NASAの要請により、 Astrobotic Technologyは、カーネギーメロン大学のロボティクス研究所の専門家とともに、建設にロボットが必要な研究( PDF )を実施しました。

このレポートからキーフラグメントを公開しています。
最初の段階では、着陸地点や道路のレゴリス(月の土)を平らにし、met石やその他の破片から領域をきれいにし、ケーブルやその他のインフラストラクチャ用の溝を掘り、保護堤防を建設し、景観を修復する必要があります。
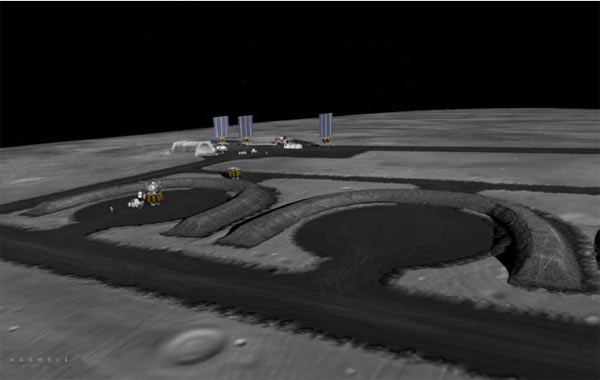
周囲のレゴリスや建造物が融解するのを防ぐために、保護堤防が必要です。これは、多数の着陸やミサイルの発射の過程で避けられません。
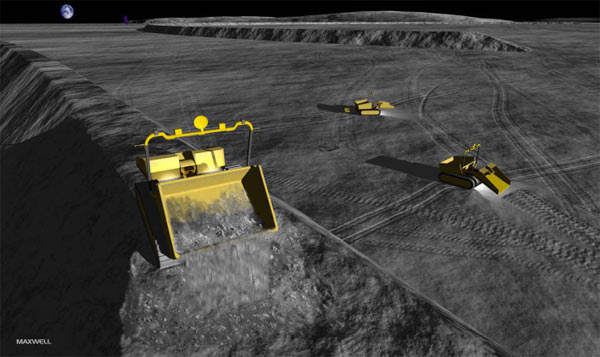
現在、科学者たちは、月の重力で300 kgを超えない重量の掘削機とブルドーザーがどれだけ強力で、どれだけ速く動作できるかを考えています。 予備的な推定によると、彼らは6ヶ月以内に防護堤防を建設することができます。
レゴリスを効果的に移動させるために、いくつかの補完的な技術を適用することが計画されています。1)掘削機の車体は、ロボットの運搬能力を高めます。 2)材料の密度を高めるための圧力下の振動。 3)地元の土壌に集められた石で舗装。
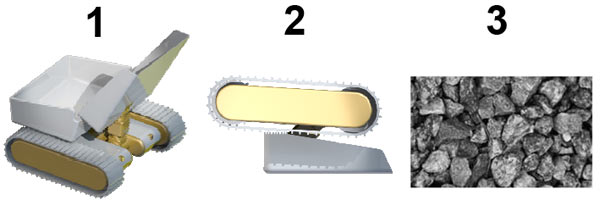
したがって、タンピングおよび舗装ロボットには特別な装置が装備されています。 効果的なロボット設計のために、科学者は月の表面の石のサイズと数に関する詳細情報を必要とします。
最大効率のためのロボットの移動のアルゴリズムは、次のとおりです(再充電のためのエクスコミュニケーションサイクルを使用)。
計算によると、それぞれ重量150 kgのボディを備えた2台の掘削機は、平均30%の身体負荷、15 cm / sの移動速度、および1200トンのレゴリスを移動する必要があると推定した場合、152日(5か月)でマウンドを構築できます。
掘削機は道路の4分の3を道路で過ごすため、移動の速度と精度が重要な指標となります。 彼らは本格的な独自のナビゲーションシステムを持たないと想定されています。 すべての制御は、地球のオペレーターによってリアルタイムで実行されるほか、オペレーターの監督下で部分的に自律的なモードで実行されます。