 あまり説得した後、私は30位がそれほど悪くないと確信しました、そして、記事を書く価値があります。 私は、 Stefというニックネームを持つメンバーであり、サンドボックスで約30か所を占めました。
あまり説得した後、私は30位がそれほど悪くないと確信しました、そして、記事を書く価値があります。 私は、 Stefというニックネームを持つメンバーであり、サンドボックスで約30か所を占めました。
並んで描かれた絵には深い意味があります-十分な時間を捧げてコンテストの受賞者になる代わりに、私は反対に行きました-必要のないことに時間の3分の1を費やしました。 より正確には、侵入できない壁はないが、切り刻むか、それらと一緒に歩くことができる木だけがある空間でパスを見つけるためのアルゴリズムを取り上げました。
それが何であるか、 ビデオで見ることができます、そして私は猫の下の森のすべての秘密を学びたい人々に尋ねます。
最初に、 競争自体についてのちょっとした話。 今年、コンテストのルールは、世界で人気のあるMOBAコンピューターのジャンルに基づいていました。 このジャンルの基本概念は保持されています-基地近くの3行にクリープが出現します。 ルーン川 両側に5人のヒーロー。
しかし、それにもかかわらず、本格的なMOBAではありませんでした-実際にベースを保護するために、ラインからラインに効率的に切り替えるだけでは不十分であり、開発は特定の限られたセットからのスキルをポンピングする形で行われました。 トップのファイナルは、「中心線で敵の基地をすぐに破壊する者が勝った」という原則に従ってゲームが開催され、4〜6のクリープの波から一気に破壊されたという事実に引き下げられました。
このジャンルを直接知っている人として、競技の最初に、私は何かがおかしいと疑い、決勝戦にはまさにそのような戦術が存在することを示唆しました。 残念なことに、バランスは良く変わっていないので、勝利につながるゲームではなく、自分のゲームをプレイすることにしました。
建築
今年、私はC ++で戦略を書きました。 私はそのような決定を後悔しました-私は、高レベル言語からの十分な機会を持っていませんでした、私はすでにそれらに慣れています。 最後までに、私のプログラムには141個の.hまたは.cppファイルが含まれていました。 このように見えた: 建築の森 。
この写真から、建築の主なアイデアを見ることができます。
- 汎用レイヤー-アルゴリズム、共通、環境などのフォルダーが含まれます。 これらのフォルダー間のクラスの位置は、特にAlgorithmsフォルダーとEnvironmentフォルダーの間では完全には正しくありません。
- コマンドレイヤーは、MoveCommand、AttackCommand、CastCommandの3つのプロトコルのいずれかを実装するクラスのセットです。 ロジックの責任者:どこへ行くか、誰を攻撃するか、何をキャストするか。
- 戦術レイヤー-戦略、戦術、役割フォルダーが含まれます。
- Strategyはチーム結果の加算器であり、チームとの作業を簡素化するための基本セットが含まれています。
- 役割-魔術師の行動を決定する基本クラス-単なる数字のセット。
- 戦術-戦略、およびこの戦略の役割について説明します。 各ラウンドでは、それらは異なります。 そして、ファイナルにはそれらのいくつかがあります。
アーキテクチャは非常に大きく、冗長であることが判明しました。特にコマンド層です。 これはいくつかのコスト超過につながりました。
時間
競技の開始前に、時間をカウントするためのプログラム(toggl)をインストールし、それを常に使用していました。 私はすぐに多くの興味深い質問に答えます-オリンピックに多くの時間と労力が費やされていますか? -はい、たくさん。 仕事や家族と組み合わせるのは非常に難しく、実際には睡眠を犠牲にしなければなりません。 学生はこの点でよりシンプルですが、私もそれは簡単ではないと思います。
週ごとの滞在時間:
- 最初-26時間
- 2回目-26時間
- 3回目-27時間
- 4-34.5時間
- 5番目-38.5時間
- 6回目(決勝前)-10時間
- 決勝戦後-15時間
合計:177時間。
2番目のラウンドでは
休憩と決勝戦の終了後、約17時間かけてバグの編集と戦略のマイナーな改善を行い、80〜90位から20〜30位に昇格させました。 この時点で、私はついに夜にオリンピックを書くのは悪い考えであることに気づきました-コードの改善のほとんどはタイプミスの修正で構成されていましたが、これは夜に大きな苦しみがあったためです
タスクに費やした時間:
- アーキテクチャサポート-28時間
- パス検索アルゴリズムの作成-49時間
- ダッジアルゴリズムの記述-26時間
- 残りは67時間です
リストには、最も時間がかかった3つの主要なタスクが含まれています:アーキテクチャ、パス検索、覆い焼き。 定数のバランス調整と調整、時間のかからないバグとアルゴリズムの修正などが「休息」になりました。
ここで最も興味深い部分に移ります-私が非常に多く書いたアルゴリズムであり、それらのすべてがその可能性を明らかにしたわけではありません。
アルゴリズム
オリンピック中に、次のアルゴリズムが実装されました。
- 影響マップ-ラインに沿ったパワーのバランスを簡単に評価し、現在ライン上にあるポイントを見つけることができます
- 影響マップをより正確に計算するには、まず、不可視ゾーンでの敵の存在を予測する必要があります
- ローカルバトルの結果の評価-攻撃するタイミングと防御するタイミングを理解するために必要
- 発射物回避は、最も重要なアルゴリズムの1つです。
- 最適な位置を見つけることは、2番目に重要なアルゴリズムです。 現在の目盛りを入れて回すのが良い場所を推定します。 私の戦略で最も弱いリンク
- パスを見つける-ポイントまでの距離を推定し、到達するためにどの木が干渉するかを見つけることができます
- 障害物の回避-最短経路に沿って接近する障害物を回避するために必要
影響マップ
それは最初のラウンドの後に作られました。 もともと最終的に戦術的な決定を下すために作成されました。 実際、その主な目的は、戦闘が現在行われている最前線を決定することです。
さらに、影響マップは、ローカルの戦闘の結果を評価し、どのラインが最適かを評価する際に重要です。 次のようになります。
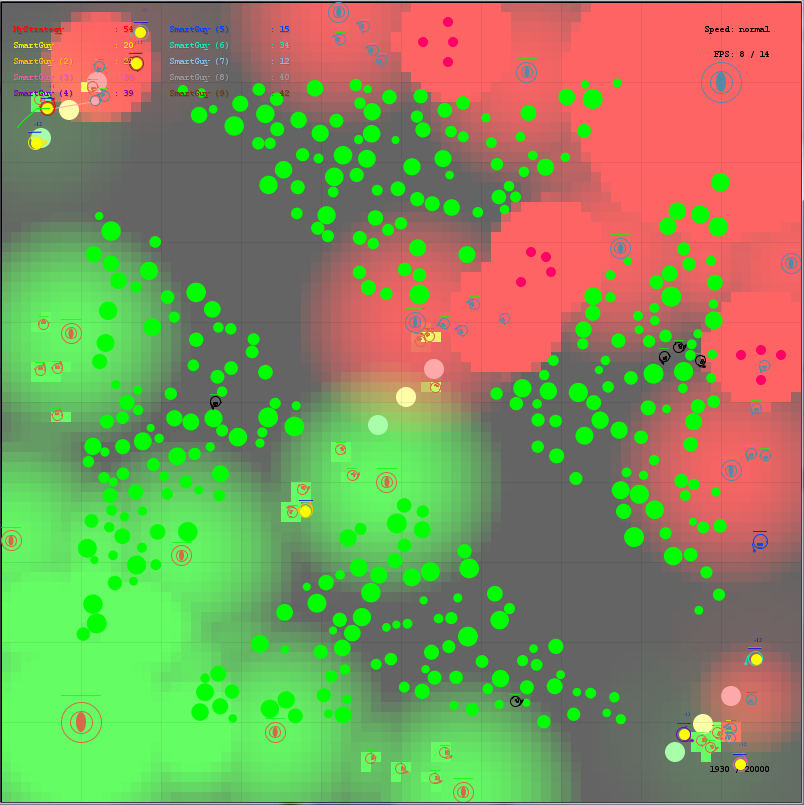
よく見ると、主な影響はクリープによってもたらされていることがわかります。 魔術師はその不確実性のために小さな影響力があり、塔は弱く、攻撃の場合に反撃することはできません。 原則として、タワーの弱さは、MOBAとゲームのバランスが異なる最大の理由の1つです。
非常に簡単に構築されました:
マップ上のすべてのユニット、建物、魔術師を通過し、周囲のグリッドを塗りつぶします。 合計で2つのグリッドがあります:味方と敵、両方のグリッドはサイズが80x80でマップ全体です。
最前線が現在どこにあるかを見つけるために、アルゴリズムはそのベースから敵に行き、現在のチェックポイントの周りの敵の影響をチェックします。 このポイントの周囲に敵の影響がある場合、このポイントの最前線は意味します。
実際、最初はアルゴリズムは別の原則に基づいて動作し、敵側の「黄色」ゾーンに最初に遭遇したポイントを与えました。 しかし、 core2duoというニックネームの参加者は、最前線がどこにあるべきかについて私の考えを変えました-最後の彼の戦略は、トップタワーを攻撃し、森を回り、行に行かず、それによって彼のマジシャンが注意を払わずに通り過ぎたクリープ。
力が線に沿ってどちら側に優れているかの推定値は、この線に対するすべての影響の合計を使用して取得されます。 そして、以下のアルゴリズムを使用すると、この推定値は、ラインがいつ負け始めたのか、またはその逆だったのかを判断するのに十分正確でした。 確かに、私の怠のため、影響の合計は間違っていると考えられており、ラインがどれだけ強いか弱いかを言うのはそれほど簡単ではありません。
不可視ゾーンでの敵の予測
3つの予測があります:敵のクリープの発見、魔術師、タワーの発見。 最初の予測は非常に正確ですが、直接使用されません。 これがなければ、アルゴリズムはほとんど常に私たちのラインが勝つと思っていたので、ラインの強さを評価することだけが必要です。
敵のクリープを予測するために、かなり単純なアルゴリズムが使用されます-750ティックごとに、クリープの出現時間に、4つのクリープが常に同じグループで同じ速度で、発生ポイントから常に起動されます。 視界があるゾーンに到達するとすぐに消えます。
物語はマジシャンとは異なります-彼らは影響のマップにほとんど影響を与えませんが、同時に画面の端を越えて逃げた敵のマジシャンに追いつくことができるのはいいことです。 そのため、可視領域に最初に出現したすべての敵のマジシャンはローカルワールドに保存され、可視領域から消えた場合、基地への出発をエミュレートします。 つまり、戦略は常に考慮します-マジシャンが見えなくなった場合、彼はベースに走ります。
また、タワーはメイジの表示半径と同じ距離で射撃するため、敵タワーの位置はゲームの開始時に対称的に駆動され、常に存在を把握します。 また、攻撃時間は自動的に計算されます。 ここで、メイジが死亡したかフリーズした場合、戦略はこのメイジを制御できないため、1ではなくdtを削除する必要があるという事実を考慮に入れる必要があります。
ローカルバトルの結果の推定
このアルゴリズムが登場する前、私の戦略は常に防衛から行われていました。魔術師が攻撃できる唯一のケースは、前線が敵の基地に強く移動する場合のみでした。 または敵の魔術師自身が殺されるようになりました。
このアルゴリズムの出現は、非トップ戦略の中で明らかに優位性をもたらしました-トップ戦略はほとんど間違いを犯さず、攻撃すると間違いなく勝つとはほとんど言えませんが、弱い戦略は遅かれ早かれ間違いを犯し、その瞬間に戦闘結果の予測者は言う-すべて攻撃できます。
彼は攻撃で主な利点を与えましたが、主にラインに不均衡がある場合、または別の方法で自分よりも敵の魔術師が多い場合にミスをしないために作成されました。 この場合、少なくとも1回間違えた場合、メイジが殺される可能性が高いため、敵から少し離れた方が良いでしょう。
ローカルバトルの結果を計算する方法は非常に簡単ですが、これにもかかわらず、非常に効果的です。
最初に入力パラメータを決定します-入り口に魔法使いと攻撃したいポイントがあります。 より高度なオプションもあります-あなたの魔術師+敵が入り口に供給されます。その場合、勝つ可能性を評価する機能は2回呼び出されます-自分用と敵魔術師用です。 このアプローチは、ポイントを経由するのではなく、勝つ可能性をより正確に評価するのに役立ちます。なぜなら、力が平等である場合、彼はゼロに近い数を与え、大きな違いの場合、それはこの違いをさらに強化するからです。
メインの計算関数は次のようになります。
- 現在のティックで、マジシャンhpよりも多くのダメージを与えることができる場合は、全員が同時に撃つと、負の勝利のチャンスを返します
- コントロールポイントまでの距離がほぼ同じか、私のメイジと近い友好的なメイジに危険を追加します。
- メイジとコントロールポイントの間にいる敵のメイジの危険を取り除きます。
- 与えられた半径の円、および魔術師の位置と制御点の間の中心に利点を追加します。
- 結果の値を正規化し、出来上がり-勝利の可能性があります。
同盟軍が敵軍よりも1.5レベル高い魔術師である場合、勝つ可能性は100%です。
したがって、レベルのないゲームでは、クリープが1つのメイジの強さの約20%であり、メイジのHPがしばしば等しい場合、攻撃の場合、勝つ可能性は50%を超える必要があるため、攻撃することはあまりありません。
マジシャンの危険性は、DPS、特定の魔法の存在、HPの量、バフとデバフの存在、魔法のクールダウン、マナの量の10個の値の合計として推定されます。 各係数は目で選択され、ゆっくり調整されました。 原則として、この時点でより正確なオッズを記述しても、戦略が大幅に改善されるとは限りません。
発射物回避

すべての中で最も効率的なアルゴリズムであり、同時に最も簡単なアルゴリズムです。
最初に、特定の方向の動きをエミュレートする関数が回避のために作成されました。 つまり、この戦略は、最大のティックを持つシェルの数を推定し、特定の方向でのメイジの動きをエミュレートします。 シェルがマジシャンに当たった場合、この方向は間違っているため、別の方向を見る必要があります。 発射物が全方向に命中した場合、回避することは不可能です。
最初に、戦略は3つの方向でカウントされ、異なる方向での前方および後方の動きを考慮する場合は6でカウントされました。 しかし、しばらくして、そのような逸脱は攻撃や退却の時間を与えないことに気付き、最初はどこに行くのが良いかを考え始め、次に移動方向に最適なものを見つけるために60方向の逸脱を追い出しました。
ここには弱点があります。回避するとき、私は常に一方向に動き回るという事実を考慮します。 理論的には、このアルゴリズムを改善することができ、動きの最良の偏差を見つけることはできませんが、角度の最小偏差を見つけることができます。 そのようなアプローチは、敵に撃つために現在のアルゴリズムよりも小さな角度でターンをする必要があるため、戦闘に勝つ可能性を高めます。 これにより、2〜3ティックを節約できます。これは、マジシャンが60ティックごとに発射でき、発射体がマジシャンに約12ティック飛ぶ場合に非常に重要です。
しかし、私は1つのニュアンスを説明しませんでした-回避するとき、それは周りの障害物を考慮する価値があります:木、クリープ、魔術師、建物。 これらの目的のために、移動の方向を検討する前に、この方向のすべての交差点が検索され、最も近いものが選択されます。 つまり、結果は移動するベクトルではなく、セグメントです。 オブジェクトの一部は各ティックが移動しますが、慣性を持たないため、覆い焼きの可能性をもう一度遮断しないように、各「ティック」のオブジェクトの半径はオブジェクトの速度によって減少します。 魔術師にとって、これは彼らの最大速度であり、クリープにとってそれは彼らの動きの方向に依存します。 したがって、クリープが私たちの方向に動いていた場合、逆にその半径は減少するのではなく、増加します。 モーションシミュレーションがないため、「ティック」を引用符で囲みました。この場所には、オブジェクトとの交差点までの距離に基づいてティックを計算する式があります。
最適な位置を検索する
アルゴリズムの利点を「アルゴリズムによって与えられる利点」/「コードの行数」と考えると、これは最も不必要なアルゴリズムです。 しかし、残念ながら、彼がいなければ、魔術師は動けません。 移動および防御フォルダーにあるすべてのコマンド+攻撃のカップルは、移動のカウントを担当します。 より正確には、各チームは、移動するベクトル、この方向の移動の優先順位、および回転のための同じペアを返します。 多くの場合、回転と動きは一致しますが、常にではありません。 チーム自体は、いくつかの基準に従ってこれらのベクトルを考慮する複雑な機能です。 合計で9つの移動コマンドがあります。
- 敵の魔道士を追いかける
- 走って格闘を攻撃する
- タワーからの距離を保つ
- クリープから距離を保つ
- シェルをかわす
- 敵の魔術師からの距離を保つ
- 実行して経験を積む
- ボーナスまで走る
- 最前線まで走る
それらのほとんどは繰り返すことができ、それらはさまざまな要因に依存する異なる優先度を持っています。 たとえば、近接戦闘で攻撃するには、勝利の可能性が高くなければなりません。 または、敵の魔道士が発射物をかわすことができるならば、我々はそれを最後に撃ちます。 すべての優先順位を説明するには別の記事が必要な場合がありますが、ほとんど意味がありません-それらはすべて目で選択されたものと同じでした。
そのようなベクトルをすべてカウントした後、戦略はそれらの中で最大の優先度で必須であると判断します。 そうでない場合は、すべてのベクトルの中から優先度が最も高いものを見つけて平均化します。 2種類のベクトルが必須と見なされます-発射体からの回避とタワーからの脱出。 平均化とは、最大値から45度を超えずに、それらの優先度を考慮に入れたベクトルの合計です。 これは、マジシャンの横にほとんど同一のベクトルが多数ある場合にどこに行くか、たとえば2つの敵のクリープが近くにある場合の精度を高めるために行われます。 同時に、必須ベクトルに対してこれを行うことはお勧めできません-それらは、従わない場合にダメージを受けることができるように計算されます。
道を探す
パス検索の最初のバージョンは非常にシンプルで、ラウンド1の前に作成されました。特定のポイント(約50)に対して、ポイントへの最短パスが配置された静的グラフが作成されました。 終点とマジシャンが配置されているポイントはパス自体にないため、これらのポイントからグラフの最も近い所定のエッジへの垂線が構築されました。
このアプローチで私が見た最大のマイナスは、最短の方法とはほど遠いものでした。ポイントに到達できる時間を推定するために、特定の近似係数を与える単純なヒューリスティックが書かれました-理論的に最短の方法は計算されたものとどのように異なりますか?
したがって、ラウンド2では、より複雑であるがパスのより正確な検索が記述されました。 パスの長さのより良い推定に加えて、彼はまた、木の伐採を考慮してパスを推定することを可能にしました。これは、場合によっては時間を節約します。 このアルゴリズムは、 リーとダイクストラの結合であり、その動作の原理は次のように説明できます。
マップ上の価格でサイズ125x125のグリッドを作成します。 誰もいない場合、価格は1です。マップの端では、価格は無限です。 その後、ツリーを通過する価格が価格に加算されます。価格はツリーの半径に依存します。ツリーの中心では最大になり、端まで減少します。 クリープとタワーについては、ほぼ無限の価格が設定されています。 また、敵側の影響マップは、ウェイの検索において価格への小さな影響も拒否します。これは、戦闘の中心に登るのではなく、それをバイパスするために必要です。
その後、リーアルゴリズムからの波と同様に、マジシャンの現在のポイントから波が発射されましたが、マップ全体で常にトリガーされ、セルへの遷移の重みが考慮されました。 遷移の重みのために、アルゴリズム自体はリーよりもダイクスタにより類似しています。
- ウェイトマップが作成されます-すべてのウェイトは無限であり、遷移ポイントのスタックが作成されます。
- 現在のポイントをゼロウェイトに設定し、それを遷移ポイントとして入力します
- ループ内で、移行ポイントがある限り:
- 最初の移行ポイントを取得します
- すべての隣接セル(4つの隣接セル)を調べ、これらのセルの予備の重み(現在のセルの重み+隣接セルの価格)をカウントします
- 結果の重みがセル内の現在の重みよりも小さい場合、重みを変更し、セルを遷移ポイントのスタックに追加します
- 次の反復に進む
このアルゴリズムを分析すると、遷移価格を考慮しないリーアルゴリズムのこのような実装には、O(N * M)の推定値があります。つまり、アルゴリズムは各セルを正確に1回回りました。 隣接セルがチェックされているときに、係数「* 4」を追加することもできます。 重みがあるため、アルゴリズムは各セルを数回訪問できますが、これは重要ではありません。 確かに、リーにはない制限が1つ追加されました。マップ全体をバイパスする必要があります。 しかし、私たちにとってこれは重要ではありません。このマップの後半では、ティックごとに平均で約5であり、極端な状況では最大10以上に達する可能性があるポイントへの道をすばやく見つけることができるからです。
ビルド時間をさらに短縮するために、このカードは30ティックごとに再カウントされます。 この時間の間に魔術師が自分のいるセルを変更した場合、彼は素早く体重を変更します。 重みの変更は、次のように簡単に説明できます。新しいセルでは重みをゼロにし、古いセルでは値を1よりわずかに小さく設定します。 最後の30ティックでセルを変更した回数に応じて、値は1よりわずかに小さくなります。 これは、将来、パスを検索するときに、アルゴリズムが常に重みなしの現在のポイントに到達できるようにするために必要です。
ウェイトマップ自体のパスの検索は難しくありません。ある時点から、常に隣接セルから最低価格を選択するようにパスを構築します。 確かに、4つの隣人ではなく8つの隣人が既に存在し、対角線上の隣人の場合、遷移価格はsqrt(2)によって過大評価されます。
伐採
パスが構築された後、どのツリーを削減する必要があるかについての情報を要求できます。 パスは、グリッド上に構築された短いセグメントのセットとして表されます。 これらのセグメントをセグメントと呼びます。 どのツリーが干渉するかに関する情報を取得するには、次のアルゴリズムが使用されます。
パスをたどり、現在のパスのセグメントに最も近く、同時にそこから遠くないツリーを見つけます。 このツリーは実際に私たちに合っていると確信しています-バイパスすることはできません。 これを行うには、プレイフィールドをパスの一方と他方の2つの部分に比fig的に分割します。 パスの反対側に属するツリーがあり、これら2つのツリー間を移動できない場合は、現在のツリーをカットする必要があります。
確かに問題があります-パスがツリーの真ん中近くを通過し、ツリーがパスの本来の位置の間違った半分になっている場所では、ツリーがログハウスとしてマークされていない場合があります。 ツリーが干渉しているようには見えないが、途中で間違っている場合、逆の状況も可能です。
私はこの問題に目をつぶらしました-それほど複雑ではない方法で解決することができますが、それは重大ではないことが判明しました。
障害物回避
作成された最初のアルゴリズムであり、最も変更不可能です。 実際、上記のパス検索アルゴリズムは必須ではなく、障害回避アルゴリズムがすでに存在し、機能しているという計算から書かれています。
ビデオで障害物回避だけを使用して魔術師が歩く方法を見ることができます。 ビデオは、デバッグモードで撮影されたため、わずかに禁止されています。
アルゴリズム自体は、オブジェクト間の内部接線の計算に基づいています。 世界のすべてのオブジェクトは円で表されているため、これは可能です。
ビデオを見ているときに最初に目を引くのは、絶えず紫色の線がぴくぴく動くことです。 線自体はアルゴリズムで使用されませんでしたが、そのようなマッピングは、オブジェクトのグループがどこにあるかを理解するために最も効果的であることが判明しました。 オブジェクトのグループが何であるかを理解するために、40秒間ビデオを見ることができます。そこで魔法使いは森に入り、2つのグループの間を通過します。 定義を与えるために、オブジェクトのグループは、マップ上のオブジェクトのセット全体の交差しないサブセットです。そのため、メイジは異なるサブセットの任意の2つのオブジェクト間を通過できます。または、2つのオブジェクト間の距離は、メイジの直径+最初のオブジェクトの半径+ 2番目のオブジェクトの半径よりも大きくなります。
アルゴリズムの最初の部分は、これらのグループを構築することです。 これは次のように行われます。
まず、多くのオブジェクトと空のグループセットがあります。 多くのオブジェクトからオブジェクトを取得してチェックします。1つのグループに分類される場合、つまり、グループのオブジェクトの1つに近い場合は、そこに追加します。 それが複数のグループに分類される場合、そのようなグループをすべて結合し、新しいオブジェクトを新しい大きなグループに追加します。
次は、現在の目盛りのどこに行くかの定義です。 これは、多くのグループ、魔術師の位置、私たちが来たいポイントに基づいて行われます。 私はこのアルゴリズムをいわゆるレイスローと呼びますが、実際にはこれらはレイではなく、最大長を持っているためセグメントです。
- まず、来たい場所にビームを投げます。
- グループとの交点、グループに最も近いオブジェクトを見つけます。
- 選択したグループのすべてのオブジェクトを調べ、それぞれに対して両方の内部接線を考慮します。
- 現在の光線からの最大偏差角を与える接線を見つけます-2つ(1つは左に、もう1つは右に)あります。
- 次に、マジックロジック(以下を参照)に従って、2つのいずれかを選択します。
- タッチポイントは、マジシャンの半径を考慮して、移動する必要がある新しいポイントになります。
- その後、再び交差しているグループを以前に削除して、レイをキャストしますが、新しいポイントに移動します。
「マジックロジック」が存在する理由を理解するために、写真を見てみましょう。
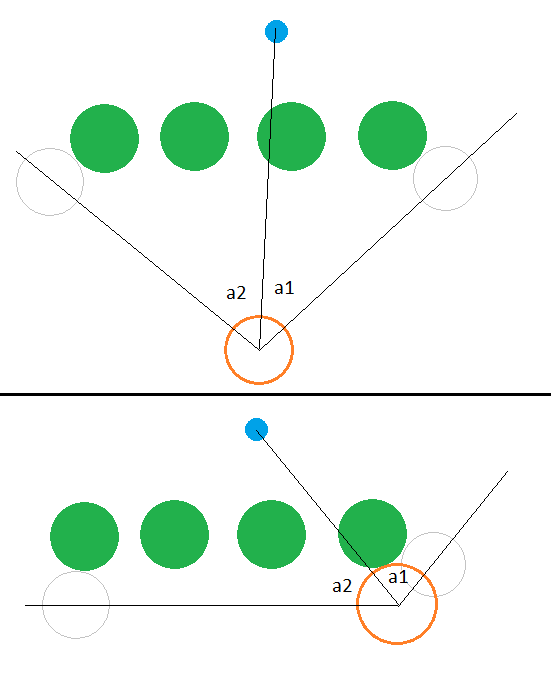
最初は、角度a1は角度a2よりも小さく、より短い経路があるはずなので、角度a1に向かう方が論理的ですが、接触点に近づくにつれて角度a1は増加し始め、角度a2は逆に減少します。 このため、すべての魔法のロジックは、角度だけでなく距離も考慮されていました。 パスの検索が表示された後、ビーム自体はすでに理想に近かったため、この問題は解消されました。
結論として
私のソリューションとCommandosソリューション(決勝で2位だが、実際は1位であることがわかっています)と比較すると、そのソリューションはより簡潔でシンプルですが、戦術的な評価はできませんが、ローカルバトルではほぼ完璧なソリューションを提供します。 私のすべてのアルゴリズムは、戦術的な決定の採用と、ローカルバトルよりもマップ全体のゲームに関連しています。 同時に、これらの非常にローカルな戦いは私にとって非常に困難で面倒でした。
このため、私は自分の決定を説明することにしました-トッププレイヤーの決定と比較して私の方向は異なります。
来年オリンピアードを書きたい人、そして年々明らかに人の数が増えている人には、夜寝るのをお勧めします...コードに2時間を費やす方が良いですが、夜に書いて1週間コードのバグを探すよりも良いでしょう。自分にとっては、「落ち着いた」状態のコードを見たとき、まさにそのような結論に達しました。実際、コード自体はgithub.com/ivlevAstef/CodeCupAI2016MOBAで見ることができます。ロシア語には、コードの整理に役立つ多くのコメントがあります。確かに、アーキテクチャの理解には時間がかかります。
これらのアルゴリズムまたはそれらのアルゴリズムが配置されているメインファイル
- 2D数学-共通/ C_Math
- パスファインダー-アルゴリズム/ A_PathFinder
- 障害物回避-アルゴリズム/ A_Move
- — Environment/E_World
- – Algorithms/A_Attack
- – Environment/E_InfluenceMap
- – Command Strategy/S_CommandStrategy
- – Algorithms/A_WinPredictor
また、この記事の執筆に多大な協力をしてくれたfirano(Leonid Lobanov)というニックネームを持つ参加者に注目したいと思います。
そして、チャットを電報で整理してくれたRoman Udovichenko(Romka)と、このチャットのすべてのアクティブな参加者に感謝します。あなたがいなければ、生産性は向上しますが、オリンピックを書くのはずっと退屈です。