初心者には、必要な専門能力がありません。 経験豊富な専門家でさえ、再構築する必要があります。 マネージャーは、質問、開始時に新しい従業員にどのようなタスクを設定する必要があり、どのくらいの時間を彼らに捧げるべきかによって圧力をかけられていますか? 同時に、関心、関与、推進、統合を確保します。 しかし、重要なビジネスタスクを危険にさらさないでください。
このため、リレー内部プロジェクトを開始しています。 それらは独立した短いステージで構成されています。 このような作業の結果は、その後の開発の基盤となり、新参者が自分自身を見せ、興味深いタスクでチームに参加し、重要なプロジェクトを完了するリスクを負わないようにします。 ここでは、経験の蓄積、同僚との知り合い、そしてレガシーの一部に厳しい制限がない場合に、最高の側から自分自身を示す機会があります。
そのようなリレー開発の例は、ストロボ効果に基づく回転スクリーンのテーマで、電話画面に作成された任意のユーザーの動的画像を表示する可能性があります 。
作業は数人の従業員によって順次行われ、新しい従業員によってオンボーディング中に継続されます(能力と能力のレベルに応じて2週間から1か月)。
手順は次のとおりです。
a)デザインを検討する(利用可能なサンプル、類似物の説明を研究し、創造的なイニシアチブを示した);
b)回路図を作成し、ボード上で分解します。
c)電話からデバイスに画像を転送するためのプロトコルを開発します。
d)Bluetooth LEを介してスマートフォンから制御を提供します。
開始オプションは、手動で回転すると碑文が表示されるようになった3葉スピナーなど、非常にコンパクトなものを使用することでした。 BLEモジュールは1つのローブに配置され、10個のRGB-LEDが2番目に、光センサーが3番目に、バッテリーが中央に配置されました。 回路図が作成され、最初の実験が行われました。 画質レベルが非常に低く、解像度が小さく、ゲーム効果が短命で、可能性が控えめであることが明らかになりました。 はい、スピナーは表示されたとおりにすばやく削除されます。 バーを上げ、回転式ストロボスクリーンを開発することが決定されました。 少なくとも展示会や会議での実用的な目的に使用することができ、近い将来、こうしたソリューションへの関心は消えることはありません。
設計に関しては、主に2つの質問がありました。LEDの配置方法(上記の例のように垂直面に、または水平に)と、LEDを使用して回転ボードに電力を供給する方法です。
教育目的のために、LEDは水平面にのみ配置されました。 ボードの電源に関しては、重要な選択がありました:コレクターモーターをかさばる、うるさい、しかし安価にするか、2つのコイルを使用する非接触電力伝送でよりエレガントなソリューションを使用します-エンジンに1つ、ボードにもう1つ。 もちろん、ソリューションはエレガントですが、より高価で長くなります。 コイルを最初に計算してから、(できれば膝の上ではなく)傷を付けなければなりませんでした。
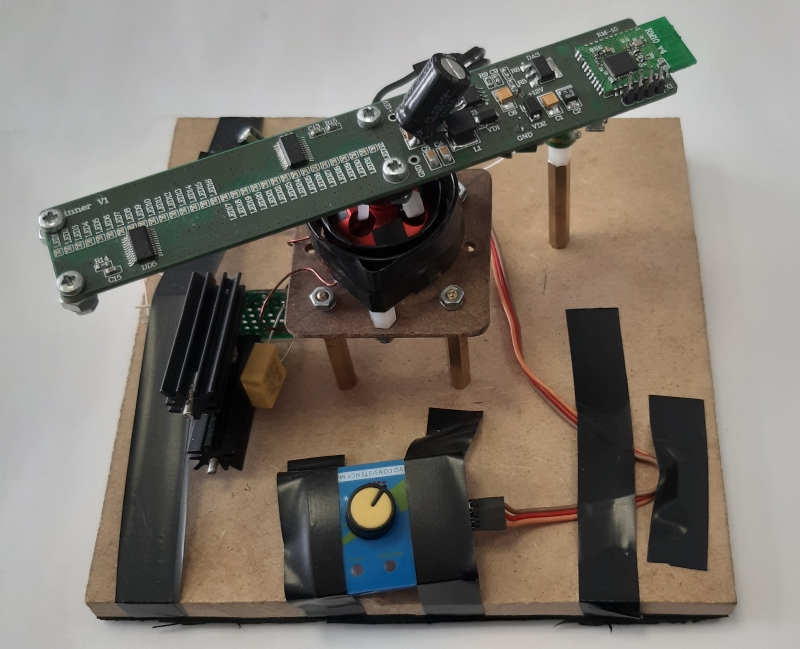
結果のプロトタイプのように見えます
大量生産の仕様では、余分なコストがすべて重要になります。 成功は、ほんの一握りの不動態化のコストによって決まります。 したがって、多くの場合、製造業者が商業的競争力を維持できるように、あまり効果的ではないが安価なオプションを選択する必要があります。 したがって、回転スクリーンが大量生産に投入されることを想像して、開発者は整流子モーターを選択しました。
結果として得られたプロトタイプは、開始時にきらめき、音を立て、テーブルを揺らしました。 安定性を確保した設計は非常に重く、寸法が大きいため、シリアルプロトタイプに組み込むのは意味がありませんでした。 中間の成功を喜んで、彼らはエンジンをエアギャップのある回転変圧器と交換することに決めました。 もう1つの理由は、コンピューターのUSBポートからエンジンに電力を供給できないことです。
LEDボードの基礎は、RM10モジュールと6つのMBI5030 LEDドライバーでした。
ドライバーには16のチャンネルがあり、それぞれを個別に制御できます。 したがって、このようなドライバ6個とRGB LED合計32個には、1600万色を表示する能力があります。
出力画像を同期して安定させるために、2つのMRSS23E磁気抵抗ホールセンサーが使用されました。
計画は簡単でした。2つのパス間のクロックに従って、センサーがボードの各ターンに割り込みを与え、LEDの位置が決定され、360度スキャンでの方位角とグローが計算されます。
しかし、何かが間違っていました-ボードの回転速度に関係なく、センサーはパスごとにランダムに1つまたは2つの割り込みを出しました。 したがって、画像はぼやけて内側に折り畳まれていることがわかりました。
センサーを交換しても状況は変わらなかったため、ホールセンサーはフォトレジスタに置き換えられました。
磁気抵抗センサーがこのように動作する理由を誰が考えたのか、コメントを共有しています。
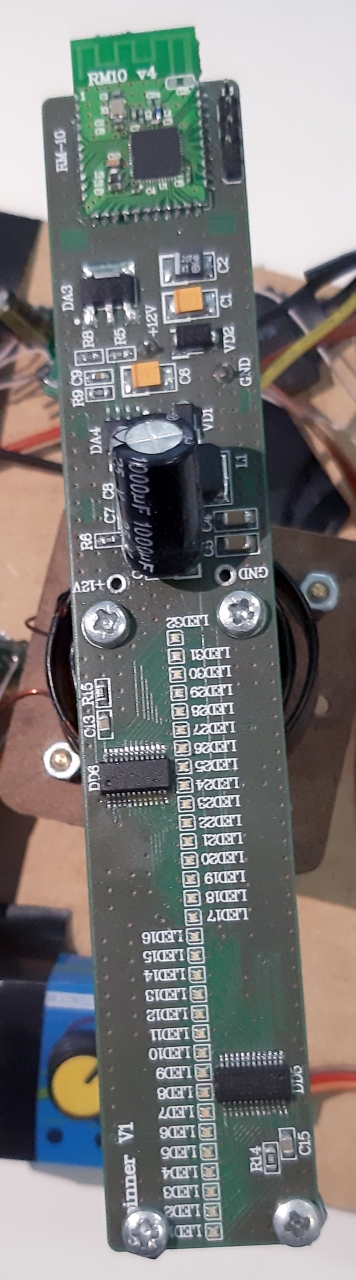
ボードの上面
光学センサーを使用すると、画像は鮮明になりますが、約30秒で安定します。 これはさまざまな理由で発生しますが、その理由の1つはタイマーの個別の性質です。 これは毎秒400万ティックで、残りを360度で割ったもので、出力画像に歪みが生じます。
中国のストロボ時計では、画像は数秒で設定されますが、円の小さなセグメントは単に表示されないという事実を犠牲にします:円形の画像には空のスポットがあり、テキストでは見えませんが、写真は不完全です。
しかし、問題は終わりませんでした。 nRF52832マイクロコントローラーは、可能な数のシェード(約16 MHz)に必要なデータ転送速度を提供できません-画面は毎秒1フレームを生成しますが、これは人間の目には十分ではありません。 明らかに、画像を制御するためにボード上に別個のマイクロコントローラーを配置する必要がありますが、今のところはMBI5030をMBI5039に置き換えることが決定されています。 これは、白を含む7色のみですが、これはソフトウェア部分を解決するのに十分です。
また、この教育的なタスクが開始されたために、マイクロコントローラをプログラムし、スマートフォン上のアプリケーションを介して制御を実行することも重要です。
現在、スキャンはnRF Connectを介してBluetooth経由で直接送信され、アプリケーションインターフェイスは開発中です。
したがって、中継チームの中間結果は次のとおりです。
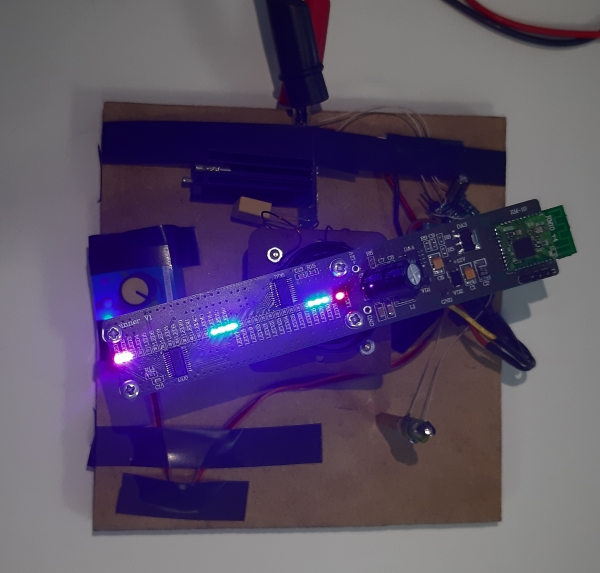
回転スクリーンには32個のLEDの列と150 mmの画像直径があります。 7色を表示し、30秒で画像またはテキストを設定します(これは理想的ではありませんが、開始には許容されます)。 Bluetooth接続を介して、画像を変更するコマンドを送信できます。
そしてそう見える
そして、トレーニングを成功させるための新しい若い開発者は、次のタスクを解決する必要があります。
カラーパレットのフルカラー表示用のマイクロコントローラのRAMの不足を克服するため。 静的または動的画像の形成および転送のためにアプリケーションを変更します。 デザインを完成した外観にします。 投稿し続けます。
PSもちろん、Bluetooth LE( nrf52832 )の作業を終えた後、ESP32でWi-Fi / Bluetoothバージョンを設計および実装しますが、これは新しい話です。
