
それらは、使用される吊り上げ容器(スキップ、スタンド、タブ)と吊り吊り吊り容器の数(シングルエンド、ダブルエンド)の両方で異なるタイプです。 メカニックの観点から、そこには多くのニュアンスがあります。 説明はこちらとこちらでご覧いただけます 。
ドライブも異なります。 DCおよびAC。 交流の場合、これらは、位相回転子を備えた高電圧非同期モーター、同期モーター、かご形回転子を備えた低電圧非同期モーターです。 位相回転子を備えた高電圧非同期電動機のサイロについて説明しましょう。
はじめに
マイニングが発生するすべての企業で、企業の成功の主な指標は、採掘された鉱石の量です。 現代の活動では、採掘された鉱石の重量はさまざまな方法で測定されます。 引出し場所から処理または保管場所、鉄道車両(ある場合)などへの輸送中の自動車の重量測定 これがすべての場所です。 しかし、そのようなシステムは資本コストの点で高価です。 しかし、吊り上げ容器での輸送の段階で、調達された鉱石の重量を測定するとどうなりますか? 可能です。
多くの理論と公式
リフティング船によって輸送される貨物の質量は、リフティングエンジンのモーメント、またはトラクションドラムの周囲でエンジンが発生する力によって決まります。 測定は、一定のエンジン速度で直線的に実行されます。 このとき、半径Rの円にかかる力Fは、質量Mgrの貨物を輸送するのに必要な力の合計に等しく、また、地雷抵抗力Fおよび昇降装置の上昇および下降した枝の静的不均衡力Fstに打ち勝ちます:

ここで、g-重力加速度、i-ギア比。
同じ速度で移動するときの「計量」の時点では、シャフトの抵抗力と静的な力の初期差は変化しないため、持ち上げる負荷の質量を計算するには、測定力Fから定数FとFを減算する必要があります。
定数Fとは、特定のリフトごとに、起動段階で計算できます。 これを行うには、空の容器を持ち上げてエンジンで発生した力を測定し、その後、荷物を持ち上げる力からそれを取り去るだけで十分です。
叙情的な余談
このような鉱石の質量の測定では、宝石の精度を達成することはできません。 そして、商業会計の場合、エラーは大きすぎます。 概算では、2〜3%の範囲になります。 しかし、技術会計では、このエラーは許容範囲です。 この方法の利点は、機械の重要なコンポーネント(ロードセル、フレーム構造など、他の計量システムで使用される)がないため、デバイスのシンプルさと安価さにあります。
また、吊り上げ設備では、初期の不均衡に加えて、鉱石の船壁への付着、船のライニングの摩耗に起因して、サイクルごとに変化する可変成分Fperがあります。 ダブルエンド吊り上げ装置Fperでは、実際の荷重と比較して負荷の質量の計算がゆがみますが、実際には数回の吊り上げサイクル後の総質量の計算には影響しません。 ある船舶の残りの鉱石は、別の船舶の新たに持ち上げられた貨物の質量から差し引かれます。
設置に容器とカウンターウェイトを使用する場合、測定段階で、変動成分の影響を最小限に抑えるために、次のことが発生します。 空の容器を下げてカウンターウェイトを持ち上げる間、エンジンによって発生する力が測定されます。これは、容器に付着している質量とライニングの摩耗により、キャリブレーション中の力とは異なります。 そして、船を持ち上げるとき、力の差を力から差し引く必要があり、それによって可変成分を補償します。
誘導モーター
半径Rの巻線円上でACモーターによって発生する力Fは、次の式で決定されます。

どこで:
- Uf、If-モーターの相電圧と電流相、
- fは電圧と電流の間の角度です。
- wは角速度(2 * P * n / 60、nはモーターローターの回転速度)、
- rは、固定子の位相抵抗と供給ケーブルです。
この式は、機能する電気モーターの対称負荷に対して有効です。
電流に比例する信号は、標準電流出力が0〜5Aの変流器の2次巻線から除去されます。 電圧に比例する信号は、変圧器からのものです。
モーターの相電圧を測定するには、相電圧変圧器、つまり100 /√3ボルトあたり6000 /√3の特性を持つ変圧器を設置する必要があります。 これらは追加費用です。 高電圧モーター制御セルには、変流器と変圧器がすでに取り付けられています。 真の変圧器は、100ボルトあたり6000の特性を持つ線形電圧を測定します。
電流と電圧の2つの信号があるため、残りの量を計算することは難しくありません。
MKの信号処理
MCの3相電圧の1相の電流と電圧の実効値は、次の式で計算できます。
どこで:
- U、I-電圧、電流の実効値、
- ADCi-電圧の瞬時値、ADCによって測定された電流、
- Kは一般化係数(変換係数、ADC単位あたりの係数)、
- Nは、ネットワーク周波数期間の測定数です。
1つの相の有効電力は、式によって計算されます。

どこで:
- ui、ii-ADCによって測定された電圧、電流の瞬時値、
- Nは、主電源電圧の期間の測定数です。
- Kは一般化係数です。
また、計算には余弦ファイを計算する必要があります。

エンジンが発生する力を計算する式の残りの変数は定数です。
高電圧セルにはリニア電圧トランスが設置されているため、リニア電圧を考慮して力の式を書き換えることができます。 彼女は次の形を取ります。

しかし、相電流と線形電圧の信号がある場合、有効電力とコサインphiを計算することはできません。コサインは、電圧と電流の有効値とともに、方程式の主な変数です。 コサインphiは、エンジンの動作中に大きく異なります。
いつものように、この問題にはいくつかの解決策があります。
- 変流器を設置した状態で相電圧変圧器を同じ相に設置します(追加費用、高電圧変圧器には特定の設置要件などがあります)。
- 隣接する2つのフェーズに含まれるリニア電圧トランスを使用します。 つまり、変流器はB相に含まれ、電圧変成器はA相とC相に含まれます(基本的に、このような変圧器は、電動機に電力を供給する高電圧セルに既にあります)。
2番目の方法に進みます。
電気工学を思い出す
変圧器の典型的な組み込みは、図に示されています。

三相電圧図:
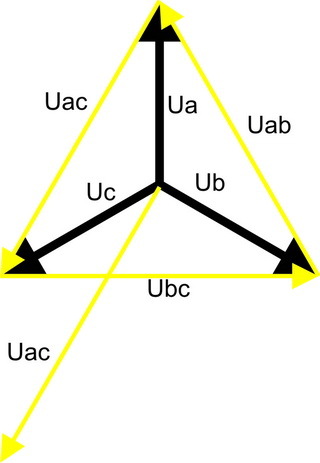
相電圧Uvと線形Uacの角度は-90°です。 変圧器の二次巻線の電圧は、100ボルトのアクティブ電圧、つまり141ボルトの振幅です。 このフォームでは、MKで運転することはできません。 スケーリングする必要があります。
さて、B相と一致するように線形電圧の位相を90°遅らせる必要があります。この場合、通常の1次ローパスフィルターであるRCチェーンが役立ちます。
RC回路の主な機能。
ギア比:

位相角:

マイナス記号のある角度なので、これは、出力電圧の位相が角度inputだけ入力電圧の位相より遅れることを意味します。
通常のRCサーキットを使用して、「1石で2羽の鳥を殺す」。 MKで処理するために、信号を1ボルト以内にスケーリングする係数。 また、90°に近い位相シフトがあるため、RC回路後の正弦波の位相は、変流器が接続されているB相と一致します。 その結果、相電流と相電圧を使用すると、エンジンで発生する力のすべての計算が有効になります。
このケースでは、RとCの値を計算します。
フィルター計算
変圧器には100ボルトの電圧が付属しています(標準)。 これは現在の電圧です。したがって、振幅値を決定するために、2のルートを乗算します。
合計:Umax = U * 1.41 = 141V。
これは正弦波であり、正の半波と負の半波の両方があります。 したがって、MKの場合、この正弦波を正のユニポーラ電圧に「適合」させる必要があります。
供給電圧MKは3インチです。 したがって、正弦波の中点は1.5ボルトになります。 半波電圧の合計の大きさは1.5ボルトです。 ここから、RC回路のゲインは次のようになります。

ここで、係数Kに基づいて値τ= RCを計算します。信号周波数は50 Hzです。
数学的変換の後、τ= RC = 0.318が得られます。
ここから

角度は私たちに合っています。 0.57°の位相誤差で測定誤差を計算します。したがって、誤差は(0.57°/ 90°)* 100%= 0.63%です。これは周期の1/4であり、したがって360°以下です。 電流および電圧トランスの精度クラスが0.5%を超えることはほとんどありません。 そのため、フィルターによって導入される歪みは無視できます。
RおよびC自体の値を計算することは残っていますが、コンデンサーからプッシュオフする方が適切です。 C = 4.7μF、したがってR =τ/ C = 0.318 / 4.7 * 10-6 = 318 * 10-3 / 4.7 * 10-6 = 67.66 * 103オームまたは67.66 kOhms 。
抵抗値は10キロオームだけ大きくする必要があります。これにより、6000ボルトを少し超える電圧を測定できるようになります。この値はもっと小さく、400〜500ボルトよりも大きくなります。 さらに、角度φがわずかに増加し、計算の精度が向上します。
少しの回路
回路の電流センサーは、集積回路ACS712ELCTR-05B-Tになります。ここにそのPDFがあります。 私たちの主なデバイスは、出力特性が0〜5 Aの変流器です。もちろん、小さな抵抗のシャントに負荷をかけてから、オペアンプを介してスケールを必要な制限に調整できます。 コストはかかりますが、開発コストを削減することはそれほどありません。 ACS712を適用すると、2.1 kVRMSで電気的絶縁も得られます。 また、具体的なプラス。
変圧器から信号を直接取得し、さらに処理するためにRC回路に送ることができます。 ただし、プライマリデバイスからデバイスへのケーブルラインは十分な長さであるため、電気的に切り離すこともできます。 ここでは、ギア比が1の低電力のリニアトランスを使用できます。 出力電圧のみがRCフィルター後の位相シフトと振幅に必要な誤差を得るための条件に対応している場合は、別のものを使用できます。 そのような包含物のRとCの計算は上記で与えられています。
これらの信号はすべて、初期処理および値の正規化の後、MKに送られ、受信した情報に基づいて計算を行うことができます。 そして、便利で必要なものとして既に誰かにそれを表示すること。 デバイスに何らかのインターフェイスを装備し、たとえば、データをリフトマネージャーのランプシステムに転送します。 この点でのファンタジーはほとんど無限です。
以下にそのような近似スキームを示します。
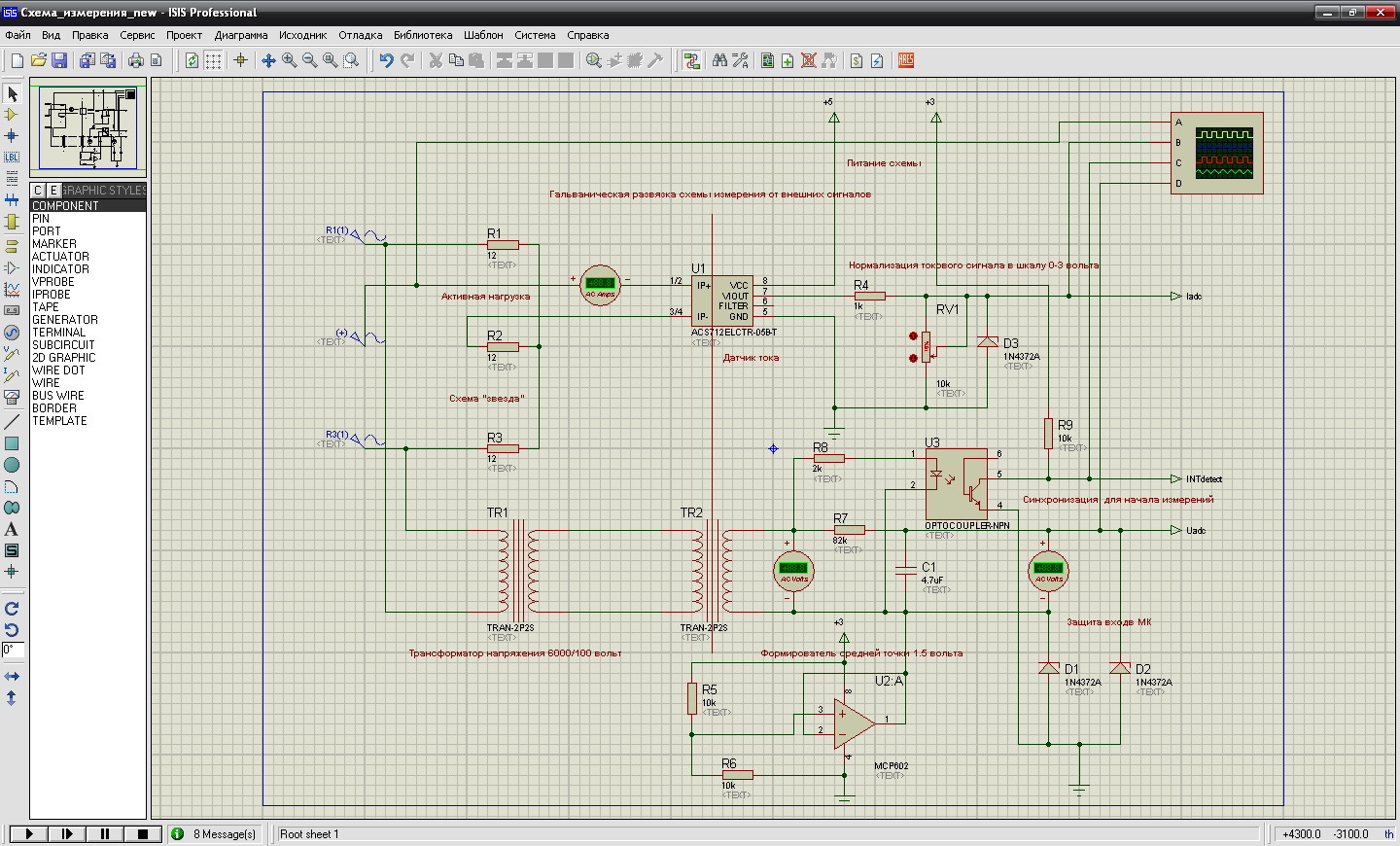 写真はクリック可能です。
写真はクリック可能です。
この場合のフォトカプラの使用は、任意の開始点からの測定の開始を同期することにより決定されます。 これを含めると、オプトカプラーの出力は、線形電圧Uacの正の半波、つまりRC回路後の電圧が最大になったときに検出します。 ある期間にわたって電圧を測定する際にエラーが生じると誰かが言うでしょう。 ただし、ゼロではなくても正弦波の同じポイントで常に測定を開始し、複数の周期を測定するため、この瞬間は係数で補正できます。 同じ原則が電流にも当てはまります。
現在、電流、電圧の現在値を計算し、有効電力を計算する式を使用して、質量の計算に必要な変数を計算できます。 方程式の残りの定数は、各サイロの特徴です。
結論として、このスキームの機能を示す短いビデオ。
プロテウスプロジェクトのアーカイブはこちらです。
PS
継続:ステータ電流による鉱石重量の測定。 練習。 パート1. MKの信号処理アルゴリズム