
小枝の束は、1本の小枝よりも壊れにくいです。 さまざまなバリエーションのこの比phorは、何かだけに対処することはグループよりもはるかに難しいことを示しています。 そして、多くの点でこれは真実ですが、それほど単純ではありません。 野生では、動物、肉食動物、草食動物は、しばしばグループ、群れ、学校などに集まります。 しかし、比phor的なロッドとは異なり、グループのすべてのメンバーは同等ではありません。リーダーとフォロワーがいます。熱心に前進する人、中心に潜む人、尾に織る人がいます。 そして、ここで疑問が生じます-特に誰かのお気に入りの食べ物である動物の種が考慮される場合、リーダーシップの価格と利益は何ですか?
今日、私たちは、科学者が捕食魚と人工魚群で一連の異常な実験を行った研究に精通します。これにより、捕食者と捕食者の関係のプリズムの下のグループの位置の正と負の側面を決定することができました。 キューでより致命的なものは何ですか、リーダーシップの賛否両論は何ですか、魚の群れは捕食者の目を通してどのように見えますか? これらすべての質問に対する答えは、科学者のレポートで見つかります。 行こう
研究の基礎
先ほど言ったように、地球上の多くの生物種はグループにまとめられています。 野生の生活のすべての困難に対処するのは簡単です。ペンギンは密集したグループに集まり、体の温かさでお互いを暖めることでひどい寒さを乗り切ることができます。 ライオンのプライドが一緒に狩り、獲物を追跡、取り囲み、傍受し、成功の可能性を高めます。 小さな鳥の群れの混oticとした(ランダムではない)動きは、猛禽類がそれらを狩るなどを大きく妨げます。
ひどい寒さ、風、そして何ヶ月もの夜に立ち向かう皇帝ペンギン。
繰り返しますが、多くのグループには、常に意識的ではありませんが、他のすべてをリードする1人の個人がいます。 自己組織化されたグループ(鳥または魚)では、そのような個人はグループの先頭、つまり正面にいます。 この状況は、リーダーに環境に関する情報(食物の入手可能性、障壁、危険など)を受け取る最初の機会を与えます。したがって、リーダーはグループ全体の行動に影響を与える決定を行うことができます。 指導者個人の主な利点は、指導者とグループの生活を同時に維持するために必要な行動を実行する、それによって導かれる集団の質量に正確にあります。
群れ/学校の正面はより頻繁に危険に直面する可能性があり、捕食者が狩猟中に主要な個人をナビゲートするのが簡単であるため、科学者は常に動物の群れの移動における捕食者をリーダーシップの主な欠点と呼んでいます。 ただし、この理論を確認または反証するために、これまでに実験は行われていません。
自己組織化されたムクドリの群れ:信じられないほどの美しさの光景。
リーダーシップの理論を裏付ける観察結果は非常に曖昧です。 研究者は、動物の自己組織化グループのリーダーとフォロワーの決定は、グループ全体の自己組織化のために正確に発生しますが、リーダーシップとフォロー(リーダーの後)は他の要因に関連していることに注意します。 多くの場合、リーダーシップへの傾向は、より多くの情報またはより多くのニーズによって決定されることに関連しています。 つまり、グループの頭の位置は、多くの場合、より大きく、より空腹で、リスクが少なく、社会的な個人によって占められます。 同様の特性は、個人にとって危険です。 言い換えれば、どちらがより危険であるかを評価することは困難です-グループのリーダーシップまたはグループのちょうど前部。
また、問題が発生します。リーダーになることが非常に危険な場合は、グループから脱退する必要があるかもしれません。 おそらく孤独は、パックに住むよりも安全でしょう。 最初と2番目のバージョンの両方で、捕食者に関連する利点と欠点があります。 ただし、グループを去るには、個人は優先順位を社会的から集中的(すなわち、生存)に完全に変更する必要があります。 一方、グループのリーダーであることが、自分で泳ぐよりもまだ少し安全であれば、社会的行動が優先事項になります。
私たちがすでに理解しているように、多くの質問、いくつかの観察。 したがって、科学者はすべてをその場所に置き、捕食者によって攻撃された動物のグループの社会的領域で何がどのように機能するかを理解することにしました。 このために、特別な人工仮想マイニングシステムが開発されました。 このグループの各ユニットの行動を完全に制御できるため、科学者はグループから分離されたユニットだけでなく、リーダーやフォロワーに対する捕食者の行動を理解することができました。
研究準備
Carey川(イングランド)で捕獲された捕食性の捕食魚は、実験の生きた参加者として行動しました。 実験室では、流動再循環システムと温度15〜16°Cのガラス水槽(40x70x35 cm)に配置されました。 各水槽には約40人が居住し、1日2回定期的に餌を与えられました(テストが行われた日を除く)。
水槽の正面壁にあるエージェントモデリングの投影*が獲物として使用され、テストを完全に観察できるようになりました。 科学者は、行動モデルの基礎として、Netlogo 5.0.5を通じて変更された既存のものを使用しました。
エージェントモデリング*は、分散エージェントの動作と、そのような動作がシステム全体の動作に及ぼす影響を調査するシミュレーション方法です。人工鉱業グループは、1人のリーダー、4人のフォロワー、2つの非社会的ユニットで構成されていました。 リーダーとフォロワーは、反社会的ユニットの行動に反応しないようにプログラムされました。
各スレーブユニットは、リーダーと他のスレーブとの距離が6.5 cmになるように結び付けられていましたが、スレーブユニットが近くになければリーダーとしても機能します。 したがって、グループの動きは常に頭から尻尾まででした。つまり、常にリーダーと1-2の従動ユニットがありました。
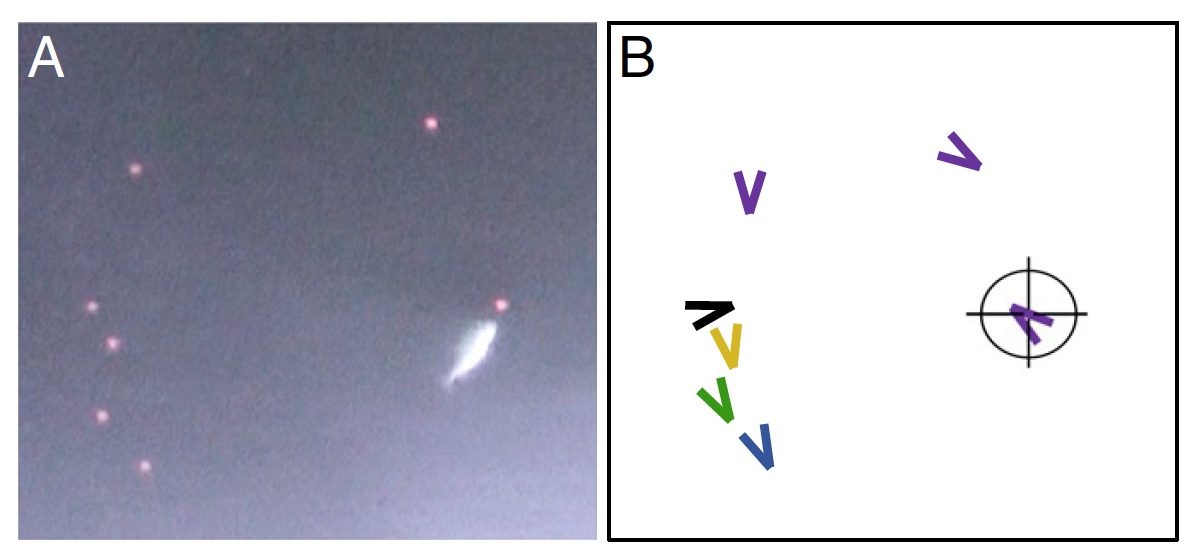
イメージNo. 1: A-スティックバックは、水槽の壁の設計されたポイント(人工生産)を攻撃します。 In-人工抽出の動きの位置と軌跡(色はユニットのタイプを決定します)。
画像1Bのユニットタイプの色分布に関する簡単な説明:
- バイオレット-孤立した(社会的な)ユニット(しきい値距離内に他のユニットが存在しない);
- 黒-間違った方向(しきい値距離内に隣接するユニットがありますが、黒のユニットと一致しないパスに沿って移動します);
- 青-先頭(先頭)ユニット。
- 緑-グループの中央にあるユニット。
- 黄色はグループの末尾の単位です。
生産ユニットのタイプを規制する行動ルールが適用され、システム全体の異なる行動を取得することが可能になりました。 したがって、捕食者(魚)は、リーダー、駆動または非社会的なユニットの間で選択する機会がありました。 すべてのユニットの初期位置はランダム化されました。 科学者によれば、すべてのユニットは赤い点(2.5 mm)の形で画面に表示され、ミジンコ(浮遊性甲殻類)を連想させます。
 ミジンコ
ミジンコ
システムが完全に準備できたら、1匹の魚をテスト水槽に入れました(思い出すように、空腹です)。 ユニットへの攻撃の事実は、魚の方向への加速、口の開き、ユニットが投影されたスクリーンとの接触でした。
実験結果
201匹の魚のうち合計133匹が、テスト実行中に少なくとも1回、それぞれ10分間人工餌を攻撃しました。 仮想の獲物を食べることができないことに関連する捕食者の行動の変化を最小限にするために、科学者はさらなる計算でテストごとに1つの攻撃のみを考慮しました。
捕食者問題において決定的な決定的な仮想被食者行動を決定するために、科学者は、さまざまな説明変数に応じて捕食魚がどの被食者を攻撃するかを予測する8つの二項一般化線形モデルを比較しました。
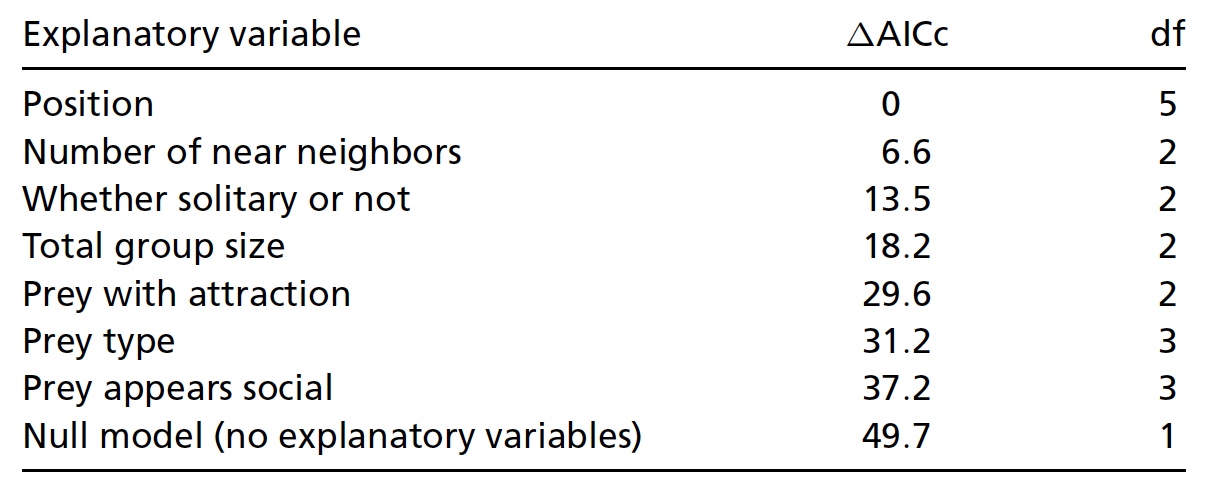
上記は説明変数の表、つまり、計算で1つまたは別の変数を使用するモデルの表です:位置、近傍の数、単位の孤独かどうか(孤独かどうか)、合計グループサイズ(合計祈りの大きさ)、魅力のある獲物、獲物の種類、獲物は社会的でヌルモデル/説明変数なし
AICc * -赤池情報量基準、小さなサンプルサイズ用に変更。分析は、少なくともいくつかの変数の存在は、それらの不在よりも自然に優れていることを示しました。 獲物をタイプ(フォロワー、リーダー、反社会的)に分離するモデルは、リーダーと隠者が捕食者によって攻撃される頻度が高いことを示しました。 しかし、リーダーとフォロワーが同じカテゴリーに属するモデルは、実際の観察による確認を受けませんでした。つまり、捕食者からのリスクは、グループ内のユニットのタイプ(リーダー、グループの中央、または尾)によって異なります。
最も示唆的なのは、攻撃中の被害者の行動(モデルユニット)を考慮に入れたモデルであり、種類ごとの獲物の分離です。 言い換えると、各ユニットは元々、特定の行動、つまりタイプ(正面にいる、リーダーに従う、またはグループ全体から離れる)にプログラムされていました。 ただし、テスト中の実際の動作自体ははるかに重要でした。
グループ数の増加により、捕食者攻撃のリスクが減少しました。 さらに、数だけでなく、他のユニットに対する個々のユニットの位置も考慮に入れたモデルは、より可能性が高いことが判明しました。 また、グループのサイズではなく、その密度、つまり個々のユニット間の距離ではなく、重要な役割が果たされるモデルもありました。
科学者は、考えられるすべてのモデルを分析した後、どんなに奇妙に聞こえても、考えられるすべての要因を考慮する必要があるという結論に達しました。 数や捕食者と被食者の間の距離ではなく、行動変数に最も注意を払う必要があります。
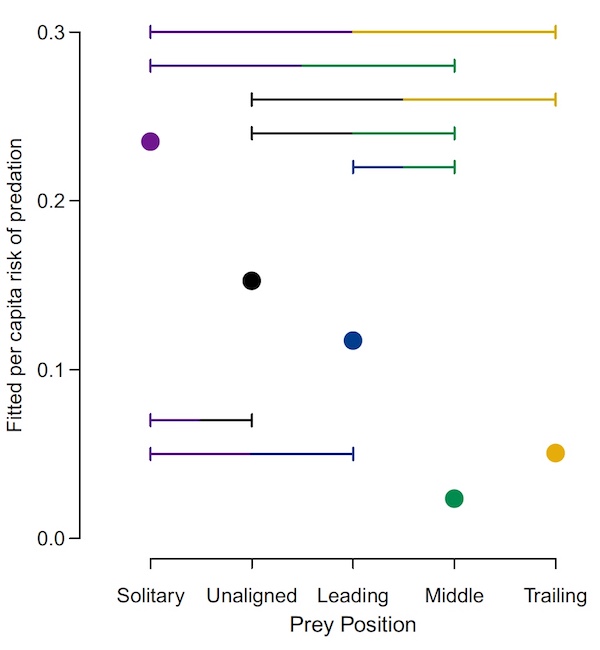
画像No.2:獲物の位置に応じた攻撃のリスク(紫色-非社会的;黒-グループ内、ただし同じ方向ではない;青-リーダー(リーダー);緑-グループの中央、黄色-グループの尾部)
攻撃される最大のリスクは、非社会的ユニットでした(上のグラフの紫色の円)。 この指標は、リーダーシップはグループからの完全な隔離よりも安全であるという理論を裏付けています。 グループ全体のように移動しないユニットでさえ、社会的よりも安全です。
理想的なグループを考えると、すべてのユニットが一方向に整列している場合、科学者はリスクの程度の明確な段階的変化(大きいものから小さいものへ)を見ました-グループの始め、尾部、および中央で。 科学者は、グループの中央部と尾部のユニットのリスクの程度は大きく異なると予想していましたが、そうではありませんでした。
尻尾にいることは、グループの頭にいるよりも危険ではないと想定することができます。 多くのホラー映画で、モンスターがしばしば尾から人々のグループを攻撃することは何もありません。 しかし、これらの研究は、最初と比べて有意に低いとはいえ、尾とグループの中央の両方で、食べるリスクはほぼ同じであることを示唆しています。
使用された獲物シミュレーションでは、ユニットの行動が確率的であり、ユニットがグループを去るか、グループに参加したときに時間とともに変化したことに注意する価値があります。 したがって、捕食者攻撃のシミュレーション中に、多くの獲物のバリエーションがありました。 これらすべての変動を説明するために、科学者はランダムな捕食者をシミュレートする特別なテストを開発し、各シミュレーション中に等しい確率で獲物を選択しました。 興味深いことに、このランダム化を考えると、グループ内外の位置に基づいた生産モデルは、他と比較して最も受け入れられることが判明しました。
次に、科学者は、捕食者から被害者を選択するメカニズムを理解する必要がありました。 これを行うために、攻撃のリスクは、攻撃のターゲットまでの距離、軌道(ベアリング<90の生産全体から)および前方(ベアリング> 90の生産全体から)で最も近い隣接生産ユニットまでの軌道*の違いに基づいて計算されました。
方位*は、観測者の子午線の北部と観測点からオブジェクトまでの方向との間の水平角です。すべての変数の中で、攻撃のリスクを予測する際の最大の説明力は、正確に獲物の前の最も近いユニットまでの距離(攻撃のターゲット)であり、その後に、獲物の後ろの最も近いユニットまでの距離の要因と、前の最も近いユニットとの移動方向の違いが続きました。
特定の獲物に対する捕食者の攻撃のいくつかの変種の観察のビデオ。
ユニットがグループの中央にあり、前後の隣接ユニットとの距離が非常に小さく、すべてのユニットの移動方向が同じであれば、捕食者攻撃の被害者になるリスクは最小限でした。 隣接するユニットの配置は、攻撃のリスクに大きな影響を与えませんでした。 つまり、2つの生産単位の間にあれば、食べられない可能性が高まります。
その結果、モデリングデータによると、捕食者は偶然ではなく特定の獲物を攻撃しますが、獲物のリスクはグループ内の位置、動きの方向の違い、隣人の方位(わずかな影響要因)によるものです。
さらに、捕食者は攻撃対象を選択できます。つまり、すぐに攻撃しないでください。 被害者の選択は、現時点でグループに関する利用可能な情報だけでなく、将来の構成の変更の可能性も考慮する必要があります。 つまり、捕食者は、グループまたは個々の獲物の行動パターンに基づいて、攻撃する適切な瞬間を待つことができます。
この理論をテストするために、科学者は生きている捕食者と人工被食者を含むシミュレーションの結果を分析しました。 獲物行動のどのパターンが最も頻繁に捕食者によって攻撃に使用されたか、またはランダムな順序で攻撃されたかを計算する必要がありました。
データ(19,000以上のサンプル)の分析により、捕食者は、周囲にさらに1つのユニットがある場合、攻撃の特定の瞬間を選択することが示されました。
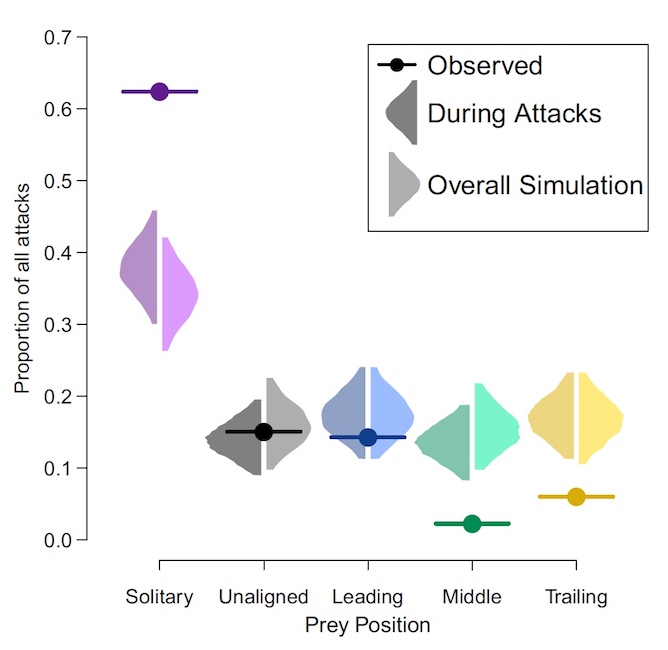
イメージNo. 3
上のグラフは、獲物の位置に応じた攻撃の割合を示しています。 円は、実験観測中の攻撃の指標です。 グラフ上の色付きの領域は、各獲物位置の予想される攻撃の割合の分布を示しています:観測された攻撃(暗い領域)または選択されたシミュレーションサンプル(明るい領域)と同じ場合に、捕食者が被害者をランダムに攻撃した場合。
観測された攻撃(円)が色付きの領域の外側にある場合、特定の獲物を捕食者に向けることは選択的であり、偶然ではありません。
この研究のニュアンスをさらに詳しく知りたい場合は、科学者のレポートと追加資料を参照することを強くお勧めします。
エピローグ
この研究は、グループの先頭にいる個人が捕食者による攻撃のリスクが高いと主張する理論の最初の真の証拠です。 この場合、リーダーが率いる個人から十分に近い距離にリーダーがいる場合、リスクを減らすことができます。 科学者はまた、グループに所属することは(指導的立場であっても)個々に移動するよりもはるかに安全であることを確認しました。
したがって、グループのリーダーは、目標の達成(たとえば、食べ物の検索)だけでなく、グループの整合性、つまりその構築を監視する必要があります。これは、彼が導く個人だけでなく、彼自身の生存にとっても非常に重要です。 将来的には、研究者は、上記の目標を達成するためにグループリーダーが取るべき行動を正確に見つけようとしています。
もちろん、この作品は啓示と呼ぶことはできませんが、以前は実際にテストされていない理論にすぎないものを確認する実際のデータを提供しました。 リーダーになるということは、グループ全体が何を必要としているかを知ることです。 リーダーになることは、同時に収益性と危険性があります。最初に食べ物に到達することも、最初になることもできます。 野生でのリーダーシップに伴うリスクにもかかわらず、動物はフォロワーとリーダーの両方がいるグループを形成し続けます。 おそらく、いくつかの遺伝的レベルで、彼らは、たとえあなたがリーダーであっても、グループでの生存の可能性が個別よりも大きいことを理解しています。
金曜日のオフトップ:
野生のグループの形成。
野生のグループの形成。
オフトップ2.0:
記事とは関係のない短い漫画(3番目の計画の役割での魚の存在を除く)。
記事とは関係のない短い漫画(3番目の計画の役割での魚の存在を除く)。
ご清聴ありがとうございました。好奇心を保ち、皆さん、素晴らしい週末をお過ごしください。 :)
ご滞在いただきありがとうございます。 私たちの記事が好きですか? より興味深い資料を見たいですか? 注文するか、友人に推薦することで、私たちをサポートします。私たちがあなたのために発明したエントリーレベルのサーバーのユニークなアナログのHabrユーザーのために30%の割引: VPS(KVM)E5-2650 v4(6コア)についての真実20ドルまたはサーバーを分割する方法? (オプションはRAID1およびRAID10、最大24コア、最大40GB DDR4で利用可能です)。
VPS(KVM)E5-2650 v4(6コア)10GB DDR4 240GB SSD 1Gbpsまで 6か月の期間を支払う場合、無料で夏まで、 ここで注文できます 。
Dell R730xdは2倍安いですか? オランダと米国で249ドルからIntel Dodeca-Core Xeon E5-2650v4 128GB DDR4 6x480GB SSD 1Gbps 100 TVを2台持っているだけです! インフラストラクチャビルの構築方法について読んでください。 クラスRは、1米ドルで9,000ユーロのDell R730xd E5-2650 v4サーバーを使用していますか?