変電所では、多くの場合、メーターの性能の運用検証が必要です。
原則として、メーターがASKUEの一部として機能し、ねじれによってグループで接続されている場所
RS 485をペアにしてゲートウェイMercury 228に接続すると、現時点で通信が失われます
サーバー側からの通信を確立します。
カウンターからのデータがサーバーに送信されない理由を調べるには、以下を行う必要があります
常にラップトップとMercury 221コンバーターを持ち運び、チェックされている場合
メーターがセルに正しく接続されている場合、VAFデバイスを使用する必要があります。
屋外の開閉装置または屋内の開閉装置の変電所は、コンピューター機器を操作する場所を常に提供できるとは限らないため、私はamperka.ruのArduinoモジュールに基づいた小さなデバイスを開発しました。
通信はBluetoothを介して行われますが、メーターはスマートフォンにインストールされたアプリケーションからポーリングされます。
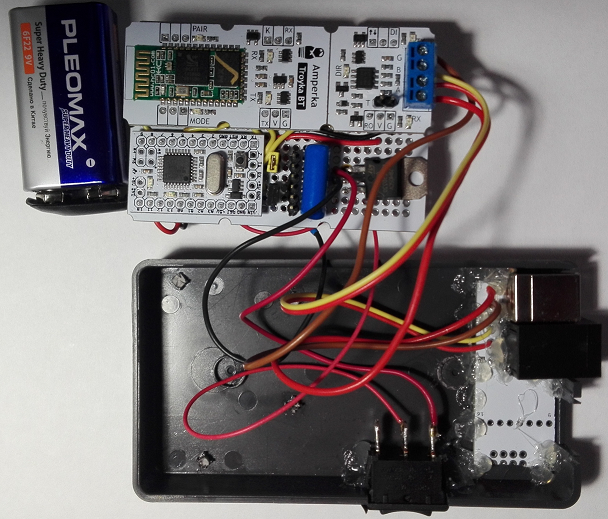
コンバーターボード。
コンバーターボードはモジュールのセットです。
-Iskra Miniは、ATmega328マイクロコントローラーがインストールされた本格的なArduinoプラットフォームです。
- 拡張カード -BluetoothモジュールHC-05。
- 拡張カード -RS-485トランシーバー。
-9V「クロナ」タイプのバッテリーパック(すぐに予約します。携帯電話の充電にはバッテリーを使用することをお勧めします)
-電源ボタン。
-5V電源用のUSBコネクタ。
-RS485ラインを接続するためのRJ11コネクタ。
すべての要素は、プラスチックケースに入れられた別個のマザーボード上にあります。 コンバーターがオンになると、HC-05 Bluetoothモジュールは動作モードに入ります
「トランスペアレントUART」。スマートフォンからの接続を想定しています。
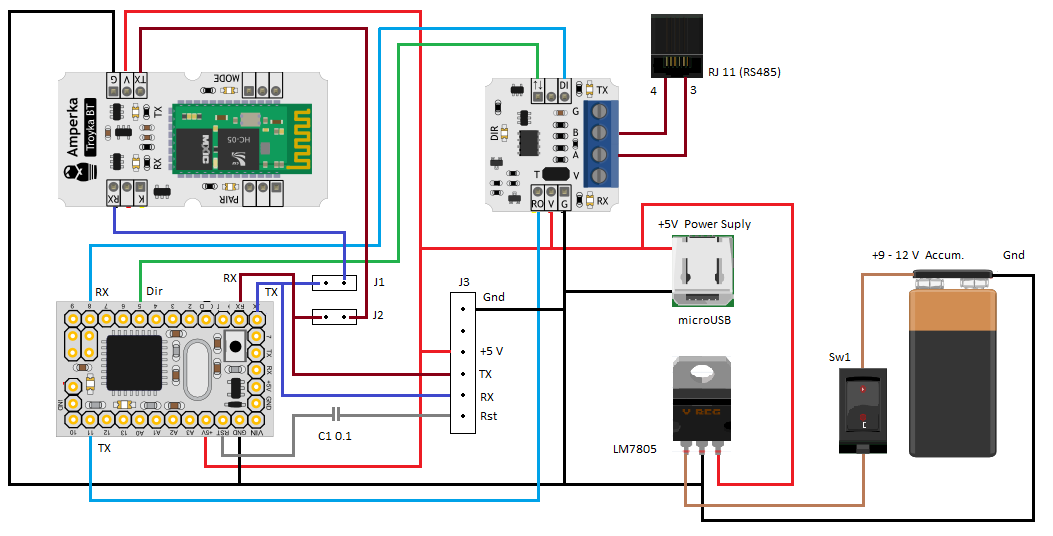
配線図。
スイッチSW1がオンになると、9〜12ボルトの電圧が電子回路に供給されます。
LM7805レギュレーター(別のモデルと交換することが望ましい)。
レギュレータの出力から、Iskra Miniピン「+ 5V」、Bluetoothモジュールピン「V」、RS485ピン「V」に5ボルトの低減電圧が印加されます。 バッテリーのマイナス線は、すべてのモジュールのGNDピンに接続されます。 microUSBコネクタを介して5ボルトの供給電圧を印加すると、LM7805レギュレータをバイパスして、すべてのモジュールに同様に電力が供給されます。
J1およびJ2はジャンパーであり、動作中は閉じる必要があります。
J3-Iskra Miniモジュールを「フラッシュ」するために設計された6ピンコネクタ
USBシリアルアダプター。
Iskra Miniモジュールにソフトウェアをダウンロードするときは、ジャンパーJ1およびJ2が開いている必要があります。 コンデンサC1は、ソフトウェアのダウンロード時にマイクロコントローラーをリセットするように設計されています。
Iskra Miniの「RX」ターミナルは、Bluetoothモジュールの「TX」ターミナルに接続するため、
マイクロコントローラーはBluetoothからデータを受信します。
Iskra Miniの「TX」端子は、Bluetoothモジュールの「RX」端子に接続されているため、
マイクロコントローラーはコマンドをBluetoothに送信します。
ピン「8」Iskra MiniはRS485モジュールのピン「DI」に接続し、マイクロコントローラーは
ラインでのコマンド送信。
ピン「11」Iskra MiniはRS485モジュールのピン「RO」に接続し、マイクロコントローラーは
行から回答を読む。
ピン「5」Iskra Miniは、RS485モジュール、マイクロコントローラーのピン「In / Out」に接続します
RS485トランシーバーの動作モードを切り替えます。
RJ11-RS485ラインを接続するためのコネクタ。
コンバーターソフトウェア。
デバイスに電力を供給した後、マイクロコントローラーはサイクリックモードに入ります
コマンドを待っています。
コマンドのリスト:
ping_ -- «ping_». .
scan_ -- 0 254
init_XXX – . , 10 , 100 – . «init_XXX». . . № 13 02 97 02 : init_002 : init_002 № 16 24 07 32 : init_032 : init_032 № 17 14 51 52 : init_152 : init_152
loop_XXX – «loop_XXX». .
stop_ – «stop_000». .
コマンド実行後のマイクロコントローラーの回答:
Connect_OK-指定されたネットワークアドレスを持つデバイスがネットワーク上で見つかりました。
Connect_FAIL-このネットワークアドレスを持つデバイスは応答していません。
Access_OK-アクセスパスワードが送信され、応答が受信されます。
Access_FAIL-アクセスは閉じられ、パスワードは受け入れられません。
マイクロコントローラーソフトウェアの動作アルゴリズム。
initまたはloopコマンドを受信した後、バイトシーケンスが送信されます
ネットアドレス、0x00、0x00、CRC 1、CRC 2。
デバイスがネットワーク上にある場合、同様の回答があり、その後ネットワークアドレスが送信されます-送受信されます。
応答配列内のCRCチェックは現在実行されていません。
肯定的な比較では、Connect_OK文字列がBluetoothモジュールに送信されます。それ以外の場合はConnect_FAILです。
次に、パスワードで送信されたアクセス要求が送信されますNet Address、0x00、0x01、0x01、0x01、0x01、0x01、0x01、0x01、0x01、CRC 1、CRC
デバイス検出要求と同様の応答を受信すると、Access_OK文字列がBluetoothモジュールに送信されます。それ以外の場合はAccess_FAILが送信されます。
接続が確立された後、データを受信するための要求の送信は、
プロトコル。
Net Address, 0x00, 0x08, 0x00, CRC 1, CRC -- Net Address, 0x00, 0x08, 0x16, 0x40, CRC 1, CRC -- Net Address, 0x00, 0x08, 0x16, 0x21, CRC 1, CRC -- Net Address, 0x00, 0x08, 0x16, 0x11, CRC 1, CRC -- Net Address, 0x00, 0x08, 0x16, 0x00, CRC 1, CRC-- Net Address, 0x00, 0x08, 0x16, 0x51, CRC 1, CRC -- Net Address, 0x00, 0x05, 0x00, 0x00, CRC 1, CRC -- + + + .
製造元の推奨事項を参照すると、コンバーターは常にマスターデバイスであり、ポーリングされたデバイスはスレーブであるため、要求と応答の間のタイムアウトに特に注意する必要があります。
経験から、タイムアウト値と正解数はRS485回線の品質と長さに依存するため、これらのパラメーターを調整する必要がある場合があります。
m230.ino
#include <SoftwareSerial.h> //-------- rs 485 #define SSerialRx 11 // Serial Receive pin RO #define SSerialTx 8 // Serial Transmit pin DI //-------- SoftwareSerial RS485Serial(SSerialRx, SSerialTx); // Rx, Tx //// #define SerialControl 5 // RS485 Direction control /////// #define RS485Transmit HIGH #define RS485Receive LOW /////// byte testConnect[] = { 0x00, 0x00 }; byte Access[] = { 0x00, 0x01, 0x01, 0x01, 0x01, 0x01, 0x01, 0x01, 0x01}; byte Sn[] = { 0x00, 0x08, 0x00 }; // byte Freq[] = { 0x00, 0x08, 0x16, 0x40 }; // byte Current[] = { 0x00, 0x08, 0x16, 0x21 };// byte Suply[] = { 0x00, 0x08, 0x16, 0x11 }; // byte Power[] = { 0x00, 0x08, 0x16, 0x00 };// p byte PowerQ[] = { 0x00, 0x08, 0x16, 0x08 };// Q byte PowerS[] = { 0x00, 0x08, 0x16, 0x04 };// S byte CosF[] = { 0x00, 0x08, 0x16, 0x30 };// cosf byte Angle[] = { 0x00, 0x08, 0x16, 0x51 }; // byte energyT0[] = { 0x00, 0x05, 0x00, 0x00 };/// + + + byte energyT1[] = { 0x00, 0x05, 0x00, 0x01 };/// + + + byte energyT2[] = { 0x00, 0x05, 0x00, 0x02 };/// + + + byte energyT3[] = { 0x00, 0x05, 0x00, 0x03 };/// + + + byte energyT4[] = { 0x00, 0x05, 0x00, 0x04 };/// + + + byte response[19]; int byteReceived; int byteSend; int netAdr; int SCAN_YES_NO=0; int TST_YES_NO=0; int ACCESS_YES_NO=0; int ALLOW=0; void setup() { RS485Serial.begin(9600); Serial.begin(9600); // 5 pinMode(SerialControl, OUTPUT); // digitalWrite(SerialControl, RS485Receive); delay(300); Serial.println("Start_v2.3\r\n"); } void loop() { TST_YES_NO=0; ACCESS_YES_NO=0; ALLOW=0; while (Serial.available()) { char incomingBytes[15]; if(Serial.available()>0) { Serial.readBytes(incomingBytes,10); } String getS = String(incomingBytes); if(getS.substring(0,5) == "init_") { ALLOW=1; Serial.print(getS.substring(0,5)+getS.substring(5,8)+"\r\n"); netAdr=getS.substring(5,8).toInt(); } if(getS.substring(0,5) == "loop_") { ALLOW=1; SCAN_YES_NO=1; Serial.print(getS.substring(0,5)+getS.substring(5,8)+"\r\n"); netAdr=getS.substring(5,8).toInt(); } if(getS.substring(0,5) == "scan_") { ALLOW=0; SCAN_YES_NO=0; Serial.print(getS.substring(0,5)+"\r\n"); netAdr=1; while(netAdr < 256) { testConnect[0] = netAdr; response[0] = 0; send(testConnect, sizeof(testConnect), response); if(response[0] == netAdr) { Serial.print("scan;ok;"+String(netAdr)+";0\r\n"); } else { Serial.print("scan;no;"+String(netAdr)+";0\r\n"); } netAdr++; delay(5); } netAdr=0; } if(getS.substring(0,5) == "stop_") { ALLOW=0; SCAN_YES_NO=0; Serial.print(getS.substring(0,5)+"000\r\n"); //netAdr=getS.substring(5,8).toInt(); } if(getS.substring(0,5) == "ping_") { Serial.print(getS.substring(0,5)+"\r\n"); } } if(ALLOW==1 or SCAN_YES_NO==1) { //======================================================================== testConnect[0] = netAdr; response[0] = 0; send(testConnect, sizeof(testConnect), response); if(response[0] == netAdr) { TST_YES_NO=1; Serial.print("Connect_OK\r\n"); } else { TST_YES_NO=0; Serial.print("Connect_FAIL\r\n"); } //======================================================================== if(TST_YES_NO==1) { delay(100); Access[0] = netAdr; response[0] = 0; send(Access, sizeof(Access), response); if(response[0] == netAdr) { ACCESS_YES_NO=1; Serial.print("Access_OK\r\n"); } else { ACCESS_YES_NO=0; Serial.print("Access_FAIL\r\n"); } } if(ACCESS_YES_NO==1) { String serNum = getSerialNumber(netAdr); Serial.print("s:"+ serNum +"\r\n"); String ARPower = getEnergyT0(netAdr); Serial.print("p:"+ ARPower+"\r\n"); String valFreq = getFreq(netAdr); Serial.print("f:"+ valFreq+"\r\n"); String U = getSuply(netAdr); Serial.print("u:"+ U+"\r\n"); String A = getCurrent(netAdr); Serial.print("a:"+ A+"\r\n"); String Angle = getAngle(netAdr); Serial.print("g:"+ Angle+"\r\n"); String PowerNow = getPowerNow(netAdr); Serial.print("e:"+ PowerNow+"\r\n"); String Tarif1 = getEnergyT1(netAdr); Serial.print("t1:"+ Tarif1+"\r\n"); String Tarif2 = getEnergyT2(netAdr); Serial.print("t2:"+ Tarif2+"\r\n"); String Tarif3 = getEnergyT3(netAdr); Serial.print("t3:"+ Tarif3+"\r\n"); String Tarif4 = getEnergyT4(netAdr); Serial.print("t4:"+ Tarif4+"\r\n"); String PQ = getPowerQ(netAdr); Serial.print("q:"+ PQ+"\r\n"); String PS = getPowerS(netAdr); Serial.print("c:"+ PS+"\r\n"); String CSF = getCosF(netAdr); Serial.print("k:"+ CSF+"\r\n"); } delay(1000); } } String getSerialNumber(int netAdr) { String s1,s2,s3,s4; response[0]=0; Sn[0] = netAdr; send(Sn, sizeof(Sn),response); if((int)response[1] < 10) { s1="0" + String((int)response[1]); } else {s1=String((int)response[1]);} if((int)response[2] < 10) { s2="0" + String((int)response[2]); } else {s2=String((int)response[2]);} if((int)response[3] < 10) { s3="0" + String((int)response[3]); } else {s3=String((int)response[3]);} if((int)response[4] < 10) { s4="0" + String((int)response[4]); } else {s4=String((int)response[4]);} String n = s1+s2+s3+s4; return String(response[0])+";"+n; } String getPowerNow(int netAdr) { response[0]=0; Power[0] = netAdr; send(Power, sizeof(Power),response); long r = 0; int dir_U0=0; int dir_U1=0; int dir_U2=0; int dir_U3=0; if((long)response[1]<<16 == 0x40) dir_U0=1; if((long)response[1]<<16 == 0x80) dir_U0=-1; r |= (long)response[3]<<8; r |= (long)response[2]; String U0= String(r * dir_U0); r = 0; if((long)response[4]<<16 == 0x40) dir_U1=1; if((long)response[4]<<16 == 0x80) dir_U1=-1; r |= (long)response[6]<<8; r |= (long)response[5]; String U1= String(r * dir_U1); r=0; if((long)response[7]<<16 == 0x40) dir_U2=1; if((long)response[7]<<16 == 0x80) dir_U2=-1; r |= (long)response[9]<<8; r |= (long)response[8]; String U2= String(r * dir_U2); r = 0; if((long)response[10]<<16 == 0x40) dir_U3=1; if((long)response[10]<<16 == 0x80) dir_U3=-1; r |= (long)response[12]<<8; r |= (long)response[11]; String U3= String(r * dir_U3); if(response[0] == netAdr) return String(String(response[0])+";"+U0+";"+U1+";"+U2+";"+U3); else return String("Error"); } String getPowerQ(int netAdr) { response[0]=0; PowerQ[0] = netAdr; send(PowerQ, sizeof(PowerQ),response); long r = 0; int dir_U0=0; int dir_U1=0; int dir_U2=0; int dir_U3=0; if((long)response[1]<<16 == 0x40) dir_U0=1; if((long)response[1]<<16 == 0x80) dir_U0=-1; r |= (long)response[3]<<8; r |= (long)response[2]; String U0= String(r * dir_U0); r = 0; if((long)response[4]<<16 == 0x40) dir_U1=1; if((long)response[4]<<16 == 0x80) dir_U1=-1; r |= (long)response[6]<<8; r |= (long)response[5]; String U1= String(r * dir_U1); r=0; if((long)response[7]<<16 == 0x40) dir_U2=1; if((long)response[7]<<16 == 0x80) dir_U2=-1; r |= (long)response[9]<<8; r |= (long)response[8]; String U2= String(r * dir_U2); r = 0; if((long)response[10]<<16 == 0x40) dir_U3=1; if((long)response[10]<<16 == 0x80) dir_U3=-1; r |= (long)response[12]<<8; r |= (long)response[11]; String U3= String(r * dir_U3); if(response[0] == netAdr) return String(String(response[0])+";"+U0+";"+U1+";"+U2+";"+U3); else return String("Error"); } String getPowerS(int netAdr) { response[0]=0; PowerS[0] = netAdr; send(PowerS, sizeof(PowerS),response); long r = 0; int dir_U0=0; int dir_U1=0; int dir_U2=0; int dir_U3=0; if((long)response[1]<<16 == 0x40) dir_U0=1; if((long)response[1]<<16 == 0x80) dir_U0=-1; r |= (long)response[3]<<8; r |= (long)response[2]; String U0= String(r * dir_U0); r = 0; if((long)response[4]<<16 == 0x40) dir_U1=1; if((long)response[4]<<16 == 0x80) dir_U1=-1; r |= (long)response[6]<<8; r |= (long)response[5]; String U1= String(r * dir_U1); r=0; if((long)response[7]<<16 == 0x40) dir_U2=1; if((long)response[7]<<16 == 0x80) dir_U2=-1; r |= (long)response[9]<<8; r |= (long)response[8]; String U2= String(r * dir_U2); r = 0; if((long)response[10]<<16 == 0x40) dir_U3=1; if((long)response[10]<<16 == 0x80) dir_U3=-1; r |= (long)response[12]<<8; r |= (long)response[11]; String U3= String(r * dir_U3); if(response[0] == netAdr) return String(String(response[0])+";"+U0+";"+U1+";"+U2+";"+U3); else return String("Error"); } String getCosF(int netAdr) { response[0]=0; CosF[0] = netAdr; send(CosF, sizeof(CosF),response); long r = 0; int dir_U0=0; int dir_U1=0; int dir_U2=0; int dir_U3=0; if((long)response[1]<<16 == 0x40) dir_U0=1; if((long)response[1]<<16 == 0x80) dir_U0=-1; r |= (long)response[3]<<8; r |= (long)response[2]; String U0= String(r * dir_U0); r = 0; if((long)response[4]<<16 == 0x40) dir_U1=1; if((long)response[4]<<16 == 0x80) dir_U1=-1; r |= (long)response[6]<<8; r |= (long)response[5]; String U1= String(r * dir_U1); r=0; if((long)response[7]<<16 == 0x40) dir_U2=1; if((long)response[7]<<16 == 0x80) dir_U2=-1; r |= (long)response[9]<<8; r |= (long)response[8]; String U2= String(r * dir_U2); r = 0; if((long)response[10]<<16 == 0x40) dir_U3=1; if((long)response[10]<<16 == 0x80) dir_U3=-1; r |= (long)response[12]<<8; r |= (long)response[11]; String U3= String(r * dir_U3); if(response[0] == netAdr) return String(String(response[0])+";"+U0+";"+U1+";"+U2+";"+U3); else return String("Error"); } String getAngle(int netAdr) { response[0]=0; Angle[0] = netAdr; send(Angle, sizeof(Angle),response); long r = 0; r |= (long)response[1]<<16; r |= (long)response[3]<<8; r |= (long)response[2]; String U1= String(r); r = 0; r |= (long)response[4]<<16; r |= (long)response[6]<<8; r |= (long)response[5]; String U2= String(r); r=0; r |= (long)response[7]<<16; r |= (long)response[9]<<8; r |= (long)response[8]; String U3= String(r); if(response[0] == netAdr) return String(String(response[0])+";"+U1+";"+U2+";"+U3); else return String("Error"); } String getCurrent(int netAdr) { response[0]=0; Current[0] = netAdr; send(Current, sizeof(Current),response); long r = 0; r |= (long)response[1]<<16; r |= (long)response[3]<<8; r |= (long)response[2]; String U1= String(r); r = 0; r |= (long)response[4]<<16; r |= (long)response[6]<<8; r |= (long)response[5]; String U2= String(r); r=0; r |= (long)response[7]<<16; r |= (long)response[9]<<8; r |= (long)response[8]; String U3= String(r); if(response[0] == netAdr) return String(String(response[0])+";"+U1+";"+U2+";"+U3); else return String("Error"); } String getSuply(int netAdr) { response[0]=0; Suply[0] = netAdr; send(Suply, sizeof(Suply),response); long r = 0; r |= (long)response[1]<<16; r |= (long)response[3]<<8; r |= (long)response[2]; String U1= String(r); r = 0; r |= (long)response[4]<<16; r |= (long)response[6]<<8; r |= (long)response[5]; String U2= String(r); r=0; r |= (long)response[7]<<16; r |= (long)response[9]<<8; r |= (long)response[8]; String U3= String(r); if(response[0] == netAdr) return String(String(response[0])+";"+U1+";"+U2+";"+U3); else return String("Error"); } String getFreq(int netAdr) { response[0]=0; Freq[0] = netAdr; send(Freq, sizeof(Freq),response); long r = 0; r |= (long)response[1]<<16; r |= (long)response[3]<<8; r |= (long)response[2]; String fr= String(r); //return fr; if(response[0] == netAdr) return String(response[0])+";"+fr; else return String("Error"); } String getEnergyT0(int netAdr) { response[0]=0; energyT0[0] = netAdr; send(energyT0, sizeof(energyT0),response); if(response[0] == netAdr) { long r = 0; r |= (long)response[2]<<24; r |= (long)response[1]<<16; r |= (long)response[4]<<8; r |= (long)response[3]; String A_plus= String(r); r=0; r |= (long)response[6]<<24; r |= (long)response[5]<<16; r |= (long)response[8]<<8; r |= (long)response[7]; String A_minus= String(r); r = 0; r |= (long)response[10]<<24; r |= (long)response[9]<<16; r |= (long)response[12]<<8; r |= (long)response[11]; String R_plus= String(r); r = 0; r |= (long)response[14]<<24; r |= (long)response[13]<<16; r |= (long)response[16]<<8; r |= (long)response[15]; String R_minus= String(r); return String(String(response[0])+";"+A_plus+";"+A_minus+";"+R_plus+";"+R_minus); } else return String("Error"); } String getEnergyT1(int netAdr) { response[0]=0; energyT1[0] = netAdr; send(energyT1, sizeof(energyT1),response); if(response[0] == netAdr) { long r = 0; r |= (long)response[2]<<24; r |= (long)response[1]<<16; r |= (long)response[4]<<8; r |= (long)response[3]; String A_plus= String(r); r=0; r |= (long)response[6]<<24; r |= (long)response[5]<<16; r |= (long)response[8]<<8; r |= (long)response[7]; String A_minus= String(r); r = 0; r |= (long)response[10]<<24; r |= (long)response[9]<<16; r |= (long)response[12]<<8; r |= (long)response[11]; String R_plus= String(r); r = 0; r |= (long)response[14]<<24; r |= (long)response[13]<<16; r |= (long)response[16]<<8; r |= (long)response[15]; String R_minus= String(r); return String(String(response[0])+";"+A_plus+";"+A_minus+";"+R_plus+";"+R_minus); } else return String("Error"); } String getEnergyT2(int netAdr) { response[0]=0; energyT2[0] = netAdr; send(energyT2, sizeof(energyT2),response); if(response[0] == netAdr) { long r = 0; r |= (long)response[2]<<24; r |= (long)response[1]<<16; r |= (long)response[4]<<8; r |= (long)response[3]; String A_plus= String(r); r=0; r |= (long)response[6]<<24; r |= (long)response[5]<<16; r |= (long)response[8]<<8; r |= (long)response[7]; String A_minus= String(r); r = 0; r |= (long)response[10]<<24; r |= (long)response[9]<<16; r |= (long)response[12]<<8; r |= (long)response[11]; String R_plus= String(r); r = 0; r |= (long)response[14]<<24; r |= (long)response[13]<<16; r |= (long)response[16]<<8; r |= (long)response[15]; String R_minus= String(r); return String(String(response[0])+";"+A_plus+";"+A_minus+";"+R_plus+";"+R_minus); } else return String("Error"); } String getEnergyT3(int netAdr) { response[0]=0; energyT3[0] = netAdr; send(energyT3, sizeof(energyT3),response); if(response[0] == netAdr) { long r = 0; r |= (long)response[2]<<24; r |= (long)response[1]<<16; r |= (long)response[4]<<8; r |= (long)response[3]; String A_plus= String(r); r=0; r |= (long)response[6]<<24; r |= (long)response[5]<<16; r |= (long)response[8]<<8; r |= (long)response[7]; String A_minus= String(r); r = 0; r |= (long)response[10]<<24; r |= (long)response[9]<<16; r |= (long)response[12]<<8; r |= (long)response[11]; String R_plus= String(r); r = 0; r |= (long)response[14]<<24; r |= (long)response[13]<<16; r |= (long)response[16]<<8; r |= (long)response[15]; String R_minus= String(r); return String(String(response[0])+";"+A_plus+";"+A_minus+";"+R_plus+";"+R_minus); } else return String("Error"); } String getEnergyT4(int netAdr) { response[0]=0; energyT4[0] = netAdr; send(energyT4, sizeof(energyT4),response); if(response[0] == netAdr) { long r = 0; r |= (long)response[2]<<24; r |= (long)response[1]<<16; r |= (long)response[4]<<8; r |= (long)response[3]; String A_plus= String(r); r=0; r |= (long)response[6]<<24; r |= (long)response[5]<<16; r |= (long)response[8]<<8; r |= (long)response[7]; String A_minus= String(r); r = 0; r |= (long)response[10]<<24; r |= (long)response[9]<<16; r |= (long)response[12]<<8; r |= (long)response[11]; String R_plus= String(r); r = 0; r |= (long)response[14]<<24; r |= (long)response[13]<<16; r |= (long)response[16]<<8; r |= (long)response[15]; String R_minus= String(r); return String(String(response[0])+";"+A_plus+";"+A_minus+";"+R_plus+";"+R_minus); } else return String("Error"); } ////////////////////////////////////////////////////////////////////////////////// void send(byte *cmd, int s, byte *response) { // Serial.print("sending..."); unsigned int crc = crc16MODBUS(cmd, s); unsigned int crc1 = crc & 0xFF; unsigned int crc2 = (crc>>8) & 0xFF; delay(10); digitalWrite(SerialControl, RS485Transmit); // Init Transceiver for(int i=0; i<s; i++) { RS485Serial.write(cmd[i]); } RS485Serial.write(crc1); RS485Serial.write(crc2); byte i = 0; digitalWrite(SerialControl, RS485Receive); // Init Transceiver delay(200); if (RS485Serial.available()) { while (RS485Serial.available()) { byteReceived= RS485Serial.read(); // Read received byte delay(10); response[i++] = byteReceived; } } delay(20); } unsigned int crc16MODBUS(byte *s, int count) { unsigned int crcTable[] = { 0x0000, 0xC0C1, 0xC181, 0x0140, 0xC301, 0x03C0, 0x0280, 0xC241, 0xC601, 0x06C0, 0x0780, 0xC741, 0x0500, 0xC5C1, 0xC481, 0x0440, 0xCC01, 0x0CC0, 0x0D80, 0xCD41, 0x0F00, 0xCFC1, 0xCE81, 0x0E40, 0x0A00, 0xCAC1, 0xCB81, 0x0B40, 0xC901, 0x09C0, 0x0880, 0xC841, 0xD801, 0x18C0, 0x1980, 0xD941, 0x1B00, 0xDBC1, 0xDA81, 0x1A40, 0x1E00, 0xDEC1, 0xDF81, 0x1F40, 0xDD01, 0x1DC0, 0x1C80, 0xDC41, 0x1400, 0xD4C1, 0xD581, 0x1540, 0xD701, 0x17C0, 0x1680, 0xD641, 0xD201, 0x12C0, 0x1380, 0xD341, 0x1100, 0xD1C1, 0xD081, 0x1040, 0xF001, 0x30C0, 0x3180, 0xF141, 0x3300, 0xF3C1, 0xF281, 0x3240, 0x3600, 0xF6C1, 0xF781, 0x3740, 0xF501, 0x35C0, 0x3480, 0xF441, 0x3C00, 0xFCC1, 0xFD81, 0x3D40, 0xFF01, 0x3FC0, 0x3E80, 0xFE41, 0xFA01, 0x3AC0, 0x3B80, 0xFB41, 0x3900, 0xF9C1, 0xF881, 0x3840, 0x2800, 0xE8C1, 0xE981, 0x2940, 0xEB01, 0x2BC0, 0x2A80, 0xEA41, 0xEE01, 0x2EC0, 0x2F80, 0xEF41, 0x2D00, 0xEDC1, 0xEC81, 0x2C40, 0xE401, 0x24C0, 0x2580, 0xE541, 0x2700, 0xE7C1, 0xE681, 0x2640, 0x2200, 0xE2C1, 0xE381, 0x2340, 0xE101, 0x21C0, 0x2080, 0xE041, 0xA001, 0x60C0, 0x6180, 0xA141, 0x6300, 0xA3C1, 0xA281, 0x6240, 0x6600, 0xA6C1, 0xA781, 0x6740, 0xA501, 0x65C0, 0x6480, 0xA441, 0x6C00, 0xACC1, 0xAD81, 0x6D40, 0xAF01, 0x6FC0, 0x6E80, 0xAE41, 0xAA01, 0x6AC0, 0x6B80, 0xAB41, 0x6900, 0xA9C1, 0xA881, 0x6840, 0x7800, 0xB8C1, 0xB981, 0x7940, 0xBB01, 0x7BC0, 0x7A80, 0xBA41, 0xBE01, 0x7EC0, 0x7F80, 0xBF41, 0x7D00, 0xBDC1, 0xBC81, 0x7C40, 0xB401, 0x74C0, 0x7580, 0xB541, 0x7700, 0xB7C1, 0xB681, 0x7640, 0x7200, 0xB2C1, 0xB381, 0x7340, 0xB101, 0x71C0, 0x7080, 0xB041, 0x5000, 0x90C1, 0x9181, 0x5140, 0x9301, 0x53C0, 0x5280, 0x9241, 0x9601, 0x56C0, 0x5780, 0x9741, 0x5500, 0x95C1, 0x9481, 0x5440, 0x9C01, 0x5CC0, 0x5D80, 0x9D41, 0x5F00, 0x9FC1, 0x9E81, 0x5E40, 0x5A00, 0x9AC1, 0x9B81, 0x5B40, 0x9901, 0x59C0, 0x5880, 0x9841, 0x8801, 0x48C0, 0x4980, 0x8941, 0x4B00, 0x8BC1, 0x8A81, 0x4A40, 0x4E00, 0x8EC1, 0x8F81, 0x4F40, 0x8D01, 0x4DC0, 0x4C80, 0x8C41, 0x4400, 0x84C1, 0x8581, 0x4540, 0x8701, 0x47C0, 0x4680, 0x8641, 0x8201, 0x42C0, 0x4380, 0x8341, 0x4100, 0x81C1, 0x8081, 0x4040 }; unsigned int crc = 0xFFFF; for(int i = 0; i < count; i++) { crc = ((crc >> 8) ^ crcTable[(crc ^ s[i]) & 0xFF]); } return crc; }
スマートフォンソフトウェア。
Androidアプリケーションをインストールした後、スマートフォンのアプリケーションメニューで、見つける必要がある
「M-230」という名前のショートカットを使用して、プログラムを実行します。
開いたアプリケーションで、「チーム」という単語の横にあるドロップダウンメニューをクリックします
その後、コマンドのリストが表示されます。
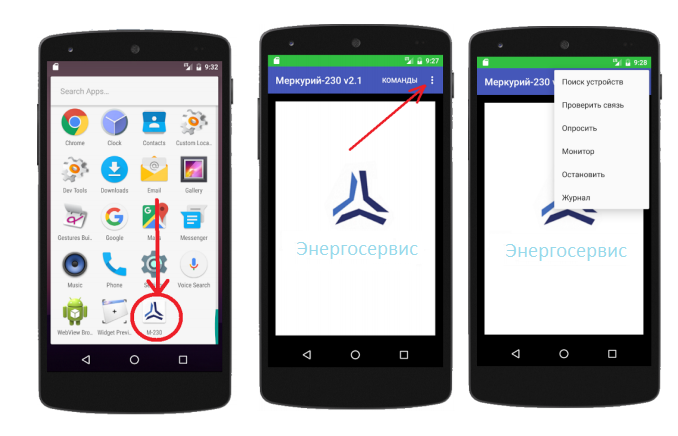
デバイスの検索-利用可能なBluetoothデバイスの検索が行われ、提案されます
接続します。
通信の確認 -コンバーターとの通信を確認するコマンド
問い合わせ-指定されたネットワークアドレスでのカウンターの単一の問い合わせ。
モニター -指定されたネットワークアドレスでの1つのデバイスの継続的な周期的なポーリング(オンラインモード)。
停止 -周期的なポーリングを停止します。
ログ -プログラムの下部にある交換ログのデータの受信を監視する機能がオンまたはオフになります。

→これがAndroid Studioのプロジェクトファイルです