はじめに
遠心圧縮機での動的なガス圧縮は、ガス流のポリトロープ圧を増加させることにより達成されます。 このようなプロセスは、コンプレッサーの動作点を示す曲線の2次元グラフに表示されるコンプレッサーの気体力学特性によって記述されます。

設計点(点A)に近いコンプレッサーの動作モードでは、ガスの流れは流れ部分の要素の形状と一致します。 レジームの大幅な逸脱により、フローにさまざまな二次的な流れが生じ、複雑な物理プロセスが生じます。
サージラインの交点(ポイントB)には、最大から負への流れの急激な変化(流れの反転)を伴う高周波振動が伴います。
POMPAJは、ネットワークの蓄積特性に応じて、0.5から2.0 Hzのオーダーの圧力および流量変動の周波数を持つ、圧縮機の非定常、自励発振モードです。
サージは、ガス温度の急激な上昇、強い衝撃と振動の出現を伴い、コンプレッサーの破壊につながる可能性があります。 サージは、コンプレッサーにとって受け入れがたい現象です。
急増から身を守るには?
圧縮機ユニットの最新の制御システムには、圧縮機を急上昇現象から保護するためのさまざまなアルゴリズムがあります。 コンプレッサーユニットの制御システムに組み込まれた空気圧縮中に発生するプロセスを説明する数学的モデルにより、コンプレッサーユニット(コンプレッサーユニット)のサージ曲線に従ってアクチュエーターを制御し、コンプレッサーユニットの機械部分に影響を与えることなく、運用コストを削減できます。 動作中、KUの機械的特性は変化しません。 マット モデルは、制御ユニットの新しい特性に適応する可能性がありますが、実装は困難です。 したがって、試運転の段階でマットを構成します。 特定のKUのモデル。 ただし、サージング現象または定常状態のサージングの開始の検出は、使用されるKU制御システムとは無関係に行われます。 したがって、このタイプの緊急停止KUは、すべてのACS(自動制御システム)KUに存在します。 サージ現象を検出するには、多くの入力データが使用されます。出口圧力、温度などの変化です。
サージ検出器KU
この記事では、
KU K-250を検討してください。
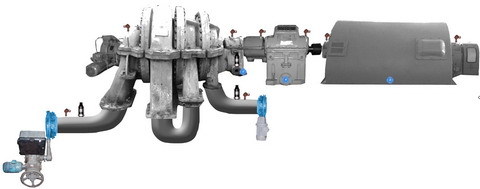
ガスクーラーへの中間タップを備えた遠心多段圧縮機。
動作モードでは、KUが定格特性に達すると、モーターが電力マージンなしで選択された場合、ステーター電流はほぼ公称値になります。 サージング現象の間、出口圧力はこのタイプのKUで可能な最大値まで上昇し、その後、圧縮空気は圧力の影響下でより高い段階からより低い段階に流れます。 オーバーフローの瞬間に、モーターシャフトの負荷が急激に減少し、機械的ショックが発生します。 この瞬間は、コントロールユニットの機械的損傷を防ぐために、早い段階で検出する必要があります。 これらのサージ現象が発生する理由は、この記事の範囲外です。
動作モードでの固定子電流のグラフを検討してください。

サージの間、圧縮空気が上段から下段に流れると、電動機が「押され」、この瞬間に電流が上昇し、負荷の減少により電流が低下し、動作電流が設定され、圧縮が続き、サイクルが続きますサージが消えるまで繰り返します。 そのような体制のスケジュール。

このグラフでは、1ヘルツの周波数で変動が発生しています。 固定子電流のこの動作は、始まったサージKUの直接的な結果です。 プログラムで検出する方法は?
サージ保護のソフトウェア実装
動作モードでは、電流はスムーズに小さな制限内で変化します。 サージの開始時またはすでに発生したとき、振動の振幅と周波数は大きくなります。 これは、従来のデジタルローパスフィルターを意味し、この緊急事態を検出できます。
たとえば、100ミリ秒に1回、フィルター関数を呼び出します。その式は次のとおりです。

ここで、0 <A <1フィルター係数。 Aが小さいほど、フィルターは弱くなります。
そのようなフィルターのグラフを見てみましょう。

さて、急増し始めたら、フィルターの動作を確認します。

グラフは、サージモードで電流がフィルタを数回通過することを示していますが、このような検出器は動作モードで誤検知を起こします。 したがって、サージの振幅に対応する値だけ、フィルタリングされた信号を上下にシフトする必要があります。 たとえば、両方向で5 Aです。

動作モードは通常の動作モードを示す範囲内にあり、サージングはすでに国境を越えています。7-8交差点でサージングを安全に検出し、誤ってコントロールユニットを切断できます。 さらに先へ進み、最初の交差点で、スロットルとサージバルブのアクチュエータを制御してサージ状態の停止を試みてください。
例としてSiemens S7-300 PLCを使用して、この機能を説明します。
このアーカイブ
サージ保護の動作を示すビデオ、以下を参照してください。
サージの境界に沿ってKUを深く調整するためのソフトウェアの実装に加えて、KUですでにサージを開始または開始する緊急テストを行う必要があります。