
こんにちは
私は測量士です。CROCの同僚から、ドローンの改造方法、フライトのプログラム方法、後からすべてを処理する方法、ドローンから撮影した画像を詳細なオルソフォトマップ、高精度の3次元地形モデル、1:500-1の地形図に変換する方法について尋ねられました:10,000。
私のチームと私はいくつかの異なるドローンを試し、最終的にいくつかの修正を加えた「主力」のDJI Phantom 4 PROに落ち着きました。 私たちが最初に行った最も重要なことは、測地用のGNSS受信機を装備することでした。これにより、写真の中心をセンチメートルの精度で決定できます。
標準のGPSは15〜20メートルの精度を提供しました。 このような精度で測地問題を解決するには、地面に特別な十字架、または既知の座標で紙皿をレイアウトするような他の種類の歪みが必要です。

私たちはそれをより簡単で複雑にします:正確に既知の座標を持つ地上ベースの基地局を置き、追加のGNSS受信機をドローンに統合し、外部アンテナを設置します。 たとえば、DJ-RTKに搭載されたDJIシステムを搭載したMATRICE 600から始めましたが、これは非常に扱いにくく、高価で、測地作業の解決には不便でした。
次に、よりコンパクトなDJI PHANTOM 4 PROを作り直しました。追加のGNSS機器を標準パッケージに統合することができました。 ドローンの総質量は約100グラム増加しました。 飛行時間はわずかに損傷しましたが、重要ではありません。200〜300 haの調査を完了するには、4個のバッテリーで十分です。
ファントムは重要な機会を与えてくれました-メインセットは旅客機の手荷物に収まり始めました。 つまり、今では非常に簡単な場所ですべての機器を持ち運ぶことができます。
最小限のセットは、修正されたドローン(セット全体)、地上ベースの基地局としての測地GNSS受信機、飛行計画プログラムを備えたラップトップ、ダウンロードされたマップ(インターネットなしで作業する場合)、およびそのような機会が事前にあった場合はポイントに規定された飛行計画です。 追加のバッテリー、充電器(または複数)、ジェネレーターが必要です。 私たちは、ケースの形で作られたガソリン発電機を取ります。それは私たちのニーズに非常に便利です。 または、車のエンジンで駆動するインバーター。 一部の地域では、より多くの加熱が必要です(特に、バッテリーと手のため)。
1つのバッテリーから、ピクセルあたり2〜5センチメートルの解像度で50ヘクタールを撮影できます。
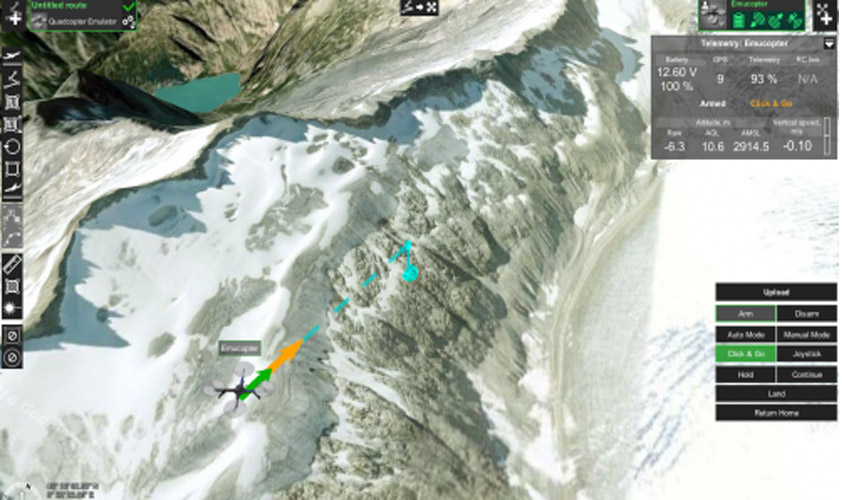
私たちは次のように働きます:ドローンのために事前に(オフィスで)詳述されたタスクのある場所に到着します。 私たちはUgCSを使用しています(これはロシアでCROCの統合と改善を販売およびアドバイスするプロの非常に高価なドローン飛行計画ソフトウェアです。もちろん、そのようなソフトウェアは測地学だけでなく、救助者、農学者、建設業者などによって使用できます。しかし、私はこれらの分野には強くないので、すべての質問はCROCの同僚にあります)。 その中で、作業領域の境界、横方向の重なり、撮影の高さを示し、ソフトウェア自体が地形の特徴を考慮してドローンの飛行ルートを計算します。 つまり、UgCSは必要に応じてすべてをカットします。中間着陸でバッテリーと残りを交換します。
不明な障害物があるかどうかを確認してから、GNSS基地局をセットアップします。 地上点の座標は、Topcon GR-5受信機によって指定されます。

さらに、すでに飛行任務があります。 フライバイゾーンの境界と、接着の縦方向または横方向のオーバーラップを次に示します。 制御のために一対の制御コントラストポイントを配置します。

GNSSから自動操縦装置を接続するには、ドローンをリモコンに接続し、リモコンをDJI制御プログラムを備えたタブレットに接続してから、タブレットをラップトップに接続します。 外出先でこのバンドルを設定するのは簡単ではありません。 ここで、CROCの同僚は、打ち上げ前にインストール、調整、テストを行うのに非常に役立ちました。
次のポイントは、安定したインターネットアクセスがない場所に、ほぼ3つおきのオブジェクトがあることです。 ソフトウェアはこれに対処します。 しかし、信号伝搬の問題がすでに始まっている山などの難しいセクションもあります。 そのため、Phantomsを使用します。Phantomsには、障害物を避けるために多くのセンサーが組み込まれています。 彼が接触を失うと、彼は戻ります。 彼が戻れないとき、彼は座り始めます。 また、これらのセンサーは、高地や都市などの困難な状況で飛行するのに役立ちます。 障害物センサーが緊急事態の回避に役立ついくつかのケースがありました。 たとえば、フジャイラ首長国(UAE)の山では、無人機との接触を失い、風のため、無人機は離陸地点に戻ることができませんでした。 その後、自動操縦装置は着陸することを決定し、障害物センサーを使用して、比較的平坦な地域の山岳地帯の2つの斜面の間の隙間にドローンを着陸させました。
ドローンの飛行の結果は、これらのポイントで写真になります(処理用のこのソフトウェアはすでに彼らのセンターを強調しています):
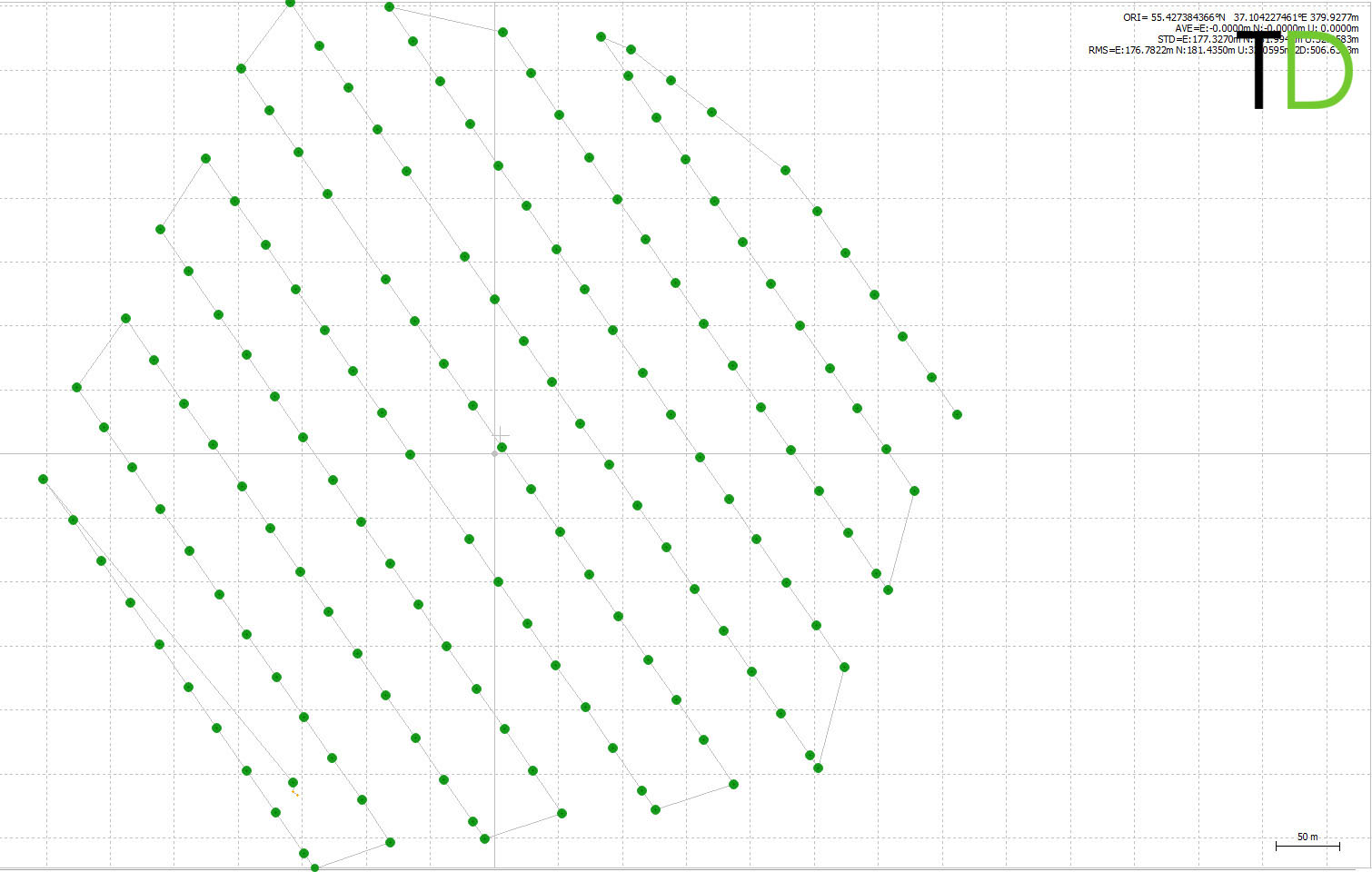
GNSSの測定値は、フライトの完了後にWi-Fi経由で個別にダウンロードされ、ドローンに保存され、リアルタイムで地上にブロードキャストされません。
次のステップは航空写真の写真測量処理であるため、さらに先へ進むことができます。 地上制御点の座標は、制御にのみ使用されます。

これが分類後の点群です。 この色は、植生、支柱、送電線、建物、構造物を強調しています。
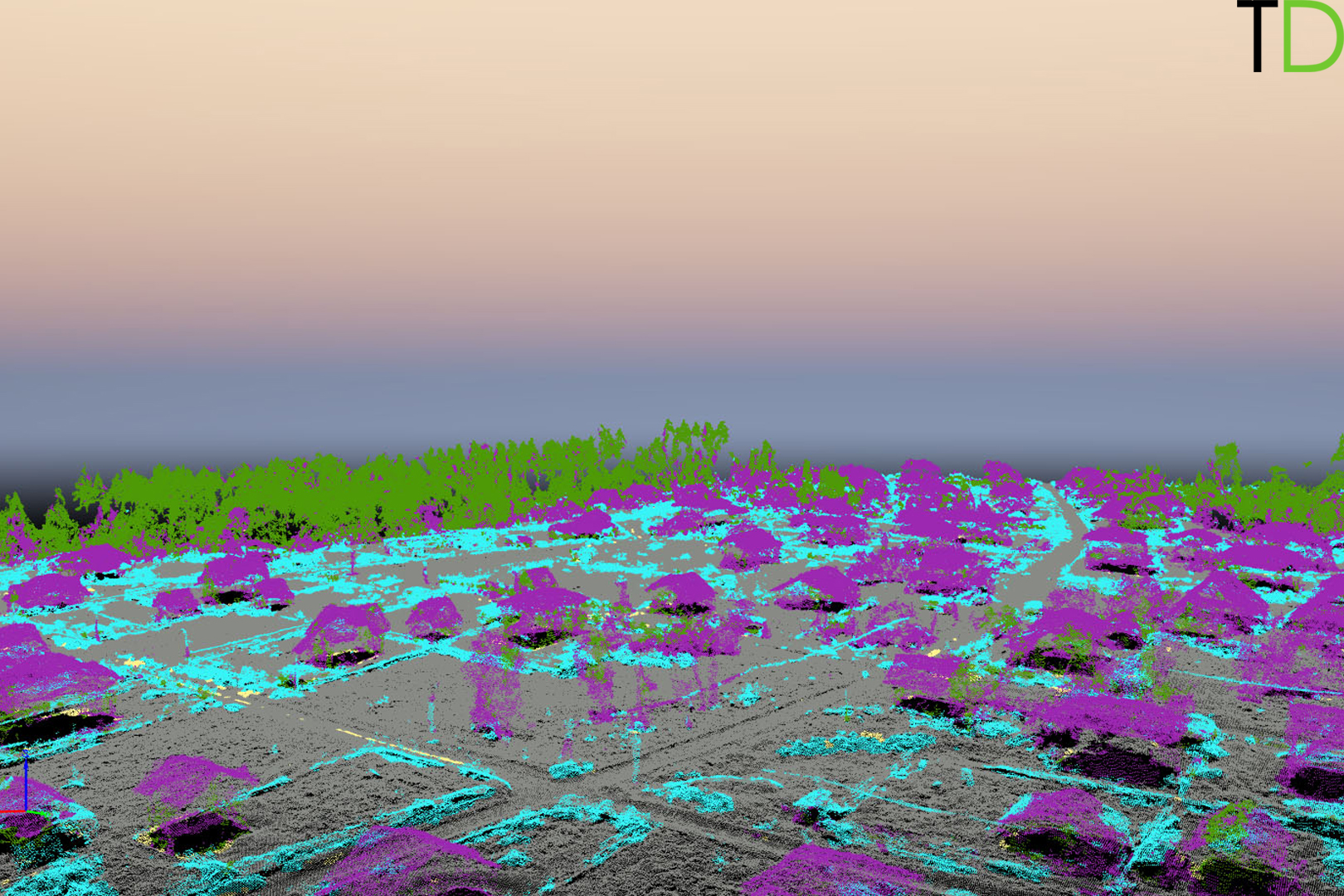
そして、これはすでにこのクラウドの3Dモデルです。

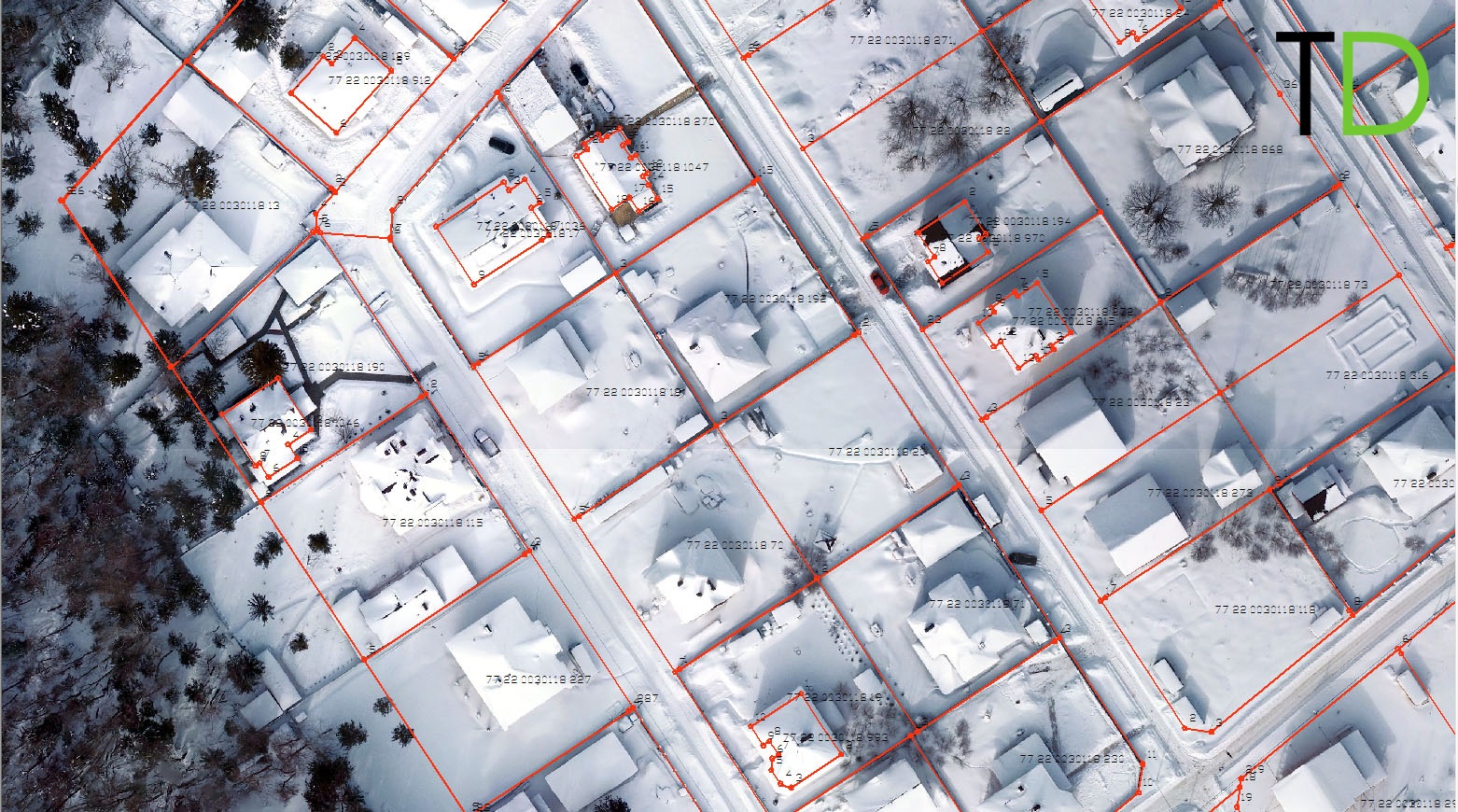
このコテージの村では、タスクは簡単でした。ピクセルあたり5 cm、シンプルな風景、最小限の木、干渉なし。 オルソフォトマップを受け取り、地籍図と組み合わせました。
土地調査、土地区画の目録および地籍評価、土地利用の有効性の評価、領土開発の設計、設計および調査作業、道路網の再構築および開発、地上および地下通信、パイプライン、電力線などの状態の監視に使用できます。保護を目的とした土地監視、変化の対象となる土地の境界および地域の環境監視、GISの3次元地形モデルの作成。
なぜUgCSなのか? 市場には他の選択肢がないため、他のすべてはアマチュアレベルです。 任意のドローンをミッションに投入できるのは非常に便利で、飛行するだけです。Mavikiや測地学で人気のあるドローンなど、DJIライン全体がサポートされています。 鉄との結合はまったくありません。 非常に良い計画-オフィスから。 ジョイスティックまたはCLICK&GOを使用したラップトップからの通常の制御、PhotoscanまたはPix4Dの画像の優れたジオコーディング。 ラップトップを持ち歩く必要はありませんが、機能がはるかに少ない代替ソフトウェアが市場に出回っています。 ラップトップは大きな利点ですが、システムの呪いでもあります:それは出張を非常に複雑にします。 冬には、バンドル全体のバッテリーが凍結するため、これはすべてさらに複雑になり、手袋を使用する必要があります(あまり正確ではありません)。 しかし、他のオプションはまだありません:そのような不便さ、または限られた機能。
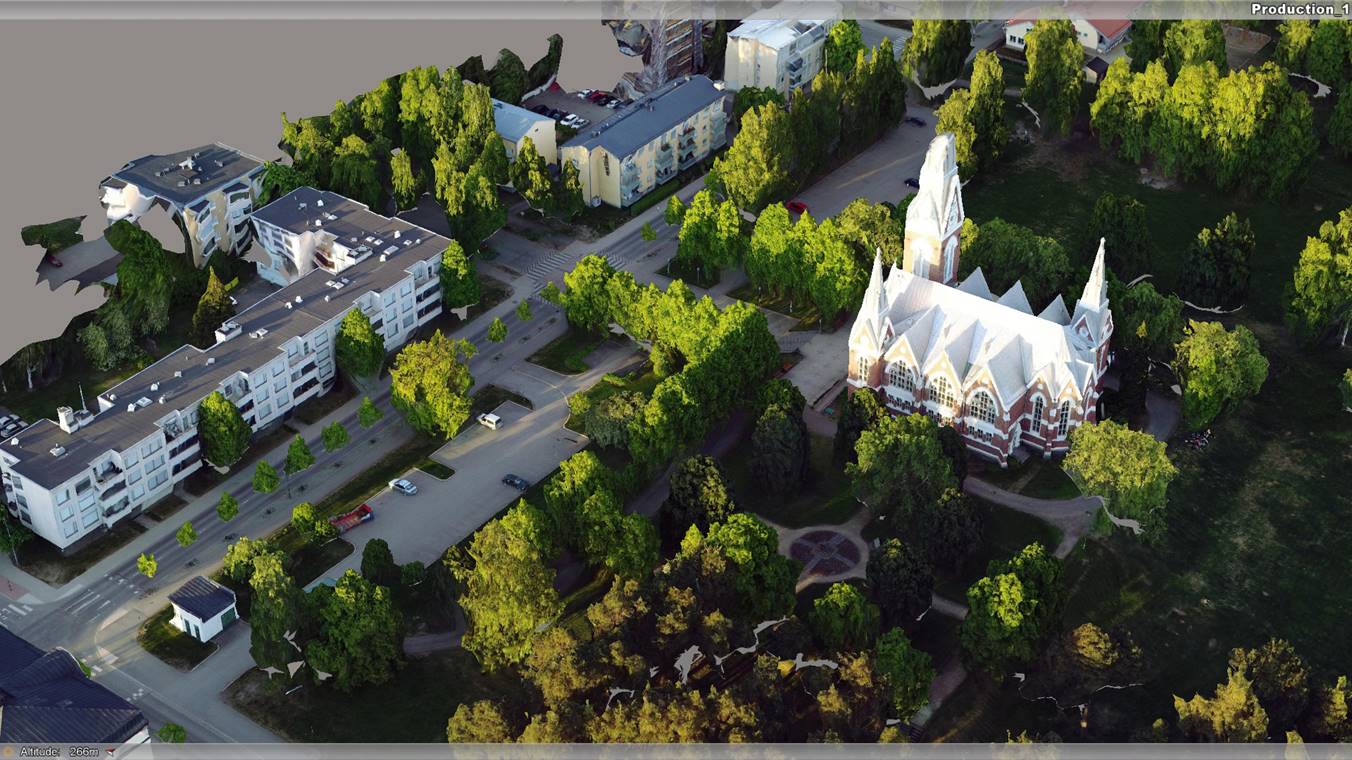
3次元都市モデルの結果の例を次に示します。
ここに別のオブジェクトがあります-三次元採石モデル:


ここに物語があります。
参照資料
- ドローンとクラッシュの装備に関する私のブログ
- UgCS WebサイトはSPH Engineeringのベンダーです。 複雑で長いミッションのプランナー。
- CROCの同僚のメール-ALevandovskiy@croc.ru(Alexander Lewandovsky)-ソフトウェアに関する質問。
- 飛んだ幻影
- GNSS RTKとは何ですか?