Habréでは、国内の開発-FEDORロボット(Fedor)について何度か言及しました。 メディアはこのロボットについても書いており、ほとんどの場合、さまざまな機能(たとえば、両手での射撃)と、ロボットがまもなくISSに行くという事実に言及しています。 今日の「背景」では、彼がどのように作られたのか、彼が本当にできること、そして彼の見通しについて語っています。
いつ、誰がヒョードルを作ったのですか?
プロジェクトの正式名称はFEDOR(最終実験デモンストレーションオブジェクトリサーチ)です。 最初の作業タイトルはアバターでした。 プロジェクトの名前は、ドミトリーロゴジンによって与えられました。
このプロジェクトは、ロシアの緊急事態省が委託したAndroid Technology NGOと連携して、Advanced Research Foundationによって実施されています。 目標は、救助活動中に擬人化されたロボット複合体の複合制御システムを開発することです。
NGOはロボット工学に新しいものではありません 。 この組織は13年間存在し、その活動中に、NGOは民間企業および国家機関向けに50台のロボットをリリースしました。 顧客とパートナーには、産業貿易省、FSB、緊急事態省、保健省、宇宙飛行士訓練センターなどがあります。 ガガリーナ、ロシア原子力共同体、ロケットおよび宇宙公社(RKK)エネルジアなど。 NGOは、個人顧客と公共顧客の両方からお金を受け取ります。 年間予算は約5億ルーブルです。
システムの作成に関する作業は2014年に開始され、現在に至っています。 ヒョードルに関する最初の情報公開は2016年に始まりました。
物理的には、開発センターはマグニトゴルスク、アルファセンタービジネスセンター、および同じ都市の複数の研究所にあります。
ヒョードルはゼロから作成されますか?
そうでもない。 基本は、Roscosmosが委託したNPO Android Techniqueが作成したロボットデバイスの以前のモデルです。 これらはSAR-400およびSAR-401モデルです。 ロスコスモスには、ISSで作業する宇宙飛行士のための電子機械的アシスタントが必要でした。
開発は2段階で行われます。 最初は実験的な設計作業です。 この段階で、開発者はソフトウェアをテストするための5つの技術レイアウトを作成しました。
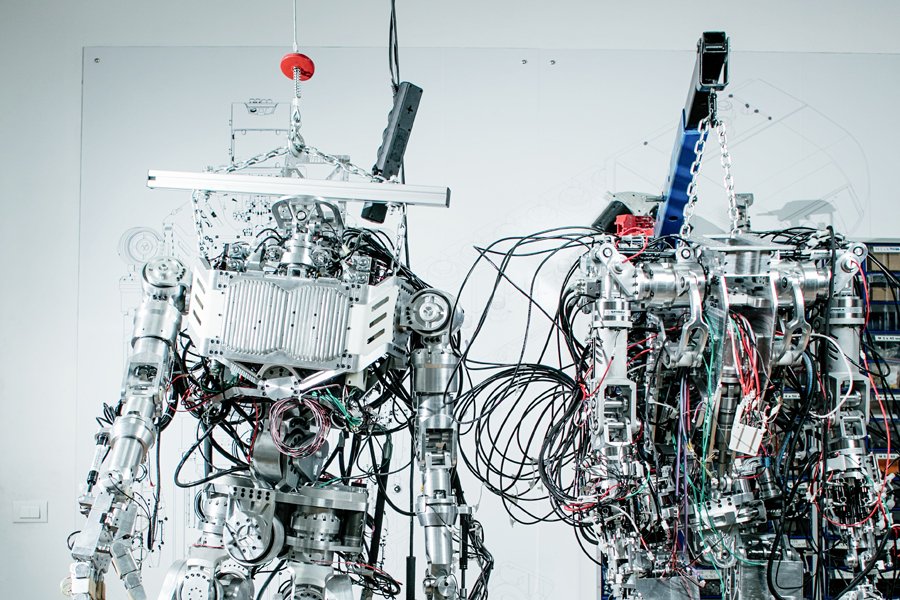
写真:RBC
2つのレイアウトは本格的なロボットのように見え、他の3つのレイアウトにはいくつかの要素が欠けていました。たとえば、上部または下部です。 当初、専門家は油圧駆動を使用したいと考えていましたが、価格が高すぎ、そのようなシステムの信頼性が低いことが判明しました。 そのため、電気駆動装置を支持して油圧装置は放棄されました。
プロジェクトはいくらですか?
開発者は約3億ルーブルを費やしましたが、プロジェクトの完了にはまだ程遠いため、これは全額ではありません。
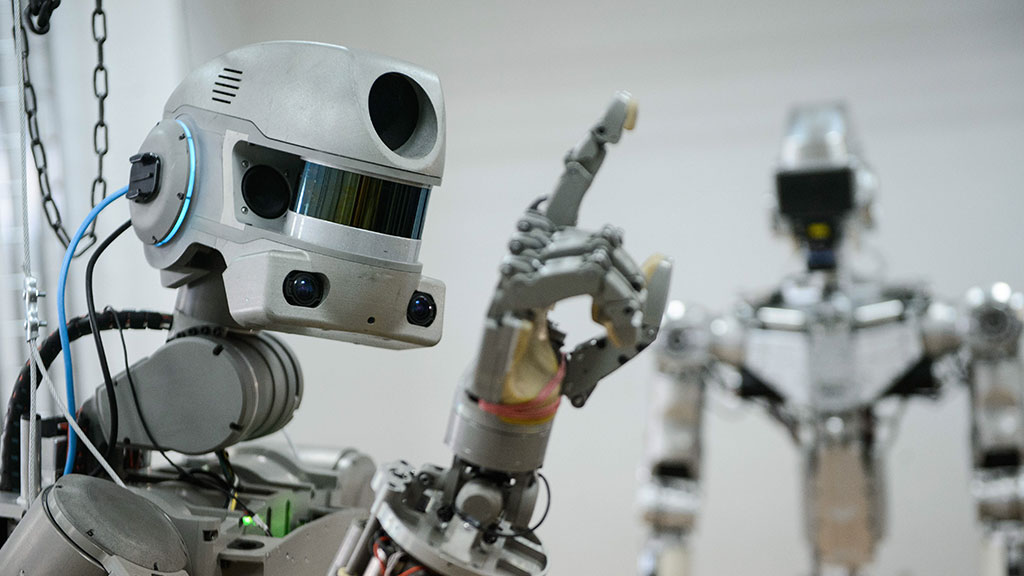
ロボットの特徴は何ですか?
彼の身長は180cm、体重は約160kgです。 電力-13.5 kW(20馬力)。
ロボットは15,000個の部品で構成されています。
ソフトウェアは、Linuxに基づいてサンクトペテルブルクで開発されたリアルタイムオペレーティングシステムです。
スタンドアロンモードで動作-1時間、通常のコンセントから充電されます。
ロボット-完全に国内開発?
すべてのロボットプロトタイプの国内および外国のコンポーネントの割合に関する正確な情報はありません。 それでも、そのうちの1つは部品の50%がロシアで製造され、残りは日本、ドイツ、アメリカ、スイス、その他の国で特別注文で組み立てられることが知られています。 ロボット用のソフトウェアはLinuxに基づいて開発されているため、ロシア語のみと呼ぶことも困難です。

写真:RBC
ロボットの電子部品の90%は、サンクトペテルブルクのAbris-TechnologyやSilicium企業など、さまざまな組織によってロシアで生産されています。
ヒョードルはオペレーターによって管理されていますか?
最初のプロトタイプは、オペレーターの制御下でのみ機能しました。 現在、ヒョードルはすでに自律的に行動することを学んでおり、これは自己学習システムです。 ロボットは、さまざまなセンサーから環境とそのパラメーターに関する情報を受け取ります。
- 2台のカメラ。
- サーマルイメージャー;
- マイク;
- GPSおよびGLONASS;
- 15の距離測定レーザー。
- あなたの体の位置を決定するための特別なシステム。
ヒョードルは、典型的なオブジェクトとツールを識別し、障害を区別できます。 彼はこれらすべてを環境の3次元図に入れます。 現時点では、彼はドアを開ける方法、ドリルを使用する方法、ピストルを撃つ方法、車とATVをオフラインで運転する方法を知っています。
将来的には、開発者はタスクを個別に決定するようにロボットを訓練する予定です。 たとえば、ヒョードルが地震で被害者を見つけ、その足がコンクリートブロックで押しつぶされた場合、彼は人を解放するために「理解」するので、ブロックを取り外して被害者を安全な場所に連れて行く必要があります。

写真:RBC
さらに、ロボットはコピーモードで動作できます。 この場合、オペレーターはヒョードルの構造的特徴を繰り返す外骨格を装着します。 さて、ロボットはオペレーターの動きをコピーします。 あなたが理解できる限り、両手射撃はオペレーターの制御下で行われました。
オペレーターはロボットから数千キロ離れた場所にいる可能性があり、テレメトリは衛星経由で送信されます。 オペレータは、スーパバイザモードでもロボットを制御できます-外骨格の助けを借りて動きを設定せずに、画面上で何をする必要があるかを示します。
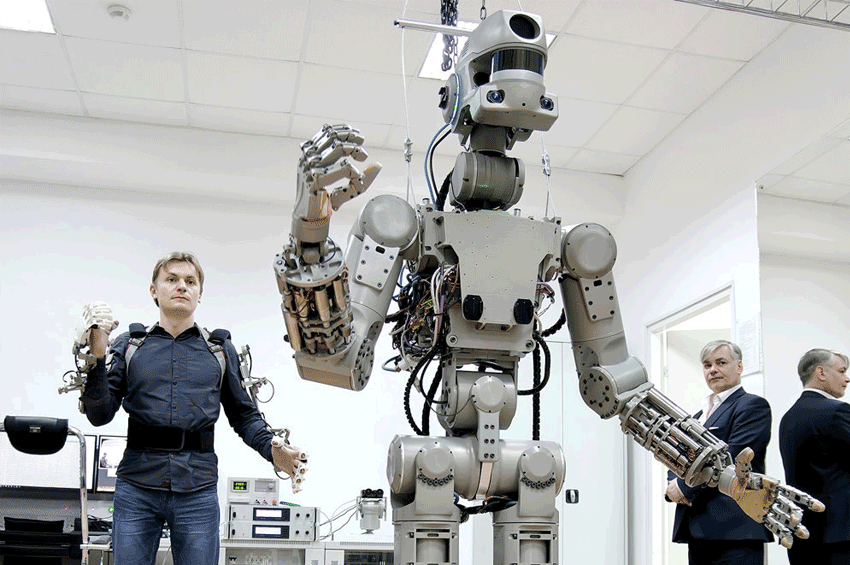
写真:robo-sapiens.ru
開発者は、オペレーターは医師、軍隊、ライフガード、またはその他の専門家になることができると言います。 そのため、必要に応じて、ロボットは、放射線に感染した埋立地の調査から建設工事の実施まで、さまざまな機能を実行できます。
開発者によると、 ヒョードルの電子機械的基盤は、 DARPAが開発中のATLASに決して劣っていません 。 しかし、ソフトウェアパッケージはそれほど完璧ではありません。 特に、何千人ものプログラマーがATLASを使用しており、プロジェクトに直接関係するプログラマーのみがFedorを使用しているためです。
なぜロボットは射撃するように教えられたのですか?
開発者は、これはシステムの機能を実証するためだけに行われていると主張しています。 照準、ターゲットの選択、リターンを減らす能力などの問題を解決するため。 専門的なアルゴリズムを開発する必要があり、これは長年の作業ではないにしても、数ヶ月です。 そして、ヒョードルは軍事開発ではありません。
Fedorをどこで使用する予定ですか?
そのアプリケーションの主な範囲は命を救うことです。 彼は、化学物質や放射線汚染のある地域や建物で働きます。 現在、Advanced Research FoundationとRosatomは、放射性廃棄物を分別できるプロトタイプを作成しています。
ヒョードルは自分の手をよく監視しているので、職場の人々を助けることができます。 おそらく彼は他のロボットの組み立てを手伝うように教えられるでしょう。
それは、サッパービジネス、医学の分野で優れている可能性があります(現在、ロボットは注射を行い、タイヤを装着することができます)。 残念ながら、多かれ少なかれ微妙な作業は、オペレーターが制御されている場合にのみ実行されます。
2021年、ヒョードルは連邦宇宙船の飛行で派遣されます。 確かに、このために、開発者はロケットおよび宇宙産業のすべての要件を満たすシステムの新しいバージョンを作成します。 より信頼性の高い電子機器、大容量バッテリー、小型サイズ-これらはすべて2021年までに実現する必要があり、残り時間はほとんどありません。