
私が独力で学んだことはすべて、それを実現するだけでなく、1日以上にわたって機能させ、長期的な利益をもたらすよう努めています。
かつては、間に合わせのスタンピングラインの管理を整理する必要がありました。 自家製のライン、したがってコントロール、自家製を作ります。 データ転送に業界標準を使用しませんでした。 即興の素材から不要な古いコンピューターまで、すべてを行うことが決定されました。 主な条件:シンプル、安い、速い。 信頼性-方法 どうやってやったか教えてあげましょう。
スタンピングライン
スタンピングラインは、油圧シリンダー(メインムーブメント)を備えた4つのブロックと、空気圧シリンダー(ワークフィード)を備えた2つのブロックで構成されています。 コンストラクトについては説明しません。 私は、シリンダーが24ボルトのディストリビューターによって制御されていることに注意してください。
Line.GIFのスタンプ 
運営管理
タスクは、与えられたアルゴリズムに従ってシリンダーを動作させることです。 作業の移動、一時停止など。 5つの制御信号(4つの水力と1つの空気)を取得する必要があります。 Atmega8マイクロコントローラーをコンピューターとすべてのハードウェア間の接続要素として使用することにしました。
スキームは次のとおりです。
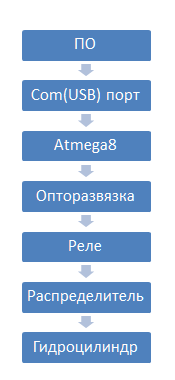
すべてのシリンダーはAからEまでマークされています。したがって、それ以上の苦労なしに、コントローラーに手紙を送ることが決定されました。 彼はソフトウェアを聴き、文字Aが届くと、シリンダーAに信号を送り、すべてのシリンダーに信号を送ります。 また、水力発電所のタンク内のオイルの温度を制御する機能が追加されました。 夏には、ワークショップは暑く、オイルが過熱することがあるため、このような機能を追加することにしました。 彼らは通常のDS1820を使用し、金属製タンクの熱伝導グリースに付着しました。 オイルとタンクの温度差は、プログラムレベルで検出されました。 測定誤差は約2 Cです。私たちにとっては-それだけです。
彼らは簡単なソフトウェアを広めました。 その中で最も難しいのは、comポートを介したデータ転送です。 管理プログラムは、それを呼び出す場合、通常のtxtに保存されます。
これがソフトウェアインターフェースの外観です。

不名誉になるまでプログラムをコンパイルするプロセスは簡単です。 プログラム内のオペレーターは、特定のシリンダーに関連付けられたボタンを直接押します。 移動の間隔は、ms単位で一時停止します。 一時停止は、シリンダーがストローク後に元の状態に戻るために必要です。 はい、フィードバックはありません。 必要ありません。
制御プログラム自体は次のようになります。
A 1000 E 1250 E 1250 ...
シリンダーA | 一時停止1000ミリ秒| シリンダーストロークE | ...
オペレーターがスタートを押した後、サイクルが開始されます。 サイクルは無限であり、シリンダーストロークのカウンターに結び付けられるか、単に終了するまでの時間を設定します。 プログラムはテキストファイルを解析し、文字をマイクロコントローラーに送信します。
ほとんどの読者は、メガなどの脚を引っ張る方法を想像できると確信しています。 コントローラのファームウェアについては説明しません。
動作中のソフトウェア.GIF 
おわりに
自家製作品2年。 障害はありません。 かつて、USB-Comアダプターのマイクロコントローラーを搭載したボードが振動から脱落しました。 古いロシアの伝統に従って排除-粘着テープと電気テープで。
私的(小規模)生産で10年以上働いており、同様の近隣組織を観察していると、私たちは自家製労働者とのつながりが非常に乏しいという結論に達しました。 私たちは、小企業の自動化と革新にひどく欠けています。 誰もがシリコンスタートアップを好んでおり、複雑なロボットを作ったり機械を訓練したりして考えています。 あなたとあなたの発明を待っているネイティブのワークショップと工場に、あなたははるかに多くの利益をもたらすと思われます。