
そして、残酷な失望が私を待っていました-陰鬱な中国の天才のこの創造には、惑星ヌビラの爬虫類にとって非常にアクセスしやすいプログラミングシステムが含まれていましたが、6歳の子供にはほとんど適していません。 さらに、突然、Mituと互換性のあるセンサーを待たないことが非常に可能であることが判明しました。
しかし、子供が尋ねた場合、パパは拒否できません。 NXT / EV3のスターター向けのオプションを探し始めました。もちろん、レゴを見ています。 コンピューターとモーター/ボタンの両方の価格にすぐに少し失望し、最後のきしむWedoを見始めました-そして、一般的にすべてが落ち込んでいます。
わかりました、代替バージョンがあります、私は興味深いSbrickプロジェクトを見つけます-価格は多かれ少なかれ正気であり、互換性のあるモーターはAliで使用できますが、プログラミングは大きくありません。
また、ビーグルボーンとアルドゥインにはあらゆる種類の盾がありましたが、注目に値するものは何も見つかりませんでした。
まあ、長い冬の夜が来ていたので、ファイルを取り、のこぎりを始めました。
最初のバージョンでは、宣伝されているESP32を使用し、OLEDを搭載しています。 美人

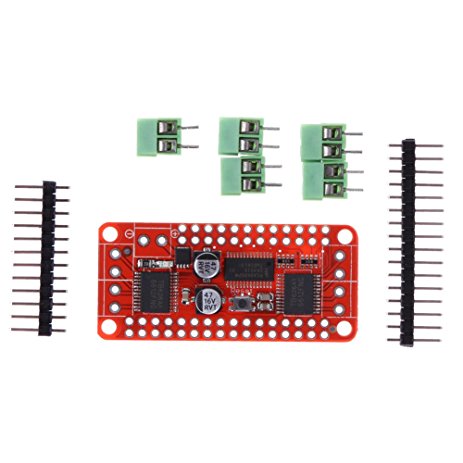
モーター用ドライバーとPCA9685を備えたシールドが彼女の会社のために購入されました。
私の熱意は約一週間で十分でした。 つまり 画面に何かが表示され、モーターが回転していますが、背中に何かを感じます -間違ったチップ。 おそらくどこか彼のためにニッチがありますが、非常に狭く専門化され、それはあまりにも不均衡であり、ある種の中国人です。
私はESP32に大胆な十字架を付け、次の割合を取ります。 偶然に、それはRTL8710であることが判明しました。「ああ、おかしい! そして安価!」
しかし、ここで私は多くの時間を費やす必要さえありませんでした:)

明確な良心をもって、チップは埋立地に送られます。 そして、ここで紹介は終了し、プロジェクト自体に進みます。 私のテーブルの次のものはNRF52でした。 そしてそれは偶然ではありません-安定したKFORと賢明な技術サポートを備えたバランスの取れたワークステーションです。 最初の膝関節バージョンを収集します:

手始めに、LEDとBluetoothプロファイルのみ。 私は最も基本的なことをデバッグしていますが、ここにあることを理解しています! これはまさに私が必要とするチップです。 これで、プロジェクトに少し筋肉を追加できます。
さて、スピーカー、ドライバー、加速度計、周辺機器用のコネクタが既にあります。 コネクタとして、最初はMituのようにUSB-Cオプションを検討しましたが、接続ケーブルの作成の複雑さに戸惑っていました。 したがって、私は自転車を発明しませんでしたが、レゴRJ-12とほぼ互換性を置くだけでした。 彼らは、子供の遊び心のあるペンのように、簡単に絞ることができ、安価で非常に信頼性があります。
さて、通常のレゴフの詳細では、コネクタは3分で変更されます。

多かれ少なかれ賢明なソフトウェアはすでにここに書かれており、Bluetooth経由で電話からハードウェアを設定および制御することができます。
並行して、 CircuitMakerでプロジェクトが作成され(これは同じAltiumで、無料のみ)、回路とボードが描画されます。
アリでは、ボードの製造であるSiidstudioでささいなものが購入され、ゆっくりと海に浮かぶ間、ファームウェアを書き続けます。
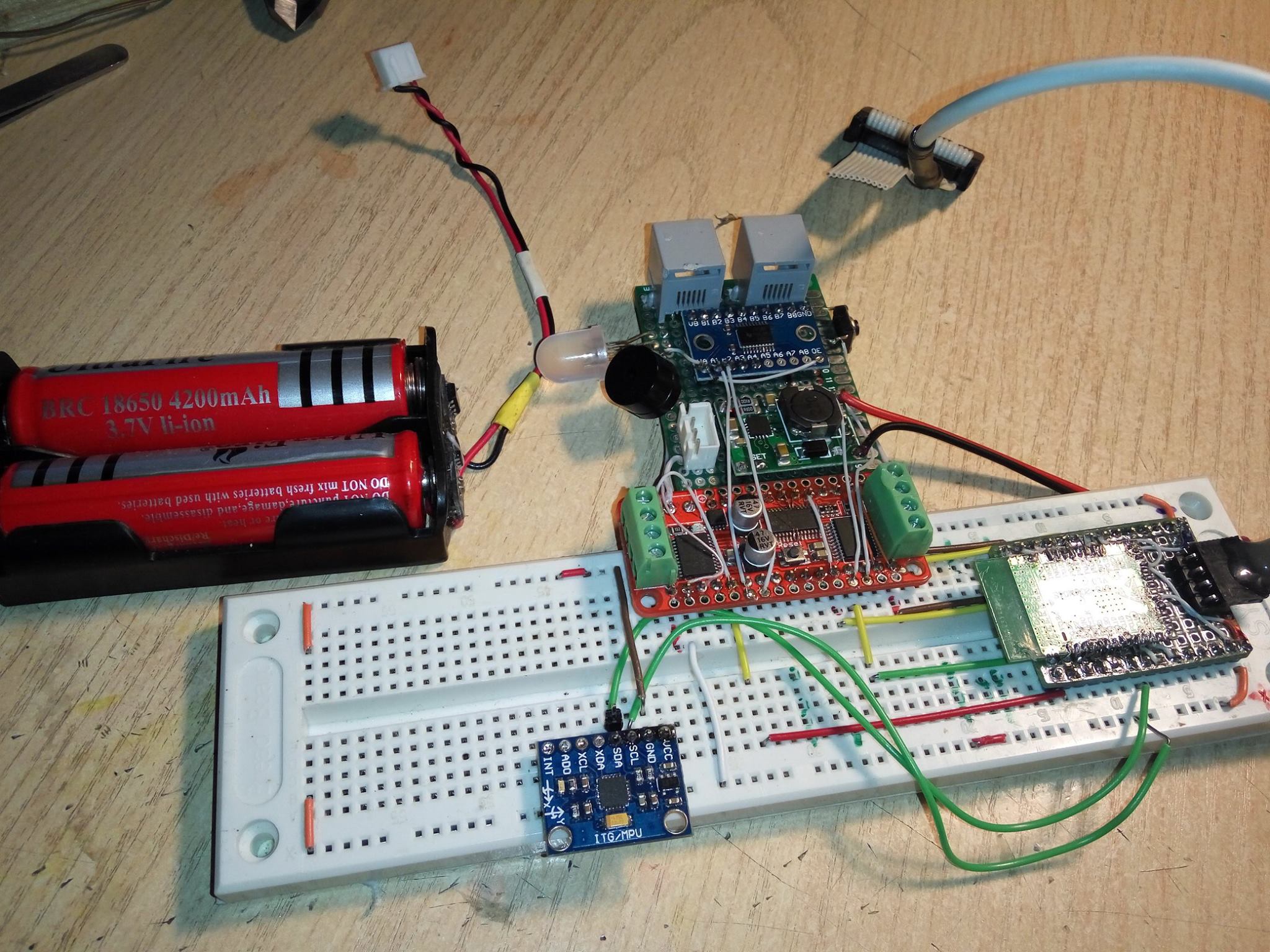
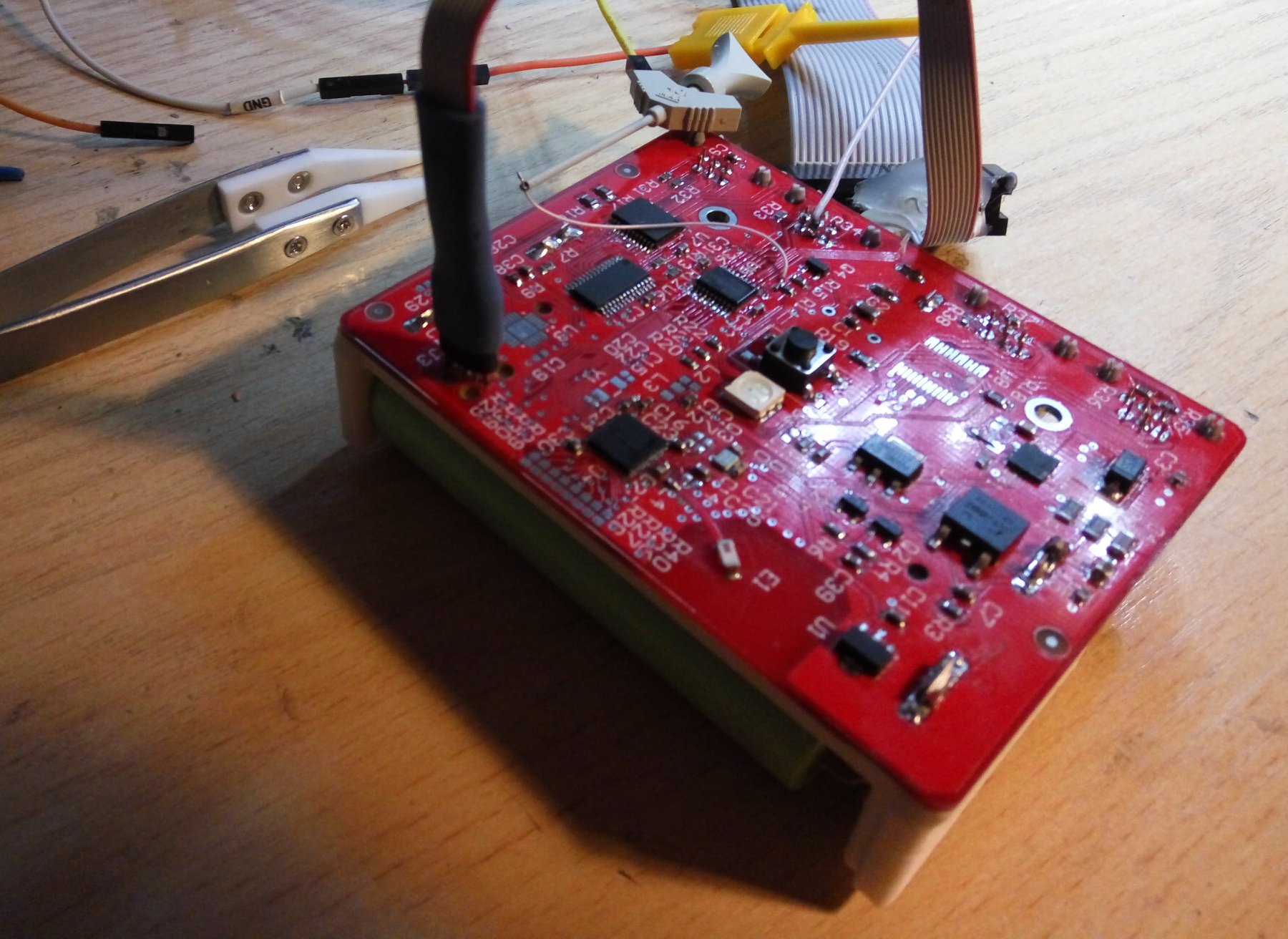
最後に、ボードとパーツの一部が到着しました。

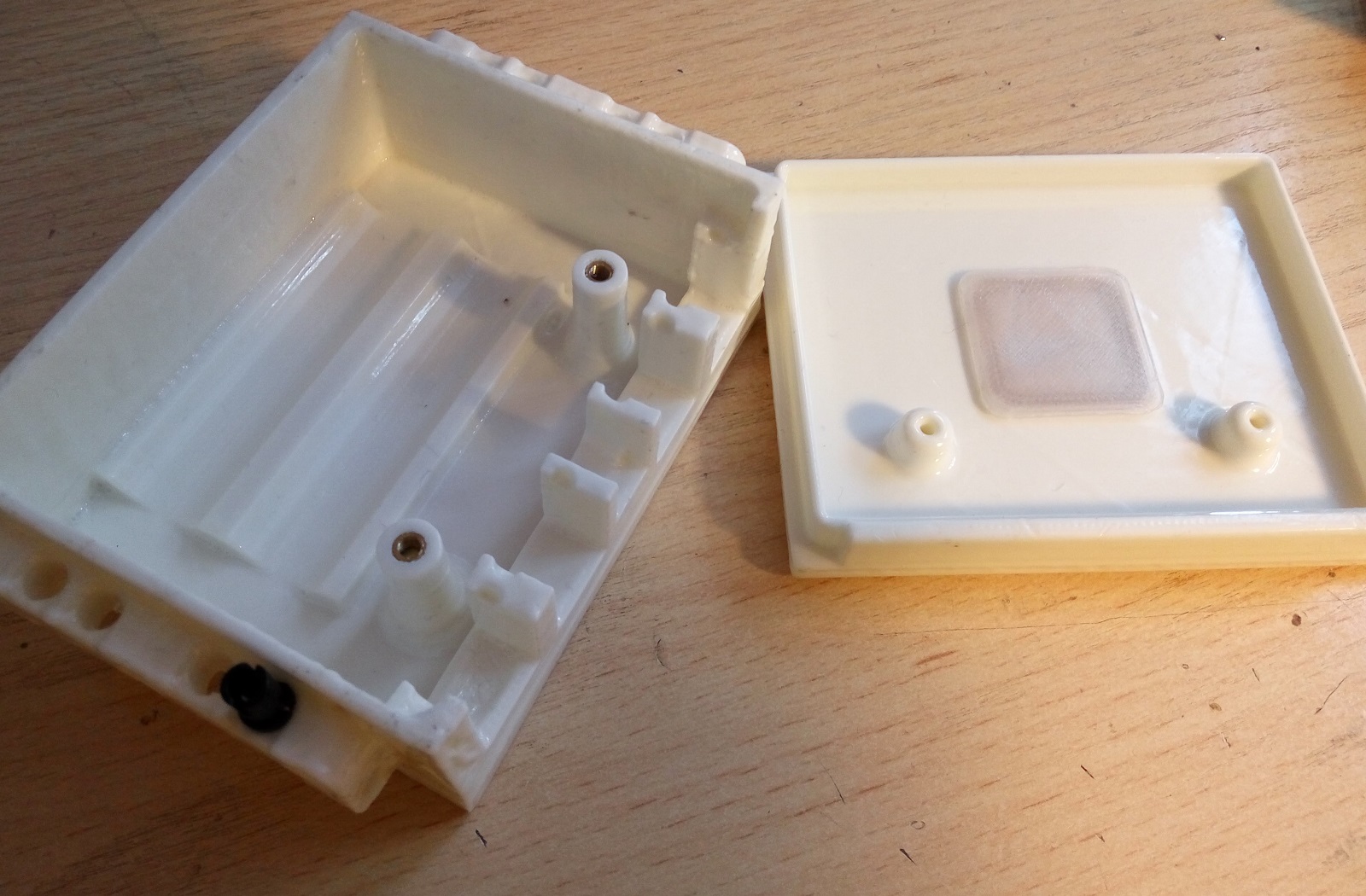
ファームウェアを入力し、点滅するLEDを楽しんでください。 次のパートの時が来ました。 バッテリーコンパートメントのモデルを描画し、3Dプリンターで印刷します。
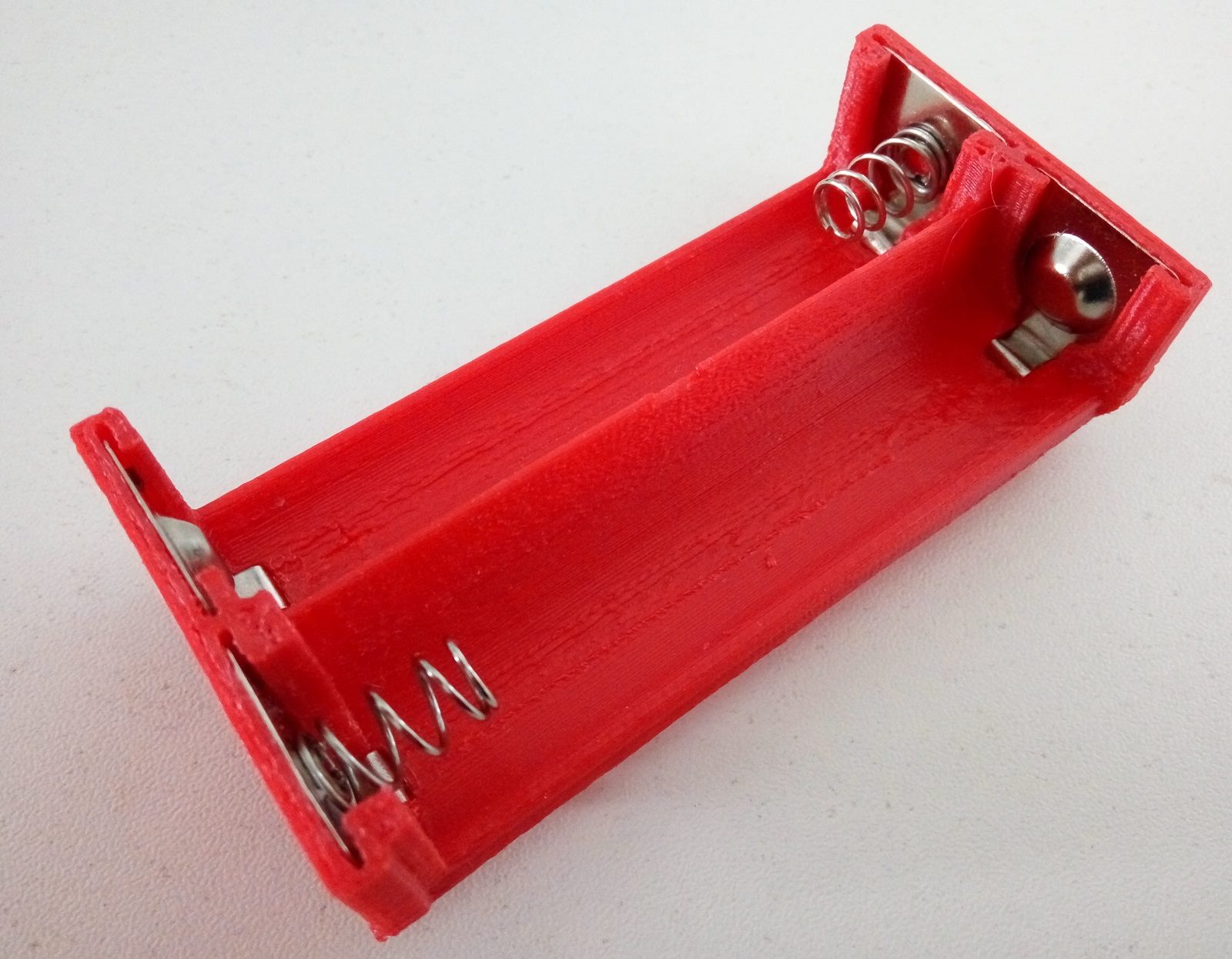
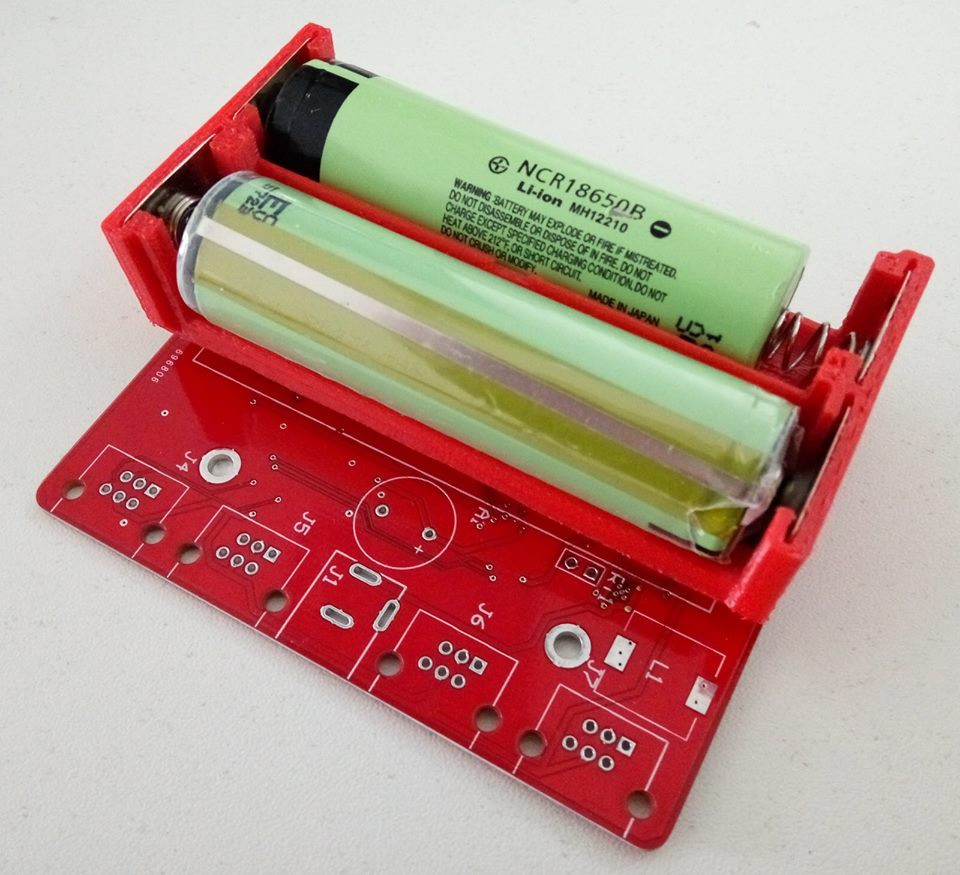
また、中国のホルダーとは異なり、このバッテリーでは保護の有無にかかわらずバッテリーを挿入できます。
非常に突然、ボードの最初のバージョンにはグローバルな妨害がなく、すべての詳細が収まり、ジャンパーはどこにも忘れられず、途中の小さな更新はカウントされません:
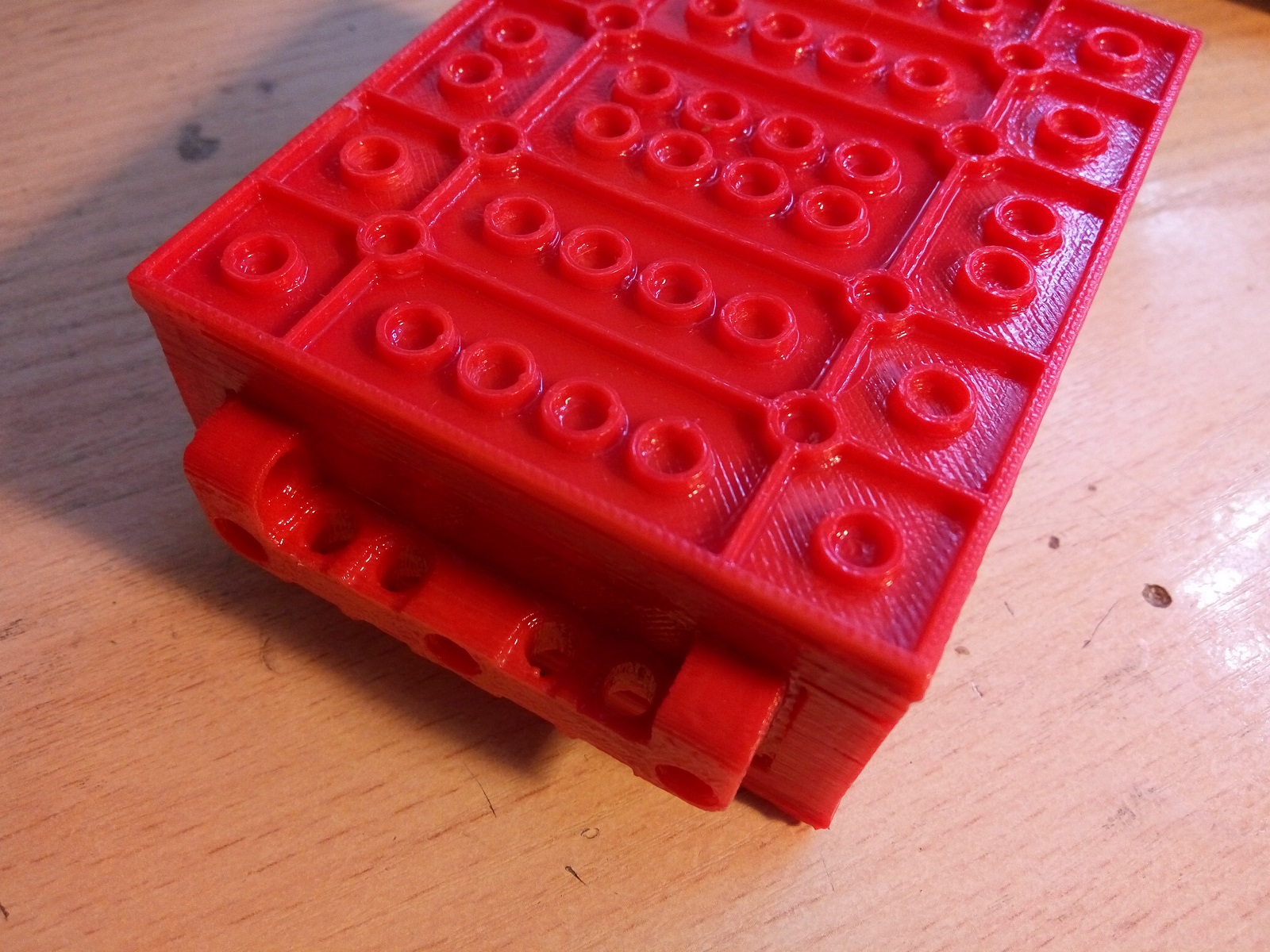
再び、はんだごてを延ばし、3Dプリンターを取ります。 数十の失敗したモデルの後、まともなボディが得られます:
裏側では、すべてが通常のレゴに接続する準備ができており、側面の耳はレゴテクニックと同じサイズです:
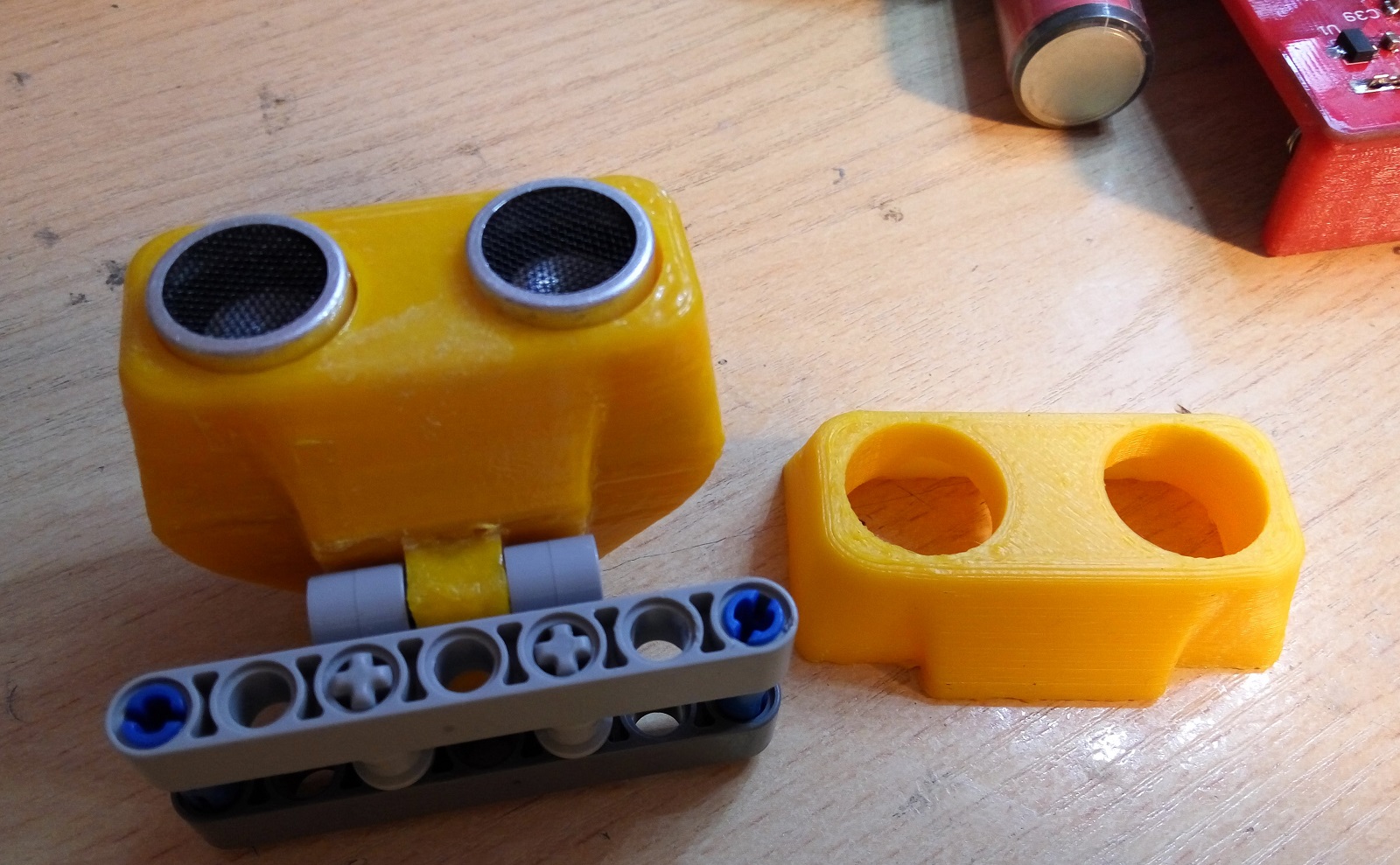
私はレゴ互換の普通の中国製モーターを使用しますが、あらゆる種類の追加バンを個別に行います。 たとえば、1ドルの中国のHC-SR04から、優れたRange srnsorが得られました。
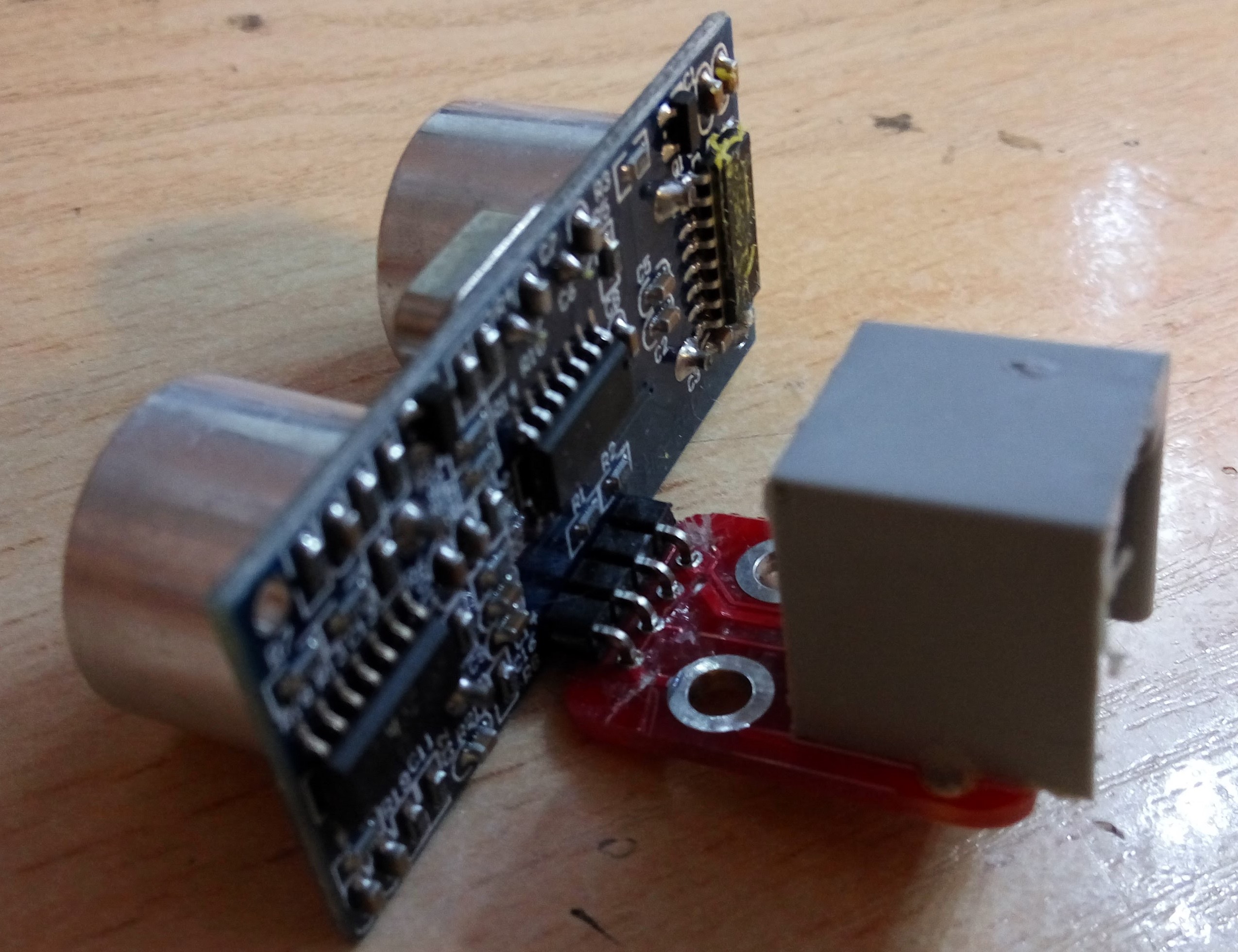
プリントケースとコネクタを使用すると、そのコストは3ドル未満ですが、 同様のレゴフスキーのものは57ドルです。
合計で、今日、javascriptの助けを借りてモーターとセンサーを操作する方法を知っているボックスがあります(わずかにキャストされたEspruinoは内部でサブモジュールとして回転します)。ボックスは、Bluetooth、回路、ボード、並べ替え、3Dモデルを介してファームウェアを更新できます-すべてがGitHubで開かれた形式でレイアウトされています。
残念ながら、私にはまだ1つの未解決のタスクがあります。 まだ皮肉だし、Android用のソフトインクを書く必要があったとき、私は少し悲しかった。
計画では、通常のBlocklyコードを取得し、Bluetooth経由で更新を追加します。 そして、参加したり、同じおもちゃを作りたいと思っている人がいれば-ようこそ。
Github
スキーム
Facebookグループ
この鉄片が赤ちゃんだけでなく役に立つことを願っています。