
2015年5月18日にリリースされた nanoCAD Plus 7では、nanoCADプラットフォームの範囲と位置を大幅に拡張する多くの機能が登場しました。 私たちは読者にこれらの機能を深く掘り下げ、それらが持つ機会と実際にどのように応用できるかを検討する多くの技術記事を提供します。 この記事は、 ポイントクラウドという一般名で統一された一連の機能について説明します。
はじめに
 点群とは何ですか? これは、実世界のオブジェクトの3Dスキャンの結果として取得され、このオブジェクトの表面を表す3次元空間内のポイントのセットです。 3Dスキャンは、専用のデバイス(3Dスキャナー)によって実装されます。3Dスキャナーは、スキャンされたオブジェクトの表面上の多数のポイントを自動的に測定し、出力にポイントクラウドを作成します(図1)。 3Dスキャナーからの出力には、3Dスキャナーのタイプに応じて、XYZ座標とメタデータが含まれます。 メタデータは、ポイントの座標を測定するプロセスの副産物である特定のデータを指します。 たとえば、アクティブな非接触スキャナーの場合、反射信号の強度、反射回数、ポイントの固定時間、表面の色などがあります。 データの量と品質は、使用する3Dスキャナーによって異なります。 ポイントクラウドのストレージと処理は、追加のカスタムメタデータ(属性)をもたらします。ポイントクラス(コード)、非ローカルの幾何学的特性(擬似正規、トポロジインジケーター)などです。
点群とは何ですか? これは、実世界のオブジェクトの3Dスキャンの結果として取得され、このオブジェクトの表面を表す3次元空間内のポイントのセットです。 3Dスキャンは、専用のデバイス(3Dスキャナー)によって実装されます。3Dスキャナーは、スキャンされたオブジェクトの表面上の多数のポイントを自動的に測定し、出力にポイントクラウドを作成します(図1)。 3Dスキャナーからの出力には、3Dスキャナーのタイプに応じて、XYZ座標とメタデータが含まれます。 メタデータは、ポイントの座標を測定するプロセスの副産物である特定のデータを指します。 たとえば、アクティブな非接触スキャナーの場合、反射信号の強度、反射回数、ポイントの固定時間、表面の色などがあります。 データの量と品質は、使用する3Dスキャナーによって異なります。 ポイントクラウドのストレージと処理は、追加のカスタムメタデータ(属性)をもたらします。ポイントクラス(コード)、非ローカルの幾何学的特性(擬似正規、トポロジインジケーター)などです。
図 1.オブジェクトの3Dスキャンの結果として点群が取得されます
N. Pelevinの記事「 どのような種類の3Dスキャナーが存在しますか?」 」
クラウドの品質は、3Dスキャナーの品質、解像度、精度、スキャン速度に直接依存します。 深刻なタスクには深刻なデバイスが必要であることは明らかですが、今日では、Microsoft XBOXゲームコンソールの人気のKinectセンサーでさえクラウドソースとして機能します。 テクノロジーは日々利用しやすくなっています-これは点群への関心を説明しています。
なぜ必要ないのですか? まず、ポイントクラウドは、関心のある実世界のオブジェクトの迅速な視覚化を提供します。 しかし、もちろん、これらはこのエリアだけに限定されません-点群は、変更と制御、3D印刷、到達困難な場所または大きな拡張オブジェクトの仮想化、3次元および数学モデルの作成、パターン認識、自動分析、再構築および操作に使用されます。 間違いなく、ポイントクラウドはコンピューター支援設計システムに多くの有用性をもたらします。この記事ではいくつかの領域について説明します。自分で何かを思いつくかもしれません。3次元のポイントクラウドの可能性はまだ完全には明らかにされていません。テクノロジーは、問題を解決するための優れたツールとなります。
nanoCAD Plusの点群
そのため、バージョン7.0以降、点群のサポートが国内のCADプラットフォームnanoCAD Plusに登場しました。 特に、ソフトウェア製品には追加のメニューセクションが追加されました。このセクションには、ポイントクラウドのインポートと表示の機能が組み合わされています(図2)。 最初の項目はインポート機能です。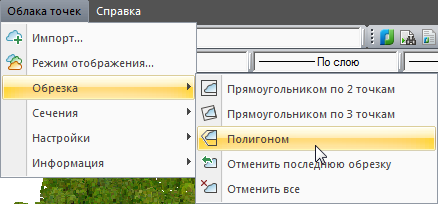
図 2.点群を操作するためにnanoCAD Plus 7.0に登場した一連のコマンド
サポートされている形式
始めるために、nanoCAD Plus 7.0がサポートする形式を把握しましょう。 インポートコマンドは、BIN(TerraSolid)、LAS(ASPRS)、PTX(Leica)、PTS(Leica)、PCD(Point Cloud Library)の5つの一般的な形式のポイントクラウドをダウンロードする機能を提供します。 独自の直接インポートモジュールを使用すると、ソースファイルから最大限の情報を保存できます。このような旅行は作業をより便利にするだけではありません-インポートプロセス中に、ユーザーはポイントクラウドに関する一般情報を取得し、インポートされたメタデータをフィルター処理し、ポイントをクラス(コード)、リフレクションなどで事前分類できます。 したがって、データはすでにより秩序正しくCADに到着しています(図3)。
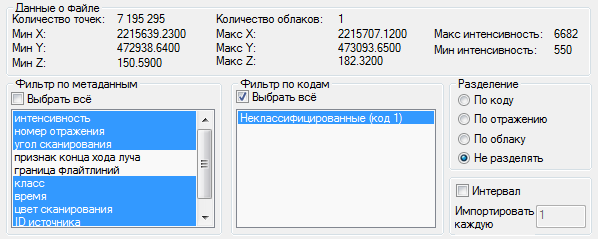
図 3. 3Dスキャナーが動作する一般的な形式の直接サポートにより、CADの点群インポート設定を制御できます。
点群のバインドおよび表示設定に関する情報は、* .dwgファイルに保存されます。
将来、ビットマップ画像用のnanoCAD Plusの以前のバージョンで行われていたように、ユーザーは* .dwgファイル内にクラウドを保存できるようになります。 この機能により、プロジェクトをサードパーティの請負業者と顧客に転送する際にデータを失うリスクが軽減されます。
nanoCAD Plusがサポートする3Dスキャンボリューム
クラウド内のポイントの数は、3Dスキャナーの解像度に依存します。 300万から400万ポイントの雲は非常に一般的と考えられています。 特大のクラウドには10億以上のポイントが含まれています。このような大量のデータを処理するには、十分に強力なコンピューターと専用のアルゴリズムが必要です。NanoCAD Plus 7.0は、ポイントクラウドのボリュームに技術的な制限を設けておらず、アルゴリズム自体は超大型アレイの処理に最適化されています-図を参照してください。 図4は、大きなポイントクラウドの使用例を示しています(サンプルワークショップファイル(129百万ポイント)は、ライカスキャナーを使用して取得され、この会社の代表者から提供されました)。

図 4. nanoCAD Plus 7.0を使用すると、10億ポイント以上の寸法を持つ超大規模な雲を操作できます。
点群ディスプレイ
nanoCAD Plusでは、インポートされた点群の表示をカスタマイズできます-これは表示モードコマンドが担当します。 ここで、雲の色の種類とポイントのサイズを設定できます。スキャンの色で色付けされたポイントクラウドは非常に効果的に表示されます(図5)。 実際、スキャンしたオブジェクトの3次元写真を取得し、それらを歩き回って既存の3Dモデルに埋め込んだり、あらゆる点でクラウドのポイントへのバインドを使用したりすることもできます。 この機能は、nanoCAD Plusにロードされた垂直アプリケーションに対して開かれていることに注意してください。 また、このようなアプリケーションの開発者は、広範なソフトウェアインターフェイスを使用して、クラウドポイントとそのパラメーターに関する情報にアクセスできます。
図 5.雲は、ポイントのメタデータに従って色を付けることができます。色、高さ、強度、スキャン角度などをスキャンします。
nanoCAD Plus 7.0をインストールしている場合は、ポイントクラウド内を自由に移動できます。examplesフォルダーには、* .dwg形式でフィルタリング機器を備えたシンプルなモデルが含まれています。 パースペクティブナビゲーションモードでモデルの周りを歩いて、彼女の色、ドットの太さを変えてみてください。 同じフォルダに、3次元のポイントプロジェクトの他の例があります。
点群運用
視覚化以外に点群で何ができるのでしょうか? 理論化すると、有用な関数の数は膨大になります:モデルを比較し、衝突を判断し、特定の基準(メタデータなど)に従ってオブジェクトを分離し、さまざまな記号に従ってポイントのグループを分類し、これらまたは追加の記号に従って点群をステッチカットし、サーフェスを認識できますおよびオブジェクト...ただし、これらのタスクはすべて、特定の分野に特化した高度に専門化されたソリューションの機能です。 nanoCAD Plus 7.0では、点群を操作するための一連のツールはやや控えめで、大量使用向けに設計されています。 特に、このプラットフォームでは以下を実行できます。
- 長方形またはポリゴンで点群をトリミングします。 これにより、ユーザーが現在作業しているクラウドのサイズを縮小し、作業に必要なモデルをポイントクラウドから分離できます。
- 点群に沿って垂直または水平断面をプロットします。 たとえば、この関数を使用すると、建物の一部または地球の表面を取得できます(図6)。
- 点群の断面に沿った最も近い断面点と幾何学的構造にスナップします。
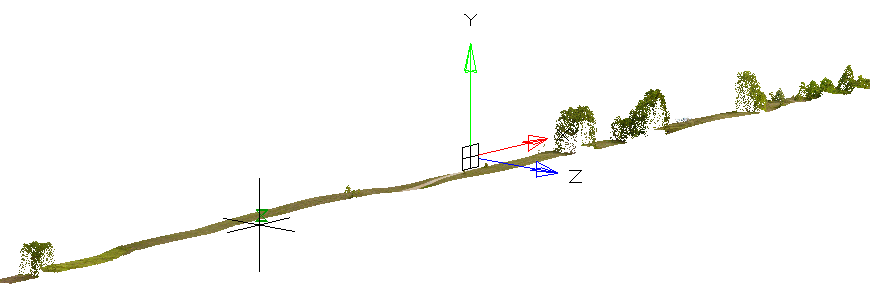
図 6. nanoCAD Plus 7.0の点群上に構築されたセクション
これらのツールにはどのような実用的なアプリケーションがありますか? セクションとクリップの機能を使用する方法の1つは、ポイントクラウドをセグメント化して、空間の他の部分の影響を排除して、空間のターゲットエリアとの便利な作業を整理することです。 これに加えて、ポイントクラウドスナップ機能を使用すると、測定、3次元オブジェクトのトレース、さらには3次元モデリングまで、ポイントに効果的に依存できます。 クラウドのポイントにアタッチすることにより、すべての通常のnanoCADチームの機能を使用して、距離と長さ、周囲と面積を測定できます。
点群のセクション内の3次元オブジェクトの投影をトレースするには、nanoCADの幅広い描画ツールを使用しますが、点群のジオメトリを使用した3次元構築では、 新しい3Dモデリングモジュールのすべての機能が利用できます。
点群の例
点群から取得したデータに追加のアルゴリズムを適用することにより、よりインテリジェントなタスクを解決できます。 たとえば、ベニスの建物のファサードをデジタル化し(RIEGL VMX-250モバイルレーザースキャンシステムを使用)、変形の結果と破壊者の影響についてファサードをさらに分析するビデオを次に示します。ヴェネツィアの建物ファサードの自動分析にポイントクラウドを使用する例
そして、これはRIEGL VZ-4000スキャナーを使用してグランドキャニオン(米国)をデジタル化する例です。3次元モデルの作成方法をご覧ください。
グランドキャニオンの3次元モデルを作成する例の実用的なスキャン
3次元スキャンを使用すると、到達しにくいオブジェクト(廃坑など)のモデルを記述することができます。
廃坑の3次元モデルを作成する例
さらに、インターネット上には、ポイントクラウドテクノロジーのオリジナルアプリケーションの他の多くの例があります。 ソフトウェアとハードウェアの開発により、これらすべての問題の解決が可能になりました。
おわりに
以下は、nanoCAD Plusプラットフォームに実装されている興味深い技術です。 誰かが言うのは、3Dスキャンの方向性は広告の性質に近いということです。 私は部分的に同意します-この技術はまだ開発および改善することができます。 実際、これはまさに私たちが求めているものです。3次元スキャン、パターン認識、インテリジェントなデータ処理の技術が求められている実用的なタスクを見つけましょう。 協力する準備ができました。また、ポイントクラウドのアップロード、セクションの構築、測定の実行、3次元オブジェクトのトレースが可能になりました。 この機能はnanoCAD Plusで利用でき、デモモードで試すことができます。 したがって、スターターツールキットがあります。 良いプロジェクト!