
ロボット工学の世界では、ソフトウェアフレームワークが長年にわたって開発されており、ロボットシステムであるRobot Operating System(ROS)のプロトタイプをすばやく作成できるようになりました。 Sberbank Robotics Laboratoryでは、私たち自身のプロジェクトの開発に積極的に使用しています。 いくつかの経験を蓄積し、ロシアではまだROSに関する実用的な会議が一度も行われていないことに気付き、私たちはそれを組織し、知識を共有し、同時にロボット工学のコミュニティを知ることにしました。 4月16日、ROS Russian Meetup 2019はSkolkovo Robotics 2019フォーラムの一部としてSkolkovoで開催されます。これは、あらゆるレベルのROS開発者とロボット工学が、1日を経験とコミュニティとのライブ交換に充てる機会です。 ROSに精通している場合は、 登録フォームに安全にアクセスできます。プログラムと組織情報もそこに配置されます。 会議では、ROSの歴史とコミュニティの原則について議論し、SLAMと屋内レーザーLIDARナビゲーションに関する実用的なレポートとロボットパスプランナーに多くの時間を割きます。 ROSを介して産業用マニピュレーターを制御する方法、センサーデータを使用する方法、SMACHステートマシンを操作する方法を示します。 さらに、ROSを問題なくインストールし、ロボットの開発を開始する方法についても説明します。
ちなみに、会議への参加は無料ですが、座席数が限られているため、確認をお待ちしております。 また、ROSに慣れていない人のために、簡単な概要を示します。

ROSの目から見た2次元の世界観
ロボットオペレーティングシステムは、複雑なロボットを構築するための基本的なアルゴリズムを実装するロボット用のソフトウェアフレームワークです。 さまざまなロボットプラットフォームで複雑で信頼性の高いロボット動作を作成するタスクを簡素化するように設計されたツール、ライブラリ、および標準のセットが含まれています。
このプロジェクトの主なイデオロギーは、オープンソースの原則、パッケージのドキュメント化、コードの再利用、ロボット工学のグローバルコミュニティです。
なぜ作成されたのか
ロボット用の真に信頼できる汎用ソフトウェアを作成することは困難です。 ロボットの観点から見ると、人にとって些細な問題は、ロボットシステムの開発者によるプログラミングの非常に複雑な結果になります。 これらのタスクを操作するのは非常に難しいため、単独で、または小さなチームでそれらを解決できない場合があります。
その結果、ROSはロボット工学向けの共同ソフトウェア開発を促進するためにゼロから作成されました。 たとえば、あるラボには屋内SLAMの専門家がいて、世界クラスのSLAMシステムを提供している場合があります。 別のグループは、ナビゲーションにSLAMを使用する専門家を持つことができ、別のグループは、乱雑な環境で小さなオブジェクトを認識するのに適したコンピュータービジョンアプローチを開発できます。 ROSは、このようなグループが互いに協力し、互いの成果を構築できるように特別に設計されました。
短い背景
ROSは、歴史と多数の参加者を持つ大規模なプロジェクトです。 オープンコラボレーションシステムの必要性は、ロボット研究コミュニティの多くの人々に必要であり、この目的のために多くのプロジェクトが作成されました。
2000年代半ばに、ロボット工学でのAIの使用に関して、スタンフォード大学でさまざまな取り組みが行われました。たとえば、ロボット工学で使用するために設計された動的ソフトウェアシステムのカスタムプロトタイプを作成するためのSTanford AI Robot(STAIR)プログラムやPersonal Robots(PR)プログラムなどです。 2007年、ウィローガレージはこれらの概念とプロトタイピングをさらに拡張するための重要なリソースを提供しました。 この取り組みは、ROSの基本的なアイデアと主要なソフトウェアパッケージの両方に貢献するために時間と経験を共有した無数の研究者によってサポートされました。 すべてのソフトウェアはオープンソースのBSDライセンスを使用して開発され、徐々にロボット研究コミュニティで広く使用されるプラットフォームになりました。
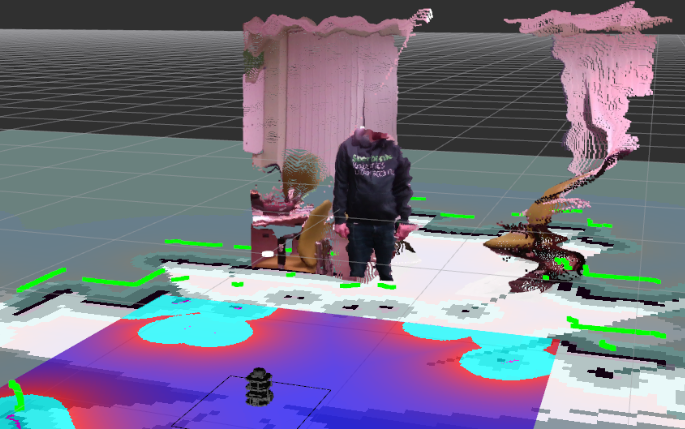
ROSの目を通して見た3次元の世界観
グローバルROSコミュニティ
ROSは最初から、いくつかの機関で、またウィローガレージからPR2ロボットを受け取った多くの機関を含むいくつかのロボットで開発されました。 すべての参加者が同じサーバーでコードをホストする方がはるかに簡単ですが、「フェデレーテッド」モデルはROSエコシステムの強みの1つになりました。 どのグループでも独自のサーバーで独自のROSコードリポジトリを実行でき、完全に所有して制御します。 誰の許可も必要ありません。 リポジトリを公開することを決めた場合、彼らは成果に値するコミュニティの認識を得て、すべてのオープンソースプロジェクトのように、テスターと改善のための提案から利益を得ることができます。
ROSは過去数年にわたって成長し、現在では世界中のユーザーの大規模なコミュニティが含まれています。 歴史的に、ほとんどのユーザーは研究室にいましたが、商業部門、特に産業用およびサービス用ロボットにますます登場しています。
ROSコミュニティは非常に活発であり、discourse.ros.orgに3,000人以上のメンバー、共同ドキュメンテーションwikiに8,000人以上のユーザー、ROSの質問に回答するサイトに約22,500人のユーザーがいます。 ウィキペディアには22,000ページ以上が含まれており、編集のペースは1日あたり約30です。
現在、ROS Metrics Report 2018によると、ロシア語を話すROSユーザーの数は、他の国の中で15位になっています。会って、議論して、修正しましょう。 また、プロジェクトのROS機能、ロボット開発の実際の実践について学ぶこともできます。
リスナーとして参加するには、 フォームに入力します。
また、コミュニティに興味深いメッセージがある場合は、引き続きスピーカーになることができます 。
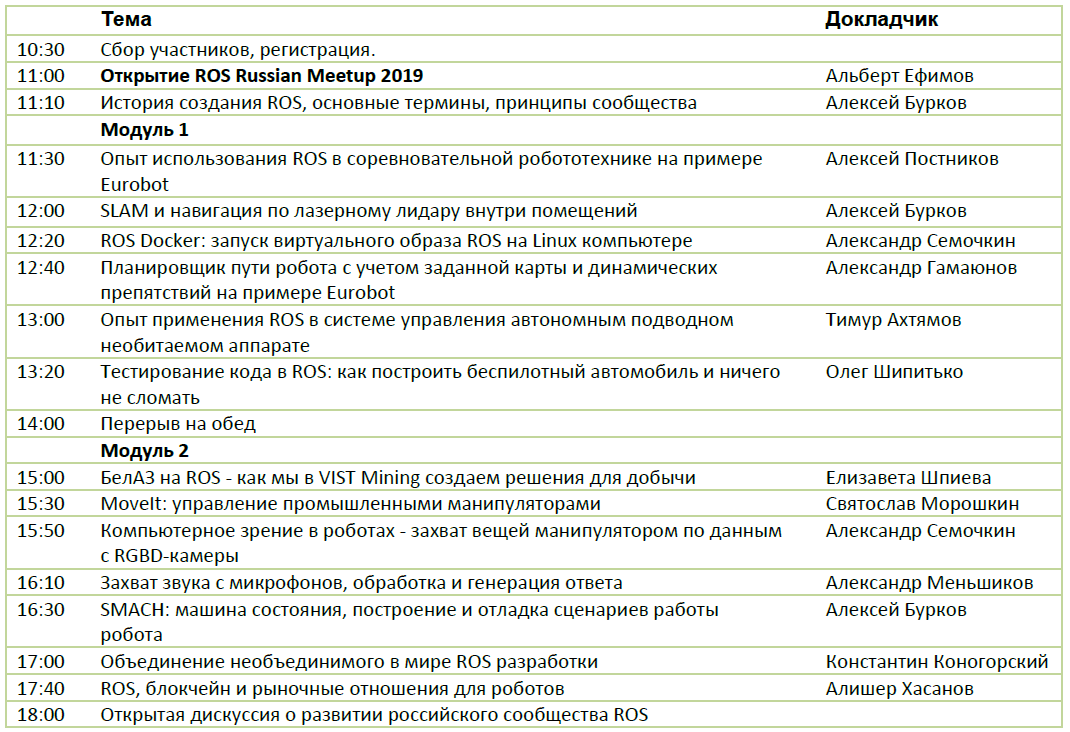
プログラム:
このイベントは、Sberbank Robotics Laboratoryによって開催されました。