1つの同志-ヘルメットなし、2番目-手袋なし。
生産施設にはあまり良くないカメラがたくさんありますが、その四分円は最も注意深い祖母ではありません。 より正確には、彼らはそこで均一性に夢中になり、常にインシデントを見るとは限りません。 その後、彼らはゆっくりと電話し、それが危険地帯への電話だった場合、時にはワークショップに電話しても意味がない場合、あなたはすぐに労働者を関連付けることができます。
進歩は、ロボットがすべてを見ることができ、違反するすべての人に情を与えることができるようになりました。 たとえば、SMS、サイレンへの光電流の放電、振動、不快なきしみ、明るい光の閃光、または単に頭に言って思い出させます。
具体的には:
- ヘルメットのない人を認識するのは非常に簡単です。 さえハゲ。 彼らはヘルメットのない男を見た-すぐにオペレーターまたはワークショップの責任者への警告。
- 同じことは、危険な産業のメガネや手袋、ベルト保険(今のところカラビナだけを見てます)、反射ベスト、呼吸用保護具、ヘアキャップ、その他の個人用保護具にも当てはまります。 現在、システムは20種類のPPEを認識するようにトレーニングされています。
- 施設の人を正確に数え、いつ何人いたかを考慮することができます。
- 人が危険ゾーンに入るとアラームを発することができ、このゾーンはマシンのスタートストップ時に設定できます。
などなど。 最も単純な例は、ヘルメットの色による煉瓦職人とコンクリート注ぎ口の色の区別です。 ロボットを助けます。 最終的に、色の差別化のない社会に生きることは、目標を持たないことを意味します。
建設現場で盗む方法
広範囲にわたる窃盗のタイプの1つは、請負業者が施設に100人の労働者を連れてくることを約束し、実際には40〜45人を連れてきたときです。 そして、家は建てられ、建てられています。 それでもやはり、実際に誰も正確に計算することはできません。 有名な冗談のように:熊が建設現場に落ち着いて人々を食べたとしても、誰も気付かないでしょう。 したがって、ゼネコンには旅団を管理する機会はありません。 より正確には、ACSを使用しても、ターミネータcatに関するこの投稿のように、だまされます 。
通常、建設現場にはACSがないか、エントリ専用です。
高度に発達した文明と経験を交換するために旅行し、各職業(より正確には、その役割)が独自のヘルメットの色を持っていることを見ました。 レンガは舗装機によって敷設されます-ヘルメットは青、コンクリートは注ぎ手によって注がれます-それらは緑で、あらゆる種類の賢い人が回ります-それらは黄色なので、「ku」を2回実行する必要があります。 などなど。
そして、これらはすべて、各役割を非常に簡単に検出するために必要です。 敷地内には数百台のかなり安価なカメラがあり、320x200のようなカラーを提供します。 ヘルメットの作業者はリアルタイムで考慮され、特定の建設現場は各カメラに関連付けられています。 その結果、分析の1日の終わりに、これらすべてがゾーンのグラフに縫い込まれます:誰が、どの量で、どのエリアで働いたか。
一般的に、私たちは経験を引き継ぎました。 よく見ると、ニューラルネットワークが大きく前進し、多くの新しい検出器が登場しました。 数年前、彼らはむしろ気まぐれで不安定でしたが、今では最も興味深い状況を非常に正確に捉えることができます。 特に処理速度のために、検出器はしばしば別々のフレームで間違えられ、角度がわずかに変化するビデオストリームでは、優れた実用的な結果が得られます。
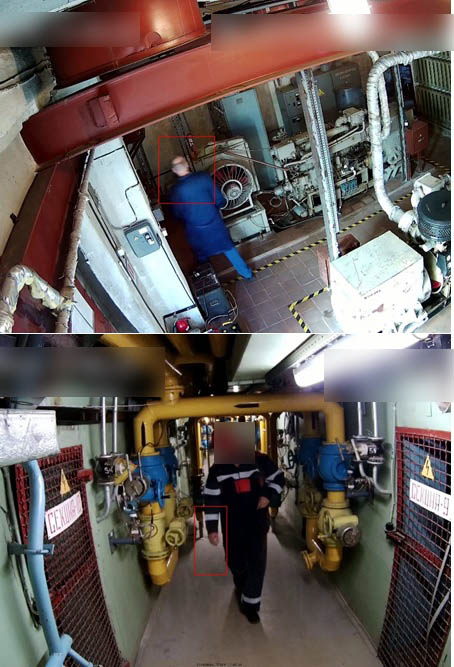
そして、2番目のヘルメットをベルトに固定するとどうなりますか?
最初に、労働者はヘルメットを2つ、そのうちの1つをロバに固定できることを学びました。 すぐに2つの検出器がありました。スケルトンを検索し、このスケルトンの上部に一致するカラースポットを決定し、同期して移動するオブジェクトを検索します。 2番目は、検出が容易であることが判明しました。たとえば、お尻にヘルメットをかぶった人は、このヘルメットの周りをほとんど見ません。 そのためには、頭を回す必要があります。 そして、この動きは非常に簡単に検出されます。 より正確には、そこで何が正確に検出されるかはわかりませんが(ニューラルネットワーク)、彼女は非常に迅速に学習し、違反者を歩行でキャッチします。

私たちは人間のモデルを構築しています。
次に、ヒートマップをリアルタイムで作成し、一日の終わりにレポートします。
したがって、同じ原則-ニューラルネットワークのトレーニング-によって、簡単に検出できます。
- ヘルメット。
- ローブ。
- ベスト。
- ブーツ。
- 突き出た髪。
- 安全カラビナ。
- 人工呼吸器
- 安全メガネ。
- ジャケットを正しく着用してください(電気機器にとって重要です:工場の機械室でシャンダラナットを使用する場合があります)。
- 周辺の大きなツールの取り外し。
合計で、29個の検出器がすでにテストされています。 唯一のポイントは、化学や鉱業などの危険な産業で働いているため、手袋の種類には要件があるということです。 たとえば、ロングとショート。 この場合、それらは異なる色でなければなりません:ビデオカメラのスリーブの下の長さを決定することは非常に困難です。
そして、ここにはしばしばネズミがいました。 個別のラット検出器はありませんが、機械の動作を妨げる物体の検出器があります。

他に何が検出されますか?
化学産業、鉱業、原子力産業、建設現場で検出器をテストしました。 わずかな労力で、以前は同じ祖母が解決していたいくつかの要件を解決できることがわかりました。祖母は、低解像度と低フレームレートで写真に何かを表示しようとしていたのです。 具体的には:
- まだ各従業員の骨格モデルを構築しているため、転倒を判断できます。 秋には、すぐ隣にあるマシンを停止することができます(パイロットの実装にはそのような統合はなく、アラームだけがありました)。 まあ、これはIioTを持っている場合です。
- もちろん、危険な地域にいること。 それは非常に簡単で、非常に正確で、誰にとっても非常に便利です。 冶金企業では、人々は沸騰した鋼のタンクの近くで働いています。鋼を焼き戻すことは有用ですが、時には反対側に立つのは危険です。さまざまなコンポーネントや機器の作業を考えると、これらの危険なゾーンを変更したり、スケジュールを設定したりできます。
- PPEの存在に関する別の非常に有用な検出器は、従業員の責任を監視し、従業員が危険にさらされていないことを確認します。 ここでは、祖母は非常に責任を持って会計の仕事に取り組み、彼女に割り当てられたすべてのPPEを着用します。 称賛に値する!

動作制御は非常に簡単に実装されました-労働者が寝ていたかどうか。 このすべてをテストしている間、ルールは「このゾーンに緑色のヘルメットを着用する必要があります」から「緑色のヘルメットを着用している人物はこの領域に移動する必要があります」に進化しました。 これまでのところ、チップを切りファンをオンにした賢明な人は1人だけでしたが、これも簡単に修正できることが判明しました。
化学者にとって、あらゆる種類のスチームジェット、煙を修正することは非常に重要でした。 石油産業では、パイプの完全性。 火は一般的に標準的な検出器です。 また、閉じたハッチのチェックもあります。

同様に、忘れられたものが検出されます。 数年前にいずれかの駅でそれを実行しましたが、そこでは多数のイベントのためにほとんど意味がありません。 しかし、工場、特に化学工場では、きれいな場所に物事を追跡することは非常に便利です。
興味深いことに、ビデオ分析から、カメラ領域で測定値を読み取ることができます。 これは、生産複合体の危険度が高い同じ化学者にも当てはまります。 センサーの交換などの変更は、プロジェクトの再交渉です。 それは長く、高価で苦痛です。 より正確には、長く、高価で苦痛です。 したがって、物事のインターネットは遅くなります。 今、彼らはメーターでのビデオ監視を望み、データを読み取り、迅速にそれらに応答し、予期せず気付かない機器の故障による損失を減らします。 カウンターからの現在のデータに基づいて、エンタープライズのデジタルダブルを構築し、予測的なメンテナンスと修復を導入できますが、これはまったく別の話です...すでに制御があります:データセットに基づいてプロアクティブな分析を作成しています。 別途、バッテリー交換予測モジュール。
もう一つの驚くべきこと-穀倉や砕石などの材料の貯蔵庫では、3-4の角度から束を取り除き、その端を決定できることが判明しました。 そして、エッジを決定した-最大1%の誤差で穀物または材料の体積を与えます。
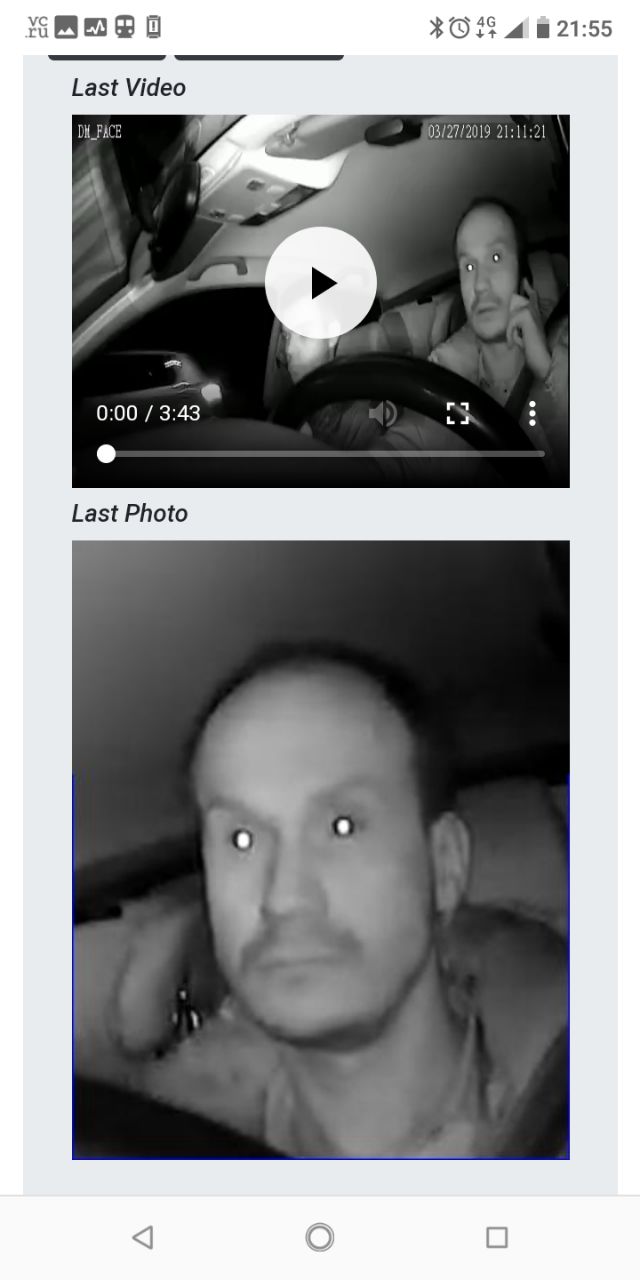
私たちが書いた最後の検出器は、「突く」、あくび、点滅する頻度など、ドライバーの疲労を監視することでした。 これは、目が見えるHDカメラ用です。 ほとんどの場合、制御室に配置されます。 しかし、主な必要性は、BelAZ、KamAZのキャリアです。 車が転倒することもあるので、今では、ドライバーを制御するために、私のものを思い付く必要があります。 ロボットは祖母よりも優れています。
車について。 たとえば、疲労制御のテーマは、BelAZ、KamAZ、および他のMAZだけでなく、自動車メーカーによって積極的に使用されています。 すでに普通の普通の車では、メーカーはドライバーの疲労に関する警告システムを統合していますが、これまでのところ、マーキングに対する車の位置とハンドルの性質のみを分析するかなり簡単なソリューションがあります。 さらに進んで、はるかに複雑な人間の行動を検出しました。
ドライバー監視のもう1つのケースは、カーシェアリングマシンの使用時の異常な動作の検出です。 彼らはハンズフリー、食事、飲み物、喫煙などなくして電話で話すことはできません。
ああ、そして最後。 ここ数年、カメラ間でオブジェクトを追跡することができました。たとえば、何かが盗まれた場合、どのように、どのように確認する必要があります。 オブジェクトに100台のカメラがある場合、マテリアルを上げることで苦しめられます。 そして、システムは、オーシャンと彼の友人についてのアクション満載のスリラーを自動的に形成します。
2年前のシステムとの違いは何ですか? 今では、「オレンジ色のジャケットを着たハゲ男が1台のカメラから出てきてすぐに別のカメラに入った」という認識だけでなく、建物の数学モデルが構築され、そこからオブジェクトの動きに関する仮説が立てられます。 つまり、これはすべて、オーバーラップのあるエリアや死角のある場所、時には広範囲な場所で機能し始めました。 顔ごとに年齢を判断するライブラリがあるため、検出器は今でははるかに優れています。 HDカメラでは、「30歳の男性と35歳の女性」などの向きを設定できます。
それで、おそらく5〜7年後に私たちは生産を終了し、あなたの家に行きます。 安全のため。 それは市民の利益です!
参照資料
- 有毒薬物熊について:祖母が探知機よりも安かった場合の例。
- 猫ターミネーターと顔認識について。 壮大なケース。
- カートを監督者からどのように区別したかについて。
- より多くの異なる検出器。
- 私のメールはtpavlova@croc.ruです