アルゴリズムの出力では、入力シーケンスに表示される車両の数に応じて、いくつかのフレームが形成されます。 各出力フレームには、カメラの視野内の車両の個々のトラックとこの車両の画像が表示されます。 隣接する長方形の中心の現在位置に関するデジタル情報、瞬時および平均車両速度がそこに配置されます。
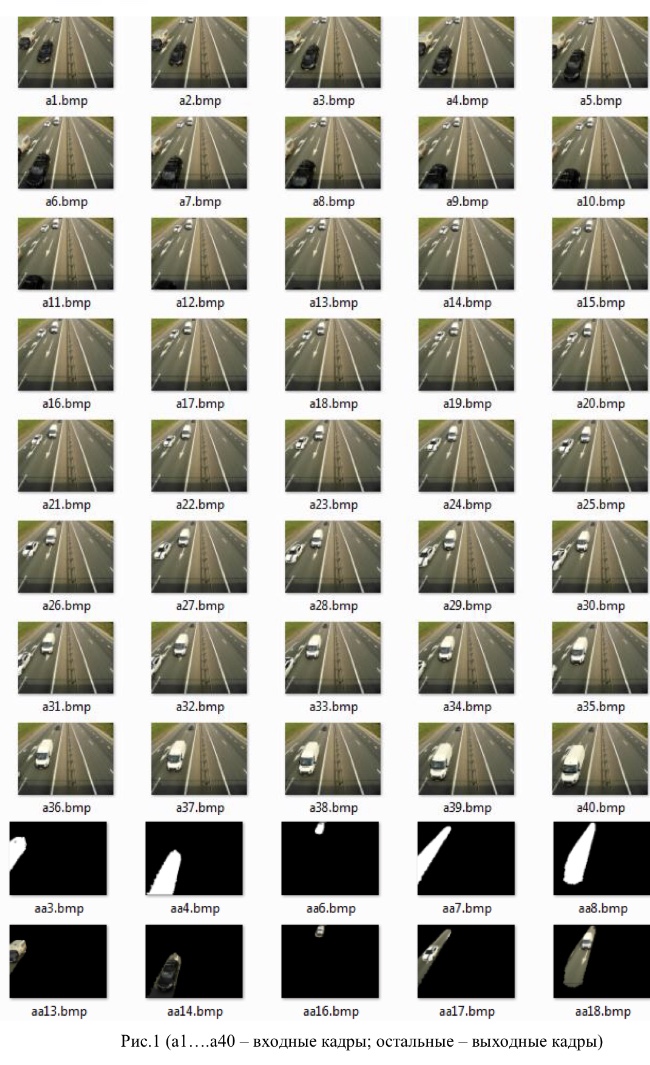
例として、図1は、M8高速道路の高架道路の1つから取得した40フレームで構成される入力シーケンスの処理結果を示しています。 5つのフレームが出力に形成され、トラックとカメラの視野内に収まった各車両の画像が表示されました。
アルゴリズムは3つのブロックで構成されています。
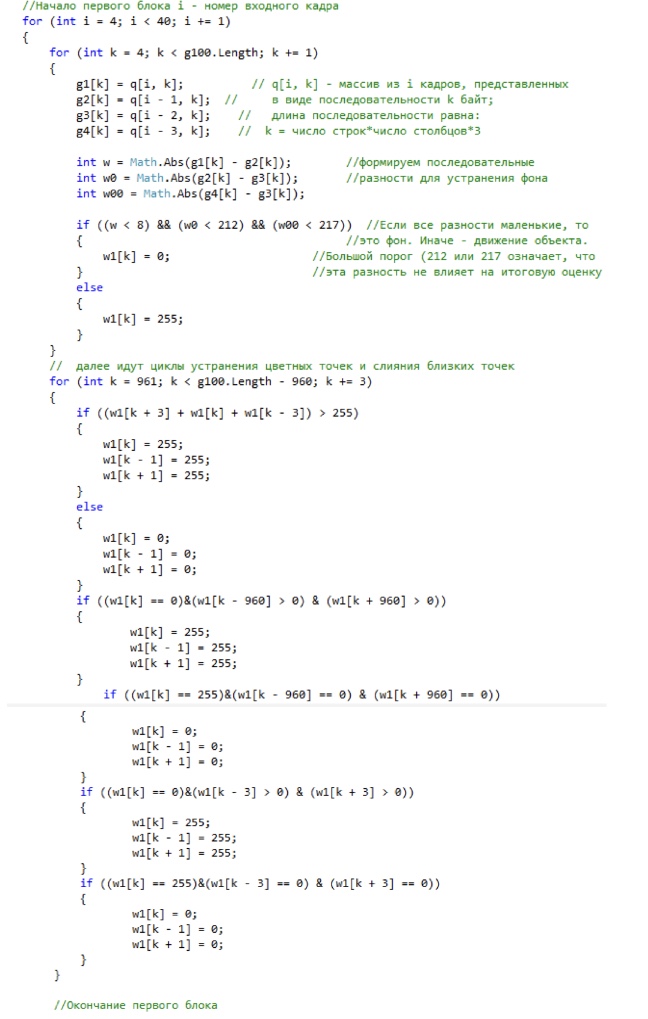
最初のブロックでは、いくつかの連続したフレームからバイナリフレームが形成され、黒い背景に白い斑点の形で動いているオブジェクトやその断片が表示されます。
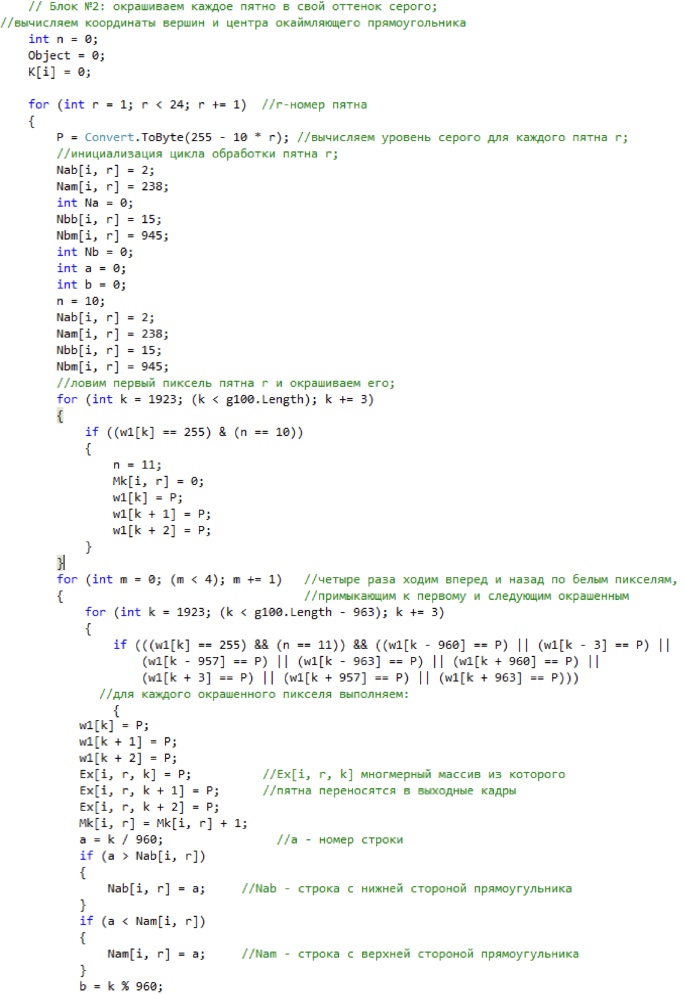
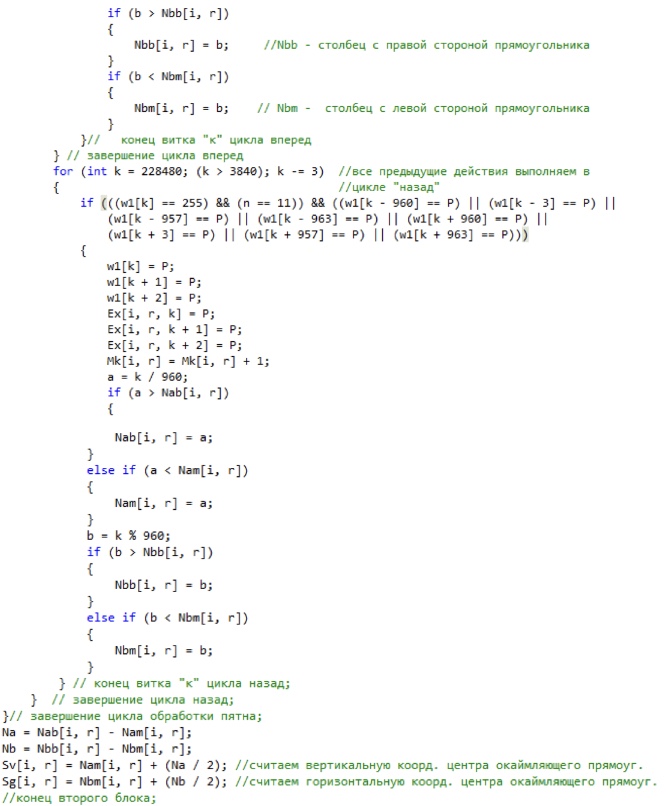
2番目のブロックでは、各スポットはグレーの濃淡で色付けされ、スポット内のピクセルの質量、スポットに接する長方形のサイズ、およびその頂点と中心の座標が計算されます。
3番目のブロックでは、前のフレームの各スポットに対する各スポットの変位が計算され、同じオブジェクトに関連する可能性が最も高いスポットは最小変位によって決定されます。 個々の色付けにより、これらのスポットは区別され、一連の近接スポットを表示する別々のフレームに転送されます。
このようなフレームは、スポットごとに個別であり、最終的には同期して移動するスポットの面付けによって形成された移動オブジェクトの軌跡を表示します。 車両の速度は、スポットに接する長方形の中心または頂点をシフトすることで推定できます。 より正確な方法は、記事[1]で説明されています。
このアルゴリズムは、出力フレームの情報コンテンツのおかげで非常に効果的です。 カメラの視野内の車両の位置と速度に関するデジタル情報、および各車両とそのトラックのサイズ、外観に関する視覚データを含めることができます。
以下は、最初と2番目のブロックのプログラムのスクリーンショットです。
3番目のブロックのコードには同じ並べ替えの多くが含まれており、かなり難しくて遅いことが判明しました。 したがって、それは記事に記載されていません。 処理プログラムの完全なコードを希望する人に送信できます。 (ただし、プログラムが「ティーポット」によって作成されていることを理解する必要があります)。
アルゴリズムを構成するには、隣接するフレームの同じピクセルの照度レベルのペアワイズ比較の値を推定するためのしきい値を設定する必要があります。 最適なしきい値は、プログラムでシンボルw1 [k]で示されるバイナリフレーム上の最小スポット数に対応します。
図2は、各ピクセルの照明をペアで比較するためのフレームのグループを示しています。
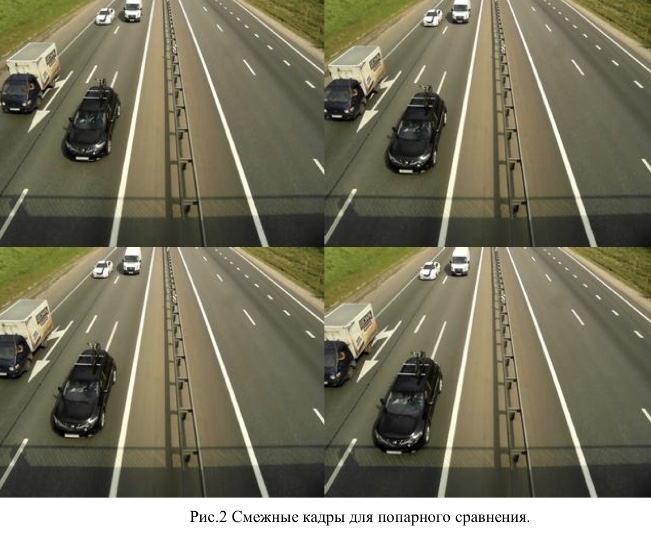
図3a、3b、3cは、2つの隣接フレームから得られるバイナリフレームとグレースケールフレームの外観に対するしきい値の影響を示しています(2番目と3番目のしきい値は非常に大きいため、3番目と4番目のフレームは無効です)。
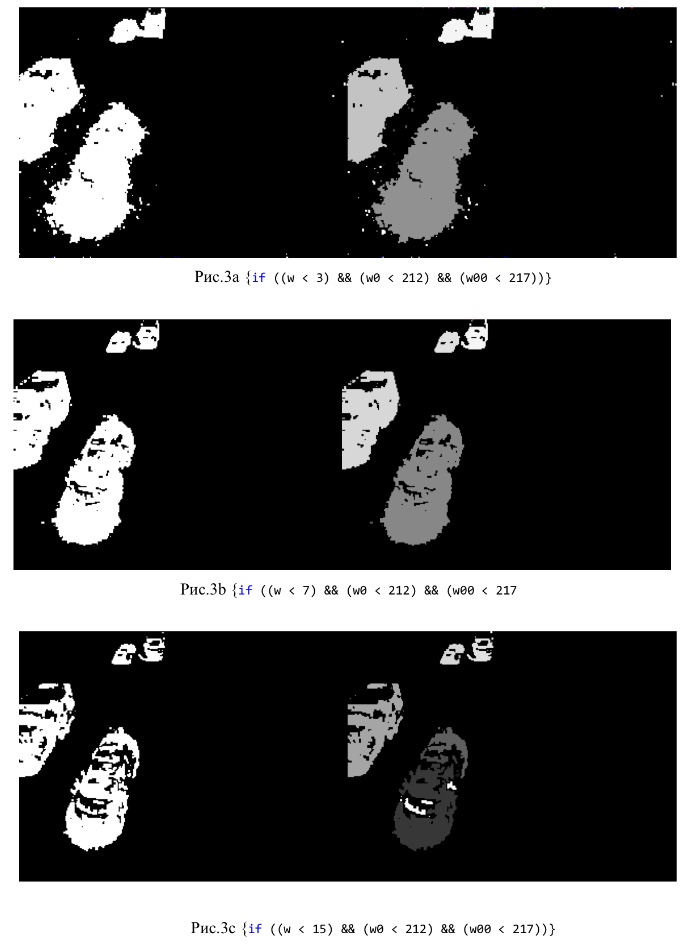
図4a、4b、4cは、3つの隣接フレームから得られたバイナリフレームとグレースケールフレームの外観に対するしきい値の影響を示しています(3番目のしきい値は4番目のフレームを無効にします)。
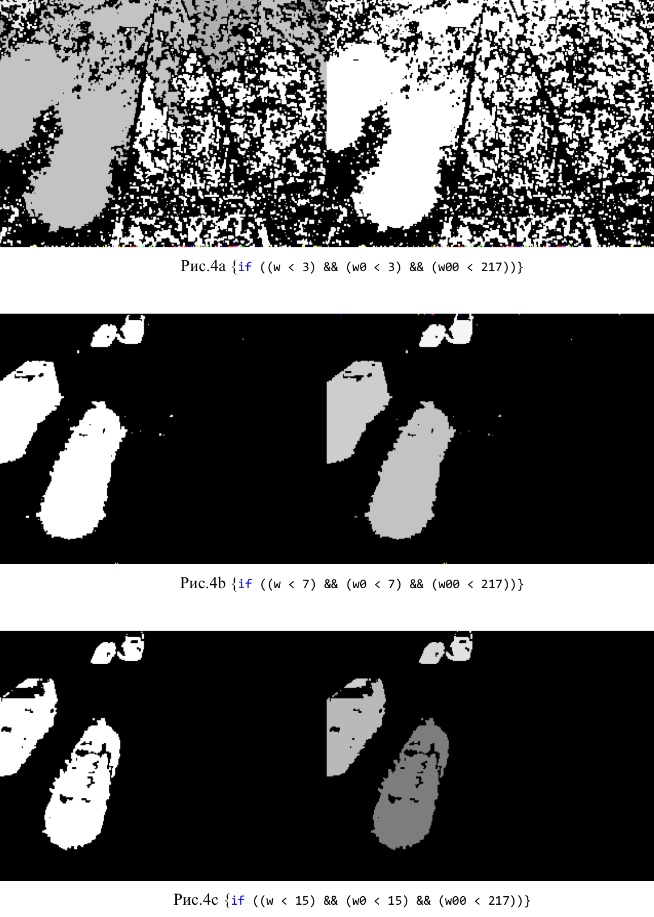
図5a、5b、5cは、バイナリフレームと4つの隣接するフレームから得られたグレーシェードのフレームの外観に対するしきい値の影響を示しています。
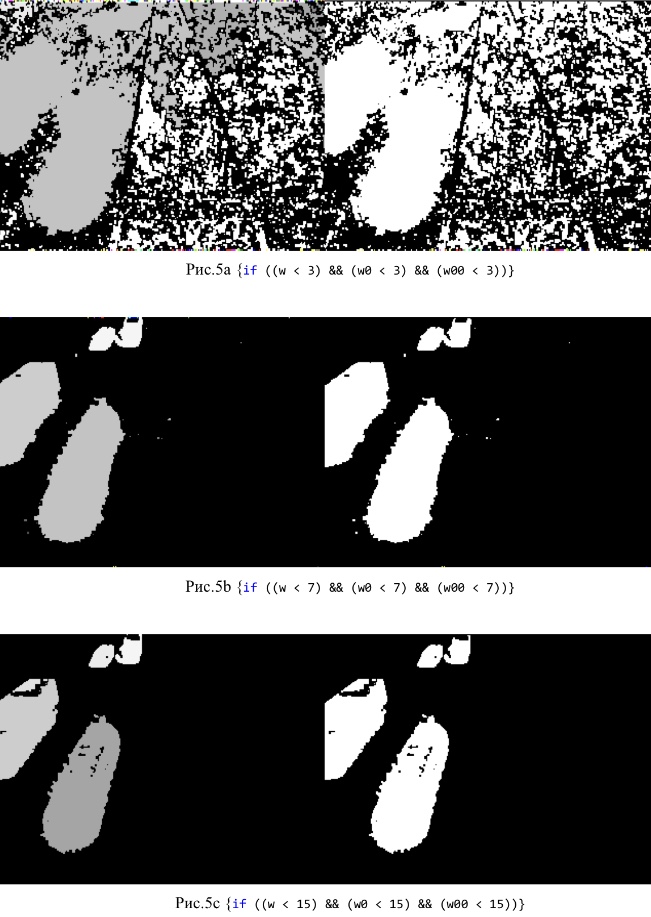
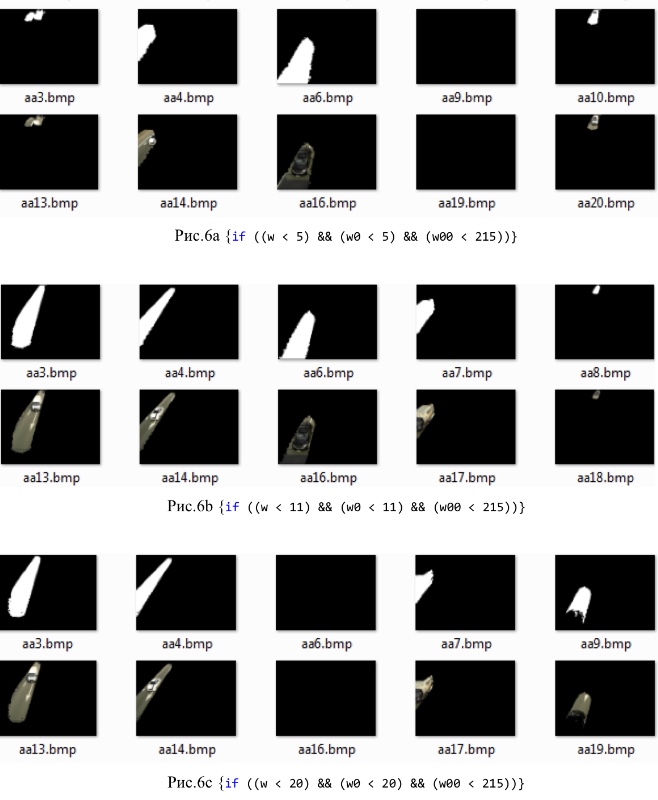
図6は、出力フレームのタイプに対するしきい値の影響を示しています。
文学
1.ヤコブレフA.A. 特別なポイントの方法を使用したビデオによる速度の決定。 現代科学の実際の問題/ 1X国際科学および実務会議の資料に関する記事の収集(2018年2月8日、トムスク)。 パート1-p。97 /-Ufa:Ed。 デンドラ、2018年。