そのため、オブジェクト(モバイルデバイス、MU)の場所を特定する方法に応じて、すべてのメソッドを条件付きで3つのグループに分けることができます。
- 三角測量の使用に基づいた方法(基地局に関連するコーナーでのモバイルデバイスの位置の決定)。
- 三辺測量の使用に基づく方法(基地局からの距離によってモバイルデバイスの位置を決定する)。
- 信号強度の測定に基づく方法。
I.三角測量の使用に基づく方法。
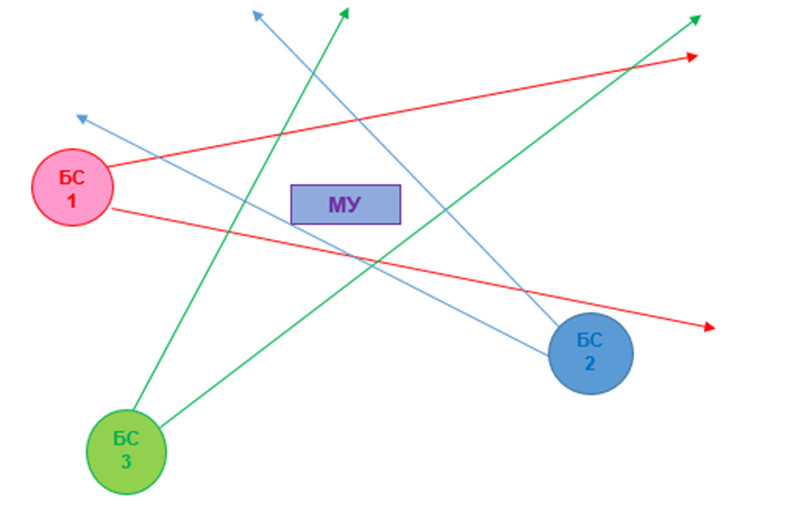
AoA(到来角)は 、信号源への方向の決定に基づいています。 このために、複数のアンテナ、回転アンテナ、またはフェーズドアンテナアレイを備えた基地局(BS)が使用されます。 BSから信号源への方向を受信すると、その位置を特定することができます。 BSの数が多いほど、このゾーンをより正確に判別できます。
+モバイルデバイスの位置を特定するための簡単なアルゴリズム。
+さまざまな物理的原理に取り組む能力。
+長距離;
-アンテナの複雑さ。
-モバイルデバイスの位置を特定する精度が低い。
II。 三辺測量の使用に基づく方法。

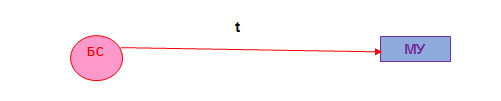
ToA(到着時間)メソッドは、モバイルデバイスとBS間の無線信号の伝搬遅延の測定に基づいています。 MUの位置を決定するための測定の最小数は3です。 モバイルデバイスは、正確に既知のBS時間に信号を送信します。 BSは、モバイルデバイスに信号を送信してから受信するまでの時間間隔を測定します。 距離は、式S = t * c(tは時間、cは光速)によって決定されます。
+モバイルデバイスの低消費電力。
+モバイルデバイスの位置を決定する高精度。
+長距離;
-すべてのBSおよびMUで時刻を同期する必要性。
-モバイルデバイスの場所を特定するための複雑なアルゴリズム。
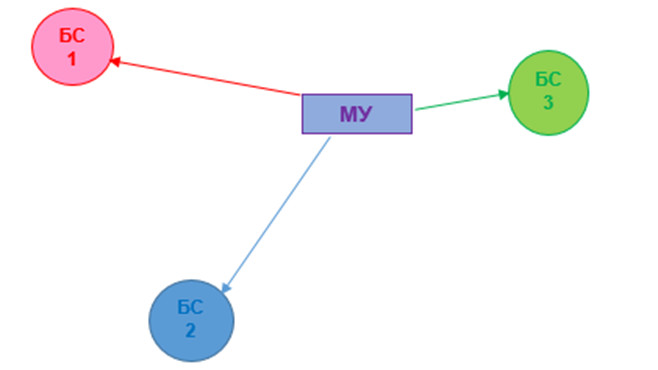
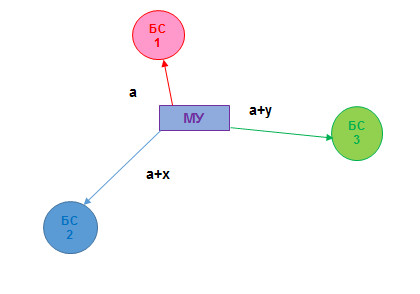
TDoA(到着の時間差)メソッドは、モバイルデバイスからBSへの信号送信の時間差を、同期クロックと所定の場所で測定することに基づいています。 数学的処理を使用して信号を受信する時間の違いを知ると、モバイルデバイスから基地局までの距離を取得できます。
+モバイルデバイスの低消費電力。
+モバイルデバイスの位置を決定する高精度。
+長距離;
-すべてのモバイルデバイス間で時刻を同期する必要性。
-モバイルデバイスの場所を特定するための複雑なアルゴリズム。
ToF(飛行時間)方式は、電磁波がBSからモバイルデバイスまでの距離を克服し、MUからの反射後にBSに戻るために費やす時間の測定に基づいています。 この時間を受信し、波の速度を知ると、モバイルデバイスからBSまでの距離を計算できます。 S = t * c / 2。
+モバイルデバイス-パッシブ(エネルギーを消費しません);
+モバイルデバイスの位置を決定する高精度。
+長距離;
+デバイス間の同期の必要性の欠如;
-MUは、BSの方向に電磁波を反射する必要があります。
-モバイルデバイスを分割することはできません。
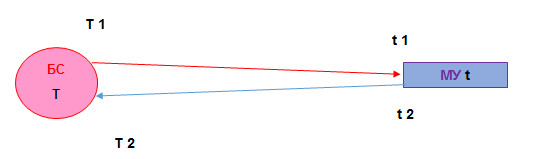
TWR(双方向レンジング)方式は次のとおりです:BSは信号を送信する時間(T1)を記録し、モバイルデバイスは信号を受信する時間(t1)を記録し、BSに信号を送り返す時間(t2)を記録します。 信号t1およびt2は、モバイルノードから基地局に送信されます。 BSはモバイルデバイスから信号を受信し、受信時刻を修正します。 距離は、式S =((T2-T1)-(t2-t1))* c / 2によって計算されます。 測定のイニシエーターは、同様のアルゴリズムに従ったモバイル機器でもよい。
SDS-TWR(対称両面双方向測距)方式もあります。これは、この手順を反対方向に繰り返すことに基づいており、計算が正しいことを確認するのに役立ちます。
+モバイルデバイスの位置を決定する高精度。
+長距離;
+デバイス間の同期の必要性の欠如;
-MUの高電力消費。
NFER、近距離電磁界レンジング -近距離電磁界内の距離を測定する方法で、電磁波の電気成分と磁気成分の間に位相シフトがあります。 BSは、特定の周波数の電磁波を放射します。 2つのアンテナを備えたモバイルデバイスは、波の個別の磁気成分と電気成分の振幅を測定し、それらの間の位相シフトを計算します。 波長とそれらの間の位相差(この差はBSの近くで90°から波長の半分に等しい距離でゼロまで変化します)がわかれば、BSからデバイスまでの距離を計算できます。
+モバイルデバイスの位置を決定する高精度。
+屋内で働く能力;
-アクションの小さな半径;
-複雑なアンテナ。
-モバイルデバイスの場所を特定するための複雑なアルゴリズム。
III。 信号強度の測定に基づく方法。
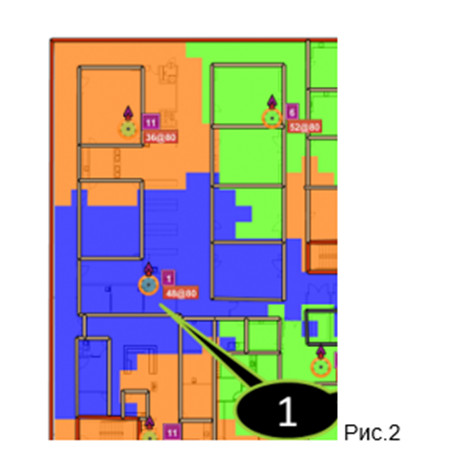
RSSI、受信信号強度インジケータは、 受信信号強度レベルのインジケータです。 この方法では、BSが受信した信号の強度に基づいてデバイスの位置を決定できます。逆も同様です。 この方法を使用するには、信号の電力レベルから距離への変換を使用するか、カバレッジマップに従って使用します(図2)。
+モバイルデバイスの低消費電力。
+低コスト。
-モバイルデバイスの位置を特定する精度が低い。
-MUの場所を決定するための複雑なアルゴリズム。

ほとんどのシステムは方法の組み合わせを使用して場所を決定することに注意してください。 このアプローチにより、あるメソッドの欠点を排除し、別のメソッドの特性を補完することができます。 さらに、さまざまなシステムがさまざまなタスクを設定しますが、その解決にはさまざまな方法が必要になる場合があります。 距離測定方法は、利用可能な機器とBSとモバイルデバイス間の同期の可用性に依存します。
したがって、RTL-ServiceのRealTracシステムは、IMU慣性測位技術とToFとRSSI方式の組み合わせを使用して位置を決定します。すべての慣性測位システムに固有の主な問題は、時間の経過とともに蓄積するエラーであるため、これに加えてToFとRSSI方式の使用この問題は、軌跡をローカル座標に定期的にリンクすることで解消できます。