はじめに
事故の統計によると、現在、フライトの最も危険なセクションはまだ着陸しています。 また、ほとんどの場合、人員の過失により事故が発生します(図1)。 したがって、着陸段階で航空機を制御するためのパイロットの行動を評価するタスクは、飛行の安全性を向上させるため、民間航空および軍事航空の両方に関連しています。

図 1.飛行の段階および人員の違反の種類ごとの事故の分布の図
オンボード記録装置(BUR)からの情報に基づいてパイロットの品質を評価するための既存の方法の分析は、それらの有効性の欠如を示しました。
戦闘訓練コース(KBP)に従って、着陸操縦の品質の評価は、空中および地上ベースの客観的制御手段からのデータ、ならびに飛行管理グループのインストラクターと人物の観察に基づいて決定されます(図2)。
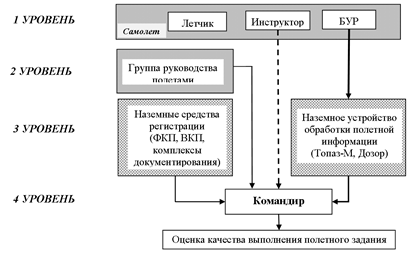
図 2.評価の構造
KBPによれば、滑走路の4つの制御セクション(図3)で飛行パラメーターを分析することにより、機内RNSの材料に基づいて着陸段階で操縦技術が評価されます:滑走路に触れます。
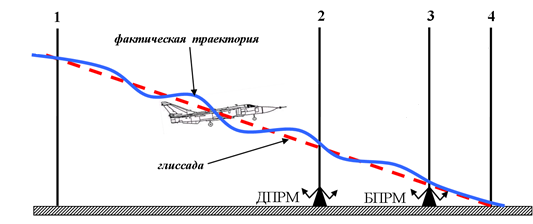
図 3.グライドパスに沿った航空機の削減
同時に、飛行データは完全には使用されません。着陸の品質を評価するために設計局が設定した14の規制パラメータのうち、BUR材料から決定されるパラメータは35.7%で5つだけです。 残りのパラメーターは、インストラクターとフライト管理グループの人の観察に基づいて決定され、最終評価に主観のかなりの割合を占めます。
したがって、グライドパスに沿った降下の全段階を通じて航空機の操縦の性質を考慮し、通常のBURによって記録されるパラメーターでKBP方法論を補足する必要があります。
着陸段階でのパイロットの行動を評価するための既存の方法の修正
[1-3]では、着陸時の航空機操縦stickの運動構造が操縦品質の特性であることが証明されました(パイロットが航空機をどの程度自信を持って操縦しているかを示しています) 。 これらの作業に基づいて、操縦の品質を評価するための有益な機能の役割では、パラメータ「航空機のピッチコントロールスティックの偏差の角度」を使用することをお勧めします。
 、標準のオンボード登録デバイスを使用して、すべての最新の航空機に登録されます(図4)。 この方法では、着陸段階全体でパイロットの行動を評価できますが、さらに主観性に欠けています。 縦長チャネルの典型的な航空機制御システムを図5に示します。
、標準のオンボード登録デバイスを使用して、すべての最新の航空機に登録されます(図4)。 この方法では、着陸段階全体でパイロットの行動を評価できますが、さらに主観性に欠けています。 縦長チャネルの典型的な航空機制御システムを図5に示します。

図 4.さまざまなクラススキルのパイロットの着陸段階でのピッチピッチ偏差パラメータの変化のグラフ。 a)第1クラスのパイロット。 b)クラスのないパイロット。 c)支配権の移転

図 5.縦方向チャンネルの航空機制御システム(MU-615A-ポテンショメトリック角変位センサー、RP-ステアリングギア)
上記の評価方法を、KBPのパイロット技術を評価するためのよく知られた方法論に統合することが提案されています。 したがって、最終評価への滑空経路に沿った降下の全段階でのパイロットの行動を特徴付ける追加の客観的指標の導入により、最終評価の客観性の割合が増加します。
作品[4、5]に基づいて、着陸推定に信号スペクトルを使用することが提案されています。
、そしてこのスペクトルとパイロットの訓練レベル(または飛行指揮官が設定した評価)の関係のモデルを構築するには、クールな資格を特徴とし、教師と機械学習法を使用します。
提案された方法の実装における入力特徴として、正規化された平滑化スペクトルのサンプルが使用されました
 調査された離散信号 、および出力記号として-パイロットのクラス番号。
調査された離散信号 、および出力記号として-パイロットのクラス番号。
入力符号ベクトル
以下で説明する変換を使用して形成されます。
- 離散信号のスペクトルFを計算します 長さN
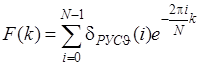 ;
;
- 周波数が0.5 Hz未満の信号振幅はゼロになり、迎え角に沿った航空機の自然振動の周波数に関連する信号の情報成分が除外されます。
- スペクトルを0から2.5 Hzの形にし、バイキュービック補間を使用して、結果の特徴ベクトルのサイズを固定値に変更します(ベクトルを取得しました)
 );
); - スライディングウィンドウ法を使用してスペクトルを平滑化し、より均一なデータを取得し、振幅を正規化します。
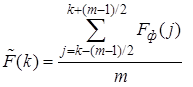 、
、
 、
、
ここで、 mはウィンドウサイズ(実装ではm = 10 )、 Kはすべての値を超える定数です。 (実装ではK = 250 )。
(実装ではK = 250 )。
信号スペクトル間の関係のモデルの構築
そして、パイロットのクラス番号は、教師との2つの機械学習アルゴリズムを使用して実行されました。カーネルとしての動径基底関数を使用したサポートベクトル法(SVM)と勾配ツリーブースティング法(GBT)です。
実装では、GBTは次のパラメーターとともに使用されました。
- 損失関数のタイプ-異常な損失;
- ブースティングの反復回数-3000;
- 正則化パラメーター-0.0008;
- サブサンプルの部分-0.0001;
- 決定木の最大深さ-1;
- サロゲートを使用します。
予測可能なパイロットクラス番号の洗練
アルゴリズムの弱点を特定するために、テストが実施され、エラー分布図が計算されました。 これらの図の1つを図6に示します。
テストに使用したデータベースの説明は、「結果とディスカッション」セクションに記載されています。
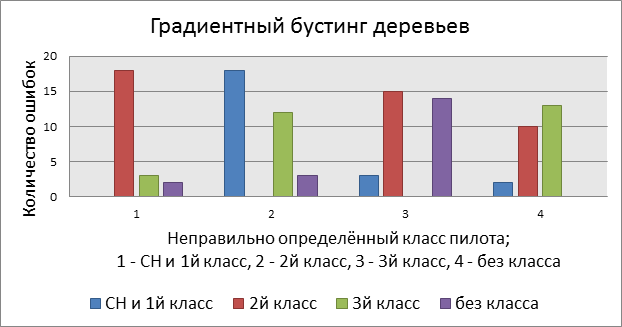
図 6. GBT方式のエラー分布図
図の最初の3列(図6)は、誤って検出された1番目のクラス(狙撃兵を含む)のケースに対応し、赤い列は1番目のクラスが2番目のクラスとして定義されている場合に対応し、緑の列は1番目のクラスの場合に対応しますクラスは3番目のクラスとして定義され、青色の列は、1番目のクラスがクラスなしとして定義されている場合に対応しています。 同様に、2番目、3番目のクラス、および「ゼロ」クラス(クラスなし)に対応する2番目、3番目、および4番目の列のトリプルについても同様です。
エラー分布図の分析により、ほとんどの場合、アルゴリズムが1つのクラスと間違えられていることが示されたため、将来、最も近いクラスのペアごとに個別の分析を行うことが合理的です。 たとえば、バイナリ分類器に既にあるパイロットの予測クラス番号を指定します。
次のバイナリ分類子が実装で使用されました。
- 予測されたクラスが「3番目のクラス」である場合、SVMメソッドを使用して、2番目と3番目のクラスのパイロットを分類します。
- 予測されたクラスが「クラスなし」である場合、GBTメソッドを使用して、クラスなしの3番目のクラスのパイロットを分類します。
結果と考察
分類アルゴリズムの一般化能力を評価するための標準的なスキームによれば、利用可能なすべてのデータはトレーニングサンプルとテストサンプルに分割されます。 ただし、入力セットの数が多いため、トレーニングセットにはできるだけ多くの例が必要です。そうしないと、分類アルゴリズムに依存モデルを構築するための十分な情報がない場合があります。 分類の品質を高い精度で評価するには、テストセットの多数の例も必要です。
この場合、利用可能なデータの量は限られているため、分類アルゴリズムの一般化能力を評価するために、相互検証法が使用されます。
使用可能なデータはすべて5つのばらばらのブロックに分割され、各ブロックには、パイロットクラスごとに12サンプルの48サンプルが含まれています。クラスなし、クラス3、クラス2、クラス1(狙撃パイロットを含む)。 データは機動性のある航空機の航空機搭載登録デバイスから取得されました(航空機の名前は言えません) 。 結果を下の表に示します。
| アルゴリズムの種類 | アルゴリズム誤差E 、単位 | ||||
|---|---|---|---|---|---|
| 全体的な精度 | ファーストクラスとパイロットの狙撃兵 | 2年生 | 3年生 | クラスなし | |
| SVMメソッド | 0.5526 | 0.5667 | 0.6167 | 0.3167 | 0.7152 |
| GBTメソッド | 0.5566 | 0.6167 | 0.3667 | 0.5167 | 0.7318 |
アルゴリズムの有効性の最終評価:

 次の式に従って計算されます。
次の式に従って計算されます。

どこで
 -ミスがあったテストケースの数、
-ミスがあったテストケースの数、  -テストサンプルのテストケースの数。
-テストサンプルのテストケースの数。
結果の分析により、GBTメソッドによって全体的に最高の精度が示されたことが示されました。 さらに、バイナリ分類器での予測パイロットクラス番号の改良により、SVMメソッドの全体的な精度が2%、GBTメソッドの全体的な精度が3%向上しました。
結論
機械学習法を使用することにより、グライドパスに沿った航空機の降下段階でのパラメーター「航空機操縦stickのピッチの偏差」とパイロットの訓練レベルとの相関関係を実験的に確認することができました。 樹木のサポートベクトル法と勾配ブースティングで得られた精度は55%です。 したがって、信号「航空機のピッチコントロールスティックの偏差角」のスペクトルは、着陸段階でのパイロットの行動を評価するための追加のパラメーターとして使用でき、このスペクトルの推定値を設定するシステムの構築は、教師による機械学習アルゴリズムを使用して実行できます:参照ベクトルと勾配木ブースティング。
文学
- 航空医学/編 N. M.ルドニー、P.V。ヴァシリエフ、S.A。ゴズロフ。 -M。:医学、1986。-580 p。
- Gladkov B. M.制御行動の指標を使用したパイロットの訓練の自動評価:飛行安全性の確保の問題に関する科学的および方法論的資料。 イルクーツクWWAIU / B. M.グラドコフ。 -I.、1991。-C. 73–79。
- Frolov N.I.飛行中のパイロットの健康状態を研究する方法/ N.I. Frolov // Space Biology。 -1978年。-1番。-S. 3-10。
- 特許番号2436164ロシア連邦、IPC G07C 11/00、G08G 5/00。 標準のオンボード登録デバイス/ Poluektov S.P.、Kashkovsky V.V.、Tikhiy I.I.、Lapin I.P.に従って、着陸段階でパイロットが航空機を操縦する品質を評価する方法; ロシア連邦国防省の連邦航空技術大学高等軍事航空大学(ボロネーズ)の申請者および特許権者。 -いいえ。2010140360/ 08。 宣言された 10/01/2010; publ。 12/10/2011、ブル。 番号34。 -3ページ
- Poluektov S.P.航空機の操縦の品質を評価する自動システムの機能を拡張するアプローチの1つ/ S.P. Poluektov、E.P。Kolesnikov //航空開発分野における科学技術の実際の問題:III国際科学技術の要約の収集航空学部の会議。 -ミンスク:2013年ベラルーシ共和国陸軍士官学校。-P. 81–82。
著者
博士号 Poluektov S.P.
ナフィコフM.A.
ナフィコフM.A.
UPD: プロジェクトとデータベースへのリンク 。