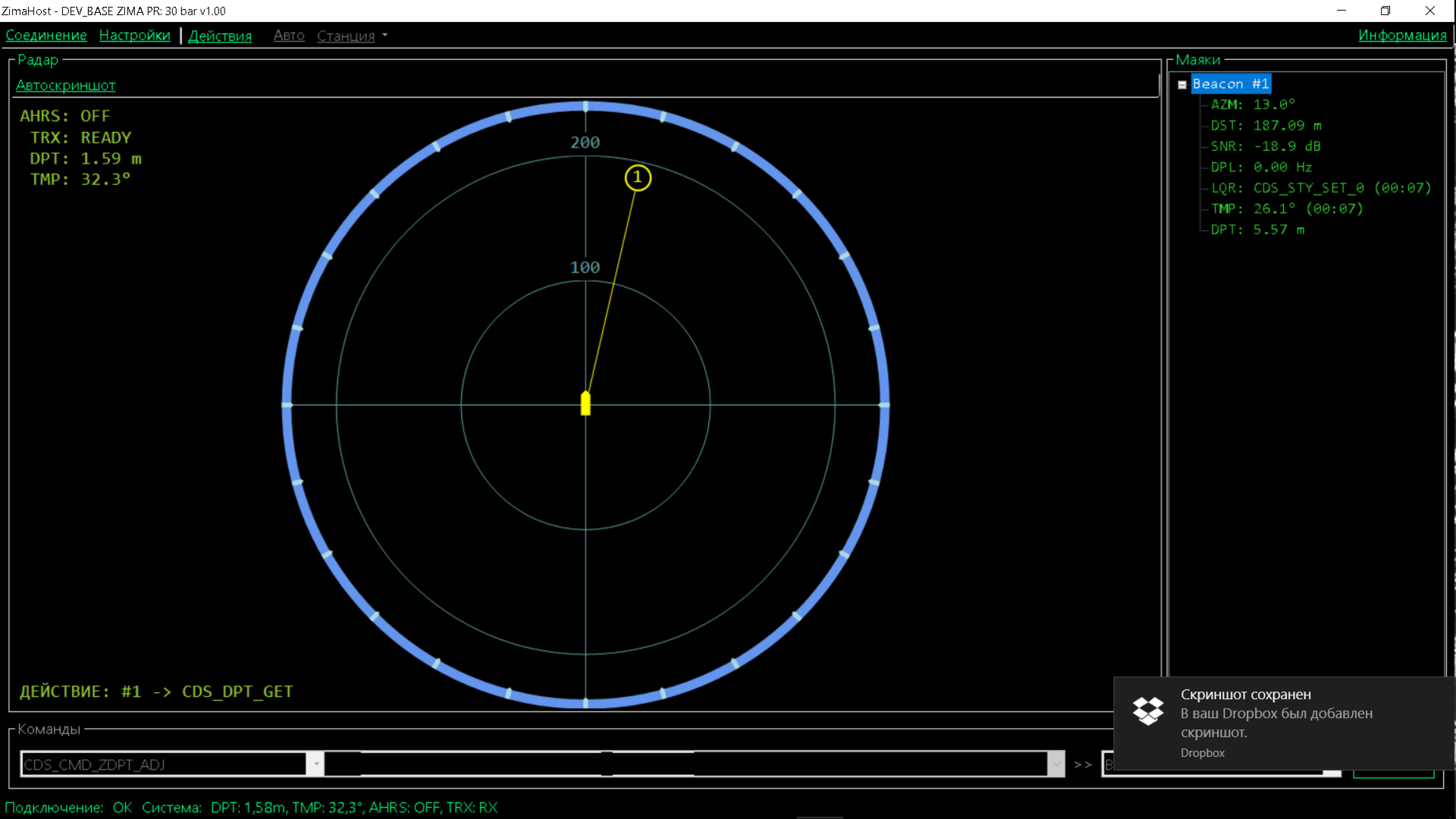
Figure 4 - screenshot of Zima's USBL host
The antenna connects to the PC via a UART-USB adapter. By tradition, we use the NMEA0183-like (open) protocol and all the source codes of the hosts are open to the githab .
Please note: the screenshot shows that the lighthouse is at a depth of 5.5 meters, the water temperature on its sensor is 26.1 ° C (!), And on the antenna itself, which hangs a meter and a half from the surface - 32.3 ° C (CARL!), With The depth of the place in this area is about 15-20 meters.
From external settings, the system needs only salinity (from which the sound speed is determined from the depth and temperature readings) and the maximum distance (it calculates the maximum waiting time for the beacon response). According to our method (for which a patent is expected), the beacon can also determine the distance to the antenna and supports the functions of remotely setting the salinity of water from the base station.
And finally, the most valuable thing we got in this experiment (except for tanning) is a 7-minute video (screen capture) of the host’s work:
ZimaHost - video
I will explain that the lighthouse was fixed motionless - stretched between the anchor and the buoy, and the antenna attached to the rod was hanging from the side of the (rubber) boat. Relativity of motion, so to speak, on the face: the lighthouse makes a rapid lap of honor with a radius of more than 100 meters, which is actually caused by the rotation of the boat and, consequently, the antenna.
We always have a story to tell. If something seemed incomprehensible or poorly disclosed - welcome in the comments. My colleagues and I will sort it out.
PS With these tests, we checked not only the Zima system, but also several other interesting gadgets, which I will try to write about as soon as possible.
Offers:
- President's voice through 700 meters of cyanobacteria
- diving briefcase
- mystery picture (right now!)
Try to guess from the photo what this device is and why it is needed:
Mystery picture 
All Articles