
いくつかの質問と読者のコメントを予想します。
なぜNXT Mindstorms 2.0なのか? 私のプロジェクトにとって、このセットは私にとって最も適しているように思えたからです。 NXTマイコンはMRDS 4およびNI LabVIEWプラットフォームと完全に互換性があり、このキットはさまざまなロボット構成を組み立てるという点でも非常に柔軟性があり、ロボットの組み立てに最小限の時間しかかかりません。
MRDS 4とNI LabVIEWプラットフォームはなぜですか? それは歴史的に起こりました。 大学の上級コースで勉強していたのは、これらのプラットフォームを使用してトレーニングコースを開発することでした。 さらに、プラットフォームの開発と機能は十分に容易であるため、これらを使用すると、ロボットを直接制御するプログラムを作成し、ユーザーインターフェイスを開発して、仮想環境でテストを実行できます(MRDS 4の場合)。
しかし、これらのレッスンが必要なのは、ネット上で、ロボット工学に関する非常に多くのプロジェクトです! このバンドル(NXT + MRDS 4 / NI LabVIEW)を使用すると、トレーニングに関する記事はほとんどなく、ネイティブプログラミング環境が主に使用され、すべてが簡単になります。 ロボット工学、プログラミングに興味があり、NXTのセットを持っている(そしてそれらの多くがあります)すべての年齢の聴衆。
グラフィックプログラミング言語は悪であり、異端者をプログラミングする人たちはそれらに! グラフィカルプログラミング言語のMRDS 4とNI LabVIEWには間違いなく欠点があります。例えば、狭いタスクに焦点を当てていますが、それでも機能的にはテキスト言語よりも劣っていません。さらに、NI LabVIEWは科学的および工学的問題を解決するための学習しやすい言語として開発されました、これには多くの必要なライブラリとツールが含まれています。 したがって、これらのグラフィック言語は、問題を解決するのに最適です。 そして
これはすべて子供っぽく見え、まったく深刻ではありません! タスクがアルゴリズムを実装し、プログラミング、ロボット工学、リアルタイムシステムの基本と原理を回路やプロトコルに深く入り込まずに教える場合、これは非常に適切なツールですが、安価ではありません(NXTスイートに関して)。 Arduinoベースのキットは同じ目的に適していますが、このコントローラはMRDS 4およびNI LabVIEWとほとんど互換性がなく、これらのプラットフォームには独自の魅力があります。
使用されている技術は腐敗した資本主義国の産物であり、著者は人々の敵であり、西洋の共謀者の共犯者です! 残念ながら、電子工学とコンピューター技術の分野の技術のほとんどは西洋からのものです。もし彼らが国内生産の同様の技術を示してくれたらとても嬉しいです。 それまでは、所有しているものを使用します。 そして、これのために悪を守るための
MRDS 4およびNI LabVIEWプラットフォームの概要。
用語を明確にします。 この場合のプラットフォームとは、MRDSのVPL言語やアプリケーションランタイムなど、さまざまなツールのセットを意味します。 アプリケーションを実行可能(* .exe)ファイルに直接コンパイルすることはできません。
2006年に、MicrosoftはMicrosoft Robotics Developer Studioプラットフォームの作成を発表しました(詳細については、Wikipediaの記事を参照してください )。 MRDSはWindows-ロボットおよびシミュレーション指向のアプリケーション開発環境です。 現在、Microsoft Robotics Developer Studio 4のバージョンが関連しており、その機能には、VPLグラフィカルプログラミング言語、WebおよびWindows指向のインターフェイス、VSEシミュレーション環境、センサーへの簡単なアクセス、マイクロコントローラーおよびロボットのアクチュエーター、C#プログラミング言語のサポート、 CCRおよびDSSアプリケーションのマルチスレッドプログラミングと分散実行、多くのロボットプラットフォーム(Eddie、Boe-Bot、CoroBot、iRobot、LEGO NXTなど)のサポート。
LabVIEW(Laboratory Virtual Instrumentation Engineering Workbench)は、ナショナルインスツルメンツのグラフィカルプログラミング言語「G」で作成されたプログラムを実行するための開発環境およびプラットフォームです(詳細については、 Wikipediaの記事を参照してください )。 LabVIEWは、データ収集および処理システムのほか、技術オブジェクトや技術プロセスの管理にも使用されています。 イデオロギー的に、LabVIEWはSCADAシステムに非常に近いですが、それらとは対照的に、産業制御システム(自動プロセス制御システム)の分野ではなく、ASNI(自動化された科学研究システム)の分野で問題を解決することに焦点を当てています。 LabVIEWで使用されるグラフィカルプログラミング言語「G」は、データストリームアーキテクチャに基づいています。 このような言語での演算子の実行順序は、命令の順序(命令型プログラミング言語の場合)ではなく、これらの演算子の入力に関するデータの可用性によって決まります。 データで関連付けられていない演算子は、ランダムな順序で並列に実行されます。 LabVIEWは仮想計測器(Eng。Virtual Instrument)と呼ばれ、2つの部分で構成されています:
- 仮想デバイスのロジックを説明するブロック図。
- 仮想アプライアンスのユーザーインターフェイスを説明するフロントパネル。
LEGO NXT Mindstorms 2.0パックのクイックツアー。
NXTキットは、コントロールユニット、4つのセンサー、3つのサーボで構成されています。 コントロールユニットには以下が含まれます:
- 256 KBのフラッシュメモリと64 KBのRAMメモリを備えた32ビットAVR7マイクロコントローラー。
- 4Kバイトのフラッシュメモリと512バイトのRAMメモリを備えた8ビットAVRマイクロコントローラー。
- Bluetooth無線モジュールV 2.0。
- USBポート
- サーボを接続するための3つのコネクタ。
- センサーを接続するための4つのコネクタ。
- 99x63ピクセルの解像度のLCDディスプレイ。
- スピーカー;
- 6本の単三電池用コネクタ。
センサー(異なるトリムレベルの異なるセンサーセット):
- 超音波センサー;
- 2つの触覚センサー(タッチセンサー);
- 色検出センサー。

図1-センサーとアクチュエータが接続されたNXTマイコン
そしてもちろん、このキットにはLEGO TechnicフォームファクターのさまざまなLEGOパーツが含まれており、そこからアクチュエーターと支持構造が組み立てられます。

図2-LEGO Technicフォームファクターの詳細
最初のアプリケーションを作成しています。
最初のアプリケーションを作成します。 古典的に、このアプリケーションが「Hello、World!」というテキストを表示するとします。 実装はMRDS 4とNI LabVIEWで交互に行われますが、その過程で各プラットフォームの仕様を検討します。
MRDS 4およびNI LabVIEWプラットフォームをプレインストールします。MRDS4の場合、 インストールはキリル文字(ロシア文字)で構成されていないフォルダーで実行する必要があり、ユーザーアカウントもラテン文字のみで構成する必要があります 。
1. MRDSプラットフォーム4。
VPL環境を開始します([スタート]メニュー-すべてのプログラム-Microsoft Robotics Developer Studio 4-Visual Programming Language)。 この環境では、VPL言語でアプリケーションを開発し、仮想VSE環境でテストを実施できます。 VPLのプログラムは、相互接続されたブロックで構成される図です。 開いたウィンドウには、標準のコマンドバーとメニューに加えて、5つのメインウィンドウがあります。
- 基本アクティビティ-定数、変数、条件などの演算子を実装するベースブロックが含まれます。
- サービス-MRDSプラットフォームの機能へのアクセスを提供するブロックが含まれます。たとえば、ロボットのハードウェアコンポーネントと対話するためのブロック、またはダイアログボックスを呼び出すためのブロック。
- プロジェクト-プロジェクトに含まれる図とさまざまな構成ファイルを組み合わせます。
- プロパティ-選択したブロックのプロパティが含まれます。
- ダイアグラムウィンドウ-アプリケーションのダイアグラム(ソースコード)を直接含みます。

図3-VPLプログラミング環境
次の一連のアクションを実行します。
- データブロック([基本アクティビティ]ウィンドウから)および[シンプルダイアログ]サービスブロック([サービス]ウィンドウから)を追加します。
- データブロックに「Hello、World!」(引用符なし)と入力し、Stringデータ型を選択します。
- DataブロックをSimple Dialogブロックに接続すると、ダイアログボックスが表示され、
- さらに、図のようにすべてを実行します

図4-接続ウィンドウ

図5-データ接続ウィンドウ

図6-ダイアグラムの完成図
- 実行するプログラムを実行します。

図7-プログラムの結果
2. NI LabVIEWプラットフォーム。
このプラットフォームでは、すべてがほぼ同じように実装されます。 LabVIEW環境を起動します。 2つのウィンドウが前面に表示されます。1つ目はユーザーインターフェイス(仮想デバイスの外観)を実装するように設計されたフロントパネル、2つ目はプログラムロジックを実装するブロック図です。

図8-LabVIEW環境ウィンドウ
ブロック図ウィンドウを使用します。 次の手順を実行します。
- ブロックダイアグラムウィンドウで、右クリックしてコンテキストメニューを呼び出し、
- 表示されるウィンドウで、図のようにタブに移動し、[文字列定数]を選択します。
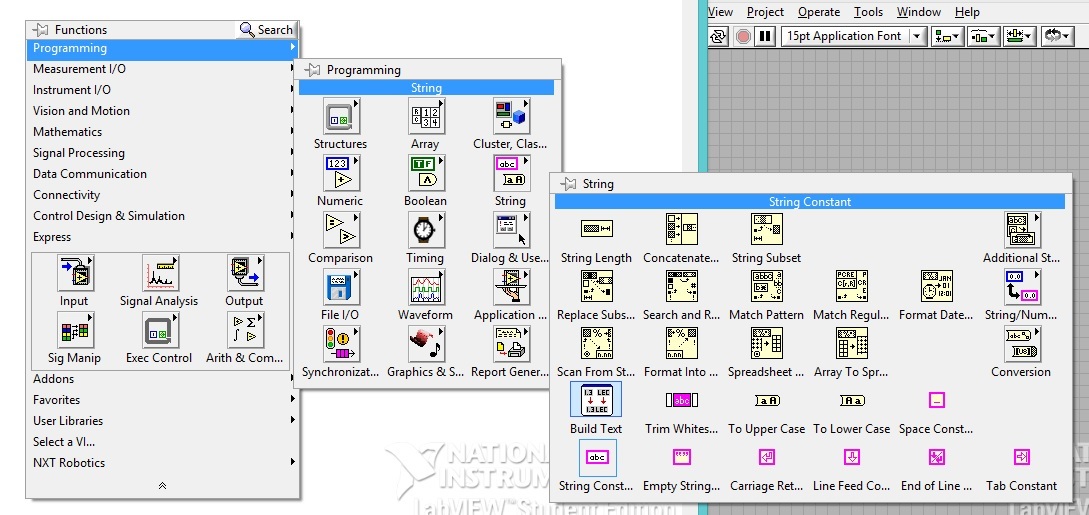
図9-コンテキストメニュー
- このブロックを配置して「Hello、World!」と入力し、
- 同様に、One Button Dialogブロックを選択し、
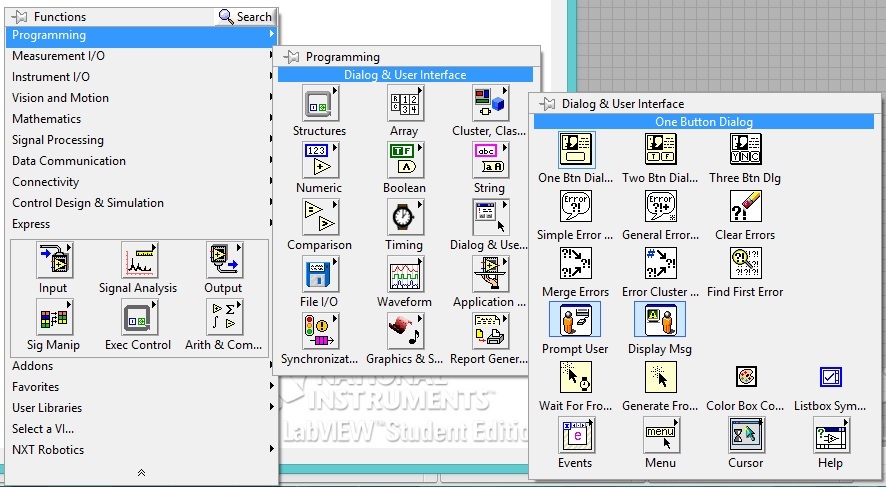
図10-1つのボタンダイアログブロック
- 図に示すようにブロックを接続し、
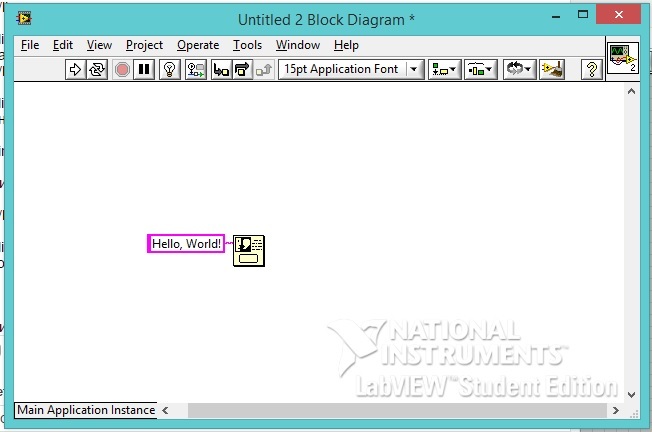
図11-完成した図
- タスクバーの水平矢印の形のボタンをクリックしてプログラムを実行し、
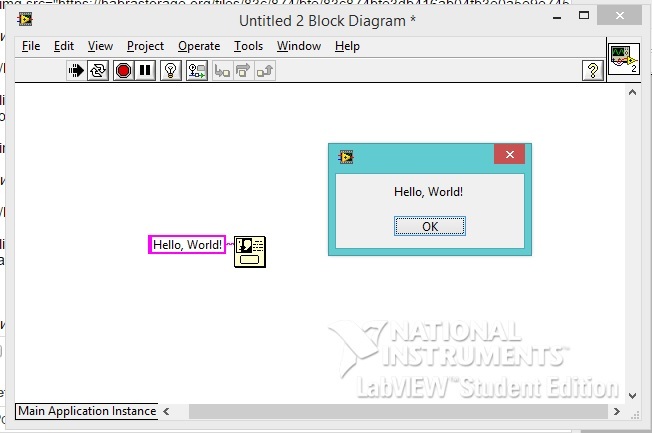
図12-プログラムの結果
まとめ
- NXTマイコンアプリケーションを開発するためのソフトウェアプラットフォームを確認しました。
- MRDS 4およびNI LabVIEWプラットフォームでのアプリケーション開発の基本原則を検討しました。
- 環境のインターフェイスに精通しました。
次の記事では、NXTプログラミングを直接扱います。 LabVIEWネットワーク環境には多くのトレーニング資料がありますが、VPLにはほとんどありません。 両方のプラットフォームのリファレンスガイドを学習することを強くお勧めします(英語の知識が必要です)。これらのマニュアルには、NXTを使用せずに実装できる多くの例と、次の書籍があります。
- LabVIEWでNXTマイコンをプログラミングします-Lidia Beliovskaya、Alexander Beliovsky、
- Microsoft Robotics Developer Studio。 ロボット制御アルゴリズムのプログラミング-Vasily Gai。
私の記事では、自分のプロジェクトのみを説明します。なぜなら、 あるソースから別のソースに情報を書き換える理由はありません。 私は建設的な批判を受け入れ、議論されたプラットフォームに関する質問に答えます。 事前に感謝します!