
Blue Frog Roboticsは2年前にパリで設立されたスタートアップです。 彼は現在、バディを開発しています。 開発者は、ソーシャルロボットとしてのバディが家族のすべてのメンバーを団結させて保護し、それぞれと対話していると主張しています。
2015年のクラウドファンディングキャンペーン中に、Blue Frogは1日で100,000ドルの計画額を引き上げ、キャンペーン終了までに620,000ドルに引き上げました。 プリセールスはBlue Frog Webサイトで継続され、合計で150万ドルに達しました。
Buddyの配布はBlue Frog Roboticsにとどまり、ロボットの販売はさまざまな地域の店舗チェーンを通じて行われます。 そのため、世界中のBuddyロボットの実際の展開と使用を考慮したシステムを作成することが重要です。 これにより、人気度に応じて最適なレベルのサービスが提供されます。
クラウドソリューションは、収集されたデータ(消費、センサーなど)を保存し、ロボットの最初の2,200コピーが適切に機能するために必要なさまざまなサービスを提供します。 デバイスを効果的に動作させるには、信頼性が高くスケーラブルな内部システムが必要です。 さらに、手頃な価格のソリューションと最適なサービス品質を提供するアーキテクチャを開発することが重要です。
ハックフェストの期間中、Blue Frog RoboticsとMicrosoft DX Franceは、生産の観点からソリューションを共同開発しました。これについては、以下で説明します。

BUDDYについて
Buddyは一般的なツール(Arduino、OpenCV、Unity 3D)を使用して開発され、開発者がプロジェクトを簡単に作成できるようにしました。 また、クリエイターは現在、フル機能のAPIを実装しています。 ソフトウェアに加えて、ロボットと対話するために、開発者はハードウェアソリューションを作成できます。
このキットには、家族が遠くからバディに連絡するためのモバイルコンパニオンアプリが含まれており、ビデオ監視、ビデオ通話、リモートコントロールをサポートしています。 C#とUnity 3Dを使用して開発され、iOS、Android、Windowsで利用可能になります。
バディの機能:
- 高さ56 cm、重量5 kg、バッテリー寿命-8〜10時間。
- Integrated Brain-ワイヤレスネットワークとBluetoothを内蔵した8インチのスマートタブレットPC。
- Arduinoプラットフォームを使用して、ロボットの機械コンポーネントは脳のコマンドを実行します。
- 3つの車輪と多くのセンサーが完全なモビリティを提供します。ロボットは、外の世界を移動し、学習し、相互作用できます。
- 3Dビジョンテクノロジー。 標準カメラ、赤外線カメラ、赤外線レーザーエミッタの助けを借りて、バディは手と頭の動きを簡単に追跡して認識し、オブジェクト、顔、動物、植物などを区別し、視界にあるオブジェクトの深度を測定します。
- 最先端の人工知能技術により、顔、オブジェクトを認識し、動きを追跡できます。
- ロボットは聞く、話す、うなずくことができます。
- ロボットには個性があり、さまざまな感情の助けを借りて起こっていることに反応するため、家族とのやり取りが向上します。 感情の表出における騎兵の高レベル。 寒さから、彼は歯を叩くことさえできます!
データ型
バディは2種類のデータをクラウドに送信します。
プロファイルおよびコンテキストデータは、同期またはバックアップのためにバディまたはコンパニオンアプリケーションによって作成されたデータのセットです(マップデータ、ユーザープロファイルなど)。 このデータは、低いリクエストレートで読み書きするように設定され、JSON形式で保存されます。
技術データと使用情報は、タブレットPCとArduinoカードがロボットの技術インジケーターから受信したデータです(たとえば、バッテリーレベル、場所、サーボモーターの動作)。 このデータは高頻度で送信され、JSON形式で変更および書き込むことはできません。 データはBase64システムでエンコードされるため、メッセージの長さが短くなります。
アーキテクチャの作成
アーキテクチャを作成するための主な基準:コスト、スケーラビリティ、およびセキュリティ。 したがって、インフラストラクチャコストを最小限に抑えることが重要です。
関連するすべての技術的側面について、ロボットのグローバル展開中のパフォーマンスの問題を回避するためにスケーリングを検討する必要があります。
セキュリティの観点から、Buddyソフトウェアはいくつかのタイプのデータ暗号化と分離を実装しています。 クラウドでの保護を保証するために、送信されるデータは匿名であり、データの読み取りおよび書き込み機能は承認されたシステムに対してのみ存在します。
選択したアーキテクチャを展開するときに、3つの領域が特定されました。
- BLOBストレージ:共有署名(SAS)を使用して、バイナリ形式からデータを保存および復元します。
- メッセージの収集:イベントログ、コマンド、監視結果からレコードを収集し、Power BIレポートを作成します。
- 自動化:継続的なインフラストラクチャ展開のために、すべてのAzure Resource Managerファイルと自動化スクリプトを作成します。
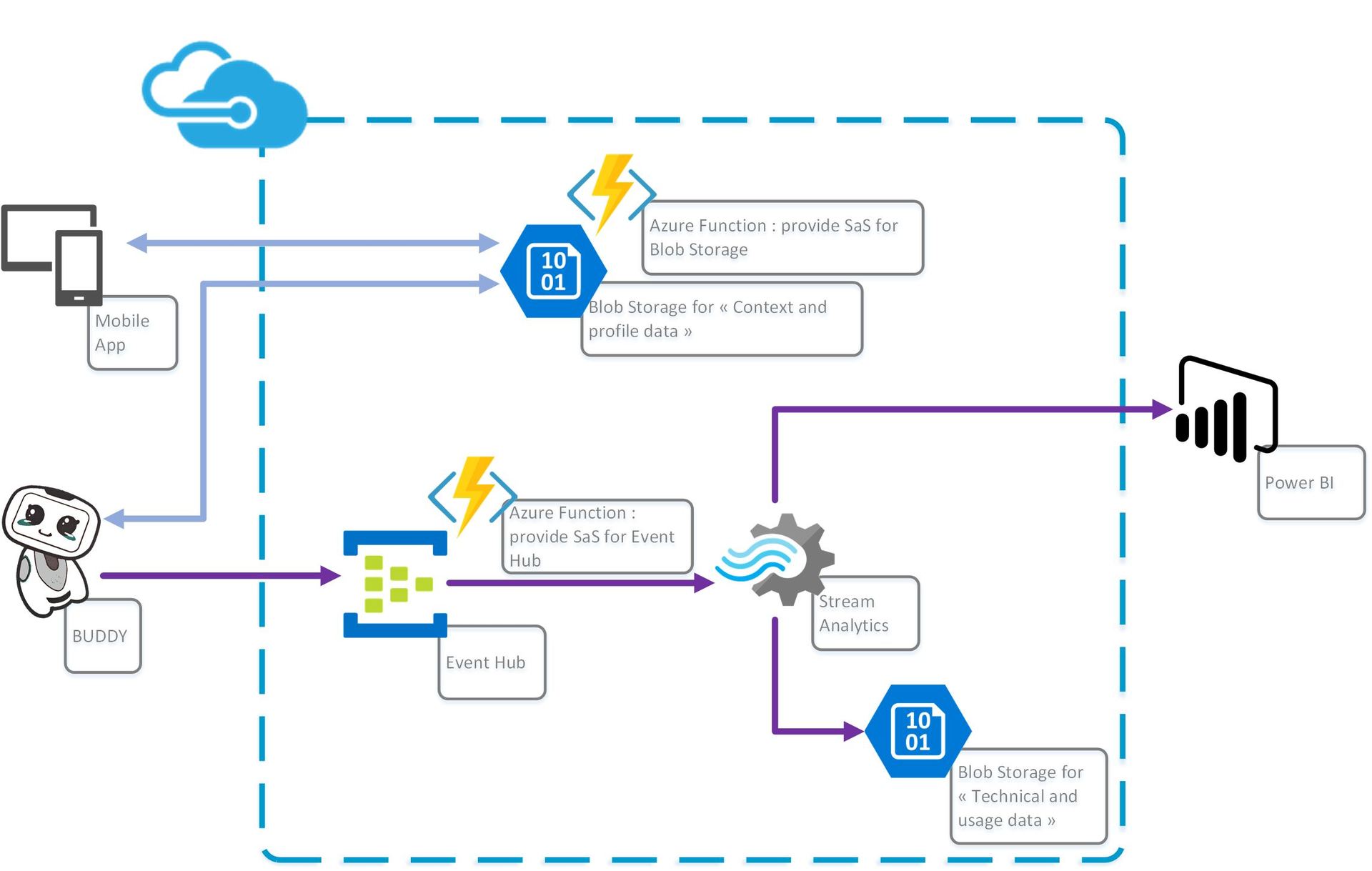
メッセージング:ロボットからPower BIへ
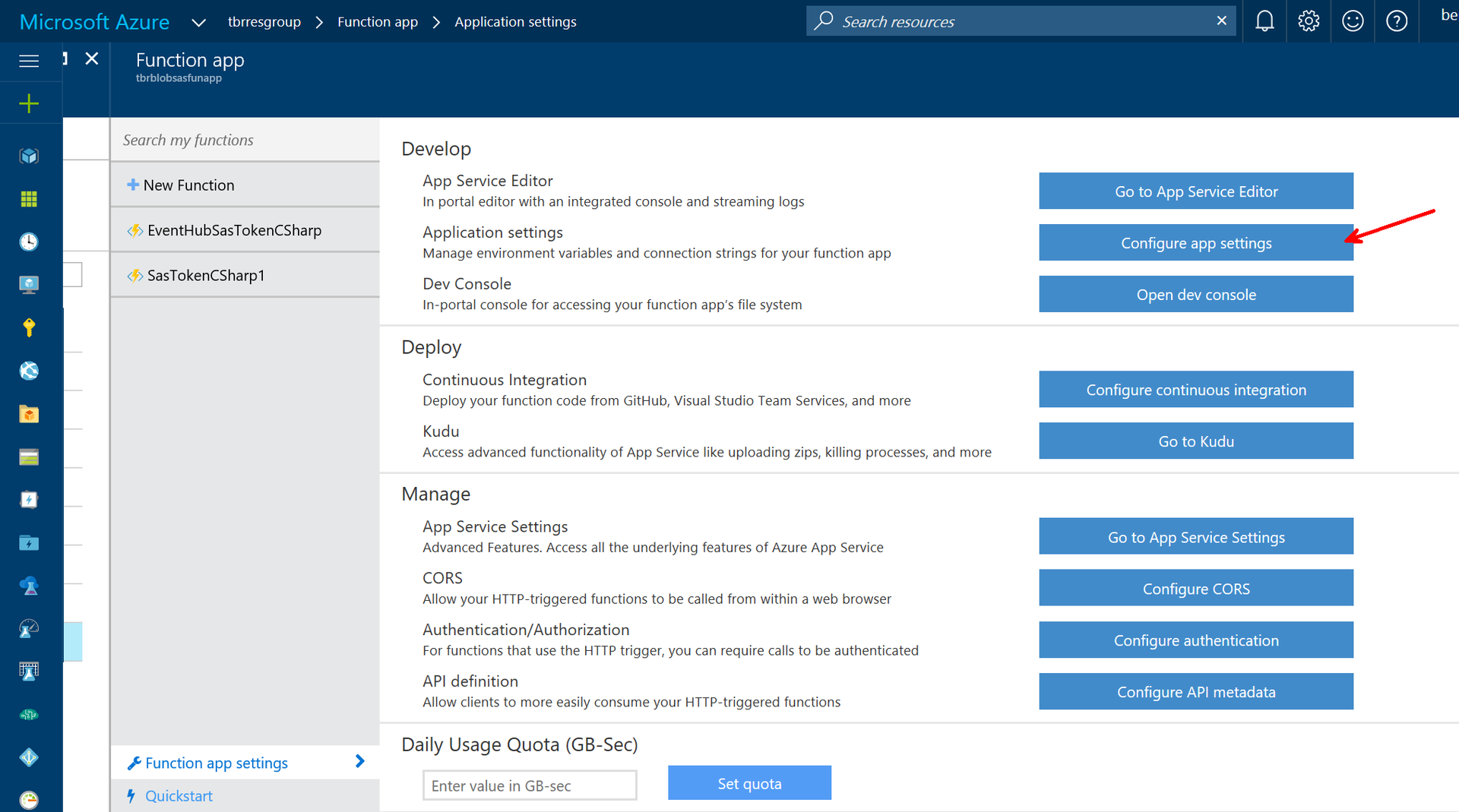
データレシーバーとしてイベントハブが選択されました。 イベントハブにメッセージを送信するには、各バディが共有署名を受信する必要があります。 SASはAzure Functionを使用して渡されます。
サンプルAzure関数コード:
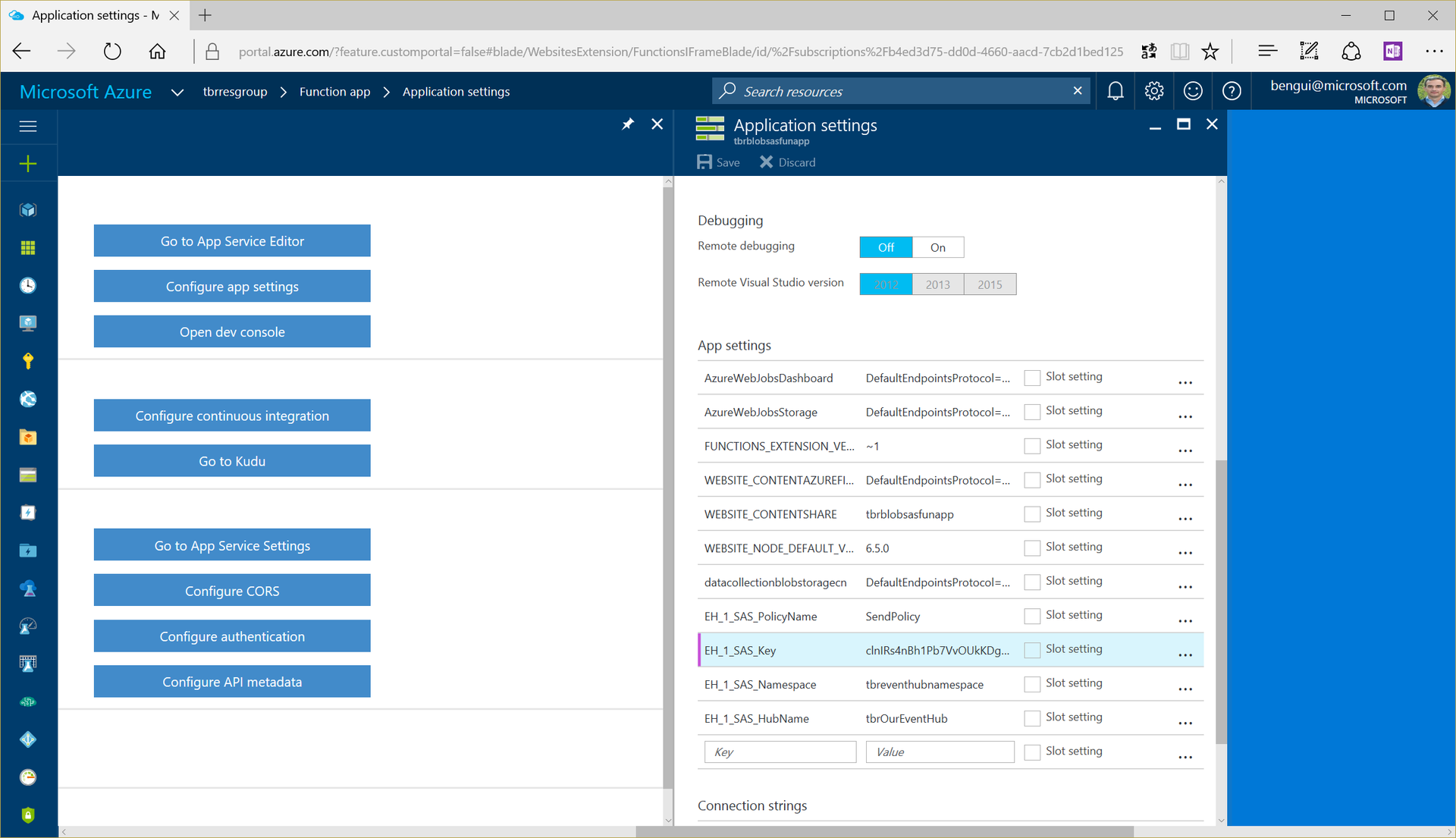
#r "Microsoft.ServiceBus" using System.Net; using Microsoft.ServiceBus; using System.Configuration; public static async Task<HttpResponseMessage> Run(HttpRequestMessage req, TraceWriter log) { log.Info("Generate Shared Access Signature for Event Hub"); // parse query parameter string publisherName = req.GetQueryNameValuePairs() .FirstOrDefault(q => string.Compare(q.Key, "publisherName", true) == 0) .Value; string tokenTimeToLiveParam = req.GetQueryNameValuePairs() .FirstOrDefault(q => string.Compare(q.Key, "tokenTimeToLive", true) == 0) .Value; // Get request body dynamic data = await req.Content.ReadAsAsync<object>(); // Set name to query string or body data publisherName = publisherName ?? data?.publisherName; tokenTimeToLiveParam = tokenTimeToLiveParam ?? data?.tokenTimeToLive; if( publisherName == null) return req.CreateResponse(HttpStatusCode.BadRequest, "Please pass a publisherName on the query string or in the request body"); TimeSpan tokenTimeToLive; if( tokenTimeToLiveParam == null) {tokenTimeToLive = TimeSpan.FromMinutes(60);} else {tokenTimeToLive = TimeSpan.FromMinutes(double.Parse(tokenTimeToLiveParam));} var appSettings = ConfigurationManager.AppSettings; var sas = CreateForHttpSender( appSettings["EH_1_SAS_PolicyName"], appSettings["EH_1_SAS_Key"], appSettings["EH_1_SAS_Namespace"], appSettings["EH_1_SAS_HubName"], publisherName, tokenTimeToLive); if (string.IsNullOrEmpty(sas)) {return req.CreateResponse(HttpStatusCode.NoContent, "No SaS found!");} else {return req.CreateResponse(HttpStatusCode.OK, sas);} } public static string CreateForHttpSender(string senderKeyName, string senderKey, string serviceNamespace, string hubName, string publisherName, TimeSpan tokenTimeToLive) { var serviceUri = ServiceBusEnvironment.CreateServiceUri("https", serviceNamespace, String.Format("{0}/publishers/{1}/messages", hubName, publisherName)) .ToString() .Trim('/'); return SharedAccessSignatureTokenProvider.GetSharedAccessSignature(senderKeyName, senderKey, serviceUri, tokenTimeToLive); }
ロボットはデータをイベントハブに送信します。
Unity 3Dアプリケーションを使用して、ロボットはAzure Functionの上に作成されたSASトークンを受け取ります。
``` /// Methode call with StartCoroutine(); private IEnumerator GetSaS(string publisherName) { WWW wwwSas = new WWW(string.Format("https://tbrblobsasfunapp.azurewebsites.net/api/EventHubSasTokenCSharp?code=YourAccessKey&publisherName={0}", publisherName)); yield return wwwSas; // check for errors if (wwwSas.error == null) { SaS = wwwSas.text.Trim(new Char[] { ' ', '\"' }); Debug.Log("Get SaS OK: " + wwwSas.text.Trim(new Char[] { ' ', '\"' })); } else { Debug.Log("Get SaS Error: " + wwwSas.error); } } ```
この関数には、イベントハブコントロールキーがあります。
データは、UnityからのWeb要求を介して送信されます。 これはcURLと同等です:

Azure Event Hubへのデータフロー:

これらは、Azure Stream Analyticsを介してさらに処理されます。
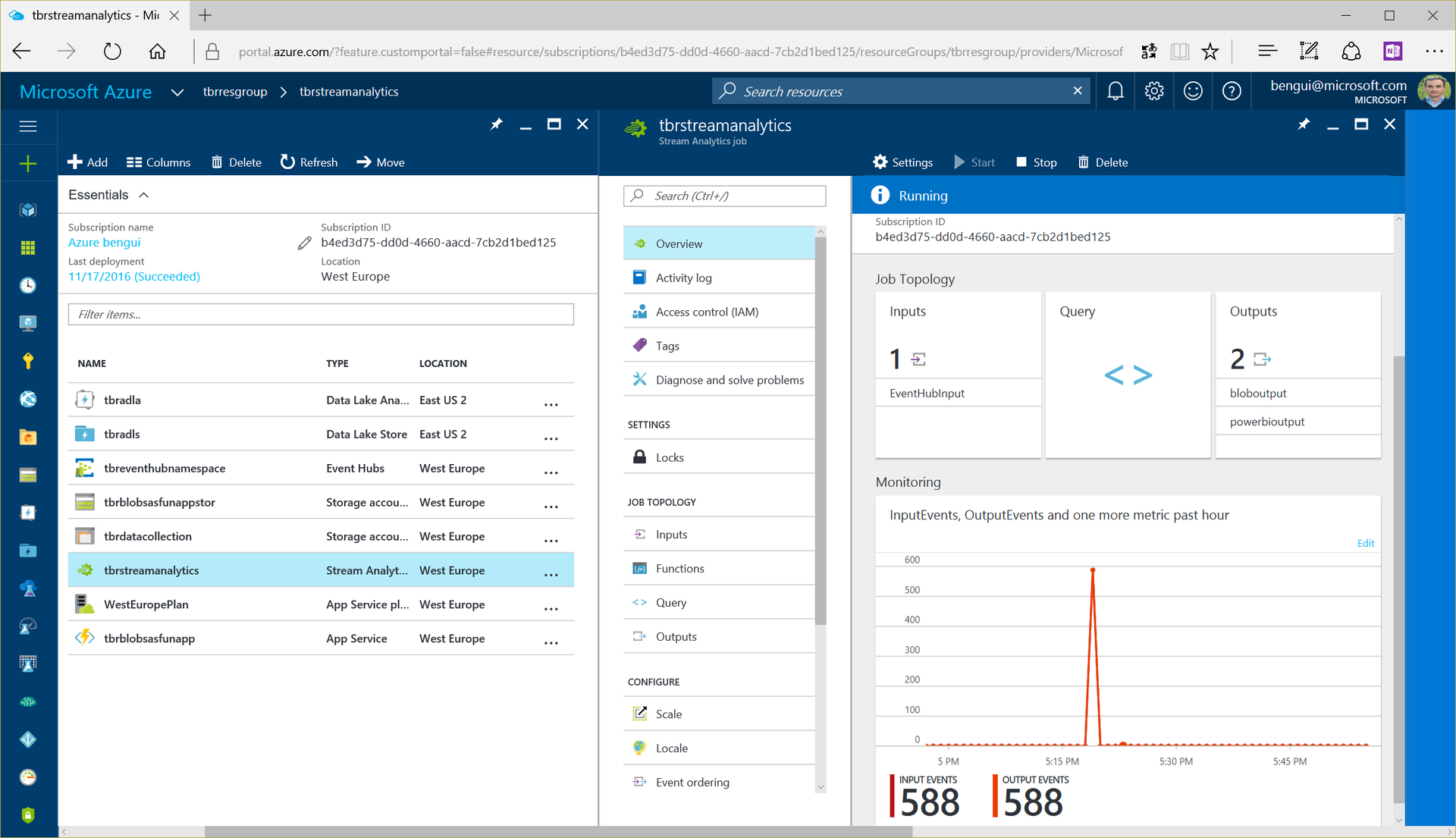
Azure Stream Analyticsは、すべてのデータのコピーをblobストレージに送信します。
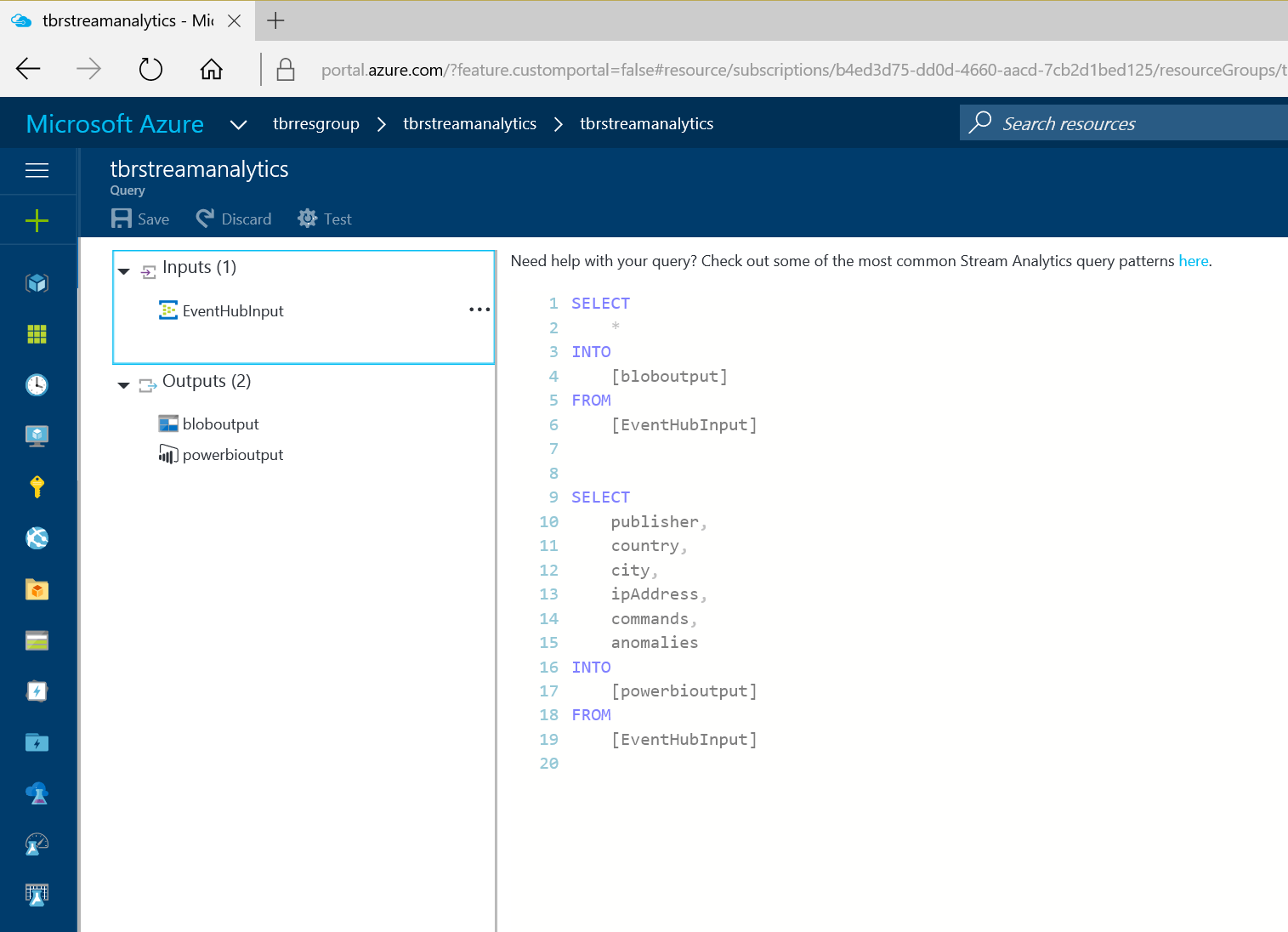
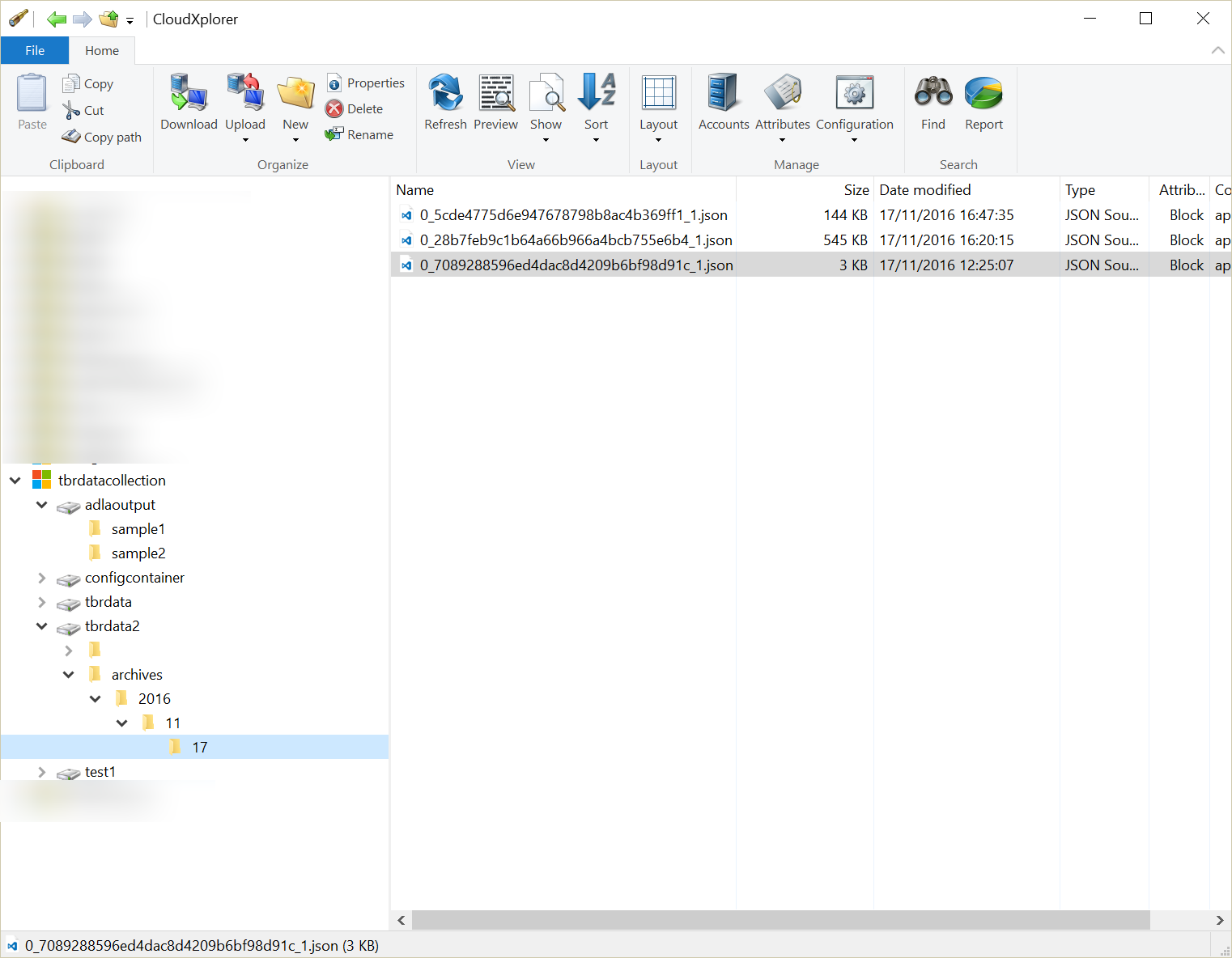
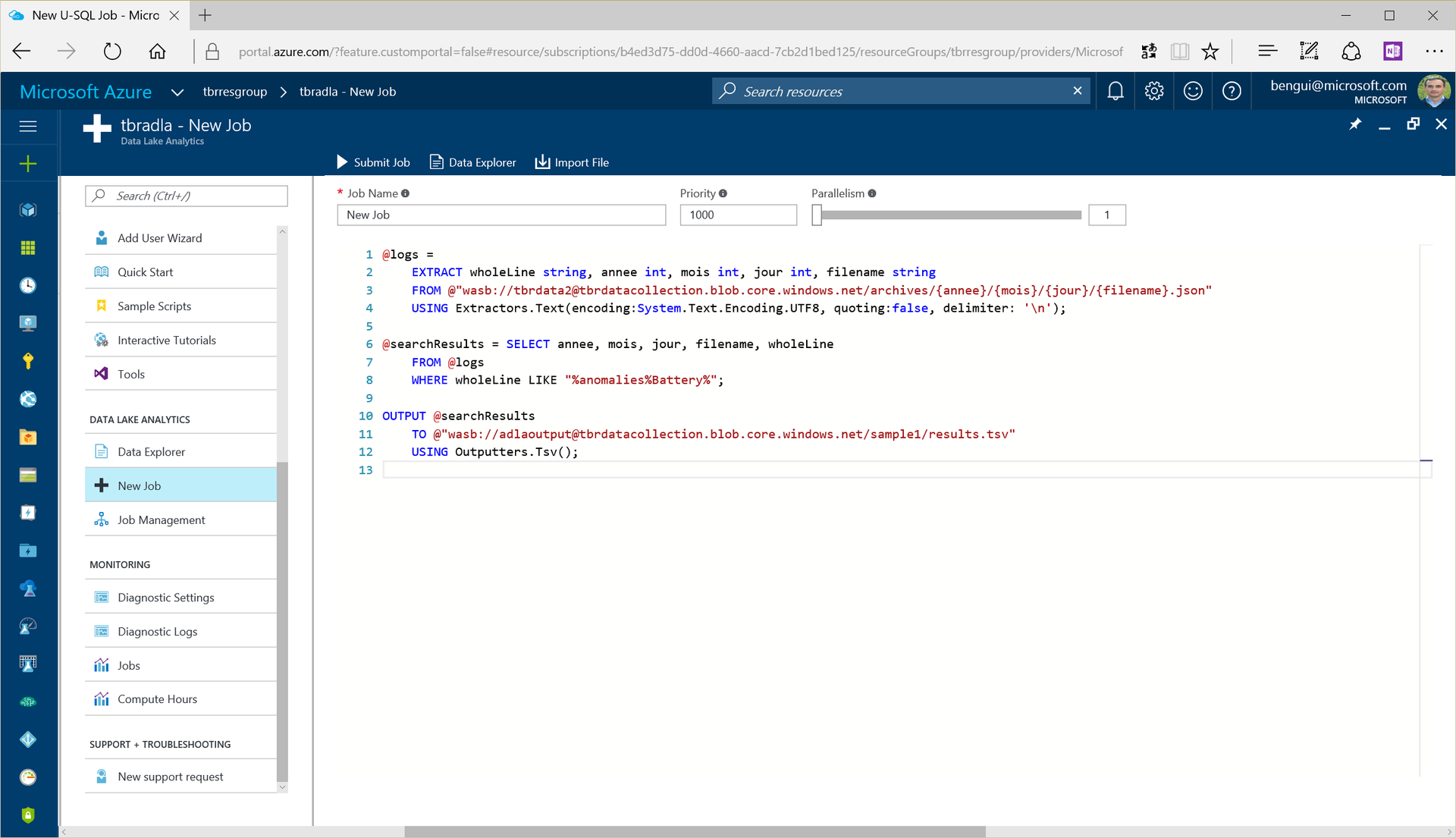
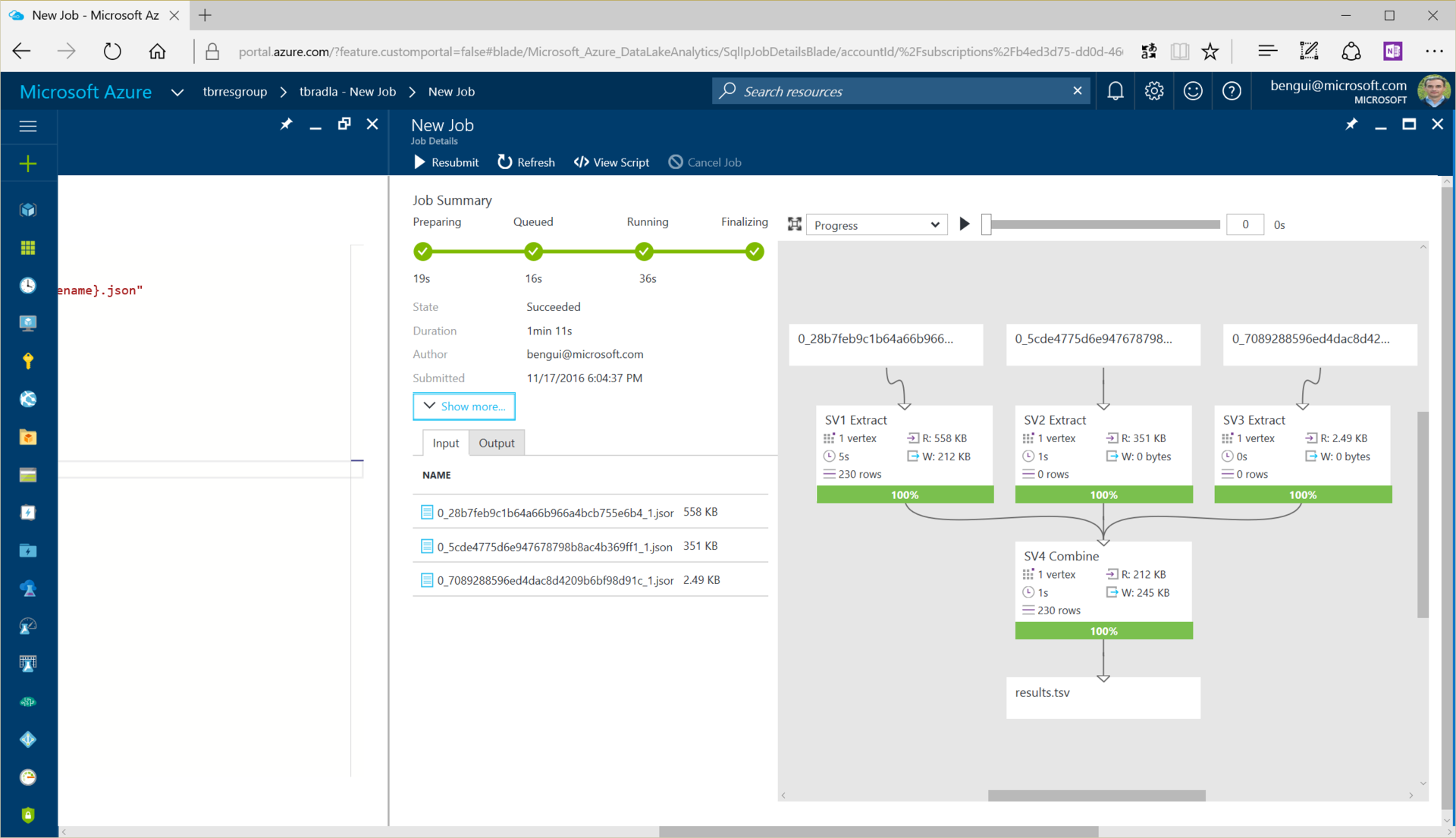
Azure Data Lake Analyticsは、データの検索に使用されます。

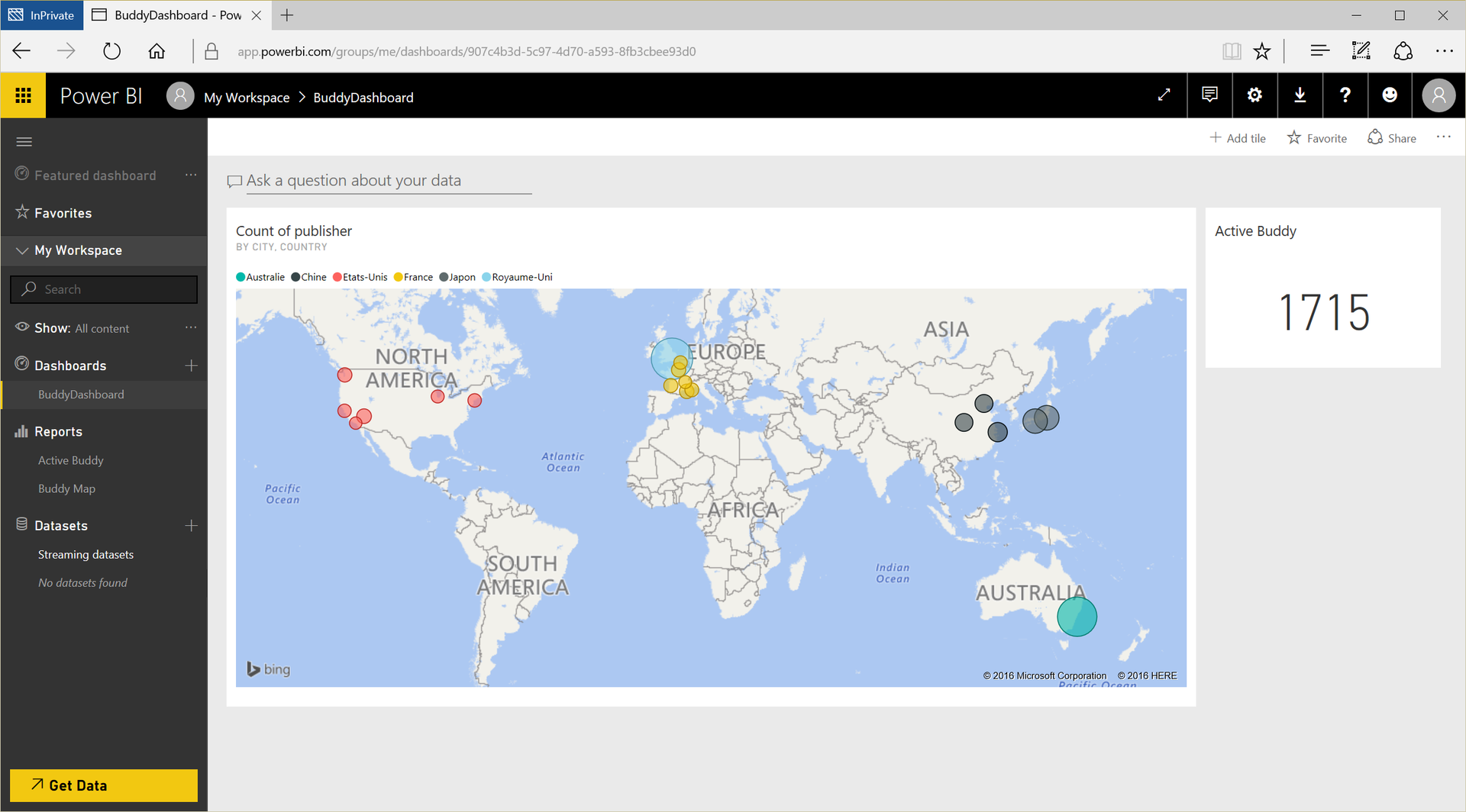
したがって、データはPower BIに表示されます。
インフラストラクチャコストの計算
ロボットのコストを計算するには、いくつかの重要な要素を強調表示する必要があります。
- 展開されたロボットの数:2200
- ロボットごとのアクティブなコンパニオンアプリの数:2
- 平均的な技術データと使用情報:100 KB
- コンテキストデータと特殊データの平均ボリューム:3 MB
- 技術データと使用情報のリクエストを送信する頻度:5分
- ロボットまたはデバイス上の1日あたりのコンテキストデータとプロファイルデータの同期:1
- SASトークンの有効期限:1時間
- Azure Functionsの平均期間:100ミリ秒
- Azure Functionsのメモリ消費量:512 MB
また、24時間のアクティビティを31日間考慮します。 これにより、最悪のシナリオに備えることができます。
総費用は122.1797ドルでした。
1か月あたり1バディの合計コスト= 122.1797 / 2200 = 0.05554米ドル。
各コスト項目の詳細な計算については、以下のネタバレをご覧ください。
コンテキストデータとプロファイルデータのBLOBストレージコスト= 14.8896ドルBLOBを保存するには、「ホットな」ローカル冗長ストレージが使用されます。
通常、データセットはさまざまなサイズと形式の5つのファイル(.json、.png、地図作成)で構成されます。 Azureストレージのコストは、ストレージとアクセスという2つの基準に従って計算されます。 この場合、ストレージコストは1か月あたりGBあたり0.024ドルです。 すべてのロボットのデータストレージの総コストを計算します。
合計ストレージコスト=展開されたロボットの数*コンテキストおよび特殊データの平均量* GBあたりのストレージコスト= 2200 * 0.003 * 0.024 = 0.1584米ドル。
アクセスのコストは操作の種類によって異なり、毎月、操作の正確な種類と数を確定するのは困難です。 したがって、計算には最大コストがかかります。
ロボットまたはデバイスごとの推定操作数:10
1か月あたりの合計操作数=展開されたロボットの数*(ロボットごとのアクティブなコンパニオンアプリケーションの数+ 1)*ロボット/デバイスごとの推定操作数* 31 = 2200 * 4 * 10 * 31 = 2,728,000操作。
合計アクセスコスト= 1か月あたりのトランザクションの総数/ 10000 * 0.054 = 14.7312ドル。
コンテキストデータとプロファイルデータのBLOBストレージコスト= 14.8896ドル。
イベントハブコスト= 22.55ドルイベントハブは、1秒間に数百万のイベントを受信するように設計されているため、接続されたデバイスやアプリケーションからの膨大な量のデータを処理および分析できます。
イベントハブのコストは、受信イベントの数と展開可能な帯域幅の単位に基づいて計算されます。 帯域幅を設定するために、ロボットから送信される着信イベントのMb /秒の数を計算します。
着信イベントのMb / s =技術データと使用データの平均量(Mb)*展開されたロボットの数/技術データと使用データのリクエストの送信頻度(秒)= 0.1 * 2200/300 = 0.7333 Mb / s 。
1ユニットのスループットインジケータの場合、制限は着信イベントに対して1 Mb / sに制限されます。 ここでは、着信要求の数が制限より27%少ないため、必要な帯域幅は1ユニットのみです。 次に、ロボットから送信された着信イベントの数を計算しましょう。
着信イベントの数= 1日あたりの分数/技術データおよび使用情報の要求の送信頻度*展開されたロボットの数*日= 1440/5 * 2200 * 31 = 19 641 600イベント。
インバウンドイベントのコスト=インバウンドイベントの数/ 1,000,000 * 0.028 = 0.55ドル。
帯域幅の標準単位は月額約22ドルで、イベントハブを使用する総費用は次のとおりです。
イベントハブコスト= 22 + 0.55 = 22.55ドル。
Azure Functionsのコスト= 1,1094ドルAzure Functionsを使用して、SASがコンテキストおよびプロファイルデータとイベントハブを使用してBLOBストレージにアクセスできるようにしました。
Azure Functionsのコストは、リードタイムと実行の合計数に基づいて計算されます。 SASトークンは1時間有効なので、ロボットまたはアプリケーションで各機能が1日24回呼び出されます。 BLOBにアクセスするための関数は、ロボットまたはアプリケーションによって呼び出されます。 イベントコンセントレーターにアクセスするための関数は、ロボットによってのみ呼び出されます。
累積実行数=((展開されたロボットの数+展開されたロボットの数*(ロボットごとのアクティブなコンパニオンアプリケーションの数)* 24 *日)+((展開されたロボットの数* 24 *日)=((2200 + 2200 * 2)* 24 * 31)+(2200 * 24 * 31)= 4 910 400 + 1 636 800 = 6 547 200
総実装コスト=(6,547,200-1,000,000)/ 1,000,000 * 0.20 = 1,1094ドル。
AzureポータルのAzure Functions監視ツールは、平均リードタイムの計算に役立ちました。 この場合、80ミリ秒です。 関数のメモリ容量は512 MBです。 この情報は、リードタイムのコストの計算に役立ちました。
リソース消費(秒)=実行*実行時間(秒)= 6 547 200 * 0.08 = 523.776秒
リソース消費(GB-s)= GBに変換されたリソース消費*ランタイム(秒単位)= 512/1 024 * 523 776 = 261 888 GB-s。
支払い可能なリソース消費=リソース消費-月額割引= 261,888-400,000 = 0 GB-s。
毎月リソースを消費するコストは0ドルです!
Azure Functionsのコスト=実装コストの合計+リソース消費の月間コスト= 1,1094ドル。
ストリーム分析コスト= 25.0281ドルStream Analyticsのコストは、処理されるデータの量と処理に必要なストリーミングモジュールの数に依存します。
ストリーミングによって処理されるデータの量=技術データと使用データの平均量(MB)*展開されたロボットの数*技術データと使用データのリクエストの送信頻度(日)*日= 0.1 * 2200 * 288 * 31 = 1 964 160 MB = 1964.16 GB。
処理されたデータの量のコスト= 1 964.16 * 0.001 = 1.9641米ドル。
このようなボリュームの場合、必要なストリーミングは1ユニットのみです。
ストリーミングユニットあたりのコスト= 0.031 * 24 * 31 = 23.064ドル。
Stream Analyticsのコスト=処理されたデータの量のコスト+ストリーミングユニットあたりのコスト= 25.0281米ドル。
技術データと使用データのBLOBストレージコスト= 54.7398ドルBlobストレージには、Stream Analyticsから受信したデータのみが含まれます。 ストレージ内のBLOBファイルの合計サイズは、Stream Analyticsによって処理されるデータの量と同じです。
ストレージコスト=ストリーミングによって処理されるデータの量* 1 GBのストレージのコスト= 1964.16 * 0.024 = 47.1398米ドル。
アクセスのコストを計算するには、アクセスを更新するために、イベントハブの着信イベントによって処理されるメッセージごとに1ユニットのアクセスを検討します。
アクセスコスト=着信イベントの数*トランザクションコスト(10,000あたり)= 19,641,600 / 10,000 * 0.004 = 7.60ドル。
技術データと使用情報のBLOBストレージコスト=ストレージコスト+アクセスコスト= 54.7398米ドル。
帯域幅コスト= 3.8628ドルこれは、コンテンツ配信ネットワークやExpressRouteのコストではなく、Azureデータセンターとの間でデータを移動するコストを指します。 モバイルアプリケーションによるデータの読み込みが考慮されます。 各アプリケーションは月に2回ファイル全体と同期されると考えています。
ダウンロードしたデータの量=コンテキストデータとプロファイルデータの平均量(GB)* 2 *ロボットごとのアクティブなコンパニオンアプリケーションの数*展開されたロボットの数= 0.003 * 3 * 2 * 2200 = 39.6 GB。
送信データ転送コスト=(ダウンロードしたデータの量-月額割引)* 1 GBの送信コスト=(39.6-5)* 0.087 = 2.5752米ドル。
Azureとロボットの間で、たとえばSASトークンを取得するために、少量のデータが何度も転送されます。 これらのコストをカバーするために、コストにさらに50%を追加することが決定されました。
帯域幅コスト=送信データコスト+ 50%= 2.5752 + 1.2876 = $ 3.8628。
おわりに
Blue Frog Roboticsはわずか3日で、完全に機能する内部システムをセットアップしました。 これで、会社は発売後すぐにロボットの展開と試運転を監視できるようになります。
デプロイされたアーキテクチャは、将来の開発に非常に柔軟であるため、技術者は新しい中間サービスを追加でき、多くの地域の開発環境とアーキテクチャ全体の自動化もサポートします。 最も興味深いのは、生産単位あたりの内部システムのコストが非常に少ないことです。
このようなアーキテクチャまたはそのコンポーネントのデプロイに興味がある場合は、 GitHubでソースコードを入手できます 。
3月30日に、ビジネス 、 IoT専用のオンライン会議が開催されることを思い出してください。