ITMO大学の従業員と学生が取り組んでいるプロジェクトの1つでは、ブロックチェーンを使用し、別の分野(UAVコントロール)でテクノロジーを適用しています。 これについては、資料で詳しく説明します。

クリストファー・ミシェル/ Flickr / CC
「ドローン従業員」はどのように
このプロジェクトは、Ethereumプラットフォームの使用に基づいています。 他の電子マネーシステムとの主な違い-ここでの内部通貨(「エーテル」)はコインと同等ではありませんが、「スマートコントラクト」の下で相互に連携するネットワークノードに給電します。
たとえば、1つのノードが特定のアドレスに「エーテル」を送信し、この情報がブロックチェーンに入力されます。 これに応じて、別のノードがコードの実行を開始します。 したがって、ロボット自体が命令の正しい実行を監視するネットワークを作成することができます。
(ベースの座標を指定する必要がある)雇用契約を作成し、トランザクションをイーサリアムネットワークに転送した後、ドローンは座標を受け取り、フライトの距離とコストを計算します。 その後、ユーザーは支払いを行い、ロボットはタスクを完了するために進みます。 開発者は、このようなプラットフォームが、モノのインターネット市場参加者の相互作用システムの基礎を形成できると確信しています。
このプロジェクトの最終的な目標は、ドローンの大量サービスを作成することです。ドローンは、指示を交換することで独立して分散管理されます。 このニーズは、エンドユーザー、保険会社、インターネットプロバイダー、自律ドローンデータベース、地形データを提供する会社など、さまざまな参加者が UAVの使用に関与しているという事実によるものです。 また、分散管理により、高度なセキュリティが提供されます。
最初のテストは2015年に実施されました。 そして今年4月、ITMO大学アレクサンダーカピトノフの制御システムおよびコンピューターサイエンス部門のアシスタントであるセルゲイロンシャコフ氏のプロジェクトチーム、ITMO大学の卒業生アレクサンダークルペンキン、ITMO大学の学生であるSemyon Pavlovが、ルートを個別に修正する能力についてシステムをテストしました。 合計で、4つのドローンが関与し、その経路は特別に交差していました。 実験は成功しました:
プロジェクトの主任開発者であるセルゲイロンシャコフは、今年8月にドローンエキスポショーでプロジェクトを一般に公開しました。 そして10月28日に、プロジェクトはSkolkovoテクノロジーパークで開催されたV年次フォーラム「オープンイノベーション」のインタラクティブセッションに含まれました。 セルゲイは、この技術の使用に対する関心が高まっていることに注目しました。これは、「ドローン従業員」のデモに出席した人々の数で顕著でした。
別の開発者は、ForkLogインターネットポータルとのインタビューでプロジェクトの見通しを称賛しました。「このプロジェクトのビジネスモデルは2016年から2018年にかけて非常に実行可能です。 このプロジェクトは、2つの非常にハイテクで若いパーティーを組み合わせているという事実を考えると、スマートコントラクトを使用する暗号通貨技術と、ドンと通信するためのROSフレームワークの使用です。

/写真itmo.news
チームメンバーの活動はこれに限定されず、他の技術を使用した経験があります。 たとえば、アレクサンダー・カピトノフは、主席率いる研究者グループで働いていました。 アレクセイ・ボブツォフITMO大学管理システムおよび情報学科では、適応管理の基礎を学生に教える際の LEGO MINDSTORMS NXTの実装について説明しています。 このプロジェクトは教育的であり、学生を仕事に従事させる方法の研究を含み、適応管理の理論的側面の開発のための生産的な雰囲気を作り出すことを目的としています。
さらに、別のグループの一部として、アレキサンダーは運動学モデルを使用した移動ロボットの制御システムを開発しました。 チームは、機動性のためにローラーベアリングを備えたロボットの研究に焦点を当て、実際に開発されたシステムをテストしました。
なぜプロジェクトは「前倒し」なのか
ITMO大学に基づいて作成されたプロジェクトは、 National Technology Initiativeの概念に完全に適合しています。 NTIは、技術市場で予想されるグローバルな変化を考慮して開発され、十分な数の高度な資格と関心のある人材の形成、トレーニングと成長のためのプラットフォームの作成、および新しい技術の開発に適したロシアの環境の開発を目的としています。
このコンセプトによれば、技術分野の新しい大規模なグローバル市場は10〜20年以内に出現します。 また、NTIの段階的導入のおかげで、ロシアはこれらの市場で適切に代表されることができます。
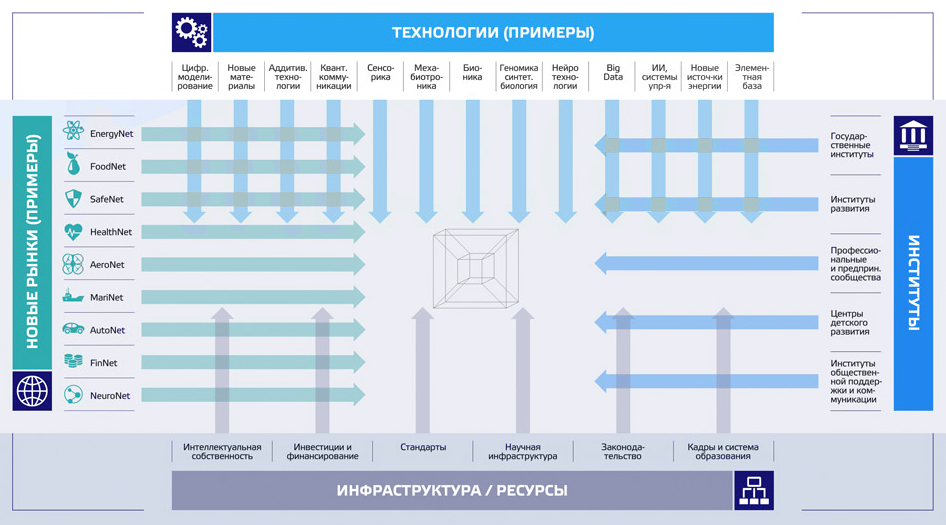
専門家は開発の優先分野(将来の技術市場 )を特定しました。そのうちの1つであるAeronet(AeroNet)は、無人航空機システムの市場セグメントの開発に関係しています。 戦略的イニシアチブ(STI規制当局)はロードマップを作成し、2020年までに「有人航空および複数のUASの自動自己組織化システムを作成するための技術とともに、共通空域の飛行制御システムの技術を開発する」ことを計画しています(1.7項を参照)ロードマップの実装計画」をご覧ください )。
/イメージASI
「Drone-employee」プロジェクトの枠組みの中で、人間の参加なしに複数のドローンの同時飛行を組織する可能性がすでに実現されています(STIが2020年に「計画」したもの)。 もちろん、これはコンセプトのごく一部にすぎず、この点に加えて、たとえば軌道や輸送手段としてのドローンの使用も含まれます。 しかし、プロジェクトの成功は、NTIが紙の上に存在するだけでなく、研究者や開発者に風土を作り出すことができることを示しています。
ITI大学でのスピーチでNTIプロジェクトの共著者であるDmitry Peskovは、彼の意見では、技術分野の主な傾向の1つは「ブロックチェーン」、つまり、すべての分野の仲介者の拒否であり、技術開発のペースが速い。 ( 出典の 「技術的特異点と「古いファージ」の段落を参照)。 これは、おそらく、Drone-employeeプロジェクトへの関心の高まりを説明しています-その作成者はトレンドに乗り、すでに人気のあるいくつかのシステムの接合部で技術を開発することができました。
ITMO大学の他の誰がこれらの領域を調査していますか
ITMO大学では、セルゲイロンシャコフのチームだけがUAVを開発していません。 たとえば、大学はさまざまな構成のドローンを構築するためのモジュール式プラットフォームを開発しました。 デバイスの必要な特性に応じて、モジュールのさまざまなレイアウトオプションを選択できます。さらに、ハードウェアシステムは、国内のコンポーネントを操作することを目的としています。 システムには、Linuxを実行するオンボードコンピューターも含まれます。
ITMO大学のチーム全体(Alexey Margun、Konstantin Zimenko、Dmitry Bazylevなどが代表)は、フィードバック線形化法に基づいたUAV制御アルゴリズムを開発しました(この研究の詳細については、 こちらをご覧ください )。 この論文では、2つのクワッドコプター制御方法をロボットマニピュレーターと比較しています。 結果として、構築されたモデルに基づいて、科学者は、彼らが提案した新しい制御方法により、ドローンが従来のアプローチ(比例微分コントローラーに基づく)よりも明確かつ効率的に所定の軌道をたどることができるという結論に達しました。
ITMO大学では、ブロックチェーン技術自体に多くの注意が払われています。 たとえば、ロシア系カナダ人プログラマーのヴィタリク・ブテリンによって開発され、約1年前に(公式に)ローンチされたEthereumプラットフォームに基づくブロックチェーンの作業(ドローン従業員プロジェクトはそれに基づいています)、今年の修士課程の学生から数理物理学および情報理論。」
この分野の研究のもう1つの例は、スマートシティプロジェクトです。ITMO大学の従業員は、ヨーロッパのbIOTopeプロジェクトと協力しています。 制御システムおよび情報学科の学生設計局(RED)は、モバイルロボットシステムをイーサリアムネットワークに統合しています。 (この局の活動については、すでにこちらで説明しています )。