私があなたの注意を喚起したいのは、スクリプト化された3Dモデリングシステムをもう一度書く試みです。 私が彼女に会いたいように書いてください。
ZenCadシステムのレシピは非常に簡単です。 OpenScadの3Dモデリング、OpenCascadeのジオメトリックコア、接着剤としてのpython3、アグレッシブな計算キャッシュのための遅延計算ライブラリevalcacheのスクリプト作成のコンセプト。 他のいくつかの楽器からスパイスを追加し、PyQtソースでguiを味付けし、攪拌しますが、振盪しません。
CADシステムのスクリプト作成
CAD、または当社のCADによると、コンピューター支援設計システムです。 インタラクティブな3Dエディターとは異なり、スクリプト化されたCADシステムは、作成者が通常理解しているという意味で「自動化」という言葉を解釈します。 つまり、コンピューティングツールのセットとしてではなく、作成時にのみ人間の介入を必要とする非常に明確なアルゴリズムとしてです。
スクリプト化されたCADでの作業では、モデルを画面に直接描画しませんが、モデルの生成に応じてプログラムを構築します。 インタラクティブCADのみに精通している人にとって、このアプローチは絶対的なパラメトリックモデリングとして説明できます。 厳密に言えば、スクリプトは多くの場合、対話型環境を補完し、追加のツールを作成するために使用されますが、パラダイム的にクリーンなスクリプト化されたCADで作業するには、ワークフローの異なる編成、考え方が必要であり、わずかに異なる範囲のタスク向けに設計されています。
現時点で最も有名で純粋なスクリプトCADはOpenScadです。
最初はOpenScadでした
便利なコンパス、SolidWorks、FreeCad、ありふれた気取らないOpenScadを好む人たちがいます。 彼の成功の秘whatは何なのかという質問に答えるのはかなり難しいですが、それは軽量で、使用するのに十分な柔軟性があり、設定が最小限であると断言できます。 そこに書かれたモデルの一部は簡単に再利用できます。
ただし、openscadにはいくつかの迷惑な欠陥があります。
- openscadはメッシュネットワークでのみ機能します。
- openscadのスケーラビリティの制限はかなり低く、大きなモデルでは大幅に遅れ始めます。
- openscadを他のシステムと統合することは非常に難しく、その理由は独自の言語を使用しているためです。
残念ながら、スクリプティングアプローチのすべての能力により、実用的なフラッシュの範囲を超えてOpenScadで簡単なモデルを書くことは非常に問題があります。
言語とすべてすべて
ここで最初に修正したいのは、汎用ツールを戦闘ツールとして使用することです。 汎用言語を使用すると、構文機能の完全性と以前に作成されたライブラリの組み合わせを使用して、3Dモデリングの問題を解決できます。
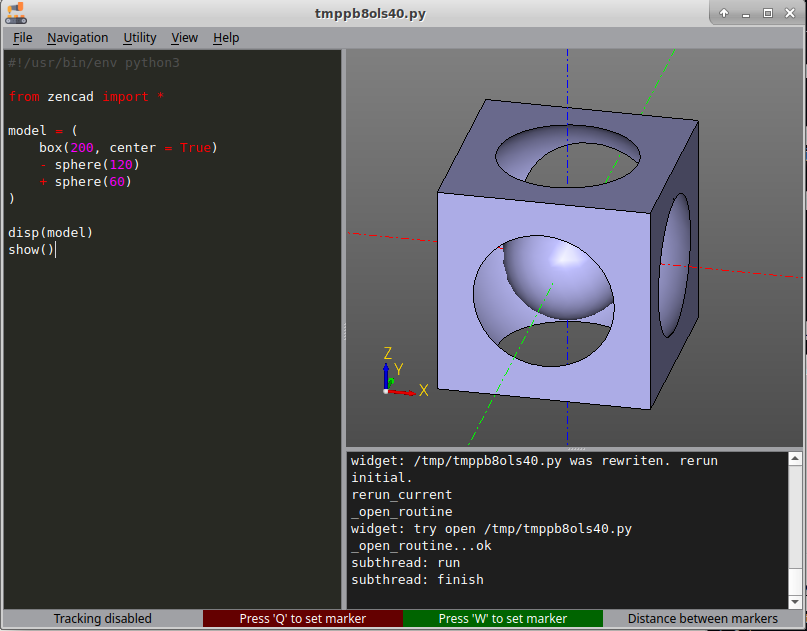
ZenCadインターフェース:
OpenScadインターフェース:
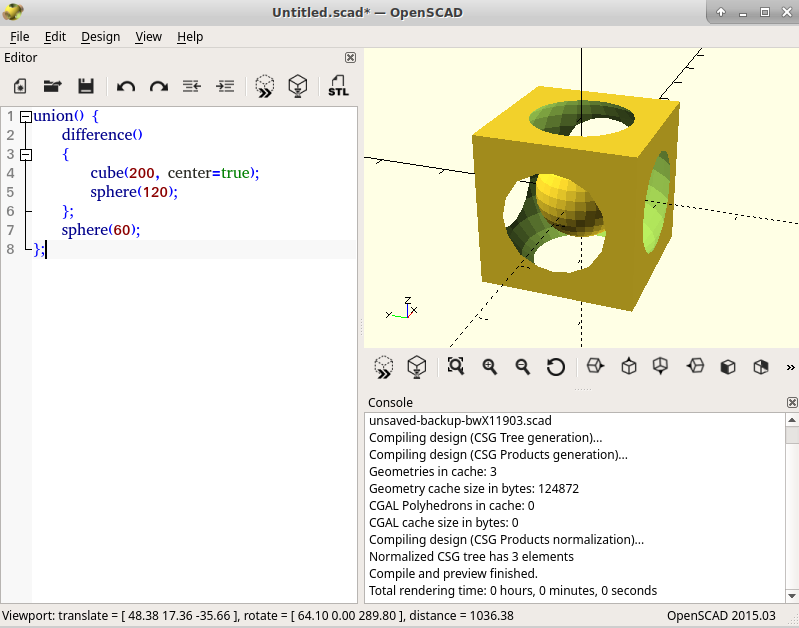
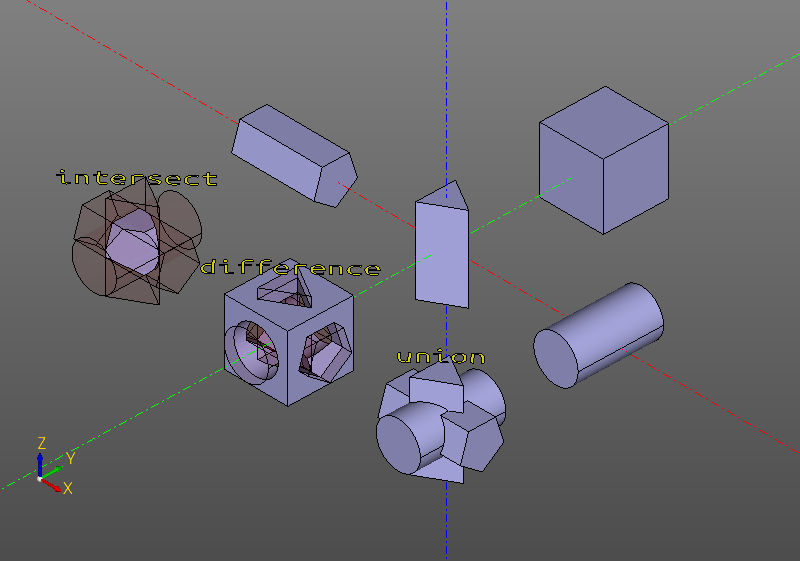
Pythonを使用すると、OpenScadと比較してモデルコードがより透明になり、openscadコードが簡素化されます。
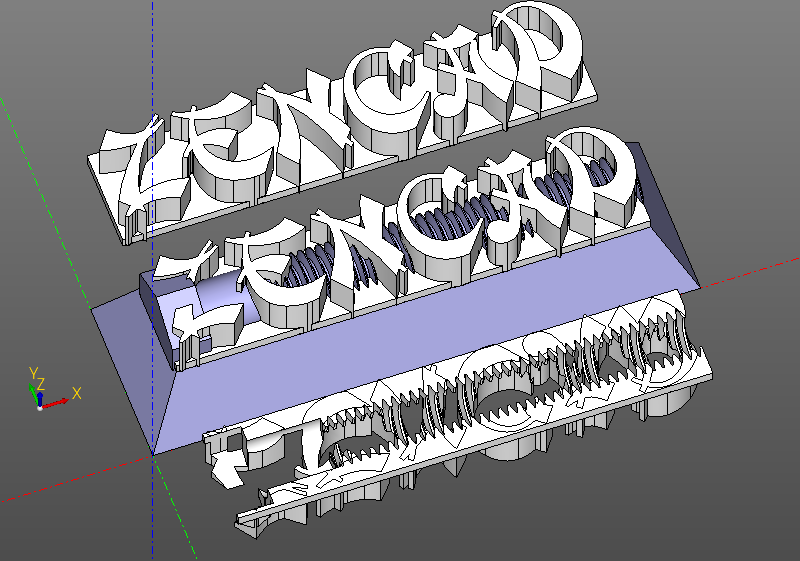
#!/usr/bin/env python #coding: utf-8 from zencad import * lazy.diag = True c1 = 100 c2 = 130 c3 = c2/2 + 20 base = box(c1,c1,c1,center=True) f1 = ngon(r = 35, n = 3) f2 = ngon(r = 35, n = 5) f3 = circle(35) s1 = linear_extrude(f1, c2, center=True) s2 = linear_extrude(f2, c2, center=True).rotateY(deg(90)) s3 = linear_extrude(f3, c2, center=True).rotateX(deg(90)) # 3 . m1 = base - s1 - s2 - s3 m2 = base ^ s1 ^ s2 ^ s3 m3 = s1 + s2 + s3 ystep = 240 xstep = 240 fontpath = os.path.join(zencad.moduledir, "examples/fonts/testfont.ttf") # . . t1 = textshape("difference", fontpath, 40) t1c = t1.center() t1=t1.translate(-t1c.x, -t1c.y, 0).rotateZ(deg(45)) t2 = textshape("intersect", fontpath, 40) t2c = t2.center() t2=t2.translate(-t2c.x, -t2c.y, 0).rotateZ(deg(45)) t3 = textshape("union", fontpath, 40) t3c = t3.center() t3=t3.translate(-t3c.x, -t3c.y, 0).rotateZ(deg(45)) # , . disp(base.forw(ystep)) disp(s1) disp(s2.left(xstep)) disp(s3.right(xstep)) disp(m1.back(ystep)) disp(m2.left(xstep).back(ystep)) disp(m3.right(xstep).back(ystep)) disp(t1.back(ystep).up(c3), Color(1,1,0)) disp(t2.left(xstep).back(ystep).up(c3), Color(1,1,0)) disp(t3.right(xstep).back(ystep).up(c3), Color(1,1,0)) disp(s1.left(xstep).back(ystep), Color(0.5,0,0,0.95)) disp(s2.left(xstep).back(ystep), Color(0.5,0,0,0.95)) disp(s3.left(xstep).back(ystep), Color(0.5,0,0,0.95)) disp(s1.back(ystep), Color(0.5,0,0,0.95)) disp(s2.back(ystep), Color(0.5,0,0,0.95)) disp(s3.back(ystep), Color(0.5,0,0,0.95)) show()
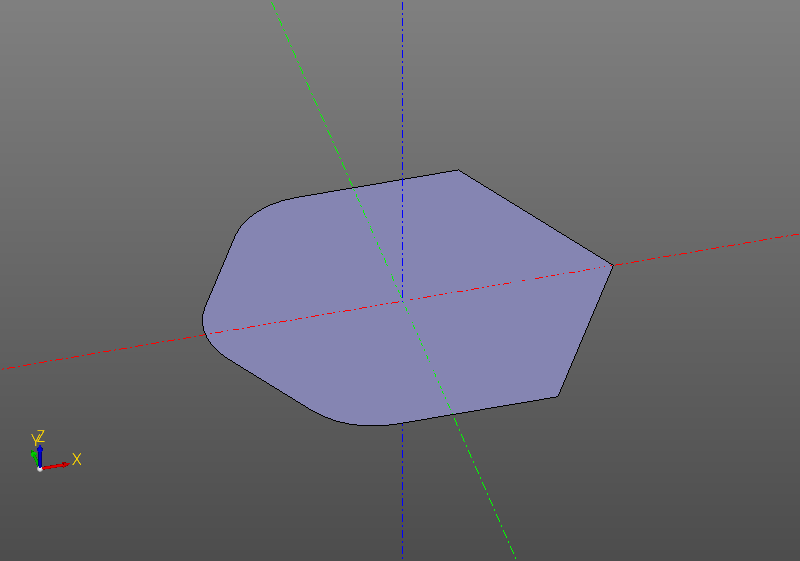
たとえば、ジェネレータの構文を使用して点群をフィルタリングすることは非常に便利です。
#!/usr/bin/env python3 from zencad import * # . ng = ngon(r = 10, n = 6) # . vertices = ng.vertices() filtered_vertices = [v for v in vertices if vx < 0] # . m = ng.fillet(4, filtered_vertices) disp(m) show()
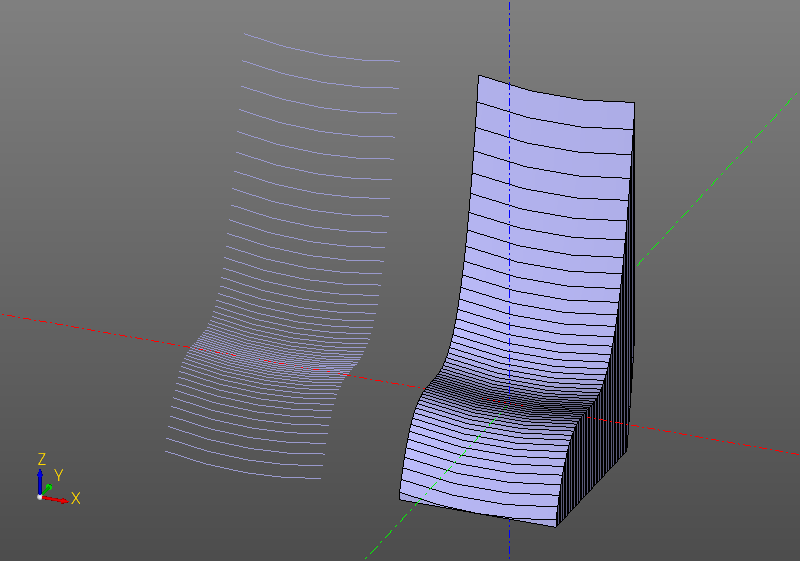
pythonのおかげで、現代のソフトウェアエコシステムで非公式に接着剤の王の称号を占めているzencadは、他のライブラリやソフトウェアシステムと簡単に統合できます。 1つのスクリプトでsympyを使用して分析サーフェスを生成し、numpyを使用してこのサーフェスで生成された点群を処理し、もちろんzencadを構築、視覚化、および後処理することができます。
from zencad import * import numpy xcoords = numpy.linspace(-10,10,50) ycoords = numpy.linspace(-10,15,50) lines = [ interpolate([point(x, y, 0.01*(x**2 + y**3)) for x in xcoords]) for y in ycoords ] wires = [] for l in lines: trans = translate(0,0,-30) sf = l.endpoints() w=sew([l, segment(sf[0], trans(sf[0])), trans(l), segment(sf[1], trans(sf[1]))]) wires.append(w) for l in lines: disp(l.left(30)) disp(loft(wires) - halfspace().down(10)) show()
OpenCascadeの強固な基盤
ポリゴンメッシュの数学は、境界表現の数学よりもはるかに単純ですが、境界表現の方がはるかに実用的です。 特に、ポリゴンメッシュには組み合わせ爆発の問題があり、これは特にモデルをレンダリングするときが来るときに現れます。 OpenScadでは、多くの場合、実際のモデルの解像度よりはるかに低い解像度で製品を開発する必要があり、これはパラダイムの純度に違反します。
したがって、実装の2番目のポイントは、メッシュモデルの代わりに境界表現を使用する本格的なジオメトリックコアの使用です。 もちろん、OpenCascadeのハッカーの幾何学的コアを中心に構築されたZenCadは、Python環境でその機能を完全に提供することを目的としていません。 OpenCascadeを完全に伝えようとすると、2番目のpythonOCCが作成されます。 ZenCadがトップを占め、機能と人間工学のバランスを維持しようとしています。
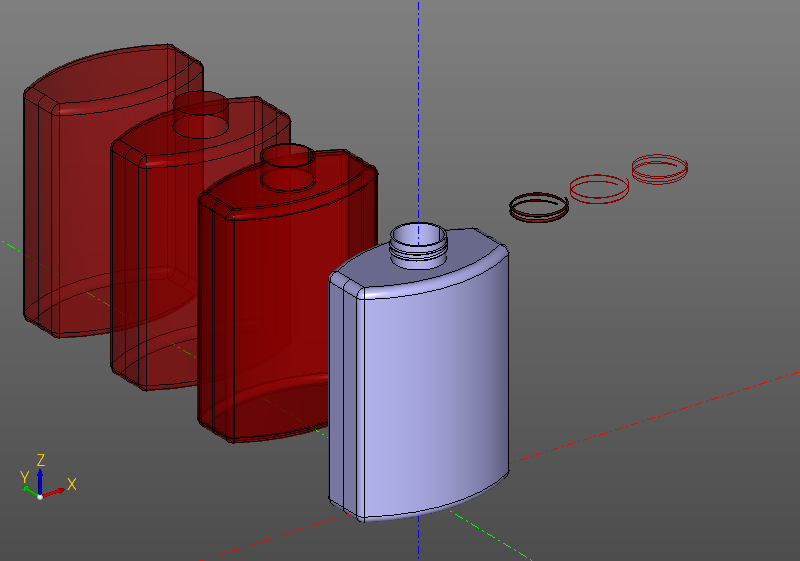
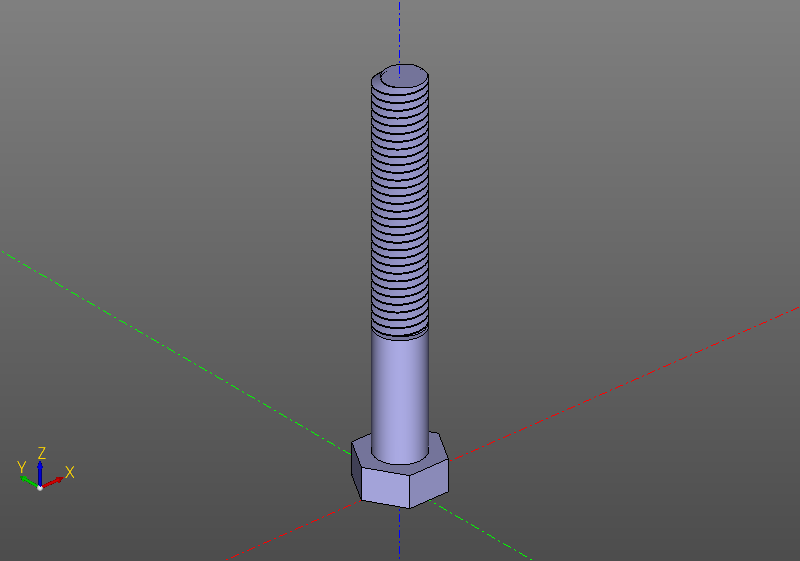
#!/usr/bin/env python3 #coding: utf-8 from zencad import * import zencad.surface as surface import zencad.curve2 as curve2 lazy.diag=True height = 70 width = 50 thickness = 30 # BASE pnt1 = point(-width/2,0,0); pnt2 = point(-width/2,-thickness/4,0); pnt3 = point(0,-thickness/2,0); pnt4 = point(width/2,-thickness/4,0); pnt5 = point(width/2,0,0); edge1 = segment(pnt1, pnt2) edge2 = circle_arc(pnt2, pnt3, pnt4) edge3 = segment(pnt4, pnt5) wire = sew([edge1, edge2, edge3]) profile = sew([wire, wire.mirrorX()]) body = profile.fill().extrude(height) body = fillet(body, thickness/12) hl(body.forw(140)) # NECK neck_radius = thickness/4.; neck_height = height/10; neck = cylinder(r=neck_radius, h=neck_height).up(height) body = body + neck hl(body.forw(100)) # THICK body = thicksolid(body, -thickness / 50, [point(0,0,height+height/10)]) hl(body.forw(60)) # THREAD ( 2 .) cylsurf1 = surface.cylinder(neck_radius * 0.99) cylsurf2 = surface.cylinder(neck_radius * 1.05) major = 2 * math.pi; minor = neck_height / 10; angle = math.atan2(neck_height / 4, 2 * math.pi) ellipse1 = curve2.ellipse(major, minor).rotate(angle) arc1 = cylsurf1.map(curve2.trimmed_curve2(ellipse1, 0, math.pi)) segment1 = cylsurf1.map(curve2.segment(ellipse1.value(0), ellipse1.value(math.pi))) ellipse2 = curve2.ellipse(major, minor/4).rotate(angle) arc2 = cylsurf2.map(curve2.trimmed_curve2(ellipse2, 0, math.pi)) segment2 = cylsurf2.map(curve2.segment(ellipse2.value(0), ellipse2.value(math.pi))) m1 = sew([arc1, segment1]) m2 = sew([arc2, segment2]) thread = loft([m1, m2]).up(height + neck_height / 2) hl(m1.up(height + neck_height / 2).right(80)) hl(m2.up(height + neck_height / 2).right(60)) hl(thread.right(40)) # FINAL m = thread + body display(m) show()
伝統の継続。 すべての源泉としての起源
兄とOpenScadの教師の例に続くzencad構文ソリューションは、ライブラリ内のエンティティの数を最小限に抑えます。 OpenScadと同様に、ZenCadは基本的にポイント(x、y、z)でプリミティブを作成できませんが、OpenCascadeではこれを許可しています。 ZenCadは、最初に原点にプリミティブを作成してから、変換を使用して目的の位置を設定します。 ZenCadの変換は、個別のオブジェクトとしても、ボディのメソッドとしても存在します。
# . cube(40, center=True).rotateX(deg(45)).rotateZ(deg(45)).right(20) # . (right(20) * rotateZ(deg(45)) * rotateX(deg(45)))(cube(40, center=True)) # . trans = right(20) * rotateZ(deg(45)) * rotateX(deg(45)) cube(40, center=True).transform(trans)
一連の変換が標準であり、変換、回転、反射、ズームが含まれます。
怠azine
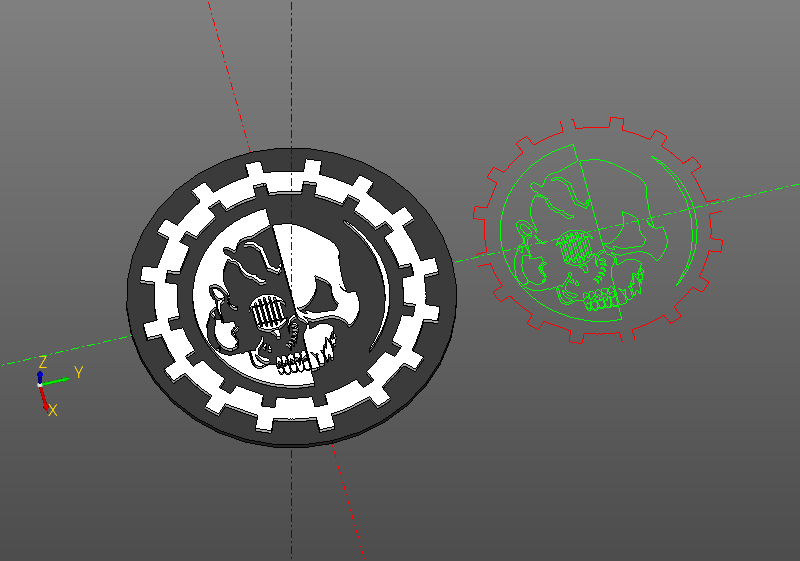
計算時間を最小限に抑えるために、ZenCadの数学は厳密化され、すべての計算は積極的にキャッシュされます。 先ほどHabrahabrのページで説明した[del]ブロックチェーン[/ del] evalcacheライブラリーは、検証アルゴリズムの管理を担当します。 Zencadは計算結果を共通のキャッシュに保存します。そのキャッシュの状態は、ビジュアライザーインターフェイスを介して監視できます。 マークされた冗長性で使用されるsha512ハッシュアルゴリズムは、遅延オブジェクトのハッシュキーの衝突の可能性を排除します(ハッシュ空間は、宇宙の原子の数の10 ^ 74倍です)。
このモデルを作成すると、4メガバイトのジオメトリが生成され、最初のパスでかなり長い時間計算できます。
ねじ山のある表面での作業は計算コストがかかります。
反射トポロジーの問題。 近点法
OpenScadには面取りや丸み付けの操作はありません。 OpenCascadeはそれらを提供します。 これらは非常に重要な操作であり、ZenCadにサービスを提供しないのは残念です。 トポロジオブジェクトを指定する必要がある他の操作があります。たとえば、OpenCascadeボトルの例で薄壁モデルを取得する操作です。 グラフィカルなCADシステムでは、トポロジオブジェクト(エッジ、面、頂点)をマウスで示します。 スクリプトを書くとき、そのような機会はありません。 ネイティブOpenCascadeは、リフレクションの問題を解決し、それを使用してグラフィックCADを操作します。 ZenCadはモデルのリフレクションをサポートしていますが、これを主要なツールとして使用すると、多くの重大な欠点があります。 まず、少なくとも内部トポロジの概念を理解する必要があるため、これらのツールを使用するために必要な知識のレベルが急激に増加します。 次に、スクリプトにifが表示されるとすぐに、遅延アルゴリズムの調和がすぐに崩れ、モデルコードも非常に複雑になります。 非常に長い反射と実験の過程で、私は近点法に落ち着きました。 つまり、トポロジに依存する操作を実行する場合、プログラムはオブジェクトをバイパスし、身体に入るオブジェクトの中から、指定されたポイントに最も近いトポロジオブジェクトを見つけます。 このアイテムは選択済みと見なされます。 このようなソリューションは計算コストが高くなりますが、キャッシングのためにパフォーマンスが向上します。 このアプローチは、トポロジ要素に依存するすべての操作に使用されます。
前述のように、上記の例(例:点の配列のフィルター処理)で既に示したように、常識によりモデルを反映する可能性も保持されます。
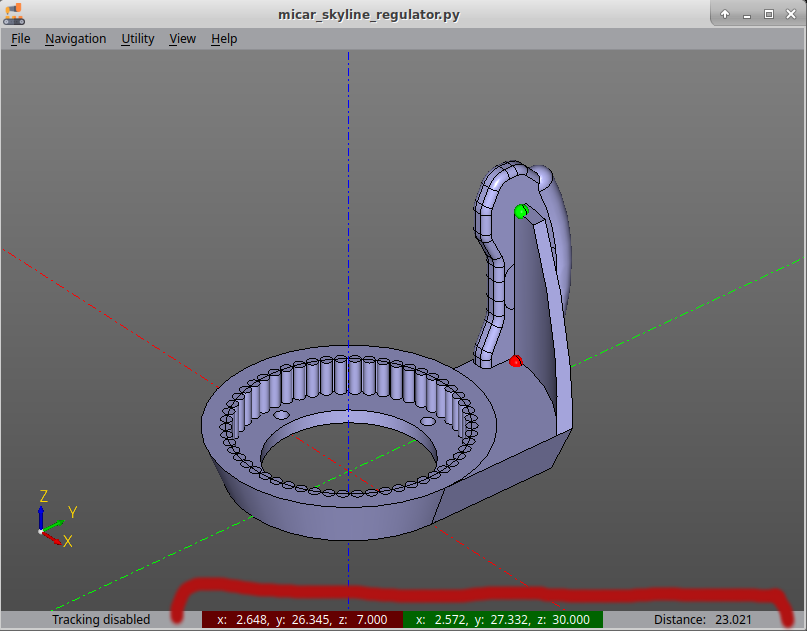
マーカーQおよびマーカーW
モデルの寸法は、目立たないために画面から読み取ることが困難な場合があります。 一部では、マーカーはこの問題を解決できます。 直感的なインターフェイス(どこよりも直感的ではない)を備えたマーカーは、座標に信号を送り、距離を表示します。これにより、面取りや丸み付けなどの操作のジオメトリの分析とポイントの選択が簡単になります。
ソース更新の追跡
兄貴(OpenScad)と同様に、ZenCadはソースファイルを変更するときに生成されたモデルを更新できます。 キャッシングシステムと組み合わせることで、スクリプトを非常に便利に変更でき、目の前にほぼリアルタイムで製品の状態が変化します。
アニメーション
zencadのメリットはそれだけではありません。
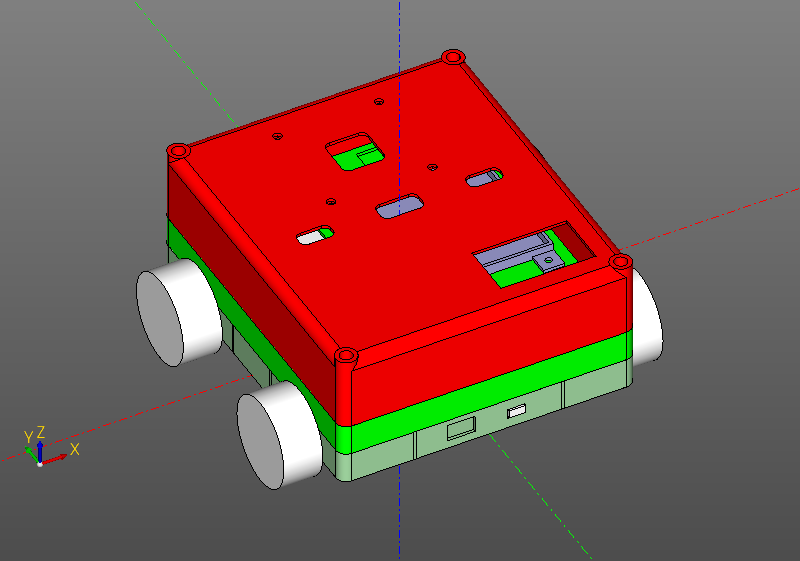
ZenCad(高速コアのオープンカスケードのおかげ)は、シーンをリアルタイムで再描画できるため、3Dモデルをアニメーション化できます。 アニメーションは、通常のpython関数によって実装され、非常に自由に自分自身を扱うことができます。 Python環境にいることを考えると、zencadは外部ソースからのデータをモデルの動きの形で視覚化できます(たとえば、マルチスレッド+ tcpsocketを使用)。 したがって、zencadは、たとえばロボット製品の半自然なテストに使用できます。 こんにちは、ガゼボ! こんにちはROS !!! 聴衆の中で会えてうれしいです。 ところで、ロボットマニピュレーターの運動連鎖の構築を大幅に簡素化する運動学のライブラリが開発中です。
現時点でのアニメーションはまだ(特にカメラ制御の観点から)半実験バージョンであるため、詳細については説明しません。
エクスポート-インポート
現在、brep形式でのエクスポートとインポートがサポートされています。これにより、freecadとの統合が可能になり、stl形式でのエクスポートが可能になり、3D印刷用のモデルを生成できます。 スクリーンショットの生成もサポートされています。 自動を含む。 特に、オンラインマニュアルのスクリーンショットはZenCadによって自動的に生成されます。
現状
現時点では、ZenCadはまだ完成にはほど遠いですが、準備が整っている部分では完全に機能しています。
このライブラリは、python3.5、python3.6、python3.7のバージョンのDebian互換軸用にpipyで利用可能です
(PyQt5のプラグインに問題があるため、qt5-defaultのインストールが必要になる場合があります)
python3 -m pip install zencad apt install qt5-default
コマンドラインからGUIを実行する:
python3 -m zencad
PythonスクリプトからGUIを実行する:
#!/usr/bin/env python3 import zencad m = zencad.cube(20) zencad.disp(m) zencad.show()
残念ながら、システムの進歩は私たちが望むほど速く進んでいません。 2次元ジオメトリのAPIとサーフェスを操作するAPIのほとんどはまだ実装されていません。標準形式のエクスポートとインポートのサポート、エラー処理は常に透過的ではありません、自動テストは機能していません、ねじ継手とギア製品を構築するためのライブラリは考案され、まだ実装されていません。 完全に異常な外部エディターとして、突然ハードコア!!! 崇高なテキスト...システムをWindowsで実行できるように洗練したいのです(これには非常に多くの高度なインテリジェンス作業が必要です)。
ただし、現在、zencadを使用すると、非常に複雑な3Dモデルを設計し、3D印刷用のモデルを作成し、メカニズムの運動学を視覚化することもできます。
プロジェクトリンク
github: https : //github.com/mirmik/zencad、https : //github.com/mirmik/servoce
pypi: https ://pypi.org/project/zencad/、https://pypi.org/project/pyservoce/
ご清聴ありがとうございました。