ゲームエンジンのマルチスレッドアーキテクチャの実装の機能を検討してください。
1.はじめに
1.1。 復習
ゲームエンジンのマルチスレッドアーキテクチャにより、すべてのプラットフォームプロセッサの機能を最大限に活用できます。 使用可能なすべてのプロセッサーでさまざまな機能ブロックを並列実行します。 ただし、このようなスキームの実装はそれほど単純ではないことがわかります。 ゲームエンジンの個々の要素はしばしば相互に作用し、同時に実行されるとエラーが発生する可能性があります。 このようなシナリオを処理するために、エンジンはロックの可能性を排除する特別なデータ同期メカニズムを提供します。 また、同時データ同期のメソッドも実装しているため、実行時間を最小限に抑えることができます。
提示された資料を理解するには、コンピューターゲームの最新の作成方法、ゲームエンジンのマルチスレッドのサポート、または一般的なアプリケーションパフォーマンスの向上に精通する必要があります。
2.並列実行の状態
並列実行状態は、マルチスレッドの重要な概念です。 ゲームエンジンを個別のモードに分割し、それぞれが独自のモードで動作し、実質的にエンジンの他の部分と相互作用しないことによってのみ、並列計算の最大の効率を達成し、同期に必要な時間を短縮できます。 すべての共通リソースを除外して、エンジンの個々の部分を完全に分離することはできません。 ただし、位置または方向データの取得などの操作では、個々のシステムは共有リソースではなくデータのローカルコピーを使用する場合があります。 これにより、エンジンのさまざまな部分のデータ依存性を最小限に抑えることができます。 別のシステムによって行われた一般データの変更に関する通知は、状態マネージャーに送信され、状態マネージャーはそれらをキューに入れます。 これはメッセージングモードと呼ばれます。 このモードは、タスクの完了時に、エンジンシステムが変更の通知を受信し、それに応じて内部データを更新することを前提としています。 このようなメカニズムにより、同期時間とシステムの相互依存性を大幅に削減できます。
2.1ステータス
実行状態マネージャーが効率的に動作するためには、特定のクロックで操作を同期することをお勧めします。 これにより、すべてのシステムが同時に機能します。 ただし、クロック周波数はフレームレートに対応する必要はありません。 また、クロックの持続時間は周波数に依存しない場合があります。 1つのクロックサイクルが1つのフレームの送信に必要な時間に対応するように選択できます(サイズに関係なく)。 言い換えれば、サイクルの頻度または期間は、状態マネージャーの特定の実装によって決定されます。 図1は、「無料」の段階的な操作モードを示しています。このモードでは、すべてのシステムが同じクロックサイクルで操作を完了する必要はありません。 すべてのシステムが単一サイクルで操作を完了するモードは、「ハード」ステップバイステップモードと呼ばれます。 図2に概略を示します。

図1.フリー増分モードでの実行ステータス
2.1.1。 ステップバイステップモード
無料のステップバイステップモードでは、すべてのシステムが、次の計算バッチを完了するために必要な所定の期間連続して動作します。 ただし、「無料」という名前をそのまま使用することはできません。システムは常に同期されておらず、次のステージに必要なクロックサイクル数の選択においてのみ「無料」です。
原則として、このモードでは、状態の変更に関する簡単な通知を状態マネージャーに送信するだけでは不十分です。 更新されたデータを送信することも必要です。 これは、共有データを変更したシステムが進行中であり、このデータを待っている他のシステムが更新を実行する準備ができているためです。 この場合、より多くのデータのコピーを作成する必要があるため、より多くのメモリが必要です。 したがって、「無料」体制はあらゆる場合に普遍的な解決策とは見なされません。
2.1.2。 ハードステップバイステップモード
このモードでは、すべてのシステムのタスクの実行が1ステップで完了します。 このようなメカニズムは実装が簡単で、更新されたデータを通知とともに送信する必要がありません。 実際、必要に応じて、1つのシステムは別のシステムに新しい値を要求するだけです(もちろん、実行サイクルの最後に)。
ハードモードでは、擬似フリーの段階的な操作モードを実装して、さまざまなステップ間で計算を分散できます。 特に、これは、最初の「共通目標」が最初のクロックサイクルで計算されるAI計算で必要になる場合があり、次のステップで徐々に改善されます。

図2.ハード増分モードでの実行ステータス
2.2。 データ同期
複数のシステムで共有データを変更すると、変更の競合が発生する可能性があります。 この場合、メッセージングシステムは、正しい合計値を選択するためのアルゴリズムを提供する必要があります。 以下の基準に基づいた2つの主なアプローチがあります。
- 時間:最終的な変更が最終的な値になります。
- 優先度:最終値は、最高の優先度を持つシステムによって行われた変更です。 システムの優先度が同じ場合、変更の時間も考慮することができます。
(基準のいずれかによる)すべての古いデータは、単純に上書きするか、通知キューから除外できます。
最終値は、変更が行われる順序に依存する可能性があるため、合計データの相対値を使用することは非常に困難です。 そのような場合、絶対値を使用する必要があります。 次に、ローカルデータを更新するときに、システムは古い値を新しい値に簡単に置き換えることができます。 最善の解決策は、特定の状況に応じて絶対値または相対値を選択することです。 たとえば、位置や方向などの一般データには絶対値が必要です。これは、変更の順序が重要だからです。 パーティクルに関するすべての情報はその中にのみ保存されるため、たとえば、パーティクル生成システムには相対値を使用できます。
3.エンジン
エンジンを開発するとき、機能をさらに拡張するために必要な柔軟性に焦点が当てられています。 これにより、特定の制限条件(メモリなど)で使用するために最適化されます。
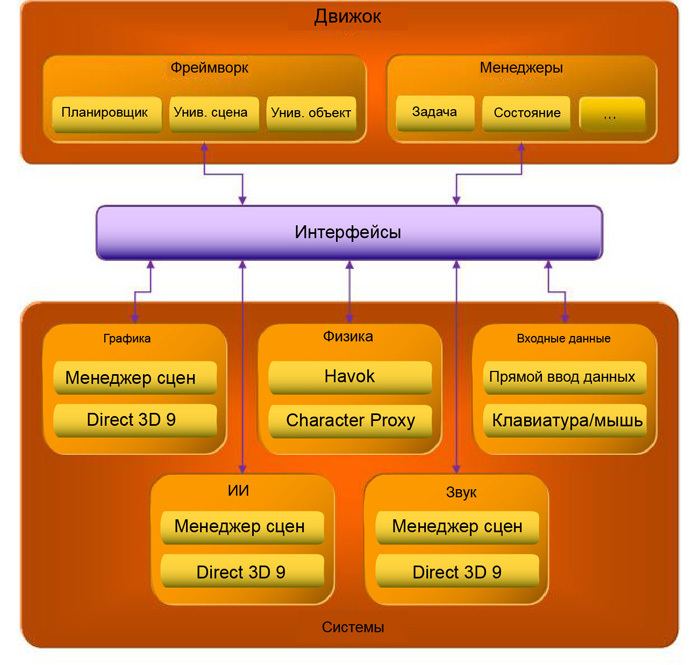
エンジンは、フレームワークとマネージャーの2つの部分に条件付きで分割できます。 フレームワーク(セクション3.1を参照)には、実行中に複製されるゲームの一部が含まれます。つまり、いくつかのコピーで存在します。 また、ゲームのメインサイクルの実装に関係する要素も含まれます。 マネージャー(セクション3.2を参照)は、ゲームの論理コンポーネントの実行を担当するシングルトンオブジェクトです。
以下は、ゲームエンジンの図です。
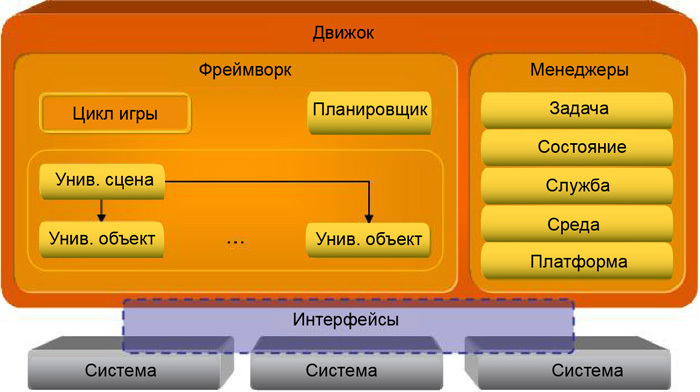
図3.一般的なエンジンアーキテクチャ
機能的なゲームモジュールまたはシステムはエンジンの一部ではないことに注意してください。 エンジンはそれらを結合するだけで、接続要素として機能します。 このようなモジュール構成により、必要に応じてシステムをロードおよびアンロードすることができます。
エンジンとシステムの相互作用は、インターフェースを使用して実行されます。 これらは、エンジンにシステムの機能およびシステムの機能へのアクセスを提供するように実装されます-エンジンの管理者に。
エンジンの詳細図は、付録A「エンジン図」に示されています。
実際、すべてのシステムは互いに独立しています(セクション2「同時実行の状態」を参照)。つまり、他のシステムの動作に影響を与えることなく、並行してアクションを実行できます。 ただし、システムが相互にやり取りする必要があるため、データの変更には特定の困難が伴います。 システム間の情報交換は、次の場合に必要です。
- 共有データ(たとえば、オブジェクトの位置または方向)の変更について別のシステムに通知するため。
- このシステムでは利用できない機能を実行します(たとえば、AIシステムは、オブジェクトの幾何学的または物理的特性を計算して光線交差テストを実行するシステムを指します)。
前者の場合、前のセクションで説明した状態マネージャーを使用して、情報交換を管理できます。 (状態マネージャーの詳細については、セクション3.2.2「状態マネージャー」を参照してください。)
2番目のケースでは、あるシステムのサービスを提供して別のシステムを使用できるようにする特別なメカニズムを実装する必要があります。 このメカニズムの詳細については、3.2.3項「サービスマネージャ」を参照してください。
3.1。 枠組み
フレームワークは、エンジンのすべての要素を結合するために使用されます。 インスタンスがグローバルに作成されるマネージャーを除き、エンジンを初期化します。 シーン情報も保存します。 柔軟性を高めるために、シーンは、ユニバーサルオブジェクトを含む、いわゆるユニバーサルシーンとして実装されます。 これらは、シーンのさまざまな機能部分を結合するコンテナです。 詳細については、セクション3.1.2を参照してください。
メインのゲームサイクルもフレームワークに実装されています。 概略的には、次のように表すことができます。
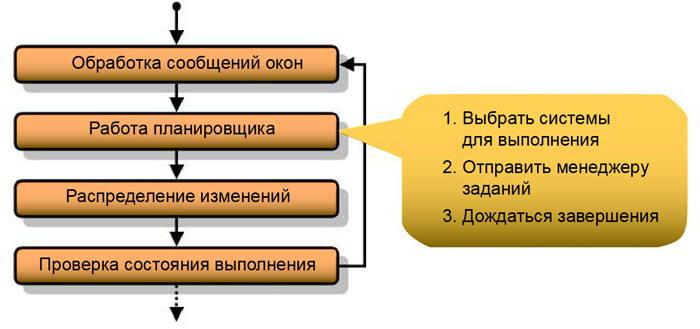
図4.メインのゲームループ
エンジンはウィンドウ環境で動作するため、ゲームサイクルの最初のステップでは、OSウィンドウのすべての不完全なメッセージを処理する必要があります。 これが行われない場合、エンジンはOSメッセージに応答しません。 2番目のステップでは、スケジューラーはタスクマネージャーを使用してタスクを割り当てます。 このプロセスについては、以下のセクション3.1.1で詳しく説明します。 その後、状態マネージャー(セクション3.2.2を参照)は、エンジンシステムに加えられた変更に関する情報を送信します。 最後のステップでは、実行ステータスに応じて、フレームワークは、たとえば次のシーンに移動するためにエンジンを完了するか続行するかを決定します。 エンジンの状態に関する情報は、環境マネージャーに保存されます。 詳細については、セクション3.2.4を参照してください。
3.1.1。 プランナー
スケジューラは、所定の周波数で基準実行クロックを生成します。 ベンチマークモードで、測定の終了を待たずに、前の操作が完了した直後に次の操作を開始する必要がある場合、頻度は無制限にできます。
クロックにより、スケジューラは、タスクマネージャを使用して、システムを実行モードにします。 無料のステップバイステップモード(セクション2.1.1)では、スケジューラはシステムをポーリングして、タスクを完了するのに必要なクロックサイクル数を決定します。 調査の結果に基づいて、スケジューラは、実行の準備ができているシステムと特定のビートで作業を完了するシステムを決定します。 システムの完了にさらに時間が必要な場合、スケジューラはメジャーの数を変更できます。 ハードステップバイステップモード(セクション2.1.2)では、すべてのシステムが同じクロックサイクルで実行を開始および終了するため、スケジューラはすべてのシステムが実行を完了するまで待機します。
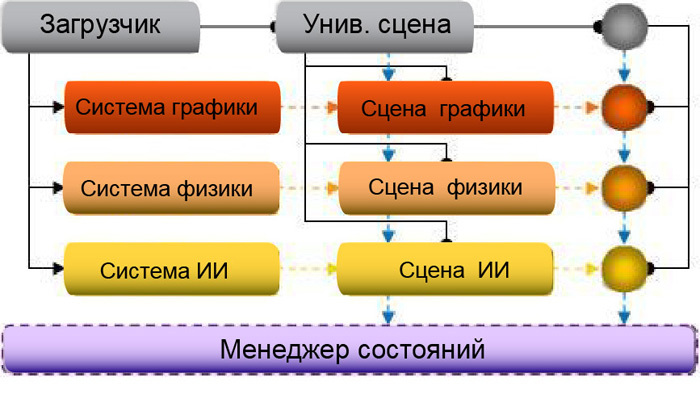
3.1.2。 普遍的なシーンとオブジェクト
ユニバーサルシーンとオブジェクトは、他のシステムに実装された機能のコンテナです。 これらは、エンジンとの対話のみを目的としており、他の機能は実行しません。 ただし、他のシステムで使用可能な機能を利用するために拡張できます。 これにより、弱い結合が可能になります。 実際、普遍的なシーンとオブジェクトは、他のシステムのプロパティをそれらに縛られることなく使用できます。 このプロパティにより、システムの相互依存性がなくなり、システムが同時に動作できるようになります。
以下の図は、普遍的なシーンとオブジェクトの拡張を示しています。
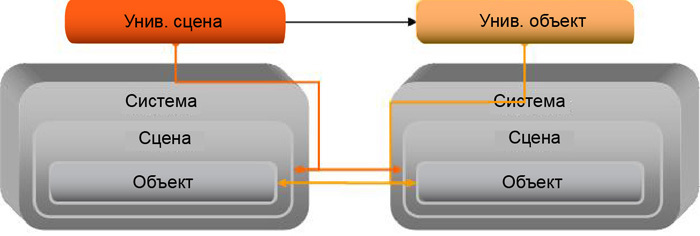
図5.ユニバーサルシーンとオブジェクトの拡張
次の例を使用して、拡張の原則を検討してください。 ユニバーサルユニバーサルシーン拡張が実行され、シーンがグラフィック、物理、およびその他のプロパティを使用するように拡張されるとします。 この場合、拡張の「グラフィック」部分がディスプレイの初期化を担当し、「物理」部分が重力などの固体の物理法則の実装を担当します。 シーンにはオブジェクトが含まれているため、ユニバーサルシーンには複数のユニバーサルオブジェクトも含まれます。 汎用オブジェクトも展開でき、グラフィック、物理、その他のプロパティを使用するように展開できます。 たとえば、画面上にオブジェクトを描画するには、グラフィック拡張機能と、ソリッドと物理的なものとの相互作用の計算が実装されます。
エンジンとシステムの相互作用の詳細図は、付録B「エンジンとシステムの相互作用のスキーム」に記載されています。
ユニバーサルシーンとユニバーサルオブジェクトは、すべての「拡張機能」を状態マネージャーに登録する役割を果たし、すべての拡張機能が他の拡張機能(つまり、他のシステム)によって行われた変更の通知を受信できることに注意してください。 例は、物理的な拡張機能によって行われた位置と方向の変更の通知を受信するために登録されたグラフィック拡張機能です。
システムコンポーネントの詳細については、セクション5.2「システムコンポーネント」を参照してください。
3.2。 マネージャー
マネージャーがエンジンを管理します。 これらはシングルトンオブジェクトです。つまり、各タイプのマネージャーは1つのインスタンスでのみ使用できます。 これが必要なのは、マネージャーリソースの重複が不可避的に冗長性をもたらし、生産性に悪影響を与えるためです。 さらに、マネージャーはすべてのシステムに共通の機能を実装する責任があります。
3.2.1。 タスクマネージャー
タスクマネージャーは、スレッドプール内のシステムタスクを管理します。 最適なn倍スケーリングを確保し、不要なスレッドの割り当てを防ぎ、オペレーティングシステムでのタスクの切り替えの不当なコストを排除するために、スレッドプールはプロセッサごとに1つのスレッドを作成します。
スケジューラーは、実行するタスクのリストと、待機する必要のあるタスクの完了に関する情報をタスクマネージャーに送信します。 彼はさまざまなシステムからこのデータを受け取ります。 各システムは、実行するタスクを1つだけ受け取ります。 この方法は、機能分解と呼ばれます。 ただし、データ処理の場合、このような各タスクは、任意の数のサブタスクに分割できます(データ分解)。
以下は、クアッドコアシステムのスレッド間のタスクの分散の例です。

図6.タスクマネージャーが使用するスレッドプールの例
タスクマネージャーは、メインタスクへのアクセスに対するスケジューラーのリクエストを処理することに加えて、初期化モードで作業できます。 動作に必要なローカルデータストアを初期化できるように、各スレッドからシステムを順次ポーリングします。
タスクマネージャを実装するためのヒントは、付録D「タスクを実装するためのヒント」に記載されています。
3.2.2。 状態マネージャー
状態マネージャーはメッセージングエンジンの一部です。 変更を追跡し、これらの変更が影響する可能性があるすべてのシステムに変更に関する通知を送信します。 不要な通知を送信しないように、状態マネージャーは特定のケースで通知するシステムに関する情報を保存します。 このメカニズムは、Observerパターンに基づいて実装されています(付録C「Observer(設計パターン)」を参照)。 つまり、このテンプレートには、サブジェクトの変更を監視する「オブザーバー」の使用が含まれますが、変更コントローラーはそれらの間の仲介者の役割を実行します。
このメカニズムは次のように機能します。 1.オブザーバーは、変更コントローラー(または状態マネージャー)に、サブジェクトをモニターする変更を通知します。 2.サブジェクトは、すべての変更をコントローラーに通知します。 3.フレームワーク信号に基づいて、コントローラーは被験者の変化についてオブザーバーに通知します。 4.オブザーバーは、サブジェクトに更新データの要求を送信します。
無料の段階的な実行モード(セクション2.1.1を参照)では、このメカニズムの実装はやや複雑です。 最初に、変更の通知とともに更新されたデータを送信する必要があります。 このモードでは、オンデマンド送信は適用されません。 確かに、要求の受信時に、変更を担当するシステムがまだ実行を完了していない場合、更新されたデータを提供することはできません。 第二に、あるシステムがサイクルの終わりにまだ変更を受信する準備ができていない場合、状態マネージャーは、それらを受信するために登録されたすべてのシステムが準備完了状態になるまで変更されたデータを保持する必要があります。
フレームワークには、このための2つの状態マネージャーがあります。シーンレベルとオブジェクトレベルで変更を処理するためです。 通常、シーンとオブジェクトに関連するメッセージは互いに独立しているため、2つの別個のマネージャーを使用すると、不要なデータを処理する必要がなくなります。 ただし、シーン内のオブジェクトの状態を考慮する必要がある場合は、その変更に関する通知を受信するように登録できます。
不要な同期を実行しないように、状態マネージャーは、タスクマネージャーによって作成されたスレッドごとに変更通知のキューを個別に形成します。 したがって、キューにアクセスするとき、同期は必要ありません。 セクション2.2では、実行後にキューをマージするために使用できるメソッドについて説明します。
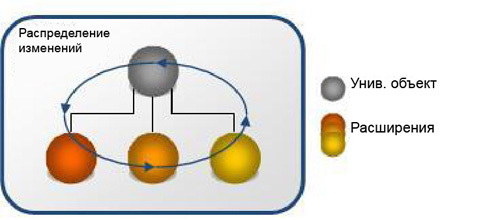
図7.ユニバーサルオブジェクトの内部変更の通知
変更の通知を順番に送信する必要はありません。 それらを並行して送信する方法があります。 タスクを実行すると、システムはそのすべてのオブジェクトで動作します。 たとえば、物理オブジェクトが相互作用するとき、物理システムはその動き、衝突の計算、新しい力などを制御します。通知が受信されると、システムオブジェクトはシステムの他のオブジェクトと相互作用しません。 関連付けられているユニバーサルオブジェクトの拡張機能と対話します。 これは、ユニバーサルオブジェクトが互いに独立し、同時に更新できることを意味します。 このアプローチは、同期プロセスで考慮する必要がある極端なケースを除外しません。 ただし、連続してしか実行できないと思われる場合は、並列実行モードを使用できます。
3.2.3。 サービスマネージャー
サービスマネージャは、他のシステムではアクセスできない他のシステムの機能へのアクセスをシステムに提供します。 関数は直接ではなく、インターフェースを介してアクセスされることを理解することが重要です。 システムインターフェイスに関する情報もサービスマネージャに保存されます。
システムの相互依存を排除するために、各システムには少数のサービスのみがあります。 また、特定のサービスを使用する能力は、システム自体ではなく、サービスマネージャーによって決定されます。
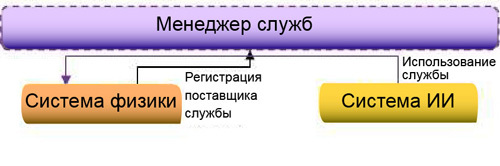
図8.サービスマネージャーの例
サービスマネージャには別の機能があります。 他のシステムのプロパティへのアクセスをシステムに提供します。 プロパティは、メッセージングシステムで送信されない特定のシステムの特定の値です。 これは、グラフィックスシステムの画面解像度の拡張、または物理システムの重力の大きさです。 サービスマネージャは、システムにそのようなデータへのアクセスを許可しますが、それらを直接制御することは許可しません。 プロパティの変更を特別なキューに配置し、順次実行後にのみ公開します。 別のシステムのプロパティへのアクセスが必要になることはめったにないため、悪用しないでください。 たとえば、コンソールウィンドウからグラフィックシステムのワイヤーフレームモードを有効または無効にしたり、ユーザーインターフェイスからプレーヤーの要求に応じて画面解像度を変更したりするために必要になる場合があります。 この機能は主に、フレームごとに変化しないパラメーターを設定するために使用されます。
3.2.4。 環境マネージャー
- 環境マネージャーは、エンジンのランタイム環境を提供します。 その機能は、条件付きで次のグループに分類できます。
- 変数:エンジンのすべての部分で使用される共通変数の名前と値。 通常、変数値は、シーンまたは特定のユーザー設定を読み込むときに決定されます。 エンジンとさまざまなシステムは、リクエストを送信することでそれらにアクセスできます。
- 実行:シーンまたはプログラムの完了などのパフォーマンスデータ。 これらのパラメータは、システム自体とエンジンの両方で設定および要求できます。
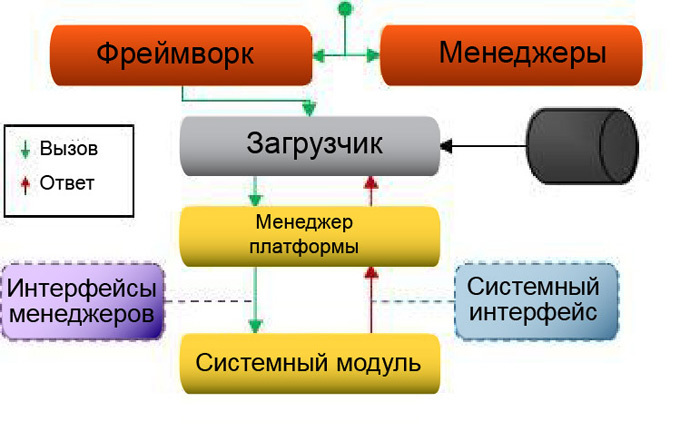
3.2.5。 プラットフォームマネージャー
プラットフォームマネージャーは、オペレーティングシステムコールの抽象化を実装し、単純な抽象化に加えて追加の機能も提供します。 このアプローチの利点は、1回の呼び出しでいくつかの典型的な機能をカプセル化できることです。 つまり、呼び出し元ごとに個別に実装する必要はなく、OS呼び出しに関する詳細でオーバーロードされます。
例として、動的システムライブラリをロードするためのプラットフォームマネージャーへの呼び出しを検討します。 システムをロードするだけでなく、関数のエントリポイントを受け取り、ライブラリ初期化関数を呼び出します。 マネージャは、ライブラリ記述子も保存し、エンジンの終了後にアンロードします。
プラットフォームマネージャーは、サポートされているSIMD命令などのプロセッサに関する情報を提供したり、プロセスの特定の動作モードを初期化したりします。 システムは他のクエリ生成関数を使用できません。
4.インターフェース
インターフェースは、フレームワーク、マネージャー、システム間の相互作用の手段です。 フレームワークとマネージャーはエンジンの一部であるため、互いに直接対話できます。 システムはエンジンには適用されません。 さらに、それらはすべて異なる機能を実行するため、単一の相互作用方法を作成する必要が生じます。 システムはマネージャと直接対話できないため、異なるアクセス方法を提供する必要があります。 ただし、すべてのマネージャー機能がシステムに対して開かれている必要はありません。 それらのいくつかは、フレームワークでのみ利用可能です。
インターフェイスは、標準のアクセス方法を使用するために必要な機能のセットを定義します。 これにより、フレームワークは特定のシステムの実装の詳細を知る必要がなくなります。これは、フレームワークが特定の呼び出しセットを介してのみ相互作用できるためです。
4.1。 サブジェクトとオブザーバーのインターフェイス
サブジェクトおよびオブザーバーインターフェイスの主な目的は、どのオブザーバーがどのサブジェクトに関する通知を送信するかを登録すること、およびそのような通知を送信することです。 オブザーバーとの登録および接続の切断は、インターフェイスの実装に含まれるすべてのエンティティの標準機能です。
4.2。 マネージャーインターフェイス
マネージャーはシングルトンオブジェクトですが、フレームワークに対してのみ直接アクセスできます。 他のシステムは、全体的な機能の一部のみを表すインターフェースを介してのみマネージャーにアクセスできます。 初期化後、インターフェースはシステムに転送され、システムはそれを使用して特定のマネージャー機能を操作します。
すべてのマネージャーに単一のインターフェースはありません。 それぞれに独自のインターフェイスがあります。
4.3。 システムインターフェース
フレームワークがシステムコンポーネントにアクセスするには、インターフェイスが必要です。 それらがなければ、新しい各エンジンシステムのサポートを個別に実装する必要があります。
各システムには4つのコンポーネントが含まれているため、4つのインターフェイスが必要です。 つまり、システム、シーン、オブジェクト、タスクです。 詳細については、セクション5「システム」を参照してください。 インターフェイスは、コンポーネントにアクセスする手段です。 システムインターフェイスを使用すると、シーンを作成および削除できます。 シーンインターフェースを使用すると、オブジェクトの作成と破棄、およびシステムのメインタスクに関する情報の要求が可能になります。 タスクインターフェイスは、主にタスクをスレッドプールに設定するときにタスクマネージャーによって使用されます。
シーンとオブジェクトは、システムの一部として、相互に、またユニバーサルシーンとそれらが接続されているオブジェクトと相互作用する必要があるため、それらのインターフェイスもサブジェクトとオブザーバーのインターフェイスに基づいて作成されます。
4.4。 インターフェイスを変更する
これらのインターフェースは、システム間でデータを転送するために使用されます。 特定のタイプの変更を行うすべてのシステムは、そのようなインターフェースを実装する必要があります。 例はジオメトリです。 ジオメトリインターフェイスには、要素の位置、方向、スケールを決定するためのメソッドが含まれています。 ジオメトリを変更するシステムは、変更されたデータへのアクセスに他のシステムに関する情報を必要としないようなインターフェースを実装する必要があります。
5.システム
システムはエンジンの一部であり、ゲーム機能の実装を担当します。 これらは、エンジンが意味をなさない基本的なタスクをすべて実行します。 エンジンとシステム間の相互作用は、インターフェースを使用して実行されます(セクション4.3「システムインターフェース」を参照)。 これは、さまざまなタイプのシステムに関する情報でエンジンを過負荷にしないために必要です。 インターフェースのおかげで、エンジンは実装の詳細をすべて考慮する必要がないため、新しいシステムを追加するプロセスははるかに簡単になります。
5.1。 種類
エンジンシステムは、ゲームの標準コンポーネントに対応するいくつかの定義済みカテゴリに分割できます。 例:ジオメトリ、グラフィックス、物理学(固体の衝突)、サウンド、入力処理、AIおよびアニメーション。
非標準機能を備えたシステムは、別のカテゴリに属します。 特定のカテゴリのデータを変更するシステムは、エンジンがそのような情報を提供しないため、このカテゴリのインターフェースについて知っておく必要があることを理解することが重要です。
5.2。 システムコンポーネント
システムごとに、いくつかのコンポーネントを実装する必要があります。 それらのいくつかを以下に示します。システム、シーン、オブジェクト、タスク。 これらのコンポーネントはすべて、エンジンのさまざまな部分と対話するために使用されます。
以下の図は、さまざまなコンポーネント間の相互作用を示しています。
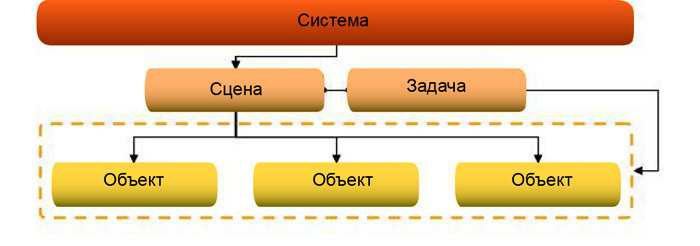
図9.システムコンポーネント
エンジンシステム間の関係の詳細図は、付録B「エンジンとシステムの相互作用スキーム」に記載されています。
5.2.1。 システム
「システム」コンポーネント、または単にシステムは、システムリソースの初期化を担当します。システムリソースは、エンジンの動作中にほとんど変更されません。 たとえば、グラフィカルシステムはリソースのアドレスを分析して、リソースの場所を特定し、リソースの使用時に読み込みを高速化します。 また、画面の解像度も設定します。
システムは、フレームワークの主要なエントリポイントです。 シーンの作成と削除の方法と同様に、それ自体に関する情報(システムのタイプなど)を提供します。
5.2.2。 シーン
シーンコンポーネント、またはシステムシーンは、現在のシーンに関連するリソースの管理を担当します。 ユニバーサルシーンは、システムシーンを使用して、その機能を使用して機能を拡張します。 例として、新しいゲームワールドを作成し、シーンの初期化時にその中の重力を決定するために使用される物理シーンを引用できます。
シーンは、オブジェクトを作成および破棄するためのメソッド、シーンを処理するための「タスク」コンポーネント、およびそれにアクセスするためのメソッドを提供します。
5.2.3。 対象
「オブジェクト」コンポーネント、またはシステムオブジェクトはシーンに属し、通常、ユーザーが画面に表示するものに関連付けられます。 汎用オブジェクトは、システムオブジェクトを使用して、独自のプロパティを提供することで機能を拡張します。
例は、画面上に木製の梁を表示するためのユニバーサルオブジェクトの幾何学的、グラフィック、および物理的な拡張です。 幾何学的プロパティには、オブジェクトの位置、方向、スケールが含まれます。 グラフィックシステムは、特別なグリッドを使用して表示します。 そして物理システムは、他の物体との相互作用や重力の作用力を計算するために、固体の特性をそれに与えます。
場合によっては、ユニバーサルオブジェクトまたはシステムオブジェクトの拡張機能の1つでの変更を考慮する必要があります。 この目的のために、行われた変更を追跡できる特別なリンクを作成できます。
5.2.4。 挑戦する
タスクコンポーネント、またはシステムタスクは、シーンの処理に使用されます。 . .
, . . .
. . 3.2.2.
6.
. , .
6.1.
.
- .
- , , .
- , .
- , .
- , .
10.
6.2.
, .
- . , , .
- , .
- , , .
- , , . , . .
- .
- , .
11.
6.3。
- , .
- , , .
- , . ( ) .
- , , .
- . .
6.3.1.
.
- , , , . ( . , .)
- , .
- (, ). . , .
- . , .
- , . , (, — ).
- ( , .).

12.
6.3.2.
, .
- . , .
- ( ). , .
- , , , . , . , .
6.3.3.
. : , , . . «», . «» , . , «», « » .
7.
2, « ». , . , , .
«» — . , . , .
. D .
, . .
A.
(. . 4, « »).
B.

C. ( )
«» « - . », . , . , . , . («Design Patterns: Elements of Reusable Object-Oriented Software», Gamma E., Helm R., Johnson R., Vlissides J.). 1995 Addison-Wesley.
: - , , . , . . . .

13. «»
.
- , .
- . . .
- ( ) , . , , . .
- , .
- .
- .
- ( ).
- , .
D.
. . . . . , , Threading Building Blocks Intel.
, . .
- . , . , , , . .
- : . , — . , .