
出所
レースフォーミュラ
一般に、月の研究は4つの段階に分けることができます。 歴史的に、最初のミッションは月を過ぎて飛行するか、その表面で装置を壊すことでしたが、惑星間ステーションが短期間月のために働いていたため、今では非合理的です。 ただし、地球を離れるミッションは、火星への途中など、月を過ぎて飛行しているときに機器をオンにすることができます。
NASAの画像、木星に飛ぶGALILEOプローブの合成写真
最初の本格的なステージは、月の軌道の探査機です。 月の重力場の不均一性のために、何年も働くことができる少数の安定した軌道しかないため、これは非常に単純ではありません。 このレベルでは、国家の名声の問題を解決し、過去の成果を繰り返すだけでなく、月をさまざまな範囲でスキャンすることで有用な科学データを収集することもすでに可能です。
2番目の段階はソフトランディングです。 ここでは、タスクは少なくとも1.68 km / sの速度(低軌道から)を消す必要があるため複雑になりますが、科学データはさまざまな地質によって補完され、誰もまだ訪れていない興味深い場所をいつでも選択できます。 着陸ステーションは月面探査機で補うことができ、これにより科学データの量と全世界で見られる美しい写真の数の両方が劇的に拡大します。
3番目の段階は、サンプルの返却です。 エンジニアリングの課題は、月からの打ち上げ、ナビゲーション、家に帰る目的の問題、および既に地球に既に着陸している問題を解決する必要性によって補完されます。 しかし、持ち込まれたサンプルは科学者に喜ばれ、博物館での展示という形で国の成功の非常に明確な証拠があるでしょう。
4番目の段階は有人プログラムです。 もちろん、グローバルな意味で、いつか人類は継続的に宇宙に住み始めますが、これまでのところ、有人月計画は非常に高価であり、地球の最大の経済または多くの国の共同作業にのみアクセス可能です。
開始する
新しい月のレースのすべての参加者はほぼ同時に始まりました。 正式にはもちろん、1990年の日本の2つの衛星ミッション-ひたんと羽衣のミッションがありましたが、次の飛行まで17年間の休憩があったため、シーケンシャルプログラムの一部としてカウントできませんでした。 それにもかかわらず、日本人が最初に飛んだのは驚くことではありません。 2007年9月14日、3つの衛星が月に行きました-大きな「かぐや」と2つの小さな衛星-オキンとオウナ。

かぐやが小型衛星を分離、JAXA画像
「かぐや」は、カメラ、分光計、レーダー、レーザー高度計、プラズマ検出器など13台の機器を持ち歩いていました。 2つの小さな衛星が無線バンドを使用しました:Okinはリピーターとして働き、ドップラー効果を使用して月の重力場を測定しました、Ounaはドップラー効果が月の四肢の近くで機能しなかったため、同じ目的で超長基の干渉計を使用しました(プローブは横に移動し、地上の観測者に比べて加速/減速されていない)。
日本の「トライアド」の仕事の結果、私たちは多くの興味深いことを学びました。 まず第一に、科学者の仮定に反して、月面上の点は常に照らされていませんでした。 北極の地域では、最大照度は89%、南は86%でした。 これにより、周極着陸ステーションまたは月面基地の設計に特定の要件が課せられます。常に明るい場所があれば、バッテリーを必要とせずにソーラーパネルを展開することが可能になります。 しかし、一定の影のゾーンが豊富に見つかりました。これは良いことです。なぜなら、そこは寒く、何らかの形で水氷があるからです。
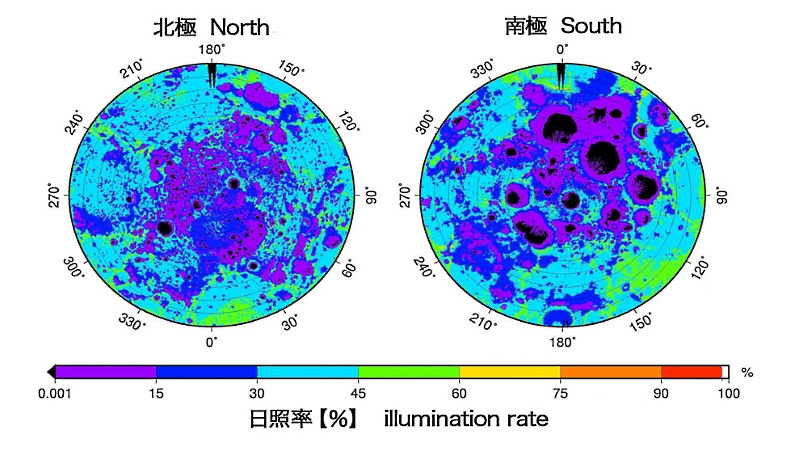
ポールイルミネーションマップ、JAXA画像
残念ながら、氷の表面で検出することはできませんでした-シャクルトンクレーターを覗く非常に敏感なカメラは、輝きに気づきませんでした。
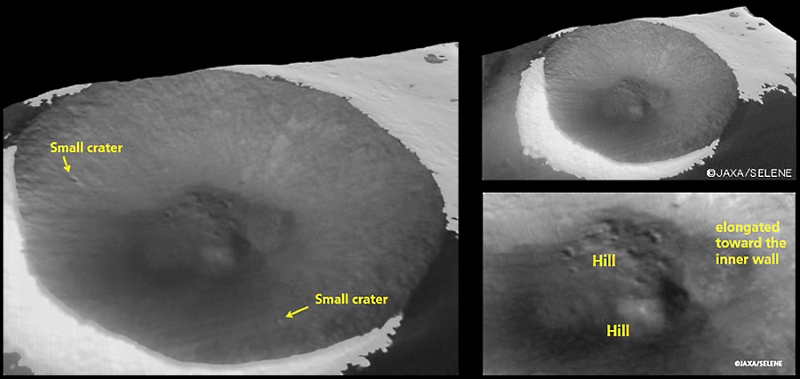
シャクルトンクレーターの写真、JAXA画像
さらに、月とその重力異常の非常に詳細な地図が編集され、月の海の玄武岩とレゴリスの層とティコクレーターの斜長岩の層が発見されました。
1ヵ月後、10月22日に中国のChang'e-1が月(月の女神にちなんで命名)に行きました。 エンジニアリングプロジェクトは何年も続くので、これは作業が同時に行われたことを意味し、すでに「人種」について話すことができます。 中国の装置は少し軽量でしたが(2.3トン対2.9カギ)、カメラ、分光計、放射計、粒子検出器、レーザー高度計などの24のデバイスを搭載していました。

Chang'e 1 Layout、写真:香港科学博物館
装置の結果は、当時の月の最高品質の地図と、化学元素の分布に関する多くのデータでした。

鉄の分布、左のb点はChang'e-1データ、右は1994年のアメリカのクレメンタイン、 ソース
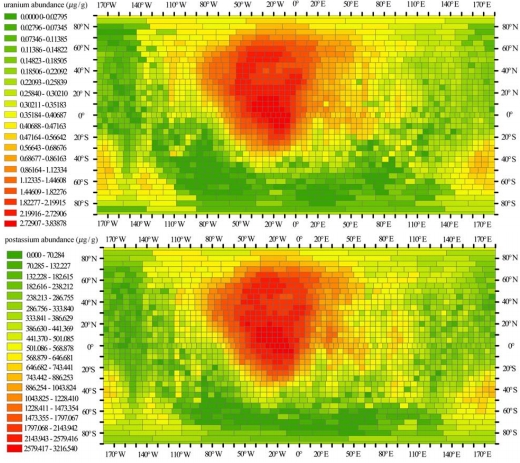
月、 ソース上のウラン(上記)およびカリウムの分布
1年後の2008年10月21日(これは作業が並行して行われたことも意味します)、侵略者のいるインドの探査機チャンドラヤン-1が月に飛びました。 彼は最軽量(1.3トン)でしたが、最大のニュースメーカーになりました。 彼によると、月面に水の存在が確認されました。 そして、2つの方法で一度に-軌道装置と貫通体から。 衛星に搭載された11の科学機器の1つはアメリカの月鉱物マッパーで、月の水(青)と鉄(赤)の分布の地図を受け取りました。
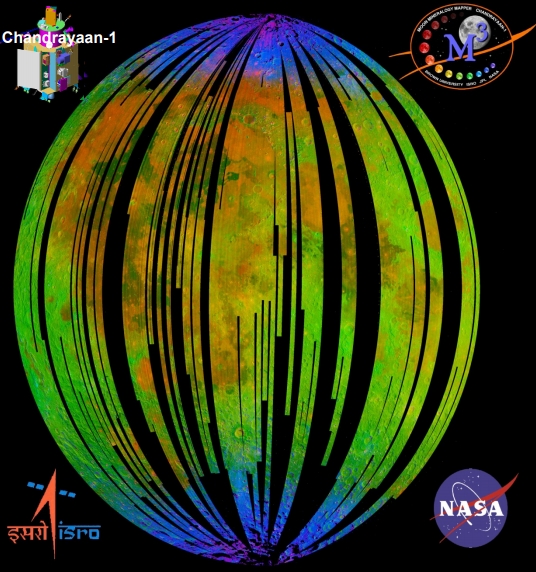
水と鉄の分布、画像ISRO / NASA
また、ペネトレーターには非常に感度の高い分光計があり、減少中に月の近くの空間に水分子が存在することを記録しました。
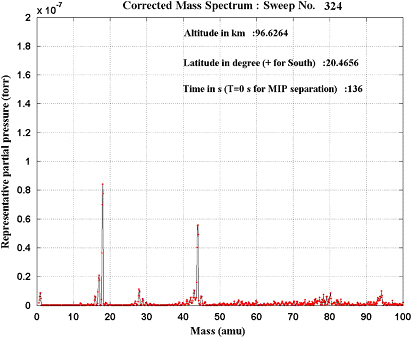
18で最も高いピークは水です。 画像ISRO
さらに、この装置は、レゴリスが太陽風をほぼ完全に吸収するという広範な信念に反論した。 実際には、20%が反映されていることが判明しました。
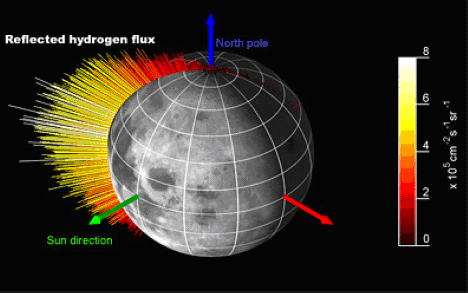
太陽風反射分布、ISRO画像
最初の波の3つの装置はすべて2009年に作業を完了しました。日本と中国は着実に軌道から外されましたが、インドの装置は故障し、まだ月の周りを回転しています。
中国は前進している
2000年代の終わりに、日本はアジアの月のレースの最もありそうなリーダーと見なされました。 しかし、実際には、中国であることが判明しました。 すでに2010年10月1日、Chang'e-2は出発しました。これは、NASAまたはESAと同等の期間と複雑さでした。 月の軌道で2011年の夏まで働いていたプローブは、月の向こう側にあるL 2地球-月の周りのハロー軌道に切り替え、小惑星(4179)タウタティスに行き、遠距離通信を行い、長期的な機能をチェックするための装置になりました惑星間ステーション-それは月より数百回遠くに飛び去り、まだ働いています。

Chang-2の主なタスクは、詳細な地図を作成し、将来の着陸の場所を選択することでした。 これを行うために、彼はわずか15 kmのペリセンター(下部)で軌道に移されました。 これにより、1ピクセルあたり7メートルの解像度で表面全体のステレオスコピックマップを取得し、1.3メートルの解像度で個々の画像を取得することができました。これは、メインプログラムの後に特別な低軌道に転送された現在の記録保持者であるNASA LROよりもわずか5倍劣っています。

中国宇宙機関による写真

小惑星タウタティス。 新華写真/ CAS
2013年、中国は第2段階であるソフトランディングを無事に完了しました。 Yutu月面ローバーを備えたChang'e-3装置は、計画エリアに比べて不足しているものの、12月14日に着陸に成功しました。

着陸ステップ、中国宇宙機関の写真

ルノホッド、中国の宇宙機関の写真
月面探査機は31か月間動作しました(2番目に移動する能力が失われた場合でも)が、着陸ステーションは引き続き機能します(夏には信号が記録されました)。 月面に初めて長期観測所が現れました。 この研究の結果は、地質学、天体観測、そしてもちろん、月の表面に描かれた中国の国旗の誇り高い写真に関するデータでした。

着陸地点の土壌構造、GPRデータ、CAS画像

極端紫外域の地球のプラズマ球、CAS画像
並行して、中国は次のステップである月の土壌サンプルの返還の準備を始めました。 これを行うために、2014年10月23日に、Chang'e-5T1テストベンチが月に打ち上げられ、2番目の宇宙速度で帰還する宇宙船の地球へのソフトランディングの技術的ソリューションをテストしました。

着陸後の着陸機
今日と明日
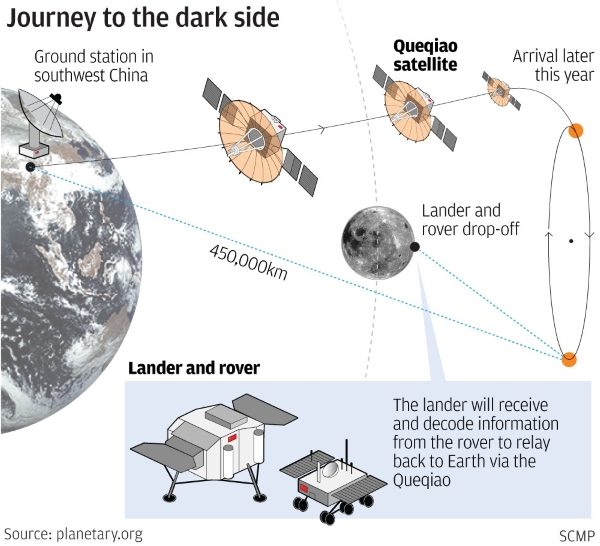
中国には、第2の予備として、Chang'e-3が故障した場合の着陸ステージと月面ローバーのセットがありました。 ミッションが成功したので、次のタスクは複雑化する意味がありました。 したがって、彼らは月の向こう側に4番目の装置を送ることに決めました。 しかし、このためにはリピーターが必要です-裏面に直接連絡することは不可能です。 ラグランジュ点L 2を含むChang'e-2の実験は、以下を含めて実行されました。したがって、リピーターにとって、これは非常に便利な軌道です。
惑星社会のイメージ
2018年5月20日、ケチャオ宇宙船は月に向けて出発しました。 名前(「マグパイブリッジ」)は、 中国の伝説に由来し、年に1度、恋人同士を結ぶ天の川を渡る鳥の橋です。 その主な仕事は裏面の中継器になることですが、科学機器も設置されています-オランダの低周波電波望遠鏡です。 Queqiaoと一緒に、2つの45ポンドの衛星Longjiang-1およびLong-2が飛行しました。 残念ながら、1つが故障して月の周りの軌道に入ることができませんでしたが、2つ目は正常に機能し、電波範囲の空を監視して写真を撮ります。サウジアラビア製のカメラがあります。

Queqiaoレイアウト、 ソース

龍江2号からの月の景色、CNSA写真
そして、2018年12月7日、Chang'e-4が飛行しましたが、これは南極点-エイトケン盆地に着陸する必要があります。 その設計はChang'e 3に非常に似ていますが、違いがあります。 彼らは着陸プラットフォームから紫外線望遠鏡を取り外しましたが、2番目のカメラ、中性子線量計、低周波分光計(太陽フレアの研究用)、および昆虫の種と卵を入れた3 kgのコンテナを設置しました。 マニピュレーターはローバーから取り外されましたが、放射性同位体ヒーター(現在の予想寿命は3か月)、VINS分光計、およびスウェーデンのASAN中性粒子分析装置が設置されました。 月面探査車にはジオレーダーが残っていたため、数十メートル下の土壌の構造が写真に追加されます。
打ち上げは成功し、デバイスは今月に向かっています。 軌道は非常に良好であるため、土曜日の最初の修正はキャンセルされました。 2回目の修正は日曜日に行われました。 最初にデバイスが月の周りの軌道に入り、しばらくそこに留まり、システムをチェックして月の準備をするため、着陸は2019年初めに予定されています。
さて、アジアの月のレースに戻ると、2019年にはさらに2つのイベントが予定されていることに注意してください。 1月31日に、オービターからのインドミッションChandrayan-2の打ち上げと月面探査機による着陸が計画されています。 また、2019年12月には、中国の最初の月の土の運搬ミッションであるChang'e-5が飛行します。