昨年の夏、プラハのチェコ工科大学で開催されたコンピュータービジョンのサマースクールについて記事で書きました。 3月末、私は幸運にも、このグループの別の1日イベントに参加することができました。このイベントは、プラハのCTUの同じマシン知覚センターによって開催されました。 今回は、昼休みとコーヒーブレイクでの6つのレポートのシリーズでした。 イベントの主なトピックは、コンピュータービジョンと機械学習アルゴリズムでした。 ディープラーニングに関する多数のレポートから判断すると、この分野はコンピュータービジョンの問題を解決する上で非常に人気のある傾向になりつつあります。 猫の下で詳細を尋ねます。 注意トラフィック!
このイベントは、プラハの中心部にある電気工学部の非常に美しい歴史的建物で行われました。

サマースクールの講師として、コンピュータービジョンの分野の研究に携わっている世界中のさまざまな大学から招待された学術専門家が招待されました。 その中には、CTUの博士課程の学生もいました。
講義の半分は、グラフィカルモデル、ディープラーニング、機能マップを含む機械学習に専念しました。
アントニン・スルクは、コンピュータビジョンの興味深い方向性-光の場と実際の応用について語りました。 まず、技術そのものを紹介しました。これは、コンパクトライトフィールドカメラLytro Illumの開発のおかげで生まれました。 色情報に加えて、このようなカメラは各ピクセルの光線の入射角に関する情報も提供します。 このようなカメラの最も簡単なアプリケーションは、カメラの焦点を背景から前景のオブジェクトに、またはその逆に変更することです。 ライトフィールドテクノロジーは、構造からの動きに使用されます。これにより、画像を複数のレイヤーに分割し(たとえば、画像の反射面と透明面を強調表示)、深度を効果的に評価(深度マップを作成)できます。
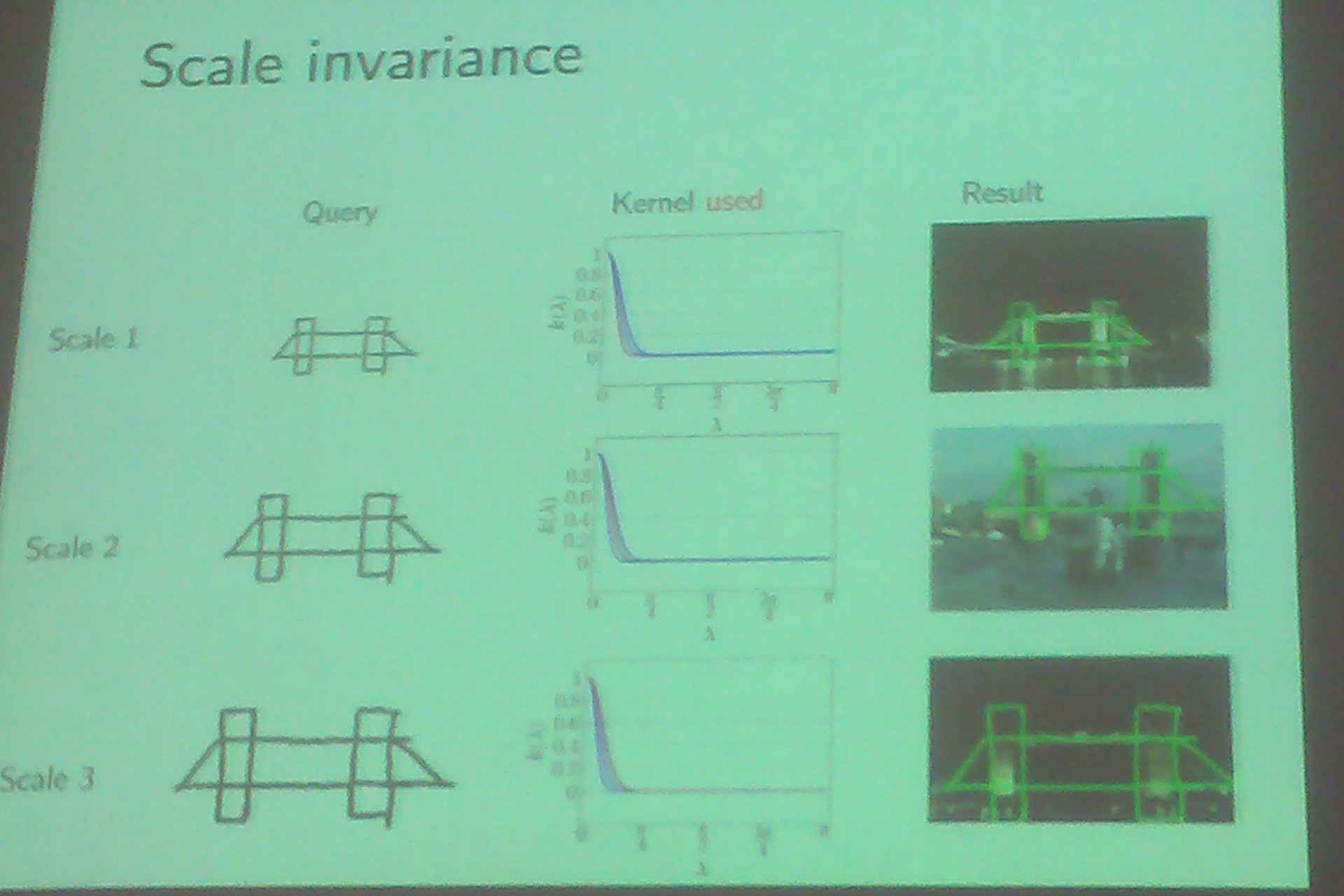
CTUの博士課程の学生であるGiorgos Toliasが、リクエストとして手作りのスケッチを使用して画像を検索できる機能記述子の開発について話しました。
私の意見で最も興味深いのは、Yannis Avrizisaによるレポートで、多次元空間でのクラスタリング問題を解決するための近似検索方法について話しました。 彼は、多次元空間での検索の問題について説明し、どのコンピュータービジョンの問題でこの問題が解決されるかを示しました(画像検索、撮影された写真の位置の推定、単語の袋、クラスタリング)。 バイナリコード、量子化(ベクトル、製品量子化)、クラスタリング(k-meansとそのさまざまな修正、Gaussian混合ランク検索、逆量子化k-means)など、さまざまな近似検索方法も提示されました。 すべてのメソッドは、詳細な数学的説明とともに提示され、グラフィカル形式でグラフィカルに表示されました。

プログラム全体に精通し、次のリンクからプレゼンテーションをダウンロードできます: cmp.felk.cvut.cz/cmp/events/colloquium-2016.03.31
主要部分が終わった後、全員がCMPセンターの作業室への短い遠足を行いました。
最初に、特定の画像フラグメントの類似画像のオンライン検索エンジンを紹介しました。 ユーザーは、関心のあるオブジェクト(たとえば、大聖堂のドーム)をフレームにフレームし、それに応じて、同じ視点から、異なる視点から、異なるスケールで、さらに詳細にこのオブジェクトを含む可能性のあるすべての関連画像を受け取ります。
プロジェクトについて詳しく知りたい人のためのプロジェクトに関する記事へのリンクはこちらです: cmp.felk.cvut.cz/~chum/papers/mikulik_sisap13.pdf
その結果、その日は波乱に富み、有益なものとなった。 将来、他の同様のイベントに参加できるようになることを願っています。 このイベント(パターン認識とコンピュータービジョンコロキウム)は、2015年11月に開催された前回の6か月ごとに開催されます。このようなイベントにより、専門家と知り合い、コンピュータービジョンの分野の新しいトレンドとテクノロジーについて学ぶことができます。
みなさんの幸運を祈り、新しいレビューをお待ちしています!