図 1.産業用制御システムで使用されるさまざまな通信プロトコル
典型的なデータ収集システムの仕組みについて簡単に説明します(少し簡略化)。
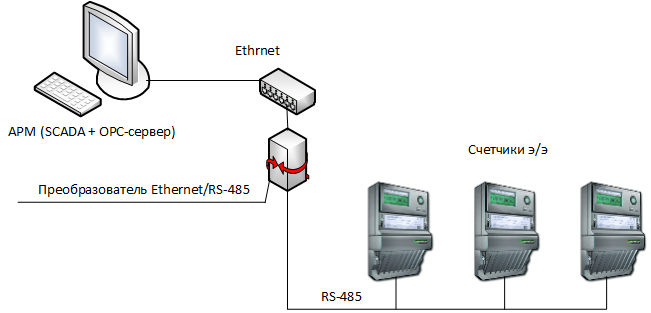
図 2.データ収集システム
OPCサーバーと呼ばれる特別なソフトウェアは、RS-485インターフェースに接続されたデバイスをポーリングします。 OPCサーバーは、SCADAシステムとデバイス間の一種のレイヤーであり、デバイスが通信する言語をSCADAシステムが理解できる言語に翻訳します。 イーサネット/ RS-485コンバーターは、TCP / IPパケットをRS-485の物理環境を通過するパケットに変換するために使用されます。
このスキームには、いくつかの欠点があります。
- たとえば、200ミリ秒の応答を待つOPCサーバーのタイムアウトを設定します。 理想的なケースでは、パケットが遅延なくイーサネットに送られると、デバイスとの通信は適切な速度(強度)で進みます。 ただし、応答を含むパケットが300ミリ秒(200ミリ秒の応答タイムアウトを超える)遅延する場合、OPCサーバーは要求への応答が到着していないと見なし、次の要求を送信します。 この時点で、前のリクエストに対する回答が到着しますが、OPCサーバーはこれが現在のリクエストに対する回答であると判断し、不正なデータをトップに送信します。 その結果、ワークステーション上のデータは「ジャンプ」します。 このような状況から逃れるために、タイムアウトをさらに設定します。 3000 msのマージンで撮影してください。 回答が3000ミリ秒よりも早く到着した場合、残りの時間を待たずに次の要求に進みます。 これまでのところ、すべてが順調に進んでいますが、いくつかのデバイスが応答を停止するとすぐに、各デバイスに対して3000ミリ秒の遅延が生成されます。 ポーリング時間が増加しています。
- 産業用制御システム(Modbus、電気メーター)で使用されるプロトコルのほとんどは、同じパラメーターの連続ポーリングに基づいています。 ほとんどの場合、パラメータ値は変更されないままであるため、データネットワークを使用して同じ値を送信します。 伝送媒体がGPRSであり、トラフィックにお金がかかる場合、これは非合理的です。 さらに、GPRS伝送媒体では、パケット遅延が数秒に達する可能性があります。 同じものを転送する時間とリソースを無駄にするのはなぜですか?
上記の状況では、データは変更によって(散発的に)上方に送信され、複数の値によって1つのTCPパケットにグループ化されるプロトコルがより適しています。 そのようなプロトコルは、IEC-60870-5-104およびOPC UAです。 ModBus-TCPも適しています。変更送信はありませんが、データがあまりない場合は、1つのパッケージにパッケージ化できます。 DINレールに吊るし、RS-485を介してデバイスを接続し、イーサネットを介してSCADAシステムにデータを転送することができる何らかの種類のコントローラーがあれば良いと思います。
一般的に、かなりの数のハードウェアゲートウェイがあります。 しかし、既成の分割不可能なソリューションの形で。 すべてを1つに。 そして、私はそれが本当に好きではありません。 かつて、6つのRS-485ポートと2つのイーサネットを備えたSET-4TMメーターのプロトコルをOPC UAに変換するゲートウェイが必要でした。 あるメーカーには必要な通信プロトコルをサポートするゲートウェイがありますが、RS-485ポートはほとんどなく、他のメーカーには適切な数のRS-485ポートがありますが、イーサネットポートは2つありません。 3番目には2つのイーサネットポートがありますが、すべての通信プロトコルではありません。 4番目のものにはほとんどすべてのものがありますが、IEC-60870-5-104で使用可能なOPC UAはなく、ModBus-TCPはこれらのプロトコルにOPCサーバーを必要とします。
そして、それがいかにすばらしいか:あるメーカーからOSを搭載したコントローラーまたはミニPCを購入することです。 別のコントローラ用のソフトウェアを購入します。 あるソフトウェア製造元が何かをサポートしていない場合、別のソフトウェア製造元からソフトウェアを購入し、標準のソフトウェアインターフェイスを介してソフトウェアコンポーネントを組み合わせます。 ここは明るい未来のようです!
プロトコルゲートウェイは、コンポーネントに分割できないため、OPCサーバーおよびイーサネットからRS-485へのコンバーターバンドルよりも使用頻度が低いのはこのためです。
Linux版SCADAが未開発の理由の1つは、SCADAがあり、その中でサポートされている交換プロトコルがほとんどなく、機器と通信するためのOPCサーバーがないことです。 SCADAは、インテグレータをハードウェアと1対1のままにします。
読者はすでに質問をするかもしれません:あなたは何を提供できますか? すでに何がありますか? 次のプロトコル用のLinux用のOPC UAサーバーがあります。
- IEC 60870-5-104;
- IEC 60870-5-101;
- カウンターMercury 230、231、233、234、236 ;
- カウンター-4、-3、-4 ;
- エネルギーメーター;
- SNMP
- MQTT ;
- カウンターマーキュリー200
OPC UAプロトコルだけでなく、上位レベルにデータを送信するために、「 OPC UAからModbusへの変換およびIEC 60870-5-104 」が作成されました。 これらのプロトコルのデータ転送機能に加えて、「コンバーター」にはWebサーバーが組み込まれています。 特別なエディターを使用して、ダイアグラムを描画し、その上にタグ値を表示してから、ブラウザーで開くことができます。 コントローラーでミニSCADAが直接判明します。 回路のアニメーションがどのように機能するか、私はすでにここで、エディタについてここで書いた 。 将来、「OPC UA to MQTT Converter」が計画されています。
OPC UAサーバーとコンバーターは、x64、ARMv7、およびAARCH64アーキテクチャで動作します。
したがって、ハードウェアには、ミニ産業用コンピューターに基づいた実績のあるソリューションと、すべての種類の「ラズベリーpi互換」ARMミニコンピューターの両方を使用できます。 サンプルを使用してソフトウェアをインストールおよび構成する方法については、 こちらまたはこちらをご覧ください 。
一般に、複合体の構造は次のようになります。
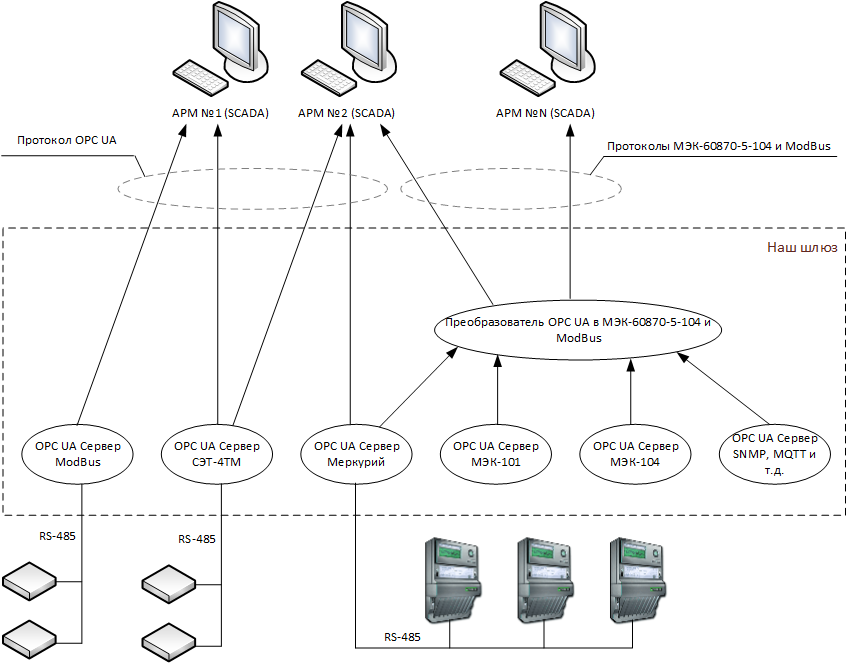
システムはスケーラブルです。 現在の問題の解決にのみ必要なコンポーネントが使用されます。
OPC UAサーバーを使用して、スキームが変換されます。
次のものがあります。
- OPC UAサーバーは、要求間の大きな遅延なしにRS-485を介してデバイスからデータを収集します。
- SCADAのデータは、変更のために1つのTCPパケットで複数の部分に分けて発行されます。
- 同等に構成された複数のワークステーションをOPC UAサーバーに接続できます。 複製が必要な場合に便利です。
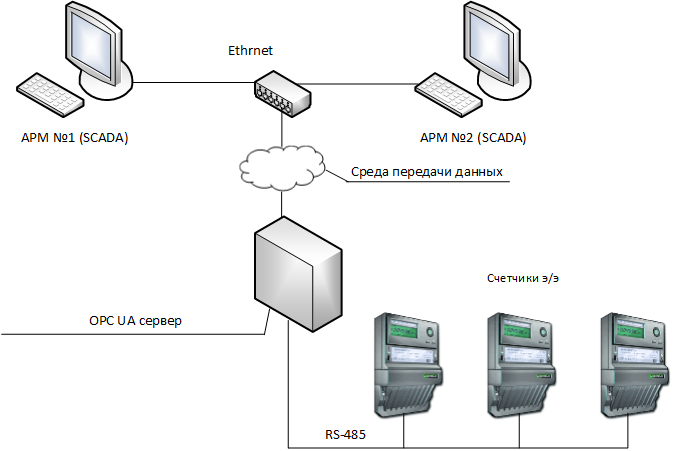
したがって、OPCサーバーと「Ethernet to RS-485 Converter」を接続する代わりに、それらの機能を組み合わせた1つのデバイスを取得します。 私はこのスキームがより好きです。 あなたはどうですか?