今日、私たちはPTZカメラを準備しており、その動作原理を理解するために、鉄成分を詳細に検討しています。
カットする前に、少し見てみましょう
参加者がビデオコミュニケーションを生きていると認識できるほど快適にする方法 この効果は、カメラが部屋の一般的な計画だけでなく、特定の参加者もキャプチャする場合に実現できます。 コミュニケーションは不快感を引き起こさず、参加者が作業上の問題について議論するのを妨げないように、シーン間の移行は迅速かつスムーズでなければなりません。
これを達成する方法は? いくつかのオプションがあります。
- カメラによってキャプチャされた一般的な計画から、プログラムで画像の必要な部分を切り取ります(そして、私たち以外の人によれば、切り取ります)。
- またはPTZカメラをインストールします。 機械式または磁気式ドライブが付属しています。
磁気ドライブ付きのカメラが見つかりませんでした。 しかし、周囲に機構を備えたカメラは1ダースほどです。 また、ロシア連邦で広く普及しているPTZ FullHDカメラモデルを分解して、10年の進歩と開発で仕事の論理と原理がどのように変わったかを理解しました。 それでは始めましょう!

Tandberg-HD精密カメラTTC8-01
そこで、ノルウェーの会社Tandbergの非常に一般的なPTZカメラから始めます。 大幅な変更なしでCisco Telepresenceラインに移行し、2010年代初頭まで販売されたのはこのカメラでした。

かつて、TandbergはプレミアムPTZカメラを製造していましたが、これについては、ケースの金属部分が優勢な厳格で簡潔なデザインで語られています。
外見上、タンバーグは非常に理解しやすいように見えます-光学系とマトリックスが銀のチューブに入れられ、可動機構がカメラをベースに接続します。
ズーム:7x光学
マトリックス:1/3 "CMOS
最小焦点距離:0.3 m
視野角:42 0
水平回転:180 0 (+90 0 ..- 90 0 )
垂直傾斜:30 0 (+10 0 ..- 20 0 )
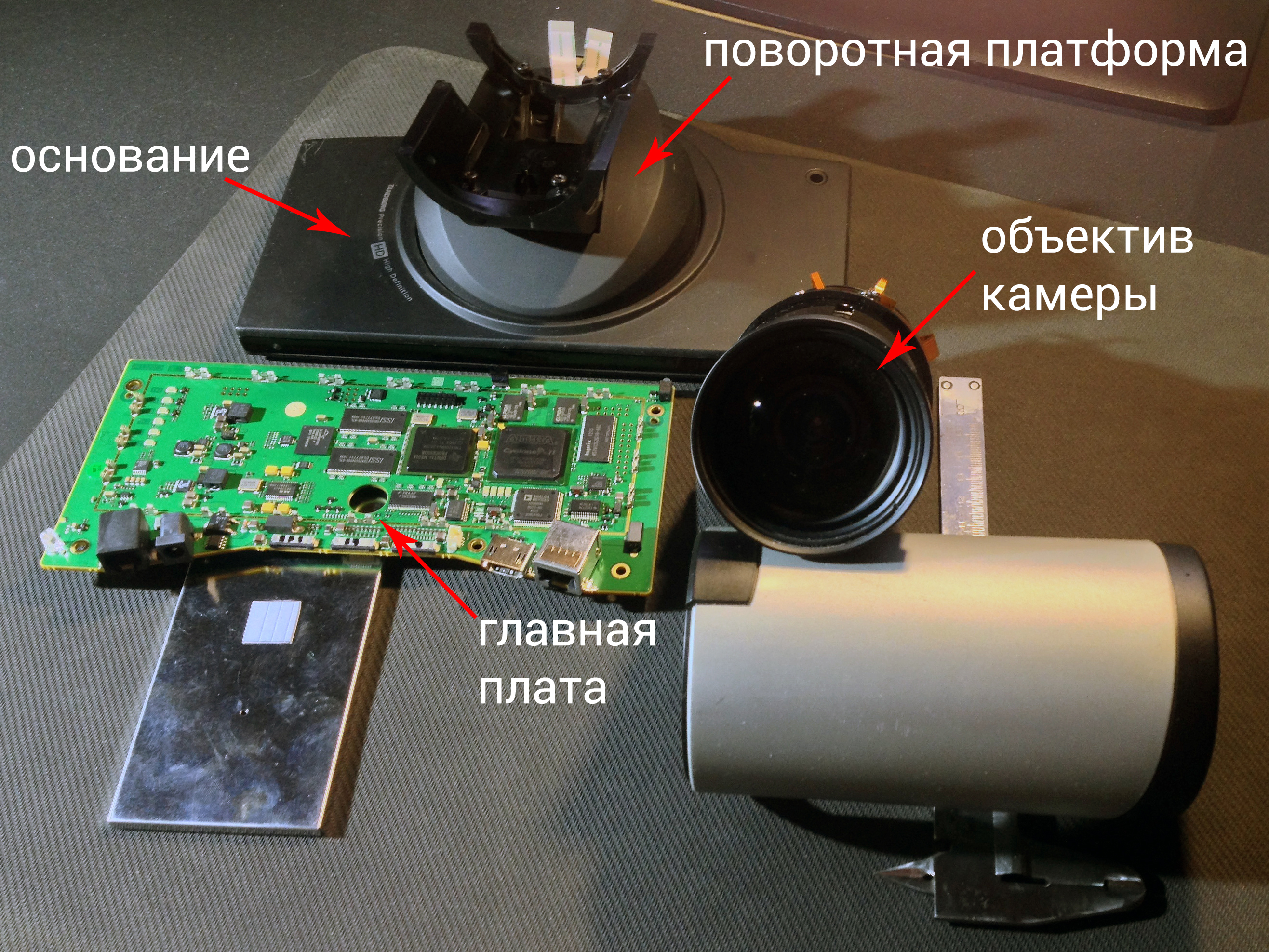
巨大な金属ベースはカメラに安定性を追加し、外部の影響から電子機器でメインボードを確実に保護します。 これに基づいて、ターンテーブルが配置されます。

カメラベッドは、移動プラットフォーム内にある特別なローラーで転がります。 このメカニズムの動作は、金属シリンダー上のサーカスアクロバットのバランスに似ています。


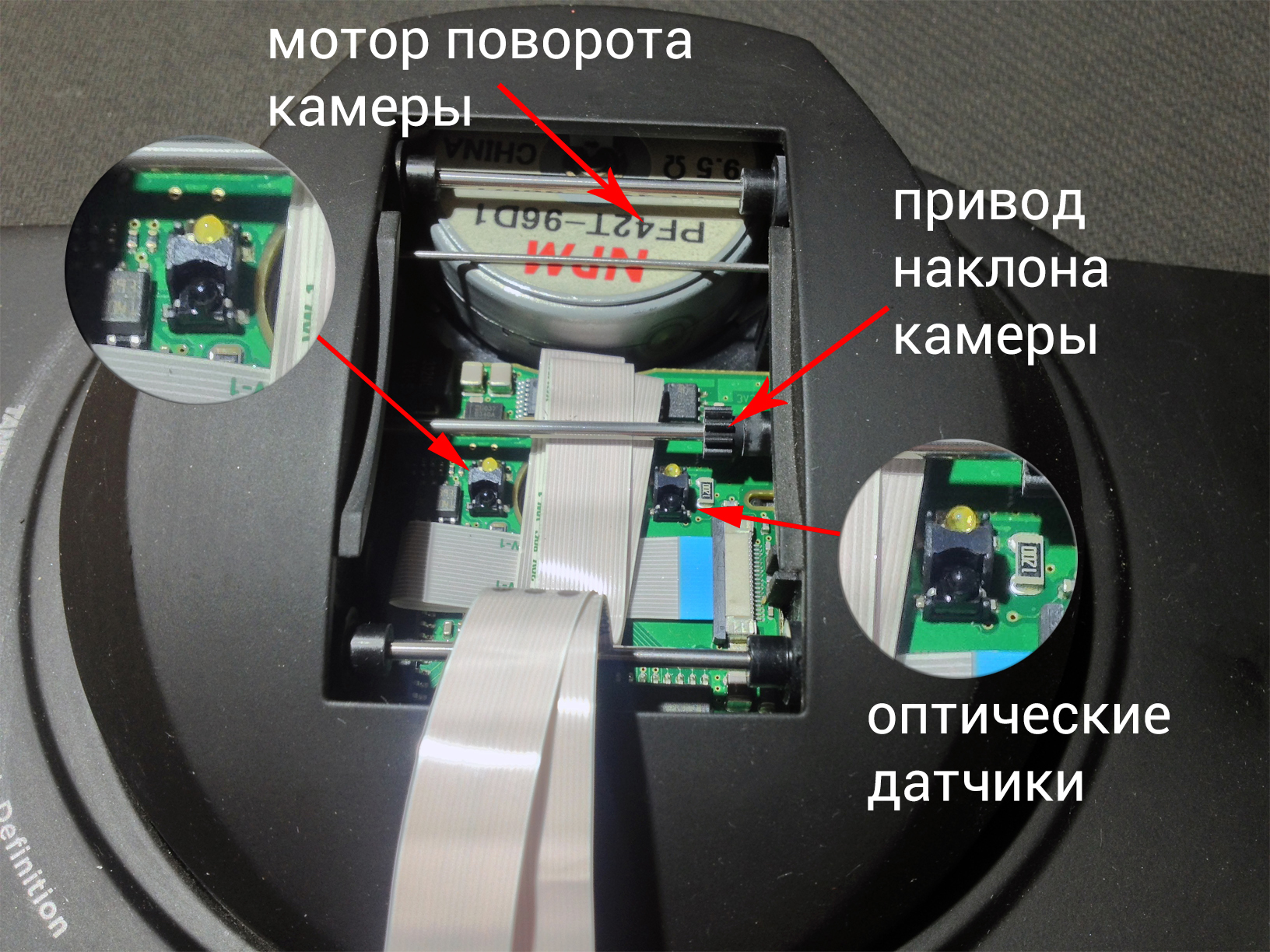
このユニットは、歯車を備えた通常の電気モーターによって駆動され、それに沿ってチャンバーのチャンバーが回転します。 このメカニズムの動作を示すために、古き良きAutodesk Fusionを明らかにする必要がありました。

各瞬間にコレクターモーターを監視するために光学センサーが呼び出され、反射光からのマークからの傾斜角が決定されます。 このために、2つの特別なパッドがギアラックの内側に取り付けられており、反射光が遮られてカメラの角度が決まります。
 低出力コレクターモーターがカメラの重い光学系に対処するために、レンズのバランスがとられて、重心がモーターの軸と一致します。 カメラの背面に大きな負荷がかかり、同じバランスを提供します。
低出力コレクターモーターがカメラの重い光学系に対処するために、レンズのバランスがとられて、重心がモーターの軸と一致します。 カメラの背面に大きな負荷がかかり、同じバランスを提供します。
ドームの下には、カメラを左右に回転させる別の駆動モーターがあります。 ただし、シャフトが小さなステップ(1ステップ= 3,750)で回転する、つまり1回の完全な回転には3,600 / 3,750 = 96ステップが必要であるという点で、コレクターのものとは構造的に異なります。 追加のボーナスは、シャフトを設定位置に保つことです。
PTZカメラの画像を安定させるために、所定の位置を維持するメカニズムがあります。つまり、手と忍耐でカメラを反対側に向けると、カメラ内のプラスチック部品がすぐに(すぐではない場合)故障します。
このルールは、電源がオフのカメラにも当てはまります。 理論的な仕組みの複雑さに触れない場合、プラスチック歯車はモーターからカメラノードに回転を伝達でき、その逆はできないと言えます。
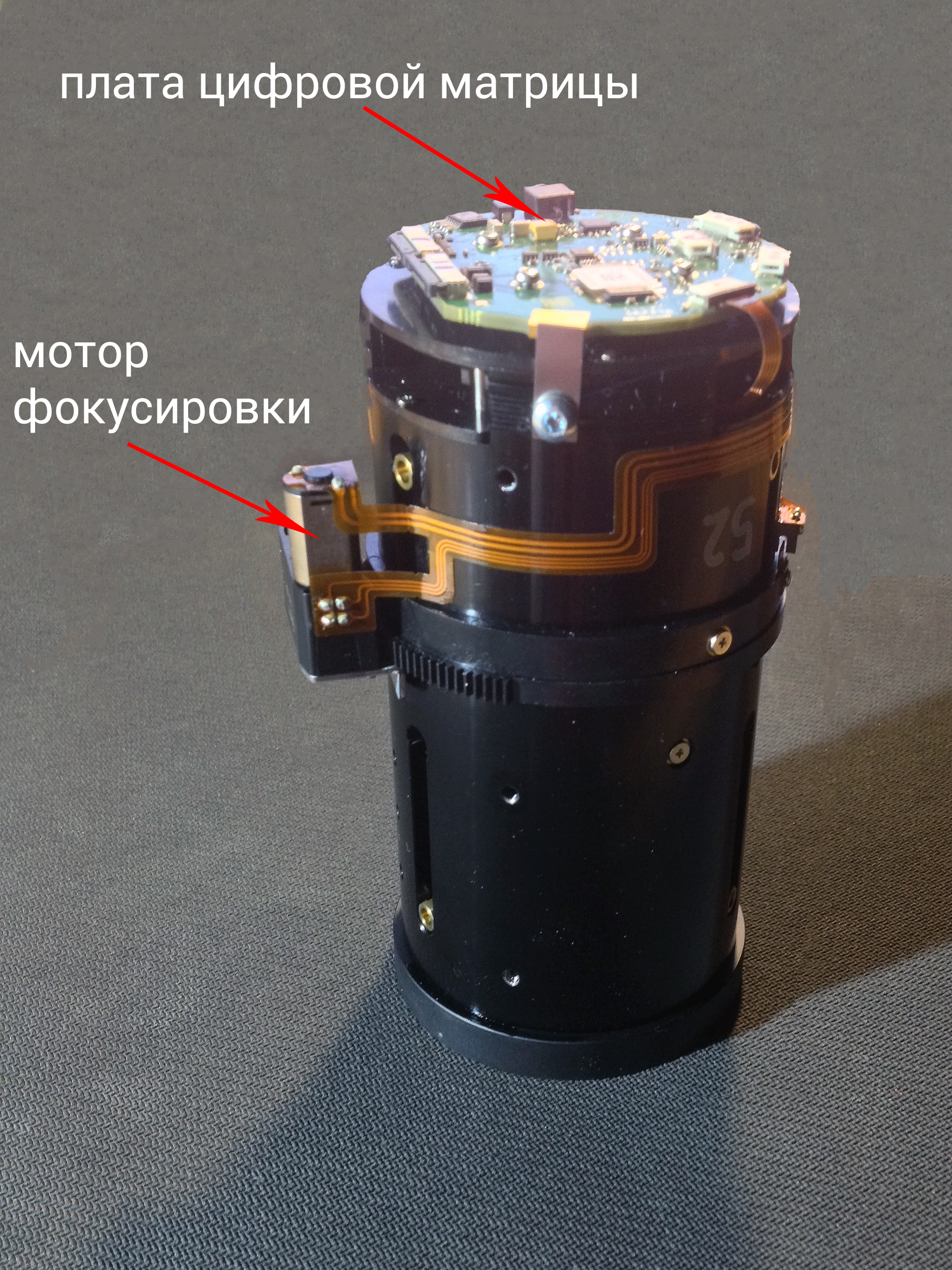
そして、最も重要なことについて-カメラについて。 構造的には、ペンタプリズムとミラーなしでのみ反射カメラのように見えます。 焦点距離は、コレクターモーターと機械的ギアによって調整されます。これらは、もちろん最新のデジタル一眼レフの超音波モーターではありませんが、固定カメラの小さな重量と寸法は、重要な指標ではありません。
エレクトロニクス
 2000年代初頭に高度な計算能力を備え、毎秒約60億命令を実行できるテキサスインスツルメンツのデジタルシグナルプロセッサがすべてを制御します。 当時、これはSoC(System on the Chip)形式の高度なソリューションであり、マルチレベルL1 / L2キャッシュ、外部RAMへの64ビットインターフェイス、10/100 Mbpsイーサネット、複数のサポートを備えた3つのビデオポートが実装されていました。許可、および他の周辺機器の管理。
2000年代初頭に高度な計算能力を備え、毎秒約60億命令を実行できるテキサスインスツルメンツのデジタルシグナルプロセッサがすべてを制御します。 当時、これはSoC(System on the Chip)形式の高度なソリューションであり、マルチレベルL1 / L2キャッシュ、外部RAMへの64ビットインターフェイス、10/100 Mbpsイーサネット、複数のサポートを備えた3つのビデオポートが実装されていました。許可、および他の周辺機器の管理。
 その当時の次の高度なマイクロ回路は、アルテラサイクロン2です。実際、通常のFPGA(プログラマブルロジック集積回路)です。 デバイスメーカーは、サーボドライブの制御からメモリデータの送信まで、あらゆるタスクにこのような回路をプログラムできます。
その当時の次の高度なマイクロ回路は、アルテラサイクロン2です。実際、通常のFPGA(プログラマブルロジック集積回路)です。 デバイスメーカーは、サーボドライブの制御からメモリデータの送信まで、あらゆるタスクにこのような回路をプログラムできます。
 HDMIバージョン1.3はAD9889Bチップによって実装され、HDCP vテクノロジーを使用したメディアコンテンツの送信を保護するFullHD(1080p)解像度をサポートします。 1.2。
HDMIバージョン1.3はAD9889Bチップによって実装され、HDCP vテクノロジーを使用したメディアコンテンツの送信を保護するFullHD(1080p)解像度をサポートします。 1.2。
残りのコンポーネントは、基本的な要素を動作させるように設計されたメモリモジュールとパッシブ無線コンポーネントです。
件名2:CleMic 1012w
ズーム:12倍光学
マトリックス:1 / 2.8″ CMOS HDセンサー
最小焦点距離:0.3 m
視野角:72.5 0
水平回転:340 0 (+170 0 ..- 170 0 )
垂直傾斜:120 0 (+90 0 ..- 30 0 )
カメラ本体は完全にプラスチック製で、広く安定したベースを備えています。 カメラの前面にはリモートコントロール用のIRレシーバーがあり、背面にはインターフェイスコネクタがあります。 カメラの重量は小さいです。天井のアームストロングに吊るしたり、石膏ボードのパーティションに固定したりできると思います。

Tandbergのステッピングモーターが駆動力として機能し、駆動プーリーにトルクを伝達するよりも、移動軸ははるかに単純でわかりやすいように構成されています。
モバイルプラットフォームには2つの中空ラックがあり、その間にカメラが固定され、ラックの1つの空洞に駆動機構が隠れています。そのため、傾斜角が変化します。
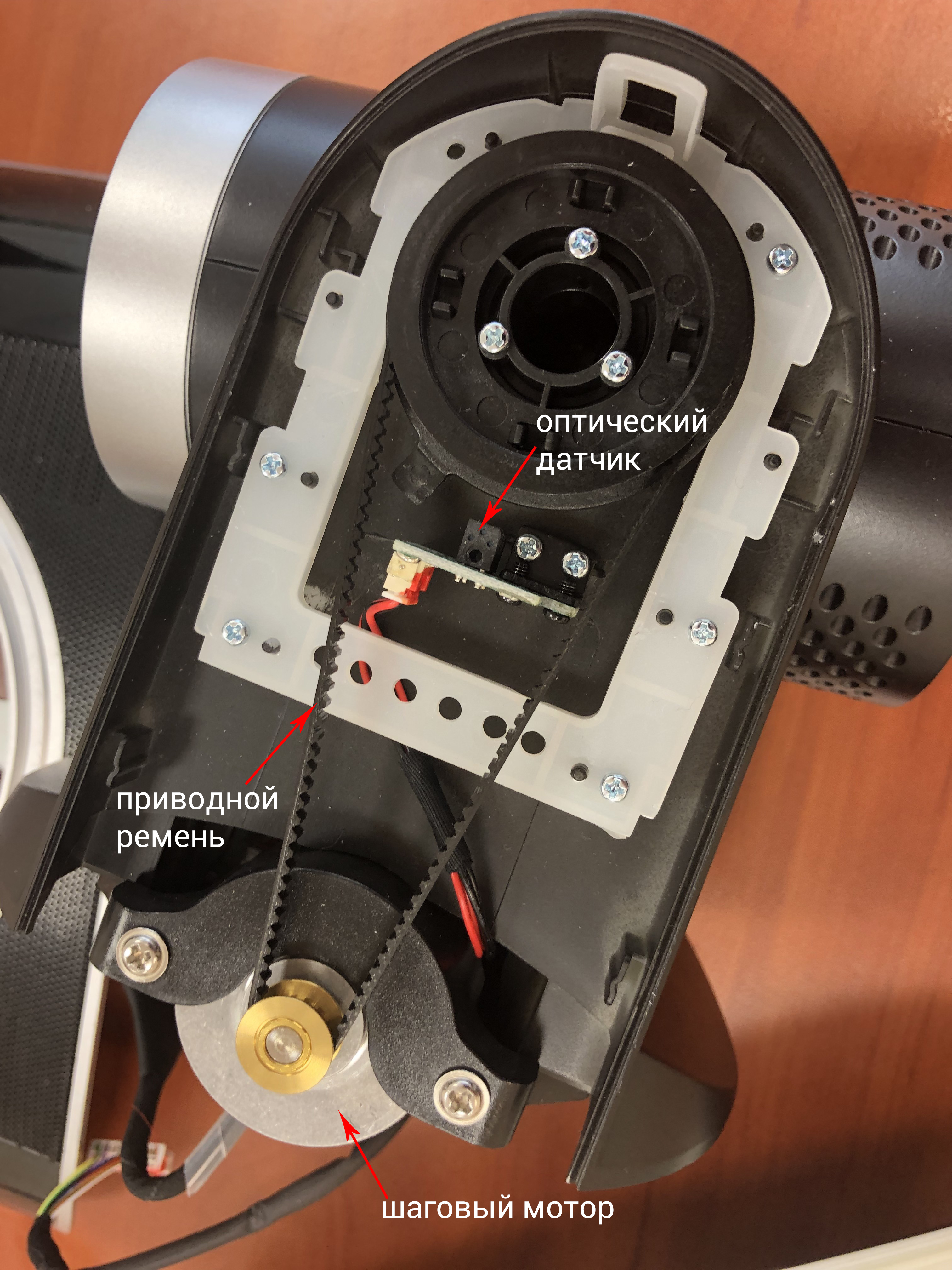
ドライブプーリーより少し下が光学センサーです。 このトレーラーは、電源を入れた後にカメラの位置を決定するために必要です。

起動時に、レンズが傾き、特殊なスパイクが光学センサーの光の流れを遮ると、システムは最低点に到達したことを認識します。 それ以降の位置決めはすべて、ステップをカウントすることによって行われます。
カメラを左右に回転させるモーターは、カメラの水平位置を決定するための同じトレーラーを備えた6本のネジで嵌合フランジの後ろに隠れています。
嵌合フランジは静止しているため、中央には2本のケーブルがあります。モーターの制御用とデジタルマトリックス付きのケーブルです。
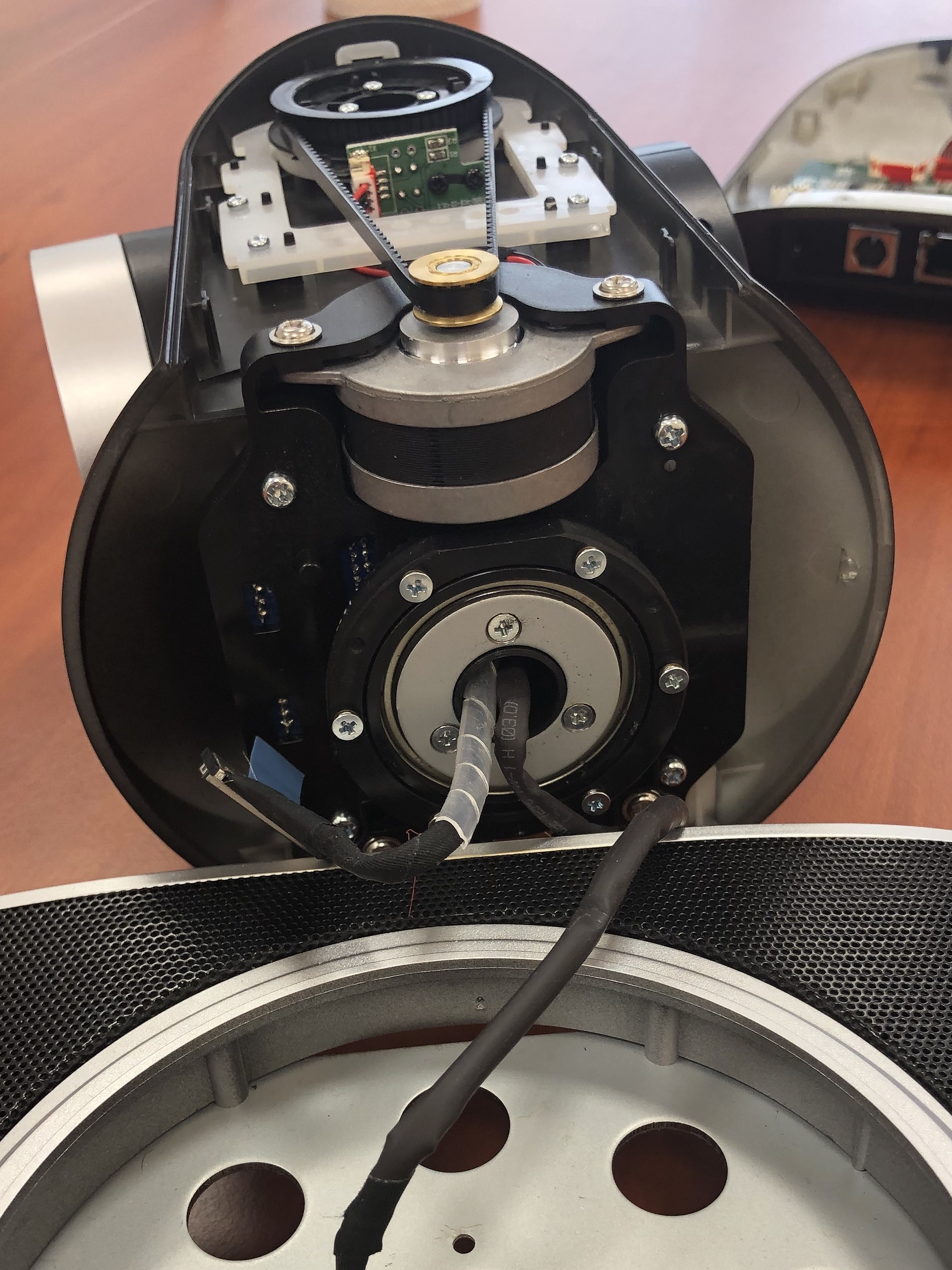
ご覧のとおり、機械式トランスミッションシステムは強力なステッピングモーターのみで構成されているため、カメラの位置決めがより正確かつ高速になり、ベルト駆動によりデバイス自体のノイズレベルが低減されます。

カメラの電子機器は多くの点で非常によく似ているので、明らかな違いについて説明した方がよいでしょう。 USB3.0とRS-232は新しいものから登場し、その助けを借りてビデオを圧縮形式で取得したり、そのようなカメラのカスケードを組み立てたり、UART(RS232)を通じて会議参加者への指示を完全に自動化したりできます。
私見
ご覧のとおり、最新のPTZカメラは設計の信頼性が高く、センサーが優れており、接続方法に汎用性がありますが、残りは以前のものからそれほど遠くありません。 1つに加えて-価格は5倍低くなりました。 そのため、今日、このPTZ獣がエキゾチックでなくなったPCを備えた会議室が増えています。