
1つのデバイスを複数のチャネルに接続し、1つのチャネルを複数のデバイスに接続できますが、すべての通信チャネルは1つの通信モジュールで処理できます。
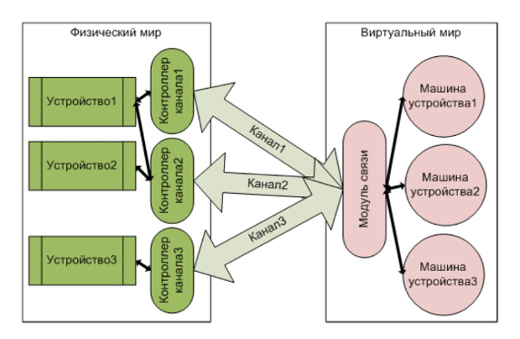
ACSモデルのデバイス
ステートマシンによってモデル化された一連の離散状態によって動作を説明できるデバイスをデバイスと呼びます。 各デバイスの一連の状態の定義は、シミュレートされたシステムの設計者によって実行されます。
リーダーステートマシン
実装されたACSでは、2つのリーダーが使用されました。 1つは回転式改札口に、もう1つはカードリーダーに取り付けられています。 リーダーをこのように配置すると、1回限りのパスを持つ訪問者は、カードリーダーからカードが返された場合にのみアクセスゾーンを離れることができます。カードリーダーはラベルのステータスを生成し、出口は許可され、ターンスタイルのリーダーは禁止されます。 両方のリーダーは2つのチャネルで処理され、リーダーの名前に関する情報は1つのチャネルで受信され、カードの名前に関する情報は2番目のチャネルで受信されます。
したがって、リーダーには次の個別の状態があります。
- リーダーは信号を受信する準備ができています。
- 受信した読者名
- 受け取ったカード名;
- 受信したリーダーとカードの名前。

別個の状態を使用する:リーダーがシステムの一部であるという事実により、リーダーとカードの名前を初期状態と組み合わせる代わりに受け取ります。 この場合、初期状態への復帰は、ターンスタイルからの信号によって実行されます。
これらの状態への遷移は、信号の1つが受信されたときに実行されます:リーダーの名前が決定され、カードの名前が決定され、遷移が行われるか、タイマーが作動した(ターンスタイルマシンからの信号)、エラーが受信されました。 これらの信号を例として次のように示します。リーダーの名前はnr、カードの名前はnc、ターンスタイルからの信号はts、エラーはerです。 一般的なケースでは、先に何が決定されるのかわからないので-リーダーまたはカードの名前、信号と対応する遷移を持つ状態マシンは次のようになります。
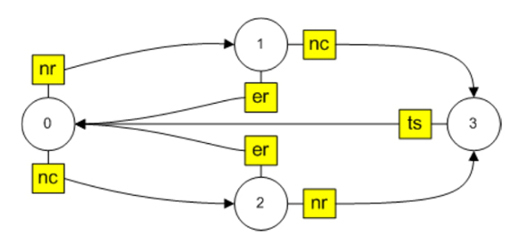
マシンは非常に簡単に実装されます。新しい状態は現在の状態と信号によって一意に決定されるため、テキスト値state_signalは遷移を定義するキーとして使用されます。 初期状態と新しい状態がわかれば 、テキスト値current_state#new_stateによって設定される遷移を簡単に決定できます 。次に、リーダーマシンでは、キーと新しい状態の間の次の対応と遷移を取得します。
| 状態 | 信号 | 信号解読 | キー | 状態 | 移行 |
| 0 | nr | 読者名 | 0_nr | 1 | 0#1 |
| 0 | nc | カード名 | 0_nc | 2 | 0#2 |
| 1 | nc | カード名 | 1_nc | 3 | 1#3 |
| 1 | えー | エラー | 1_er | 0 | 1#0 |
| 2 | nr | 読者名 | 2_nr | 3 | 2#3 |
| 2 | えー | エラー | 2_er | 0 | 2#0 |
| 3 | ts | ターンスタイル信号 | 3_ts | 0 | 3#0 |
つまり、リーダーステートマシンの信号と遷移は、ベクトルgenによって完全に記述されます。
gen=[[0_nr, 0_nc, 1_nc, 1_er, 2_nr, 2_er, 3_ts], [1, 2, 3, 0, 3, 0, 0]]
ステートマシンのアルゴリズムは完全に明白です(プログラムの起動時に初期状態が設定されます)。

状態が変化したときに発生するすべてのアクションは、適切なスクリプトによる遷移でのみ実行されます。 リーダーマシンの場合、これらのアクションは表に示されています。
| 移行 | アクション |
| 0#1 | システムでリーダー名を定義する |
| 0#2 | システムでのカード名の定義 |
| 1#3、2#3 | ターンスタイルマシンコール(eo、xo信号) |
| 1#0、2#0、3#0 | アクションなし |
指定されたマシンは、リーダーがビジターカードの識別モードで働いて回転式改札口を通過する場合に使用されます。 実装されたACSでは、カードリーダーは新しいビジター(新しいカード)の登録モードでも動作できます。 この場合、マシンとターンスタイルとの相互作用はなく、マシンは状態3を終了できないため動作しません。リーダー番号とカード番号を決定した後、マシンが初期状態に戻るには、次のものに置き換える必要があります。
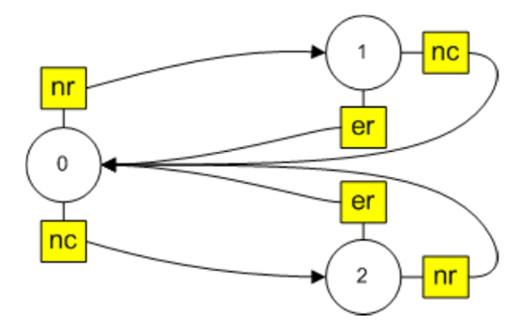
しかし、状態1と2から2つの異なる遷移(これらの遷移で異なるアクションが実行される)を介して進むことができるという事実はどうでしょうか? トランジション名を付けます(図では菱形で示されています)
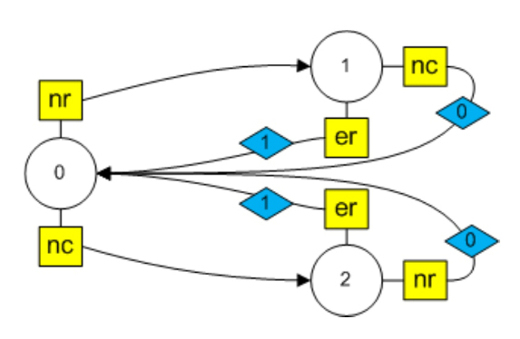
たとえば、状態1と0の間には、信号ncと信号erに2つの遷移があります。 単一の遷移の場合、名前は1#0でした。いくつかの遷移の場合、名前current_state# transition_name #new_stateを使用します 。
| 状態 | 信号 | 信号解読 | キー | 状態 | 移行 |
| 0 | nr | 読者名 | 0_nr | 1 | 0#1 |
| 0 | nr | カード名 | 0_nc | 2 | 0#2 |
| 1 | nc | カード名 | 1_nc | 0 | 1#0#0 |
| 1 | えー | エラー | 1_er | 0 | 1#1#0 |
| 2 | nr | 読者名 | 2_nr | 0 | 2#0#0 |
| 2 | えー | エラー | 2_er | 0 | 2#1#0 |
上記のアルゴリズムを使用できるようにするために、gen [1]で状態名を生成するためのルールを変更します: transition_name#new_name_name 。 次に、マシンの動作を決定するgenベクトルは次のようになります。
gen=[[0_nr, 0_nc, 1_nc, 1_er, 2_nr, 2_er], [1, 2, 0#0, 1#0, 0#0, 1#0]]
アルゴリズムへの最小限の変更は、新しい状態の定義に関連付けられます。 nState = gen [1] [keyInd]には新しい状態の名前は含まれませんが、遷移の名前との組み合わせが含まれますが、それを見つける方法は非常に明白です。
移行時に登録モードのマシンは他のアクションを実行し、ターンスタイルと通信しません
| 移行 | アクション |
| 0#1 | システムでリーダー名を定義する |
| 0#2 | システムでのカード名の定義 |
| 1#0#0、2#0#0 | 新しいデータを記録する |
| 1#1#0、2#1#0 | エラーメッセージ |
ターンスタイルステートマシン
回転式改札口は、2つのロックと遷移を修正するデバイス(通常はリードスイッチ)がある「複雑な」デバイスです。 また、ロックの状態と可能性のある音源を示す警告灯もあります。 1つを入口、もう1つを出口と呼びます。 各ロックは2つの状態(オープン/クローズ)のいずれかになりますので、回転式改札口は次の状態になります。

回転式改札口は、リーダーのコマンド、制御デバイス(この場合はタブレットのタッチスクリーン)のコマンド、およびリードスイッチの信号によって制御されます。 さらに、切り替えに失敗した場合にシステムが「フリーズ」するのを防ぐため(リーダーが作動し、ロックが開き、訪問者が通過しなかった)、タイマーがシステムに追加されました。これは、回転式改札機の移行にも影響します。
これらの状態は、信号の1つが受信されると転送されます:入力を開く、出力を開く(リーダーから)、入力/出力を閉じる(リードスイッチから-回転式)、入力/出力を開く/閉じる(タッチスクリーンから)、入力/出力を閉じる(タイマーから) ):
| 状態 | 信号 | 信号解読 | キー | 状態 | 移行 |
| 0 | eo | 入力を開く(リーダー) | 0_eo | 1 | 0#0#1 |
| 0 | XO | オープン出力(リーダー) | 0_xo | 2 | 0#0#2 |
| 0 | ep | オープンエントランス(タッチスクリーン) | 0_ep | 1 | 0#1#1 |
| 0 | XP | 出力を開く(タッチスクリーン) | 0_xp | 2 | 0#1#2 |
| 1 | gt | 入り口近く(リードスイッチ) | 1_gt | 0 | 1#0#0 |
| 1 | tt | 入力を閉じる(タイマー) | 1_tt | 0 | 1#1#0 |
| 2 | gt | 出口を閉じる(リードスイッチ) | 2_gt | 0 | 2#0#0 |
| 2 | tt | 出力を閉じる(タイマー) | 2_tt | 0 | 2#1#0 |
表に示す信号と遷移を備えたターンスタイルステートマシンは次のようになります。
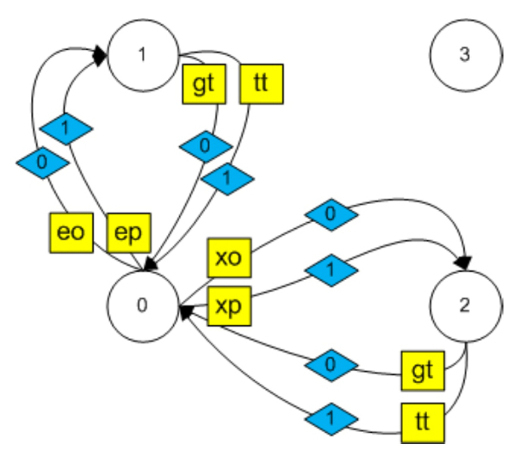
ターンスタイルマシンは、移行時に次のアクションを実行します。
| 移行 | アクション |
| 0#0#1、0#1#1 | 入力を開く、タイマーをオンにする、インターフェイスマシンを呼び出す(EO信号) |
| 0#0#2、0#1#2 | 出力を開く、タイマーをオンにする、インターフェイスマシンを呼び出す(EO信号) |
| 1#0#0 | 入力を閉じ、通信中のデータを記録し、リーダーマシンを呼び出す(シグナルts)、マシンインターフェースを呼び出す(シグナルts) |
| 1#1#0 | 入力を閉じ、リーダーマシンを呼び出す(シグナルts)、マシンインターフェースを呼び出す(シグナルts) |
| 2#0#0 | 出力のクローズ、通信中のデータの記録、リーダーマシンの呼び出し(シグナルts)、マシンインターフェースの呼び出し(シグナルts) |
| 2#1#0 | 出力を閉じ、リーダーマシンを呼び出す(シグナルts)、マシンインターフェースを呼び出す(シグナルts) |
回転式改札機は、回転式改札機に永続的または一時的なステータスのカードを登録するときに、あらゆる方向への一方向アクセスを可能にし、訪問者は、カードリーダーに登録することによって、一度だけステータスのカードで退出できます タブレットからターンスタイルを制御することもできます(矢印1をクリックすると入力が開き、2-出力が開きます。クローズはリードスイッチとタイマー信号に従って行われます)。
同時に、カードの有無に関係なく、ボタンでエントリを開いたり閉じたりする必要がある場合があります。 このために、「交通信号灯」が左側(入口)と右側(出口)で使用されます。 入口または出口のカードは、対応する信号機で黄色のライトが「点灯」する場合にのみ機能します。 赤い信号は対応するロックを閉じ、どのカードでも開くことができません。逆に、緑の信号は開き、リードスイッチもタイマーも閉じることができません。
そして今、問題が発生します:緑の信号ボタンをクリックすると、入力を開きます。 回転式改札機で状態1への移行を行い、リードスイッチgtまたはタイマーttの信号から状態0への移行を防ぐ方法 「マシン」アプローチでは、フラグなどの使用を検討するのではなく、genベクトルで指定されたマシンを使用したいのは明らかです。
genベクトルのキーコンセプトを拡張しましょう。 キーを生成するための行に値を追加します。これを条件と呼びます。つまり、キーはsignal_status + conditionです。 信号機で点灯している信号と、状態1のリードスイッチgtおよびタイマーttからの信号のキーに応じて、条件の次の値を定義します。
| 信号機 | 信号機の色 | 状態 | キー |
| 両方の信号 | 黄色 | 1_gt、1_tt | |
| 入場のみ | 黄色ではありません(赤または緑) | ls | 1_gtIs、1_ttIs |
| 出口のみ | 黄色ではありません(赤または緑) | rs | 1_gtrs、1_ttrs |
| 両方の信号 | 黄色ではありません(赤または緑) | bs | 1_gtbs、1_ttbs |
これで質問に対する答えがわかりました。 左側の信号機の緑色のボタンで入力を開いた後、リードスイッチからの信号はキー1_gtIsを作成し、タイマーからの信号は1_ttIsを作成します。これはgenベクトルにないため、遷移は発生しません。 回転式改札口は状態1のままです。
信号機のボタンを押すことに関連する回転式改札機の追加の移行を検討してください。 入力信号機からの信号はlr-赤、ly-黄色、lg-緑、出力信号機からの信号-rr-赤、ry-黄色、rg-緑です。
| 状態 | 信号 | 信号解読 | キー | 状態 | 移行 |
| 0 | lg | 緑色の信号ボタンで入り口を開きます | 0_lg、0_lgls、0_lgrs、0_lgbs | 1 | 0#2#1 |
| 1 | lr、ly | 赤または黄色の信号ボタンで入り口を閉じます | 1_lrls、1_lrbs、1_lyls、1_lybs
| 0 | 1#2#0 |
| 0 | rg | 緑色の信号ボタンで出口を開きます | 0_rg、0_rgls、0_rgrs、0_rgbs | 2 | 0#2#2 |
| 2 | ry、rr | 赤または黄色の信号ボタンで出口を閉じる | 2_ryrs、2_rrrs、2_ryrs、2_rrbs | 0 | 2#2#0 |
| 1 | rg | 緑の信号ボタンで出力を開きます(入力が開いている場合) | 1_rgls、1_rgbs | 3 | 1#2#3 |
| 2 | lg | 緑色の信号ボタンで入り口を開きます(出力が開いている場合) | 2_lgrs、2_lgbs | 3 | 2#2#3 |
| 3 | lr、ly | 赤または黄色の信号ボタンで入り口を閉じます | 3_lybs、3_lrbs | 1 | 3#2#1 |
| 3 | ry、rr | 赤または黄色の信号ボタンで出口を閉じる | 3_rybs、3_rrbs | 2 | 3#2#2 |
ステートマシンの対応する遷移:
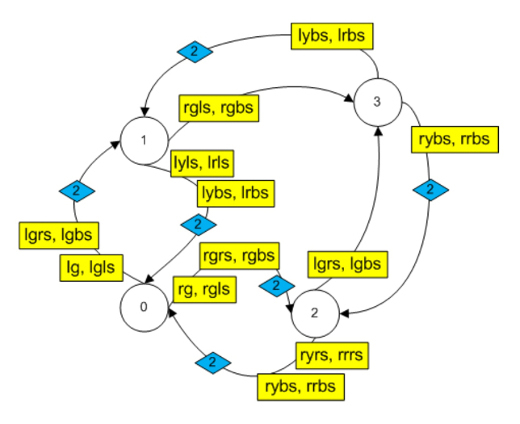
ターンスタイルステートマシンの完全な生成ベクトル:
gen=[[0_eo, 0_xo, 0_ep, 0_xp, 1_gt, 1_tt, 2_gt, 2_tt, 0_lg, 0_lgls, 0_lgrs, 0_lgbs, 1_lrls, 1_lrbs, 1_lyls, 1_lybs, 0_rg, 0_rgls, 0_rgrs, 0_rgbs, 2_ryrs, 2_rrrs, 2_ryrs, 2_rrbs, 1_rgls, 1_rgbs, 2_lgrs, 2_lgbs, 3_lybs, 3_lrbs, 3_rybs, 3_rrbs, 1_xols, 1_xpls, 3_gtls, 3_ttls, 2_eors, 2_eprs, 3_gtrs, 3_ttrs], [0#1, 0#2, 1#1, 1#2, 0#0,1#0, 0#0, 1#0, 2#1, 2#1, 2#1, 2#1, 2#0, 2#0, 2#0, 2#0, 2#2, 2#2, 2#2, 2#2, 2#0, 2#0, 2#0, 2#0, 2#3, 2#3, 2#3, 2#3, 2#1, 2#1, 2#2, 2#2, 0#3, 1#3, 0#1, 1#1, 0#3, 1#3, 0#2, 1#2]].
追加の遷移に対するアクションは、シグナル復号化から明らかです。
インターフェイスステートマシン
回転式改札口はタブレットから制御でき、その逆も同様です。インターフェースの状態はリーダーと回転式改札口からの信号に依存します。
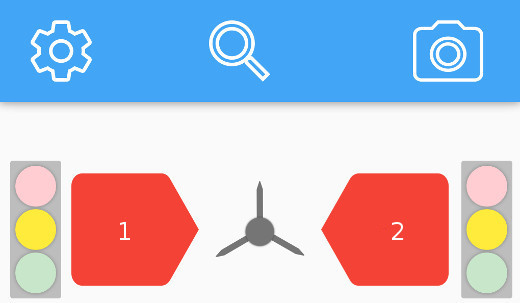
インターフェースの初期状態(上記の図)からわかるように、矢印の形の2つのボタンと各信号機の3つのボタンが制御に使用されます。 矢印は、黄色のライトが対応する信号機にある場合にのみ機能します。 信号が赤または緑の場合、矢印は機能しません。 つまり、信号機の状態はオンとオフになります。 また、2つの矢印の状態は同じです。
その結果、次の可能なインターフェイス状態を取得します。
- すべてがオフです。 ボタンのクリックを待っています。
- 入力矢印がオンです。
- 矢印がオンです。
- 信号入力がオン。
- 信号機出力オン;
- 両方の信号機が点灯しています。
- 信号入力がオンの場合、矢印出力がオンになります。
- 信号入力がオンの場合、矢印入力はオンになります。

前と同様に、すべての信号とテーブルへの遷移を収集します(図の左半分のみに関連する信号を示し、genベクトルを完全に提示します)。
| 状態 | 信号 | 信号解読 | キー | 状態 | 移行 |
| 0 | AE | エントリー矢印をクリックします | 0_ae | 1 | 0#0#1 |
| 0 | eo | 入力を開く(リーダー) | 0_eo | 1 | 0#1#1 |
| 1 | ts | 入り口付近(改札口) | 1_ts | 0 | 1#0 |
| 0 | lr | 赤信号入力を押します | 0_lr | 3 | 0#0#3 |
| 0 | lg | 緑色の信号を入力してください | 0_lg | 3 | 0#1#3 |
| 3 | lr | 赤信号入力を押します | 3_lr | 3 | 3#0#3 |
| 3 | lg | 緑色の信号を入力してください | 3_lg | 3 | 3#1#3 |
| 3 | ly | 黄色の信号入力を押します | 3_ly | 0 | 3#0 |
| 3 | rr | 赤信号出力を押す | 3_rr | 5 | 3#0#5 |
| 3 | rg | 青信号を押す | 3_rg | 5 | 3#1#5 |
| 3 | x | 終了矢印を押す | 3_ax | 6 | 3#0#6 |
| 3 | XO | 出力を開く(リーダー) | 3_xo | 6 | 3#1#6 |
| 5 | ry | 黄色の信号機を押す | 5_ry | 3 | 5#3 |
| 6 | ts | 入り口付近(改札口) | 6_ts | 3 | 6#3 |
車の対応する遷移:

インターフェイスステートマシンの完全な生成ベクトル:
gen=[[0_ae, 0_eo, 0_ax, 0_ex, 1_ts, 2_ts, 0_lr, 0_lg, 0_rr, 0_rg, 3_ly, 4_ry, 3_ax, 3_xo, 6_ts, 4_ae, 4_eo, 7_ts, 3_lr, 3_lg, 3_rr, 3_rg, 4_rr, 4_rg, 4_lr, 4_lg, 5_ry, 5_ly, 5_lr, 5_lg, 5_rr, 5_rg], [0#1, 1#1, 0#2, 1#2, 0, 0, 0#3, 1#3, 0#4, 1#4, 0, 0, 0#6, 1#6, 3, 0#7, 1#7, 4, 0#3, 1#3, 0#5, 1#5, 0#4, 1#4, 0#5, 1#5, 3, 4, 0#5, 1#5, 2#5, 3#5]]
遷移アクションは、インターフェースの状態によって示されます。

さらに、移行時に、回転式改札機の条件が変わり、それが呼び出されます(信号ep、xp、lr、lg、ly、rr、rg、ry):
| 移行 | 状態 |
| 0#0#3.0#1#3 | ls |
| 3#0 | |
| 3#0#5,3#1#5 | bs |
| 5#3 | ls |
| 0#0#4.0#1#4 | rs |
| 4#0 | |
| 4#0#5,4#1#5 | bs |
| 5#4 | rs |
したがって、3つのステートマシンの助けを借りて、信号交換の助けを借りて単純な動的ACSモデルを構築し、かなり複雑な制御システムを実装できるようにしました。
将来、この記事および以前の記事で説明した原則に基づいたアクセス制御システムの実装の実例が提供されます。