 今年の1月にLittleFSファイルシステム(arm mbed osに統合)に関する資料を書いたとき、任意のSTM32マイクロコントローラー用のarm mbed osを使用したプロジェクトの作成をできるだけ早く説明することを約束しました。 ご存知のように、 ARMのオンラインIDE (または専用のArm mbed部門)は、まず厳密に定義されたデバッグボードの数をサポートしますが、その数は少ないです。 第二に、最も有名なIDEであるARM 、 uVision KEIL 、およびIARのみを対象に、プロジェクトの一部を構築できるオンラインの例をエクスポートします。 さらに、一部の例はまったくエクスポートされません。 つまり、 IARのオプションのみがエクスポートに使用可能、またはKEILのみに使用可能などです。 そのため、当時考えられていたように、アームmbed osをMKに「固定」することを学ぶことは、まったく場違いではありません。
今年の1月にLittleFSファイルシステム(arm mbed osに統合)に関する資料を書いたとき、任意のSTM32マイクロコントローラー用のarm mbed osを使用したプロジェクトの作成をできるだけ早く説明することを約束しました。 ご存知のように、 ARMのオンラインIDE (または専用のArm mbed部門)は、まず厳密に定義されたデバッグボードの数をサポートしますが、その数は少ないです。 第二に、最も有名なIDEであるARM 、 uVision KEIL 、およびIARのみを対象に、プロジェクトの一部を構築できるオンラインの例をエクスポートします。 さらに、一部の例はまったくエクスポートされません。 つまり、 IARのオプションのみがエクスポートに使用可能、またはKEILのみに使用可能などです。 そのため、当時考えられていたように、アームmbed osをMKに「固定」することを学ぶことは、まったく場違いではありません。
しかし、人生はどんな計画に対しても独自の調整を行い、長い間この方向に取り組むことは不可能でした。 しかし、質問は未解決のままであり、今、かなりの時間の後、私は主題に戻ります。
いずれにせよ、1つの重要な質問が未解決のままでした。 私たちは皆、異なるIDEとさまざまなツールチェーンを使用しています。 移植プロセスは非常に複雑で、タンバリンとの特定のダンスが必要です。 たとえば、 GCCのアセンブラーはx86構文( AT&Tがあります )をサポートしていないため、プログラマーがここで最初に直面する最も基本的な問題は、Arm mbedオペレーティングシステムのソースコードでのアセンブラー挿入に対する同じGCCコンパイラーの乱用です。
誰かがIARを使用し、誰かがuVisionを使用し、誰かがSublime Textで書き込み、そして誰か(私のような)がCode :: Blocksを使用します 。 誰かがWindowsを使用し、誰かがLinuxを使用します。 広大さを把握し、理解できないものを受け入れることはできません。同時に、オプションを考慮せずに残すことは、観客の一部を残すことです。
解決策は突然現れ、非常にシンプルで普遍的なものになりました。
PlatformIO IDE。
PlatformIOは、Pythonで記述されたクロスプラットフォームツールチェーンであり、ユーザーのマシンに存在することがおそらく唯一の前提条件です(バージョン2.7以上)。
そのパフォーマンスと使用したツールによると、 PlatformIOは 、数年前にリリースされたIDE MicroEJ Studioを思い出しました。このリリースでは、Javaでマイクロコントローラーのコードを書くことができました。 その後、MicroJVM(Cで記述)がMKに注がれ、その中でコードが実行されました。 しかし、媒体は広く配布されず、大衆に行きませんでした。
PlatformIOは、多くの広範なIDEおよびコードエディターの一部として使用できます。
- アトム
- クライオン
- 日食
- Emacs
- NetBeans
- Qt Creator ;
- 崇高なテキスト
- VIM
- Visual Studio
- VSCodeなど
PlatformIOの主な機能は、構成ファイル「platformio.ini」の使用です。これは、プロジェクトのターゲットプラットフォームを決定し、この構成ファイルにある記述に従ってライブラリをロードし、依存関係を構築するために使用されます。
主な要素はPlatformIO IDEとPlatformIO Coreです。
2016年、 PlatformIOは2016 IoT Awardsで「Best IoT Software&Tools」にノミネートされました。
これは一般的な概要です。 詳細なドキュメントは、platformio.orgプロジェクトのWebサイトとドキュメントのセクションにあります。
私たちのタスクは、必要な開発ツールを確立し、プロジェクトを作成し、その中で何かをすることです。
アトムvs. VSコード
ホームページには、 AtomとVS Codeの 2つのエディターがダウンロード用に提供されています。 両方試してみましたが、すぐに言います。VSCodeの方が便利です。 コードに基本的な遷移があるためだけの場合。 今後の展望を述べます。ライブラリとソースコードのプロジェクトでは、表示されないarm mbed osはすべてローカルリポジトリにあるため、 main.cppと、プロジェクトツリーで作成する他のすべてのもののみです。 したがって、いくつかの宣言、クラスとそのオブジェクト、クラスインターフェイスを100%監視する必要があります。 しかし、 Atomはそのような機会を提供しません! また、 Atomを使用する場合は、mbed osドキュメントに満足するだけで済みます。 同意します、これは不便です。
そのため、 VS Codeに適用されるプロセスをさらに調べます 。 次の手順を実行する必要があります。
- VS Codeをインストールします。
- PlatformIO IDEをインストールします。
- udevルールを設定します(Linuxユーザーの場合)-必要ではないかもしれませんが、後で椅子にバウンスしないように、予防的なストライキを行います。
- プロジェクトを作成し、その中に最小限の機能を含めます。 ボード上でアセンブル、ロード、デバッグされていることを確認してください(OCD / GDBがサーバーとして使用されます)。
リンクをクリックし、目的のシステムのインストーラーをダウンロードした後、 VS Codeをインストールします。
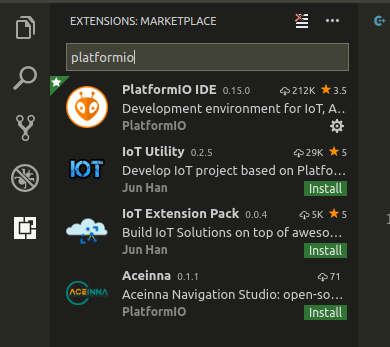
インストール後、エディターを起動し、拡張機能パネルを開き、検索に「platformio」と入力します。 最初のオプションは「 PlatformIO IDE 」をポップアップします。 「インストール」をクリックし、インストールが完了するのを待って、エディターを再起動します。
Linuxユーザーは、デバッガーが正常に動作するためのudevルールをすぐにインストールできます。 原則として、デバッガーの開始時に、ターミナルが「 リモート通信エラー。 ターゲットが切断されました。ピアによって接続がリセットされました。 」
ターミナルを開いて書き込みます:
sudo curl -fsSL https://raw.githubusercontent.com/platformio/platformio-core/develop/scripts/99-platformio-udev.rules > /etc/udev/rules.d/99-platformio-udev.rules
端末に「Permission denied」と表示されたら、 リンクからファイル「99-platformio-udev.rules」をダウンロードし、ファイルをetc / udevに強制的にコピーします。
sudo cp 99-platformio-udev.rules /etc/udev/rules.d/99-platformio-udev.rules
cpコマンドの後にファイルへのフルパスを指定する必要があることに注意してください。 .rulesファイルがフォルダーにある場合(「ダウンロード」など)、ターミナルコマンドは次のようになります。
sudo cp ~/Downloads/99-platformio-udev.rules /etc/udev/rules.d/99-platformio-udev.rules
次に行うこと:
sudo usermod -a -G dialout $USER sudo usermod -a -G plugdev $USER
ここで、 $ USERはユーザー名です。 たとえば、このサブディアがあります。
その後、発生する可能性がある場合、デバッガーのすべての問題を解決する必要があります。
環境およびローカルリポジトリarm mbed os
環境をインストールした後、ローカルarm mbed osリポジトリの場所(既に述べたように、プロジェクトツリーには表示されません)、すべてのmbed osソースの場所、およびコンパイルされたプロジェクトの保存場所を理解することは不要です。
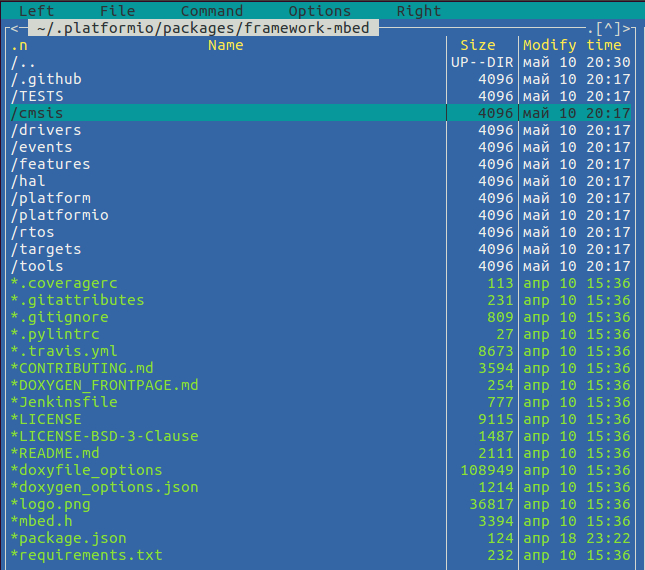
インストールプロセス中に、 platformIOは、パス$ HOME / .platformio / packagesに沿ってローカルarm mbedリポジトリー(およびそれだけではなく)をデプロイします。 ここでは、たとえば、arm mbed。
ファームウェアファイルとプリコンパイルされたソースは、プロジェクトフォルダーに直接配置されます。
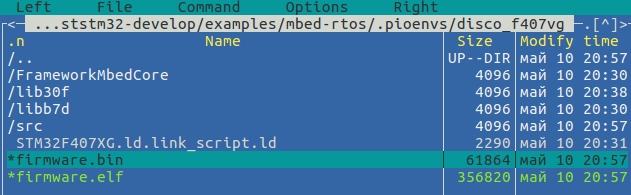
それが保存されている場所について知る必要があるのはそれだけです。 プロジェクトの作成に直接進みます。
プロジェクトを作成します。
作成中のプロジェクトについて簡単に説明します。 明らかな理由から、サポートされているARMオンラインIDEに含まれていないボード、つまりSTM32F4DISCOVERYのプロジェクトを作成することにしました。
組み込みシステムの世界では、点滅するLEDを使用したデモンストレーションプロジェクトを作成するのが一般的です。 私たちはこれをしません-それはすでに単純で面白くないです。 PlatformIOは 、 cmsis 、 hal 、 rtosなどのいくつかのタイプのプロジェクトを意味します。 現在arm mbed os、つまりオペレーティングシステムについて話しているので、 rtos専用のプロジェクトを作成します。
プロジェクトでは、3つのタスク(タスク)を作成して実行します:最初はfloat型の配列を乗算し(Cortex-M4Fプロセッサがあるため、FPUを使用します)、2番目のタスクは... LEDを点滅(=)し、3番目は決定しますCPU使用率
行きましょう。
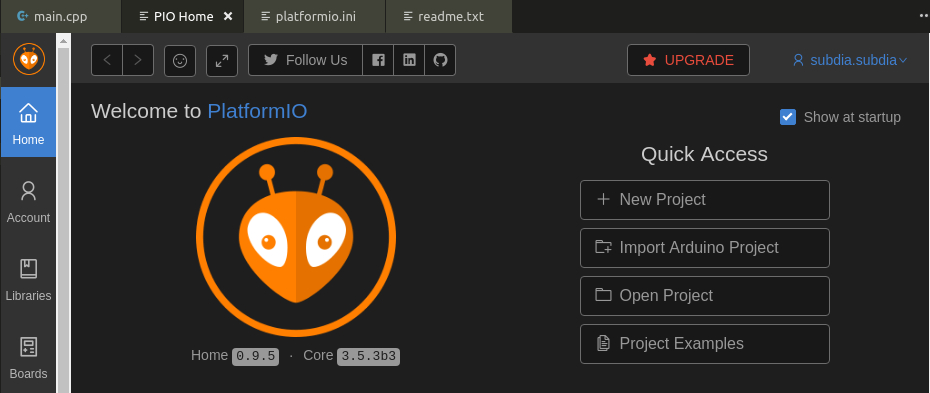
VS Codeを開きます 。 最初のステップは、 PIOホームウィンドウを開くことです。 「 新規プロジェクト 」を選択します。
「 プロジェクトウィザード 」ウィンドウで、プロジェクトの名前を指定し(「armmbed_F407_CPU_usage」にしてください)、「 ボード 」ドロップダウンリストでボードを選択します。 著作権ボード用のソフトウェアを作成するときに素材を使用することを計画している読者の場合:はい、特定のボードにバインドしますが、すべての脚と周辺機器を再構成できます。 次に、私はこれについていくつかの言葉を言いますが、急いで怒ってはいけません。 だから、 ボード 。

STM32F4DISCOVERYを選択し、「 フレームワーク 」ウィンドウに移動します。 ここにはいくつかのオプションがあります。

arm mbed osの使用に同意したため、ここでは「 mbed 」オプションを選択することは明らかです。 「 終了 」をクリックします-完了。 ウィザードは少し考えて、新しく作成したプロジェクトの空白を開きます。 それを見てください。
前述したように、プロジェクトにはデフォルトのフォルダーが2つしかありません。lib (空)とsrcで、単一のmain.cppファイルが含まれています。 ここではソースコード全体が表示されないことを思い出してください。 それでも、arm mbed osのすべての機能を使用できます。 rtosを使用するには、「 platformio.ini 」ファイルにビルドフラグを追加する必要があります。
build_flags =-DPIO_FRAMEWORK_MBED_RTOS_PRESENT
一般に、構成ファイルは個別に考慮する必要があります。 このアプローチは、 .cfg構成ファイルでTexas Instrumentsの TIRTOS / SYSBIOSを思い出しましたが、アームmbedではすべてがはるかに簡単です。 構成ファイルでは、ハードウェアリソースからフラグの作成とデバッグまで、多くを宣言できます。 たとえば、最も単純な構成ファイルの構成は次のとおりです。
[env:disco_f407vg] platform = ststm32 framework = mbed board = disco_f407vg
そして、これは最終形式の例の設定ファイルです:
[env:disco_f407vg] platform = ststm32 board = disco_f407vg framework = mbed build_flags = -DPIO_FRAMEWORK_MBED_RTOS_PRESENT -O1 -Wl,-u_printf_float -D std=gnu99 -fno-builtin-printf -fexceptions -fpermissive debug_flags = -D DEBUG=1 -DDEBUG_LEVEL=DEBUG_NONE monitor_baud = 115200
ですから、あなたの余暇に学ぶべきことがあります。
そのため、必要な形式でプロジェクトを導入し始めます。
コードをブロック単位で提供し、コードで何が起こっているのかを説明します。 開始するには、ソースにヘッダーファイル「 mbed.h 」と「 rtos.h 」を含める必要があります。 理由は明らかだと思います。
メイン関数は次の形式を取ります。
/**************************************************************************/ int main (void) { Thread thread0; Thread thread1; Thread thread2; Thread::attach_idle_hook (&sleeping_sun); thread0.start (&ledblink); thread1.start (&cpu_usage); thread2.start (&math_thread); while (true) { } } /**************************************************************************/
最初に、「 Thread 」クラスのオブジェクト、つまり本質的に、特定の機能を提供するタスク(Task、Thread)を作成します。
誰かが気付いた場合、次の行が表示されます
Thread::attach_idle_hook (&sleeping_sun);
これは「 アイドル 」タスクです。つまり、優先度の低いタスクです。通常の優先度の高いタスクを完了した後、プロセッサが残っている時間だけ割り当てられます。 さて、私たちの場合、このタスクはプロセッサに時間がないため空腹のままです。 ほんの一例としてここに持ってきました。
次に、「 start 」メソッドを使用してタスクを順番に開始し、タスクの機能、つまりプロセスで実行されるものへの参照を渡します。 これは「 ledblink 」-shmorgalka、「 cpu_usage 」 -CPU負荷の計算、および最も難しい-「 math_thread 」、配列の乗算を実行します。
各タスクを見てみましょう。 「 ledblink 」では、すべてが簡単です。
/**************************************************************************/ void ledblink (void) { while (true) { myled1 = !myled1; Thread::wait (500); } } /**************************************************************************/
LEDの出力状態を反対に交互に変更し、500ミリ秒の遅延を発生させます。 ところで、宣言「 myled1 」は次のようになります。
DigitalOut myled1(LED1);
ここでcpu_usageタスクに注目しましょう。
/**************************************************************************/ void cpu_usage (void) { Timer tim; CPU_Usage cpu(tim, 1); cpu.working(); uint8_t value = 0; while (true) { cpu.delay(0.25); value = cpu.update(); pc.printf("CPU %i", value); } } /**************************************************************************/
ここのすべては、もう少し複雑です。 一般に、自転車を発明しないために、私は2014年にアームmbedのためにCPU_Usageと呼ばれる面白い男が書いた既製のライブラリを使用しました。 あなたはそれを参照することができます、それの簡単な説明があります。 ライブラリはタイマーを使用します( Timer timクラスのオブジェクトが表示されます)。 最初に「 cpu 」クラスのコンストラクターが呼び出され、次に「 working 」( 作業の開始)メソッド、および「 update 」メソッドがプロセッサー負荷の割合を計算します。
おそらく今こそ、デモンストレーションするのに最適な時期です。 デバッグモードから画面を表示します。

左上の値「 value 」= 95が表示されます。これは、その時点でプロセッサの95%がロードされたことを意味します。 一般に、実験の結果によると、同じタスクを実行するときのこの値は、87〜98%で変動しました。
ところで、端末からではなくデバッガからのスクリーンショットを表示しているのはなぜですか? 簡単です。手元にUART-USBアダプターがないため、UARTターミナルを使用できません(この関数「 pc.printf() 」は単なるUART出力であり、pcはSerialクラスのオブジェクトです)。
そして、プロセッサにとって最後で最も食いしん坊なのはmath_threadタスクです。 それを見てみましょう-最初に「むき出しの」形で、次にアームmbedパンでもう少し。
/**************************************************************************/ void math_thread(void) { volatile uint16_t rand_num_dmassi1 = 0; volatile uint16_t rand_num_dmassi2 = 0; float result; while (true) { rand_num_dmassi1 = RandomMassIndex(); rand_num_dmassi2 = RandomMassIndex(); result = (DigMas1[rand_num_dmassi1]*DigMas2[rand_num_dmassi2]); } } /**************************************************************************/
プロセッサのロード方法を思いついたとき、配列の乗算がすぐに思い浮かびました。 そして、私がリモートで何かをしている(そして世界中の半分でリモートでデバッグしている)顧客がSkypeで私に叫んだときの状況を思い出しました:「 あなたはプログラマです。プロセッサをロードしてください! 彼はとても寒いです、暖かくしてください! 」 MCUを加熱します。 =)
そして、配列を順番に乗算するのではなく、乱数ジェネレータを使用してインデックスを生成することにしました。 そして、ここでも、素晴らしい数学ライブラリーalglibが役立ちました 。 それは数学的機能の巨大な層をカバーしており、あなたはここでそれを取ることができます 。 もちろん、機能の巨大な層全体を使用するわけではありませんが、小さな部分を使用します。
製品のタスク計算機を見ると、そこに「 RandomMassIndex() 」という2つの呼び出しがあります。 これは、範囲内の値を返す単なる関数です(範囲は配列要素の数によって制限されます)。
/**************************************************************************/ uint16_t RandomMassIndex (void){ uint16_t randval; alglib_impl::ae_state mystate; randval = alglib_impl::ae_randominteger(18, &mystate); return randval; } /******************************END_OF_FILE*********************************/
ここで私たちは何をしていますか。 まず、「 ae_state 」構造を初期化し(内部のニーズに使用されます)、次に「 ae_randominteger 」メソッドを呼び出します。このメソッドに構造へのリンクを渡し、生成された乱数を取得する範囲を取得します(0..18があります) ) この数は、生成される最大値よりも小さくする必要があります。 配列要素の数は20(0..19)で、最大数は19です。したがって、境界引数としての18は、私たちにぴったりです。
ところで、この関数を呼び出した結果を見ることができます。

左上は、ランダムに生成された配列のインデックスrand_num_dmassi1とrand_num_dmassi2です。 13および12。
別のサイクルを進めて、変化するかどうかを確認しましょう。
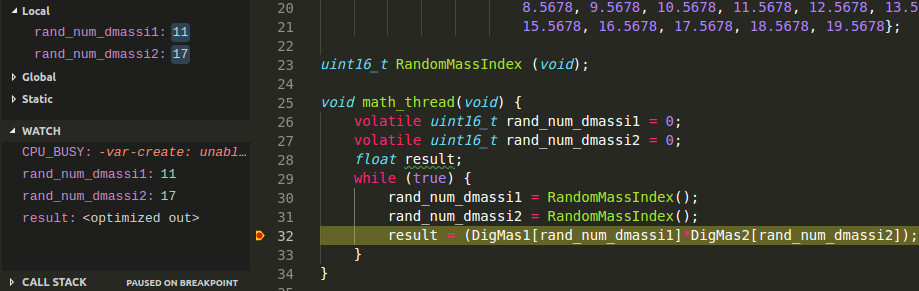
11および17。変更。 だからすべてが動作します。
リソース分析(特に、プロセッサ時間の使用)について話し始めたので、少しメモリ時間とタスクの優先順位をとります。 Arm mbed osは、これらのニーズに合わせてrtos :: Threadクラス全体を実装します。
次の行をmath_threadタスクに直接追加します。
osThreadId_t this_thread_id; volatile uint32_t this_thread_stacksize; volatile osPriority_t this_thread_priority; this_thread_id = osThreadGetId(); this_thread_stacksize = osThreadGetStackSize(this_thread_id); this_thread_priority = osThreadGetPriority(this_thread_id);
ここ(および上記)では、変数を追跡できるようにvolatileキーワードを使用しました。
そのため、最初に将来の使用のためにタスクIDを取得します。 次に、メソッドを呼び出してタスクスタックとその優先度を決定します。 優先度は外出先で変更できます-一部のアプリケーションではこれが必要です。
見ます。
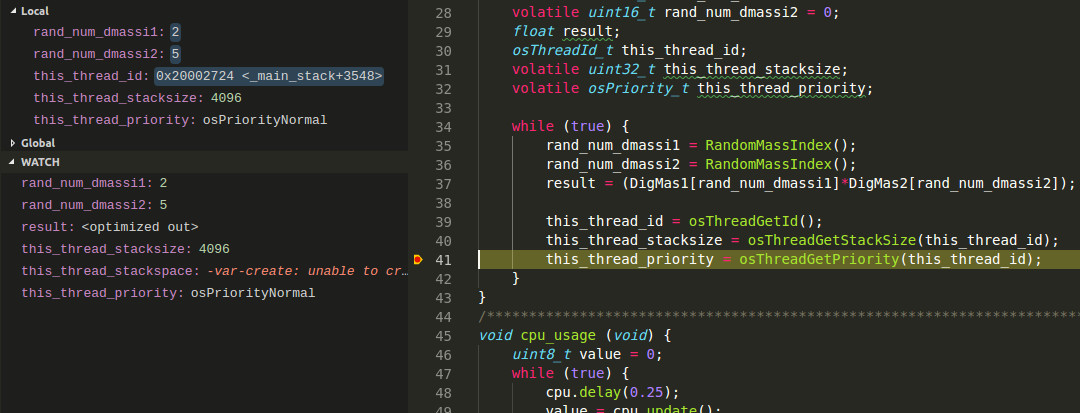
タスクスタックのサイズは4096バイトであり、優先度はosPriorityNormalであることがわかります。 通常の優先度。
さらに、ユーザビリティの程度、未使用および使用済みスタックのサイズを評価できます。 メインに直接追加:
volatile uint32_t threads_stack; volatile uint32_t threads_max_stack; volatile uint32_t free_stack; volatile uint32_t used_stack;
そして、タスクを開始した後:
threads_stack = thread0.stack_size(); threads_stack = thread1.stack_size(); threads_stack = thread2.stack_size(); threads_max_stack = thread0.max_stack(); threads_max_stack = thread1.max_stack(); threads_max_stack = thread2.max_stack(); free_stack = thread0.free_stack(); free_stack = thread1.free_stack(); free_stack = thread2.free_stack(); used_stack = thread0.used_stack(); used_stack = thread1.used_stack(); used_stack = thread2.used_stack();
ここでは4つのメソッドが呼び出されます。 「 Stack_size() 」はタスクスタックのサイズを返します(少し前に推定したものと同様)、「 max_stack() 」は実行プロセスで使用される最大サイズを返し、「 free_stack() 」は空き領域のサイズを返し、「 used_stack() 」-使用サイズ。 戻り値はバイト単位です。 3つのタスクすべてで、これらの値は同じになります。
デバッガー

ご覧のとおり、4096バイトからかなり離れています-64バイトのみで、まだ4032バイトの在庫があります。
おそらく私たちは実験と分析で終わるでしょう-私はすでにやりすぎています。
はい、著作権掲示板について他に言いたいことはありますか。 今、誰かが言うことができる、彼らは言う、彼はF4Discoveryを取り、それを楽しんで遊んだが、私は一般に自家製のボードを持っています、そしてLEDは一般に他の足に掛かります、そして一般に、私はそれにSPIを上げたいです。 そのため、 アーム付きリポジトリの「 targets 」フォルダー(非常に特定のMCUをさらに選択します-それらは暗い)、各マイクロコントローラーのディレクトリには、「 PinNames.h 」、「 PeripheralPins.h 」、「 PeripheralNames 」という名前の素晴らしいリーダーがいます.h 」。 これらのファイルを編集することにより、周辺機器を追加/編集/削除できます。
これ、おそらく、私は停止します。 arm mbedのさまざまなアプリケーション(非rtosを含むがベアメタルのみを含む)のその他の例は、 こちらのアーカイブで複製またはダウンロードできます 。
作成したサンプルを含む資料(Googleドライブ) へのリンクを添付し、ネタバレの下に完全なソースコードを配置して、全体像を完成させます。 どちらかといえば、subdia.subdia @ gmail.comへようこそ。
main.cpp
#include "mbed.h" #include "rtos.h" #include "CPU_Usage.h" #include "alglibmisc.h" #include "ap.h" DigitalOut myled1(LED1); DigitalOut myled2(LED2); Timer tim; CPU_Usage cpu(tim, 1); Serial pc(USBTX,USBRX,9600); #define PRETTY_ENOUGH 20 float DigMas1[PRETTY_ENOUGH] = {0.1234, 1.1234, 2.1234, 3.1234, 4.1234, 5.1234, 6.1234, 7.1234, 8.1234, 9.1234, 10.1234, 11.1234, 12.1234, 13.1234, 14.1234, 15.1234, 16.1234, 17.1234, 18.1234, 19.1234}; float DigMas2[PRETTY_ENOUGH] = {0.5678, 1.5678, 2.5678, 3.5678, 4.5678, 5.5678, 6.5678, 7.5678, 8.5678, 9.5678, 10.5678, 11.5678, 12.5678, 13.5678, 14.5678, 15.5678, 16.5678, 17.5678, 18.5678, 19.5678}; uint16_t RandomMassIndex (void); /**************************************************************************/ void math_thread(void) { volatile uint16_t rand_num_dmassi1 = 0; volatile uint16_t rand_num_dmassi2 = 0; float result; osThreadId_t this_thread_id; volatile uint32_t this_thread_stacksize; volatile osPriority_t this_thread_priority; while (true) { rand_num_dmassi1 = RandomMassIndex(); rand_num_dmassi2 = RandomMassIndex(); result = (DigMas1[rand_num_dmassi1]*DigMas2[rand_num_dmassi2]); this_thread_id = osThreadGetId(); this_thread_stacksize = osThreadGetStackSize(this_thread_id); this_thread_priority = osThreadGetPriority(this_thread_id); } } /**************************************************************************/ void cpu_usage (void) { uint8_t value = 0; while (true) { cpu.delay(0.25); value = cpu.update(); pc.printf("CPU %i", value); } } /**************************************************************************/ void ledblink (void) { while (true) { myled1 = !myled1; Thread::wait (500); } } /**************************************************************************/ void sleeping_sun(void) { return; } /**************************************************************************/ int main (void) { Thread thread0; Thread thread1; Thread thread2; volatile uint32_t threads_stack; volatile uint32_t threads_max_stack; volatile uint32_t free_stack; volatile uint32_t used_stack; Thread::attach_idle_hook (&sleeping_sun); thread0.start (&ledblink); thread1.start (&cpu_usage); thread2.start (&math_thread); threads_stack = thread0.stack_size(); threads_stack = thread1.stack_size(); threads_stack = thread2.stack_size(); threads_max_stack = thread0.max_stack(); threads_max_stack = thread1.max_stack(); threads_max_stack = thread2.max_stack(); free_stack = thread0.free_stack(); free_stack = thread1.free_stack(); free_stack = thread2.free_stack(); used_stack = thread0.used_stack(); used_stack = thread1.used_stack(); used_stack = thread2.used_stack(); cpu.working(); while (true) { } } /**************************************************************************/ uint16_t RandomMassIndex (void){ uint16_t randval; alglib_impl::ae_state mystate; randval = alglib_impl::ae_randominteger(18, &mystate); return randval; } /******************************END_OF_FILE*********************************/
ご清聴ありがとうございました。すべての良い一日と良い気分。
