プロトタイプを作成したエンジニアは、タワーを解体し、線量計、温度センサー、照明器をタンクに取り付けました。 タンクには、インストールされたツールからデータを受信するのと同じ方法で、電気ケーブルで実行されるリモートコントロールが装備されていました。 最初の出撃から、このタンクは放射線偵察に非常に有用であることが判明しました。人々の前で発射することにより、構造物を検査し、清算人に不必要なリスクを与えることなく、放射能汚染のレベルを迅速に測定することができました。 さらに、機械はその小さな寸法のために非常に機動性があり、通過可能であることが判明し、瓦bleの中を最小で最も不快な通路にcい、プラスチックケースはその後の清掃と汚染除去に容易に対応しました。
戦車はおもちゃであり、緊急ステーションで作成および適用された最も成功したロボットの1つでした。

憂鬱なおもちゃ
このようなインターネットミームがあります。一見すると、「これに気づいたら、恐れてそれをすることができます」というキャプション付きの無害な写真です。
上の写真( ソースと著者へのリンク )では、すべてがきれいに見えます。赤い、一見おもちゃの掘削機は子供の頃の夢です。 同じダンプトラック:おもちゃのようなものですが、大きくて深刻です。 それらの間には銀の月面探査機があります。 これはおそらくいくつかの学校やサマーキャンプの遊び場であり、背景のAPCは愛国心が強い教育のためのものです。
しかし、ありません。 写真の非常に「恐ろしい細部」は、トラックの前にある放射線の危険の小さな三角形のサインです。 これは、 事故の清算に参加した機器の小さな博物館の博覧会であり、サインは展示品に触れてはならない理由を雄弁に示しています。
ロボットを使おうとしたとき、彼らはすべて非常に早く失敗し、拒否することを好み、多くの清算人の健康と生命を犠牲にして、素手で緊急ステーションを掃除し始めたという意見があります。 実際、これは非常に物議を醸す声明であり、それらのイベントへの直接の参加者は彼らの間で議論しています。 確かに、消火、屋根の清掃、除染、デブリ除去の作業中、ロボットは人を完全に置き換えることができませんでした。 彼らは、移動時の詰まりやほこりを克服する問題のような深刻な欠点がありました。 しかし、それらの貢献は依然として重要でした-2か月で3番目のパワーユニットの悪名高い屋根から、50トンの粘着性bit青-um青コーティングが除去され、放射性ダストが大量に吸収され、わずかに-グラファイト破片は、原子炉の2番目に危険な物質ですFCM-コンクリートおよび燃料要素の凍結融解物からセラミックまたは溶岩と呼ばれる燃料含有材料。 将来、保全に関しては、破壊された電源ユニットの状態を監視し、シェルター内で作業します。つまり、何百人もの人々の緊急かつ危険な作業が同時に必要でなくなったとき、それはロボットの時代でした。
そうじゃない?
金属の無生物ロボットが放射線に苦しむのは直観に反するようです。 しかし、実際には、そうです。放射性放射線の影響下での電子部品の故障は、同じ放射線が生物を無力化するよりもはるかに速く発生します。 小さな致命的なシェルは、痛みを伴う死が発生する前に、外部および内部から(嚥下または吸入粉塵または中性子誘導により)人を長時間砲撃します。 しかし、バイナリロジックの限界にある電子機器は、最小ではあるが重大な違反で即座に失敗します。
もちろん、長時間の低強度曝露の状況では、ロボットは利益を得るでしょう。 しかし、チェルノブイリ原子力発電所の崩壊した屋根の端で1時間に数百および数千のX線が発生するため、その最も弱いリンクである半導体はすぐに故障します。 半導体は超小型回路であり、それ自体が動作するのとまったく同じ理由で照射を受ける最も単純なトランジスタです。半導体材料内の電荷キャリアの動きは、ロボット本体を貫通する放射性電荷キャリアによって中断されます。
荷電粒子の致命的なシャワーの下で、電子機器への損傷の2つの主要なメカニズムが実現されます。
まず、中性子、陽子、およびアルファ粒子が半導体結晶格子を損傷し、原子を同位体または他の元素に置き換え、局所的な欠陥を引き起こします。 これは、電荷キャリアの移動度、再結合の数、およびトランジスタのpn接合の特性に大きく影響します。 興味深いことに、短期間の高エネルギー照射は、金属硬化にちなんで名付けられた「焼き戻し効果」を引き起こします。格子は、連続的ではあるが強力ではない放射によって引き起こされる劣化と比較してわずかに回復します。 ただし、バイポーラトランジスタの場合、この要因が出力特性の損失の主な理由になります。
第二に、結晶格子内の原子置換に必要なエネルギーよりも低いエネルギーを持つ粒子は、イオン化効果を引き起こします。 これにより、あらゆる種類の電気ノイズ、誘導ノイズ、オプトカプラーの光電効果と伝送エラー、MOSトランジスタの劣化、ソフトウェアの誤動作が発生します。
あらゆる種類の照射とは別に、中性子は結晶内の原子核との上記の相互作用と、材料との衝突による「sh散弾」の二次放射線の生成の両方が可能です。 バイポーラトランジスタは、中性子が結晶格子に侵入すると、その中に「深いトラップ」、つまり異常に大きなバンドギャップ(電荷キャリアを伝導度レベルに移動するためのエネルギー)を作り出すため、最も敏感です。 1平方あたり最大ギガ中性子の磁束密度に耐えます cm、CMOSスキーム-1平方あたりのペタニュートロン。 一般的なケースでは、CMOSチップは最大100グレイの放射線に耐えることができます。 比較のために、人の致死量は約5グレイであり、グレイが質量kgあたりの放射線ジュール数であり、超小型回路と人の質量の差を考えると、これは非常によく見えます。 ロボットが1時間に数千のX線にさらされるまで。 しかし、たとえばサファイア基板上で成長させるなど、半導体結晶の耐放射線性を桁違いに高めることを可能にする技術があります。 電子システムの信頼性を高めるために、回路とロジックの両方(制御ビットの数を増やす)も可能です。
くさび
最初は、ロボットは人間の清算人と並行して働きました。 地上または駅の屋根の両方で、土壌またはルベロイドの床とコンクリートの破片が、グラファイトアセンブリと燃料電池の破片の形で実際の鉱山と混合されていたため、できるだけ早く除染作業を行う必要がありました。
遠隔操作されたプロダクションコンプレックスVNII-100(現在のVNIITransmash)の最初の運用の1つ。 すでに5月18日、政府の委員会は、災害地帯に緊急に連れて行かれたチーフデザイナーAlexander Leonovich Kemurdzhianから、「この国を遠隔操作のルノホッドにしました-屋根の上に置いて掃除してください」と要求しました。 ルノホトはこれらのタスクに適していないという苛立たしい反論に応えて、ケムルジアンはさらにカテゴリー的な回答を受け取りました:「それでは私たちを新しい車にしよう!」
新しい車は非常に短時間で製造されました。 まず、わずか44日でKlin-1が作成されました。 これは、追跡された2台の車両の計算でした:追加の除染装置、シールド、無線制御システムを備えたIMR-1解体エンジニアリングマシンに基づいて作成されたObject 032グレーダー、およびT-72タンクに基づくObject 033制御車両。
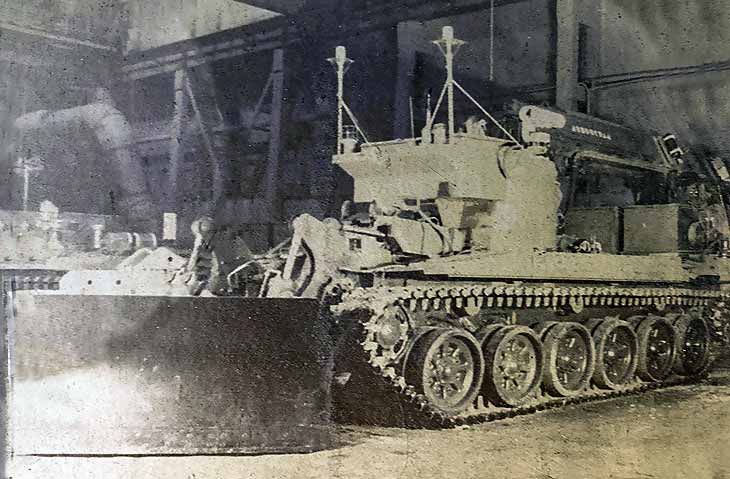
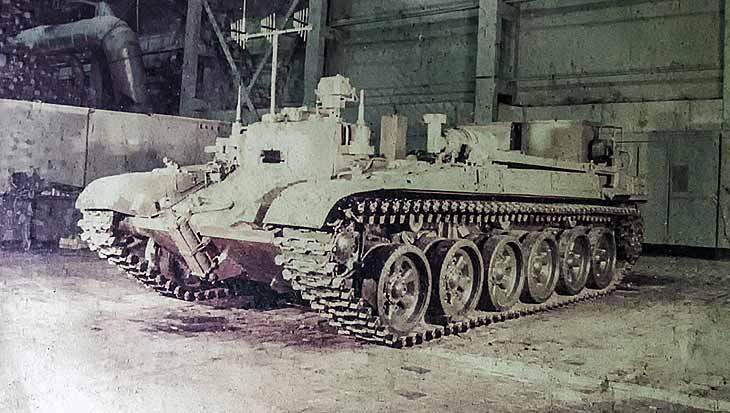
上から下へ:オブジェクト032および033。コントロールカーは人が住んでいて安全な場所にありましたが、ラジコンブルドーザー無効化装置は最も危険なゾーンで働いていました。 複合体全体が、荷車に荷を積み、荷を積み、ほぼ1.5千立方メートルの汚染された土壌を取り除くのを助けました
「ルノホッド」も作られました。 「STR-1」または専用の輸送ロボットとしてよく知られている「Klin-2」は、3番目のパワーユニットの屋根の清掃に関して最も効果的でした。
重さ約1トンの機械はヘリコプターまたはクレーンで屋根に運ばれ、仕事の後、特別なプラットフォームに移動し、除染と充電のために同じ方法で地面に戻りました。 エンジニアはランニングギアに真剣に取り組み、ロボットが熱からできるだけ粘着性のある動きをするようにしました(そしてシャワーによる下水による広い範囲での放射能汚染の浸食を防ぐために、「死体」はヨウ化銀の電荷でそのエリアを長時間回りました)。コーティング。 アスファルトが車輪にくっつかないようにする必要があり、同時に車輪が車輪にしっかりとくっついて、溶けた放射性残骸とともに屋根から取り除かれることが必要でした。 2台のマシンSTR-1がこのタスクに対処し、9月末までに3,000平方メートル以上をクリアしました。 屋根のm。
コンポーネントの放射線安定性は、まず宇宙技術の継承で明らかにされました-宇宙線の作用から保護されたコンポーネントの開発の経験はすでに存在していました。 第二に、障害のない制御方法が使用されました。回路自体では、リレーアセンブリが最大限に使用され、リモート制御は保護された無線チャネルを通過しました。

VNII-100に加えて、RTKのレニングラード中央研究所の機械が事故で働いた。 さまざまなサイズがありましたが、それらは、不適切な取り扱い、停止、および遅さについて重大な批判を受けていました。 この記事の枠組みの中で、説明された出来事の後に生まれた専門家ではないので、私は何かを厳密に断言することを約束しません。 私が発見した情報源から、ケムルジアンの息子は、事故の30周年に関する講演で約1000人について話しています(清算人に1回の許容用量を補充するのと同等の仕事のシフトを指します)。 同時にリリースされたテレビ映画のヴァレリー・スタロドゥモフは、故障したロボットの修理を要求された800人の人々について語っています。 両方のソースを自分で見ることをお勧めします。非常に興味深いものです。
デュサ
瓦の分析とシェルターの建設後に、遠隔操作の自走式ユニットが登場しました。 彼らは他のタスクを解決しました-構造の状態の調査、燃料の探索(最初は、以前の炉心にグラファイトアセンブリと燃料要素が存在しないことを誰も知りませんでした-すべてが溶融してサブリアクタースペースに漏れました)および特に感染した場所。
シェルターの建設後、最初は誰もロボットを使用しませんでした-井戸の掘削と探査に必要なセンサーを備えたプローブの導入により、施設の研究が成功しました。 その後、一次知能が燃料含有材料(FCM)の位置と構造の状態に関する基本データを提供したときに、ロボットが積極的に開発され、職場から新しいデータとテレビ画像を取得するために適用され始めました。
完成したマシンの要件は次のとおりです。 放射線防護に加えて、水分とほこりの保護が必要でした。 シェルターの下には湿度の高い気候が残っており、放射性ダストにより、除染を促進するためにロボットを特別な布で覆う必要がありました。 ノード、シャーシ、サイズの縮小、トロリーの車輪の独立したサスペンションの使用により、信頼性とスループットが確保されました。 リモート制御と信号の受信はケーブルで行われました-無線信号はステーションのコンクリート構造物によって妨害されました。
標準シャーシに基づいて、ロボットは次のタスク用に作成されました。
- 非アクティブ化。 ロボットは部屋に入って、そこにホースとノズルで除染液をスプレーし、壁、天井、床にダストコーティングを塗布しました。
- コンクリートのサンプリング。 ロボットはマニピュレーターを使用して作成されました。マニピュレーターにより、固化した燃料溶融物の壁とサンプルを掘削し、その後の分析のためにサンプルを収集するための構造が作成されました。
- テレビインテリジェンス。 爆発による損傷を評価し、他のDUSAを含む多くの作業を実行するために、強力な光源とテレビカメラが取り付けられた専用の監視マシンが作成されました。
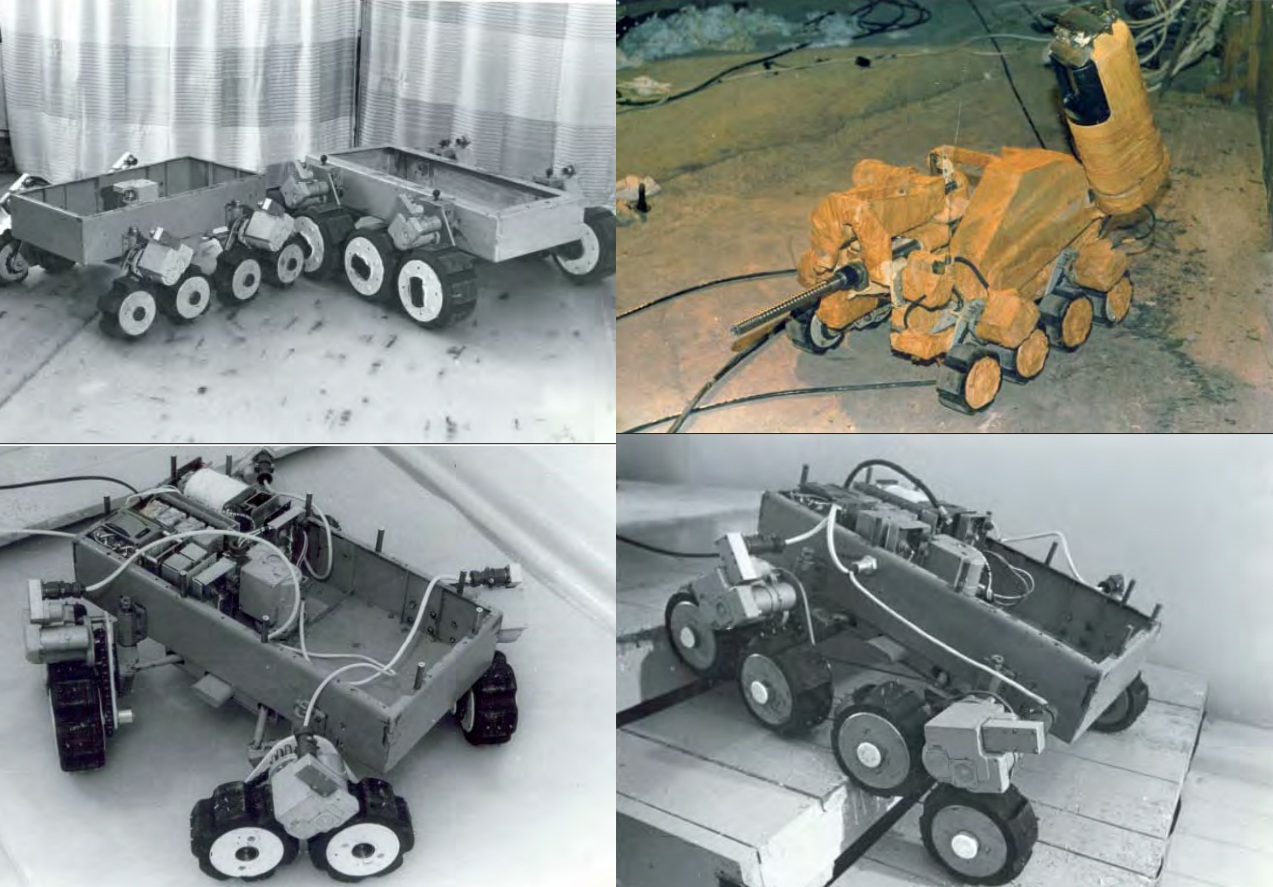
DUSAは試用中です。 断熱布に注意してください。 ここと下の写真ソース
興味深い例は、特別な移動方法を備えたロボットです。 パワーユニットの完全に破壊されたエリアにレールが敷かれ、それに沿ってDUSAが移動しました。
あらゆる種類の機器に通すことができない巨大な破壊で空中を移動し、テレビカメラを備えたロボットは、部屋や構造物の損傷の程度と放射性残骸の位置の両方を非常に詳細にマッピングすることを可能にしました。

完全にエキゾチックなマシンは磁気シンクでした。 これは、磁化可能なクラッディングを備えた部屋の壁と天井での作業用に作成されました。 ロボットの走行ギアには強力なサマリウムコバルト磁石が含まれていたため、この表面に沿って移動するロボットはかなりの重量を支えることができました。 デュアルホイールブロックにより、溶接や非磁性コーティングの破片を克服する際のメッシュの信頼性が向上しました。 1990〜91年 磁束は実験室でテストされ、シェルターで使用されて蒸気分配廊下の部屋に熱センサーを設置しました。 シェルター構造の安定化に備えて、彼は北部のバットレス壁の線量場を測定しました。

これらすべてのデバイスのすべての技術的特性の詳細については、本書に記載されています: A.A. ボロヴォイ、E.P。 ベリホフ。 チェルノブイリの経験 、そして私はそこから言葉ごとの資料を再作成する必要性を感じていません。なぜなら、その仕事は事故のより多くの側面をカバーし、美しく描かれているからです。
福島でよく知られた事故で、ロボットが四半世紀後、地球の反対側でこの道をまだ繰り返さなければならなかったことは注目に値します。 そして、この道も非常に厄介でした。