初めに、あなた自身についてのいくつかの言葉。 私はブルノの工科大学でコンピューターグラフィックスとマルチメディア学科で1年間博士号を取得するために勉強しています。 私の研究は、コンピュータービジョンとサービスロボット工学に関連しています。 具体的には、Microsoft Kinectなどのカメラから取得したいわゆる「ポイントクラウド」を使用して、3Dシーンのオブジェクト認識アルゴリズムを研究しています。 私にとって、学校への参加は、ITのこの分野の研究を始めたばかりなので、生活のさまざまな分野でコンピュータービジョンを使用する基本的な側面と可能性についての知識を深める良い機会です。 この春のサマースクールについては、学部で講義を行ったオーガナイザーの一人の発表から学びました。 主催者は大学への招待状を送信します(少なくとも、私たちの大学に送信しました)。
参加者の中には、英国、フランス、ウクライナ、スロベニア、チェコ共和国など、さまざまな国の人々がいます。 これらは主に専門分野の学生ですが、学部生もいました。 また、ロシアからの参加者がサマースクールで見られました。
サマースクールについて
VS3はすでに5年目に、プラハのチェコ工科大学(CTU)の電気工学部のサイバネティックス学科にある機械知覚センターを組織しています。 具体的には、学校の主催者は、オンドレイハム、ジリマタス(両方ともChVUTから)、およびヴィットリオフェラーリ(英国エジンバラ大学)です。

写真は、左から黒いTシャツを着たヴィットリオ・フェラーリ、中央にオンドラ・ハムです。
学校は8月17日から22日までChVUTの領土で1週間(より正確には6日間)合格しました。 ChVUTの土木工学部の建物で講義が行われました。 イベントのすべての主要オブジェクトは、 ここで表示できます 。

学校の目的は、コンピュータービジョンに何らかの形で関係している人々と、この分野での現在の成果と現在のタスクを知ることです。 また、学校はこの分野でよく知られている専門家や実務家と知り合い、スポーツイベントで彼らと競う楽しい機会です。 学校に関する情報は公式ページにあります 。
講師として、世界中の有名な大学のコンピュータービジョンおよび機械学習の分野の専門家が招待されました。
- チェコ工科大学Jiri Matas(チェコ共和国プラハ);
- 英国ギルフォードのサレー大学クリスチャン・ミコライチク;
- エディンバラ大学(英国)情報学部、ヴィットリオフェラーリ。
- トロント大学ラケル・ウルタサン(カナダ、トロント);
- クリストフランパート、オーストリア科学技術研究所(オーストリアIST)。
- カールステンロザー、TUドレスデン、
- ダニエルクレマーズ、TUミュンヘン(ミュンヘン、ドイツ)、
- Ondrej Chum、チェコ工科大学(プラハ、チェコ共和国)。
学校は、毎日の理論的およびいくつかの実践的な演習(午前中)とスポーツイベント(後半)の形式で編成されています。 土曜日にワークショップが開催され、各講師がそれぞれの分野における現在の成果と傾向(ベンチマーク)を発表しました。 したがって、サマースクールの毎日は午前9時から午後6時まで忙しくなり、土曜日にのみ午後2時に終わりました。 今年のフルスクールプログラムはこちらから入手できます 。
講義とスポーツイベントに加えて、水曜日のバーベキューはChVUTのキャンパス外で開催されました。
登録と参加
学校で登録するには、ウェブサイトの登録セクションにある登録フォームに記入し、主催者から参加の確認を受け取った後に登録料を支払う必要があります。 博士課程の学生として、10175クローンを支払いました。 登録と支払いの日付は、学校の公式ページに記載されています。 現在の年の登録フォームはここで見つけることができます 。 ここで登録料の大きさを見ることができます。
登録料を補償することにより、この学校に参加するためにあなたの教員に支援を求める機会があります。 私の教職員の何人かと私はこの機会を利用しました。
サマースクールでは、ホテルでのイベントに複数の宿泊オプションを提供しています。 今年の宿泊オプションをここで見るか、自分で選ぶことができます(残念ながら、プラハのこの地域のホテルやホステルの価格は許容範囲です)。
トレーニングはどうでしたか
初日のプログラムは、8時の登録から始まりました。 各参加者は、参加の確認、毎日の学校プログラム、CTU食堂でのランチクーポン、および個別のブランドのウォーターボトル(スポーツイベント用)を受け取りました。


学校の講義は、オンドラ・フマとヴィットリオ・フェラーリの主催者による開会の言葉から始まりました。 その後、コンピュータービジョンに関連するさまざまなトピックに関する一連の講義が1週間続きました。
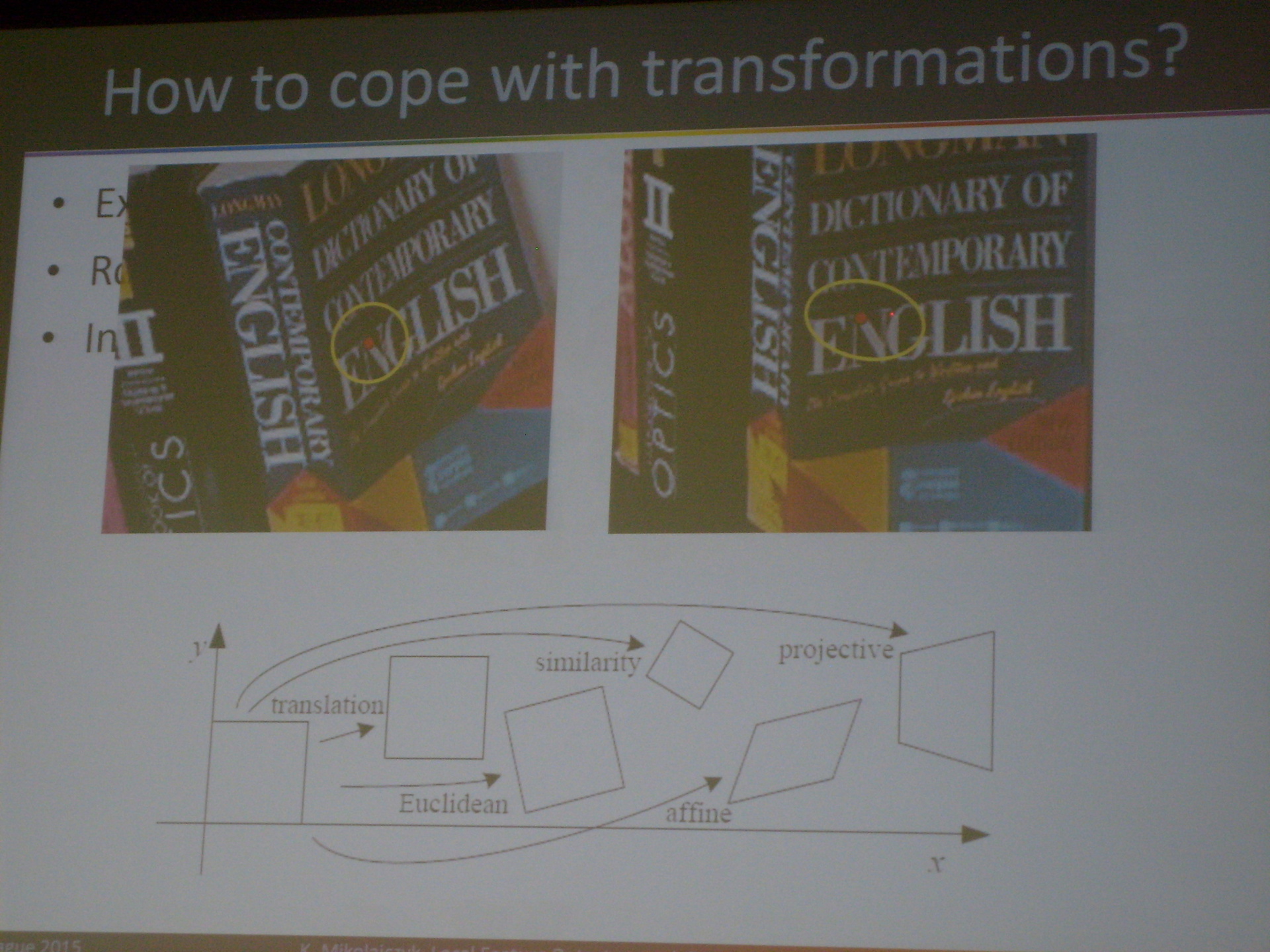
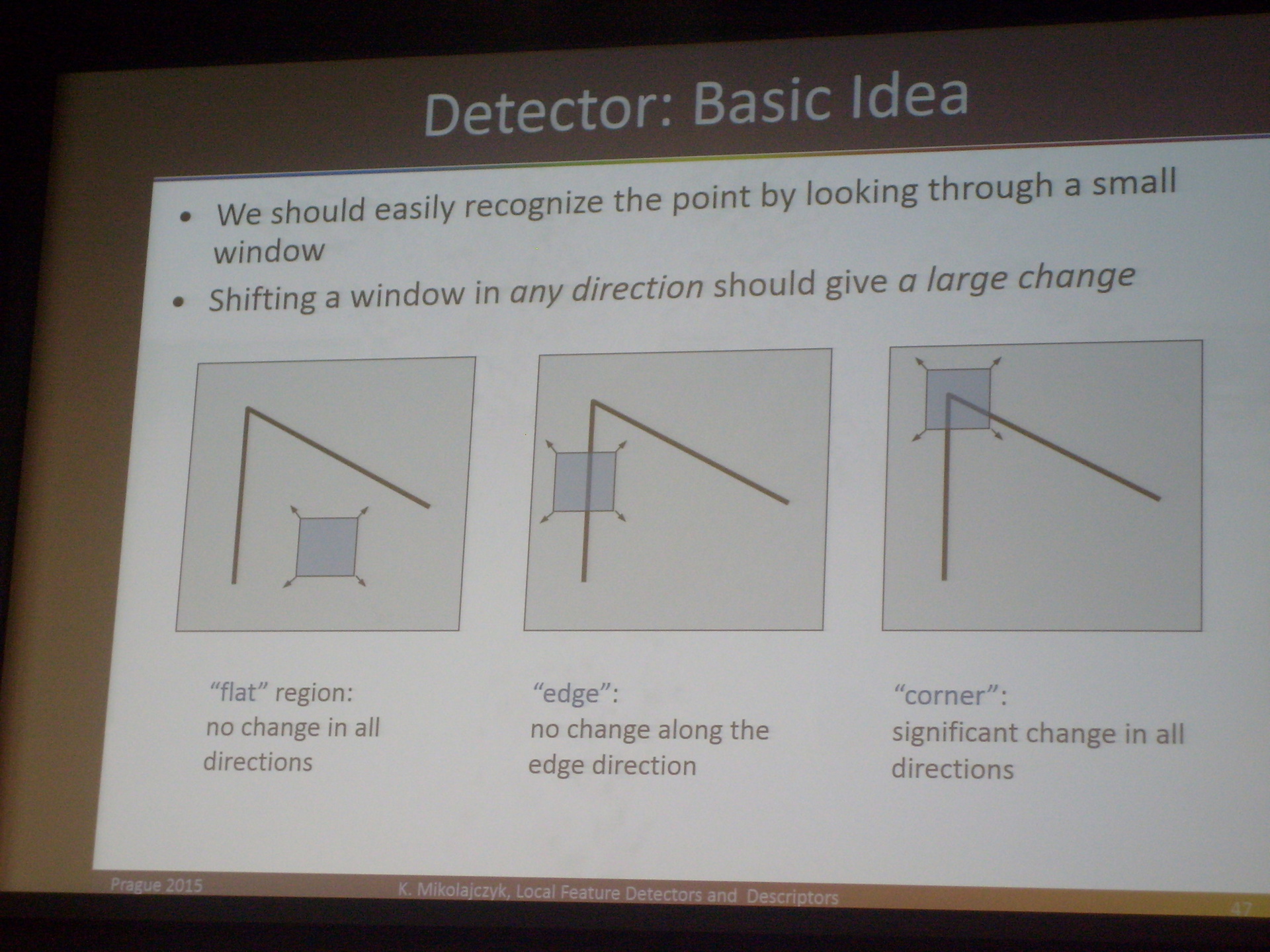
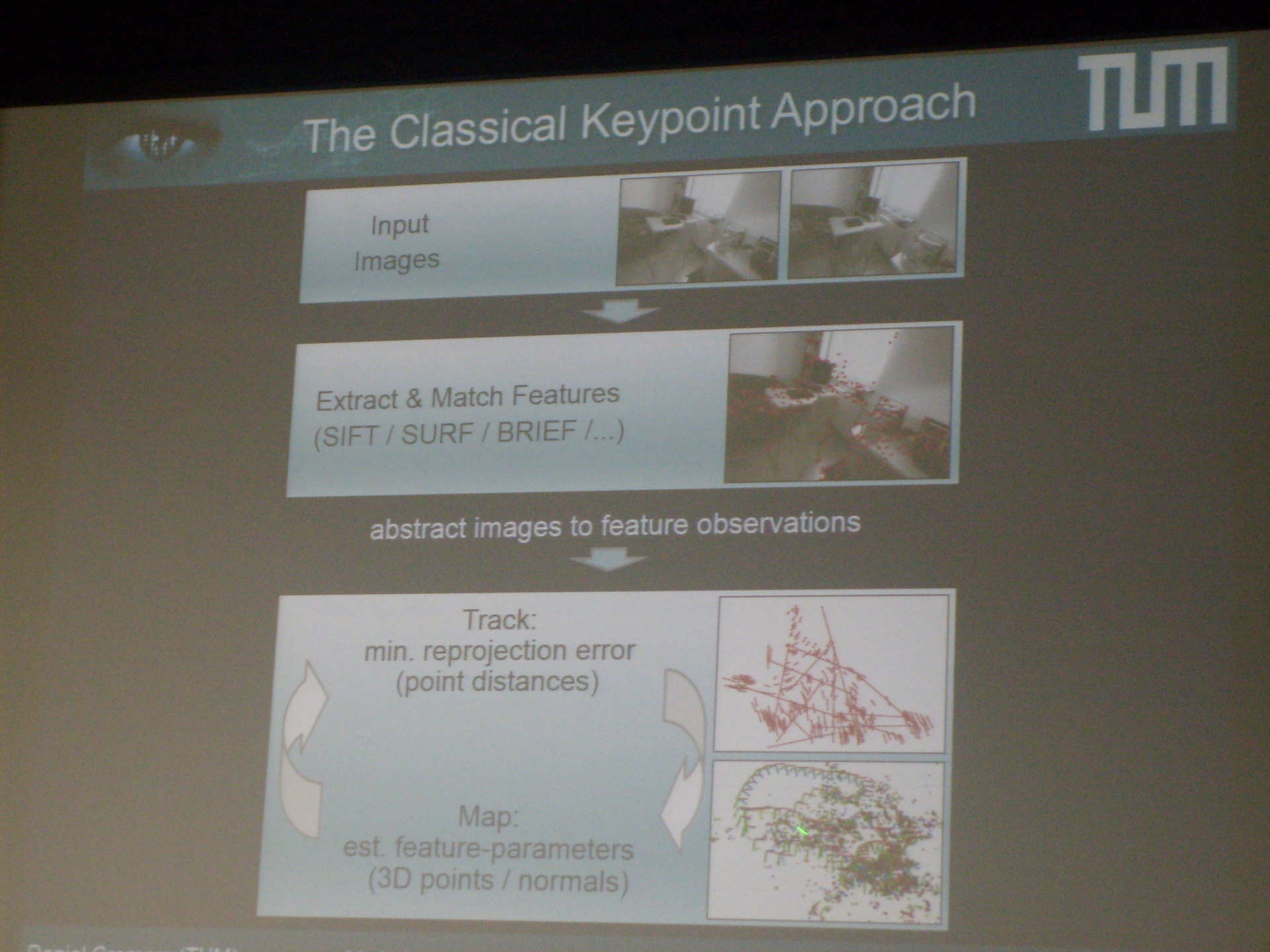
Krystian Mikolajczykは、コンピュータービジョンのさまざまなタスクを解決するためのローカルフィーチャの抽出とマッチングについて話しました。オブジェクト認識からパノラマの作成からロボット工学のSLAMオリエンテーションテクノロジーまで。 ここでは、さまざまなタイプの変換、特にアフィン変換とスケーリングに関する検出器不変性の問題に特別な注意が払われました。
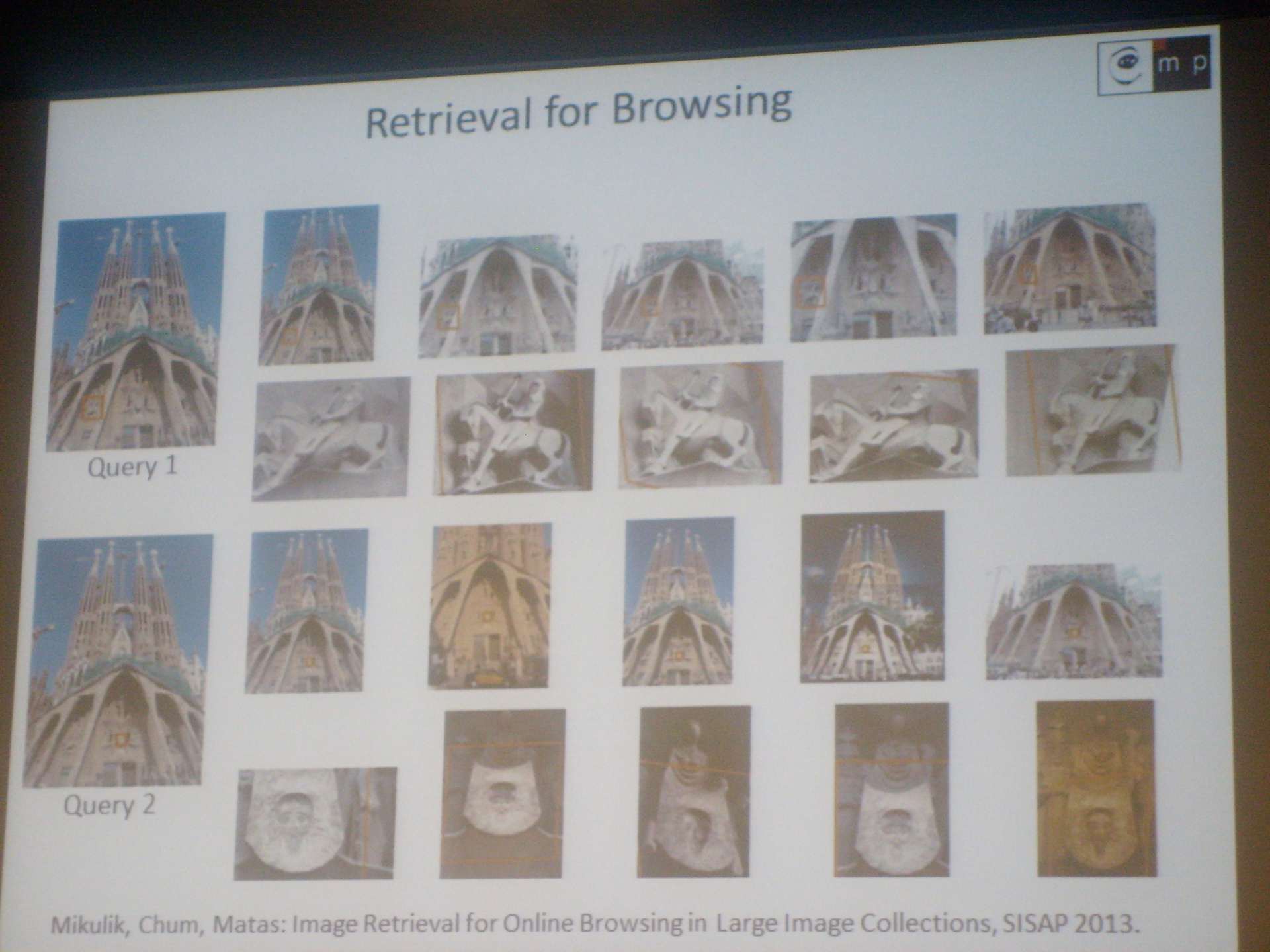
Ondrei Humは、画像内の単語のバッグのセットに基づいてそのような画像を検索する問題の解決策、特に特徴空間でのK平均法の使用について話しました。 講義の最後に、オンドラハムは、ChVUTの同僚が開発した興味深いプロジェクトを紹介しました。このプロジェクトでは、特定の画像フラグメントの類似画像を検索します。 このアプリケーションを使用すると、ユーザーは画像上のフレーム(たとえば、大聖堂のファサードの彫刻)で興味深い詳細をフレームに収めることができ、それに応じて、同じ視点から、異なる視点から、異なるスケールで、さらに詳細にこの部分を含む可能性のあるすべての関連画像を提供します。 また、アプリケーション開発者は、類似性のより優れた「スマートな」検索のために、画像のコレクションに基づいて建築オブジェクトの3D再構築を実行することができました。

コンピュータービジョンの講義MRF / CRFのKarsten Roserは、ランダムフィールド(Markovランダムフィールドと条件付きランダムフィールド)、インタラクティブな画像セグメンテーション、ノイズ除去(画像のノイズ低減)、ステレオマッチングの問題を解決するためのアプリケーションについて説明しました。

Christophe Lamperは、構造化予測モデル、標準回帰、因子グラフなどの確率的グラフィカルモデル、確率的推論、構造的SVMについて説明しました。
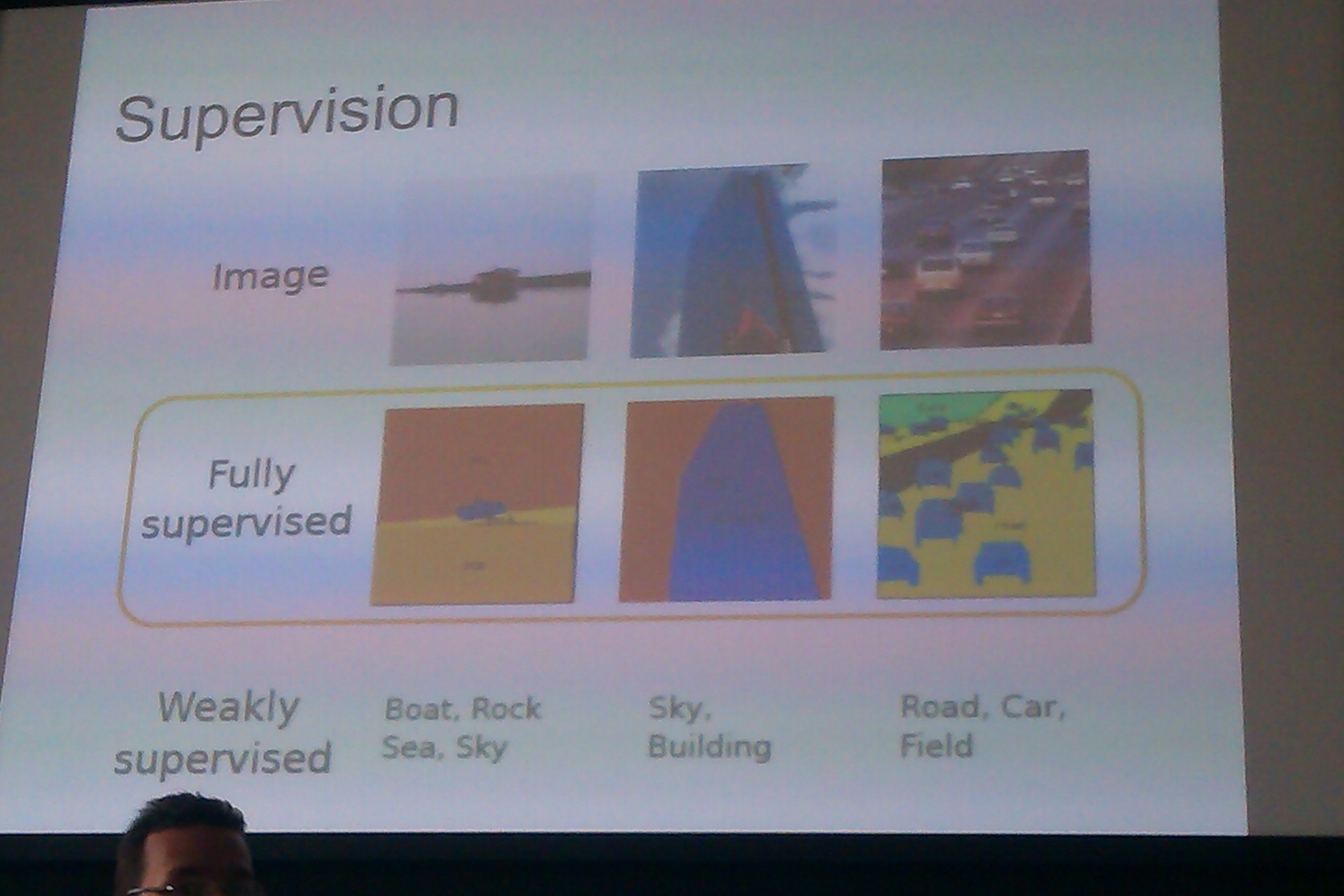
ヴィットリオフェラーリは、弱教師あり学習(WSL)手法を使用して、セマンティックセグメンテーション問題を解決する視覚モデルを訓練し、WSLで畳み込みニューラルネットワークを使用することについて話し、弱教師あり学習と完全教師あり学習を比較しました。
ダニエルクレマーズは、変分法と幾何学的再構成に関する講義の一環として、画像内のオブジェクトのセグメント化、3D再構成、SLAMなどの手法を使用した地形マップの構築の例により、変分法を使用してコンピュータービジョンの問題の解決を最適化する方法を説明しました。
Jiri Matasは、ビデオでの視覚的な追跡、追跡および直接追跡のためのオブジェクト検出のさまざまな方法、追跡プロセスのトレーニングテクニックについて説明しました。
Raquel Urtasanは、ディープ構造化学習の基本について説明し、畳み込みニューラルネットワークの概念と、分類、オブジェクトのローカリゼーション、セマンティックセグメンテーションの問題におけるその応用について説明し、CNNと組み合わせたグラフィカルモデル(CRF、MRF)の使用についても話しました。
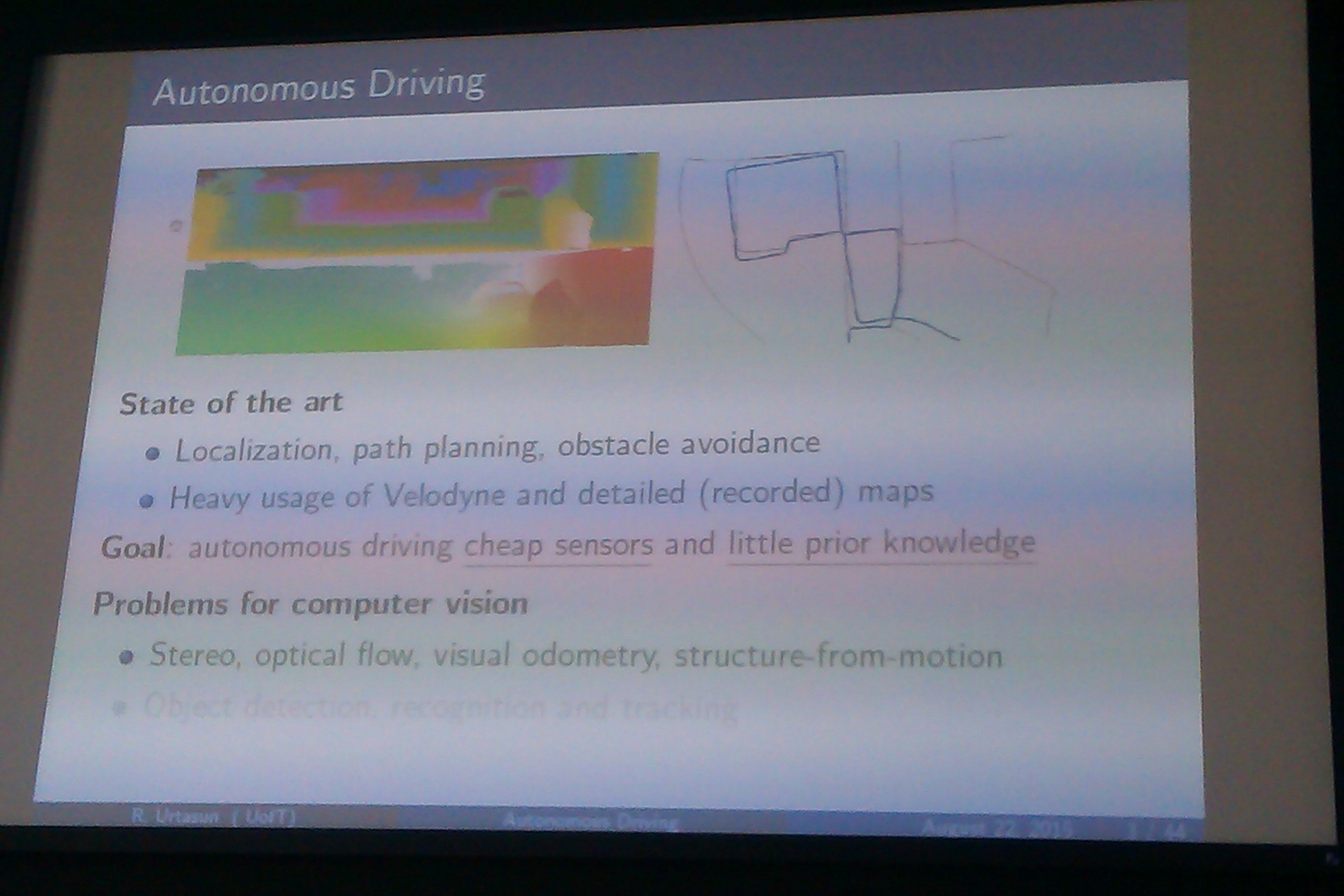
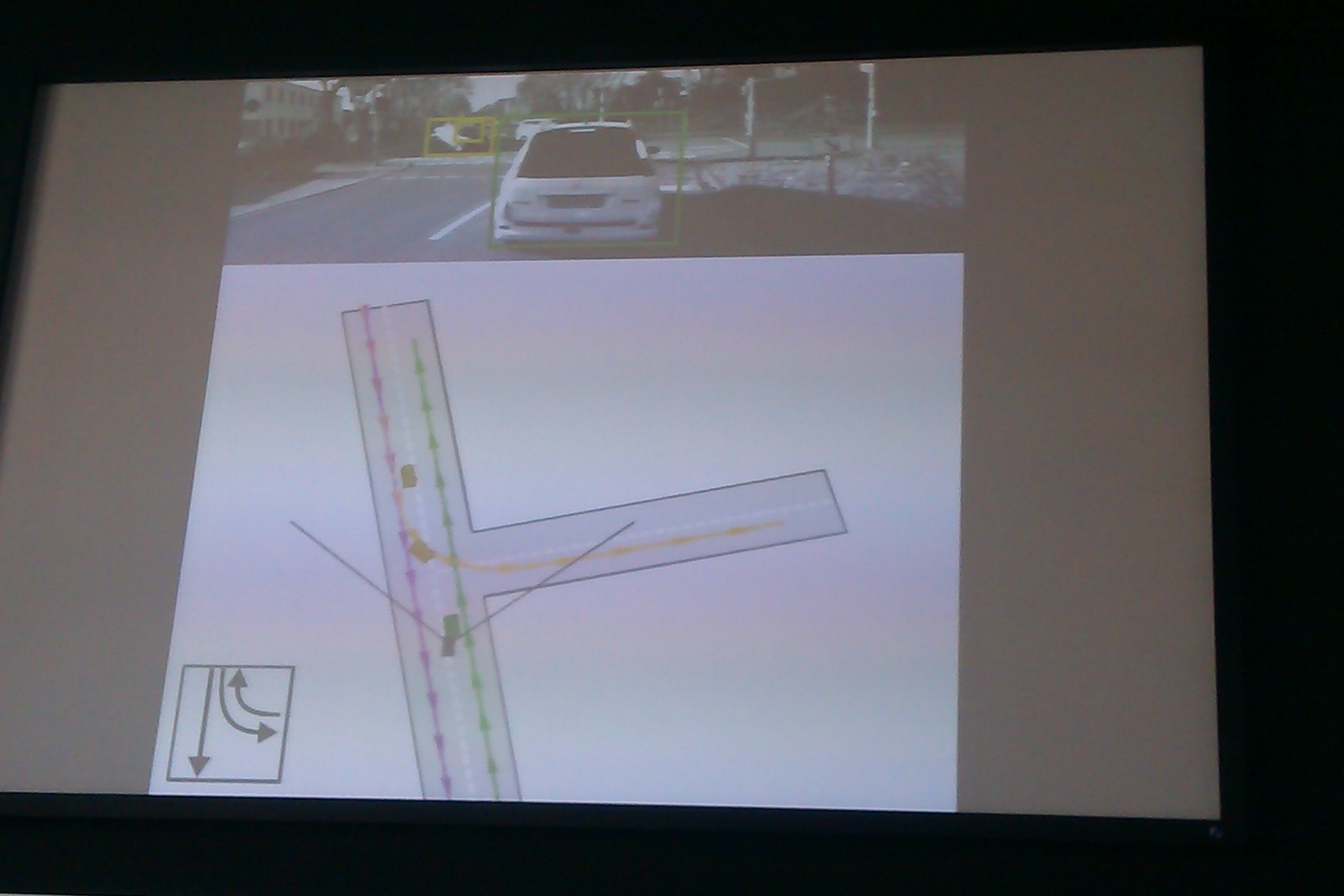
ご希望の方は、 こちらの土曜日のワークショップのプログラムをご覧ください 。 何よりもクリスチャン・ミコワジクとラクエル・ウルタサンの演奏を覚えています。 ChristianMikołajczykは、ボールの軌跡を追跡し、プレーヤーの行動を認識することにより、テニスゲームの自動注釈について話しました。 Raquel Urtasanは、自動運転の分野における最新のプロジェクトについて話しました。車のローカリゼーション、道路計画、およびステレオカメラに基づく街路の3D再構築です。 ワークショップの講義の写真をいくつか紹介します。


実践に関しては、2つの実践的な演習が行われました。
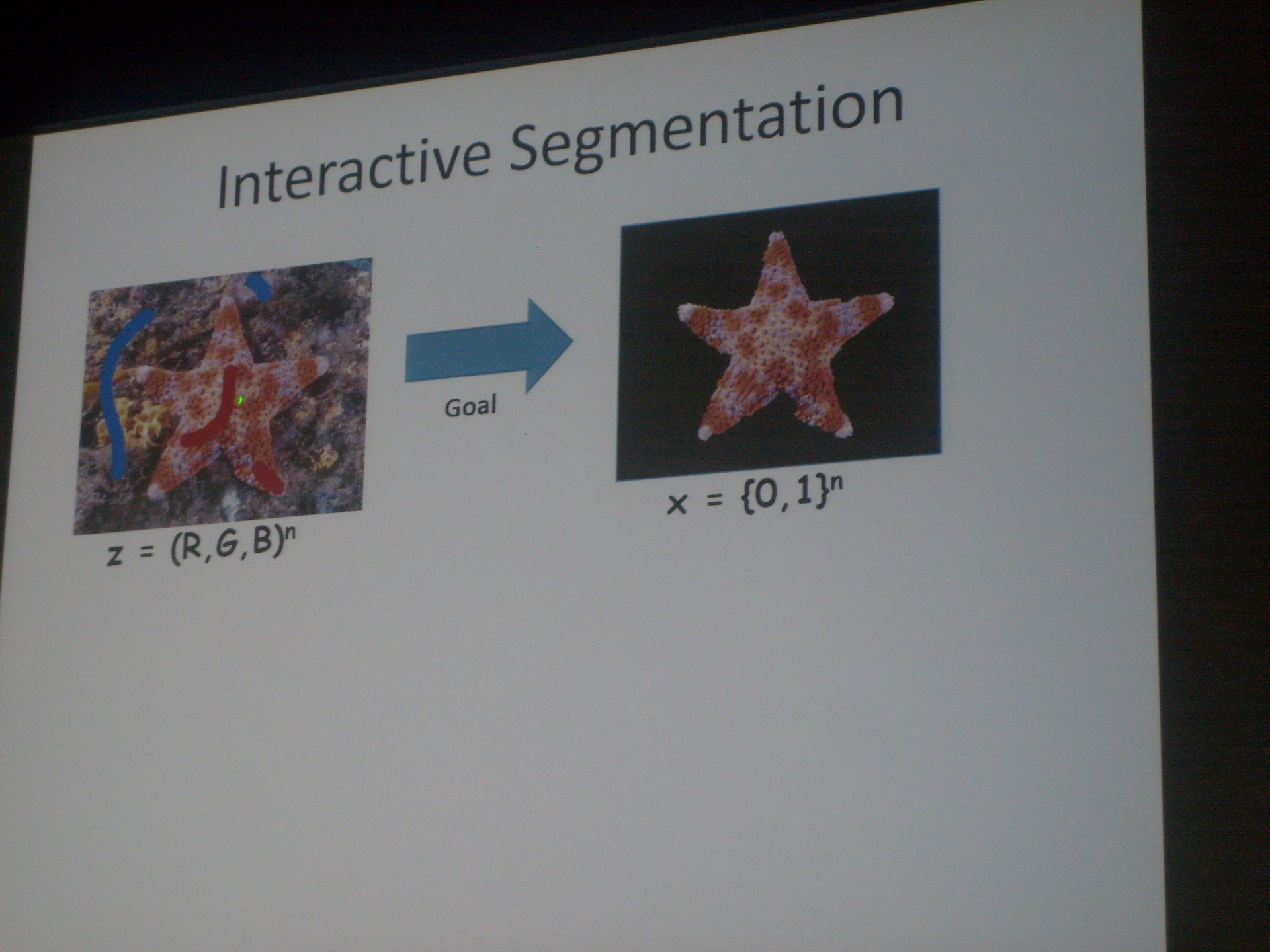
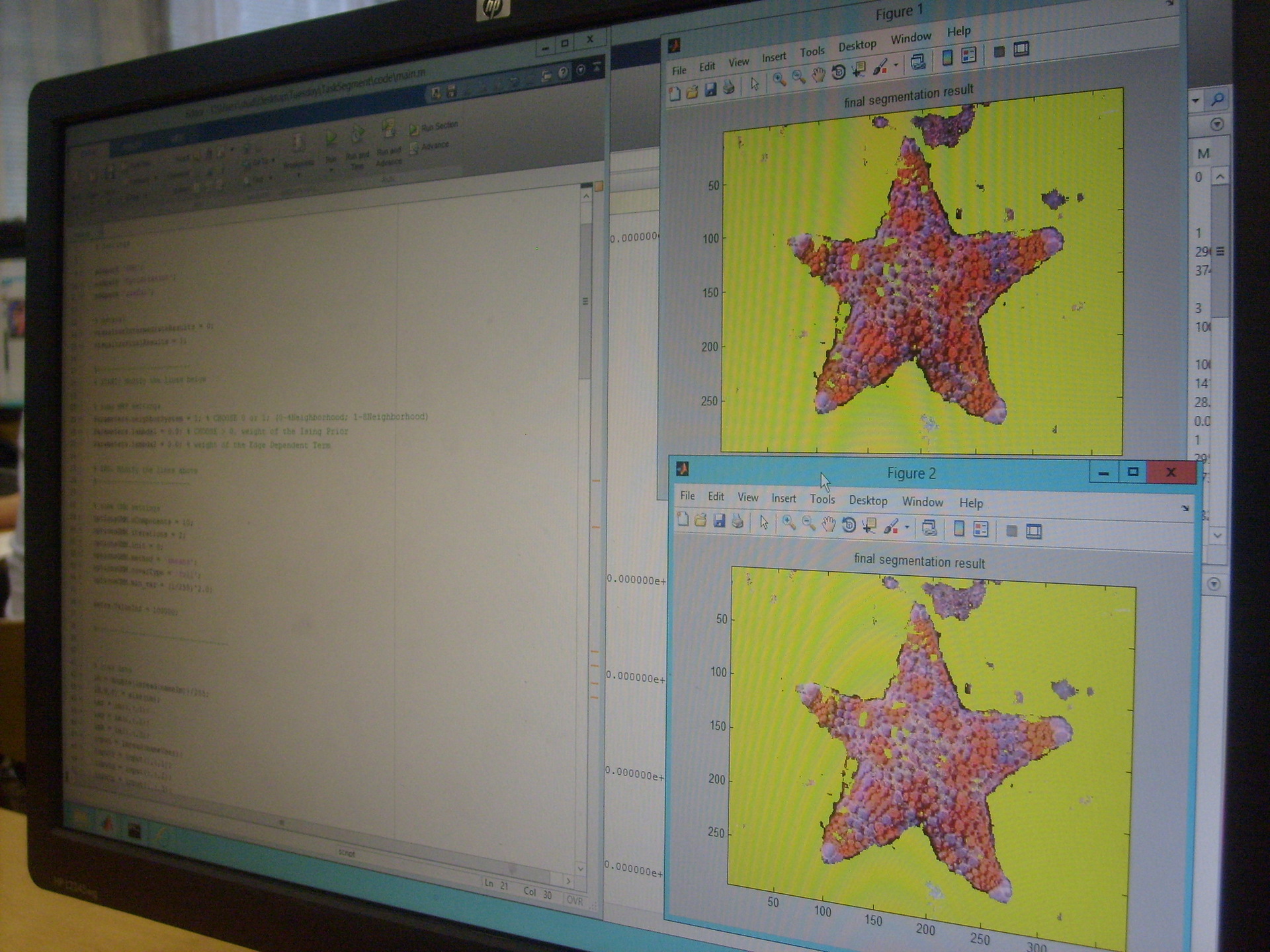
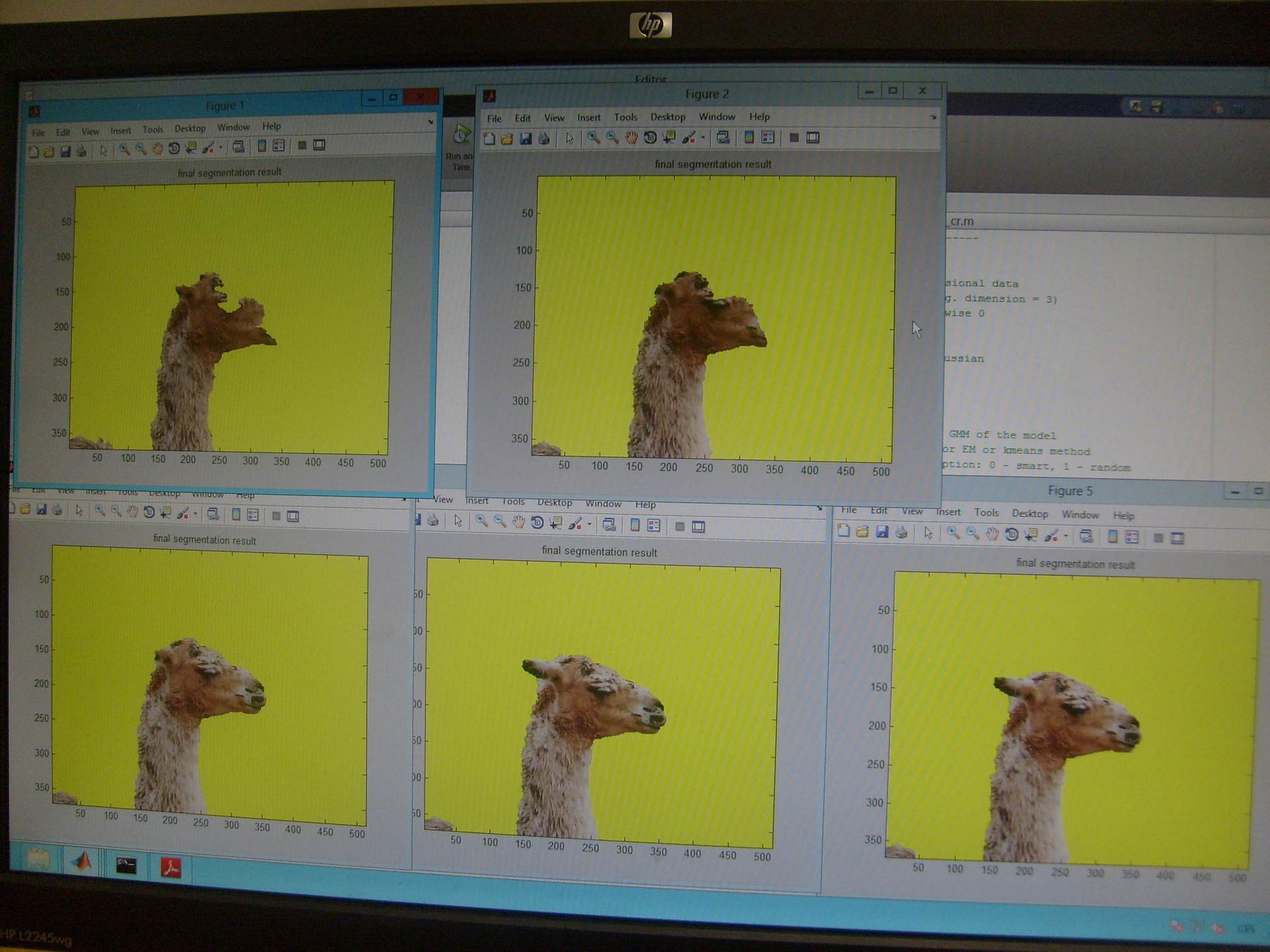
最初の実践的なレッスンは、Carsten Roserの講演のトピック、MRF / CRF for Computer Visionに当てられました。 このレッスンは、MATLABプログラムにWindows Server 2012がインストールされているコンピューターのコンピューター教室で開催されました。 タスクは次のとおりです。 タスク1は、インタラクティブな画像分割に専念しました。 画像のセグメンテーションのスクリプトのロジックを調べ、セグメンテーション結果に対するさまざまなアルゴリズムパラメーターの影響を調べる必要がありました。 スクリプトは、それぞれ青色と赤色のブラシストロークを使用して背景領域とオブジェクトを選択した注釈付きの画像を取りました(ストロークの下のピクセル色はアルゴリズムによって使用されました)。 また、タスク1では、より良い結果を得るために、セグメンテーションを最適化するためにスクリプトを変更する必要がありました。 2番目のタスクは、ノイズ抑制問題を解決することであり、最良の結果を得るために最適なパラメーター値を見つける必要がありました。 実用的なタスクにより、実用的な問題でランダムフィールドを使用する理論の表面的な理解だけでなく、MathLabでの経験も得ることができました。


2番目の実用的なタスクは、標識の抽出とそれらの助けを借りた類似画像の検索に専念しました。 レッスンはオンドラハムでした。 2つのタスクが与えられました。 最初のタスクは、月曜日の講義で発表された単語の袋と反転ファイルに関するものでした。 マトリックスの形式で提示された特定のデータベースの画像を検索するスクリプトを個別に実装する必要がありました:マトリックスの行は1つのドキュメント(属性値)の単語の袋を表し、各列は1つの単語(属性)を表します。
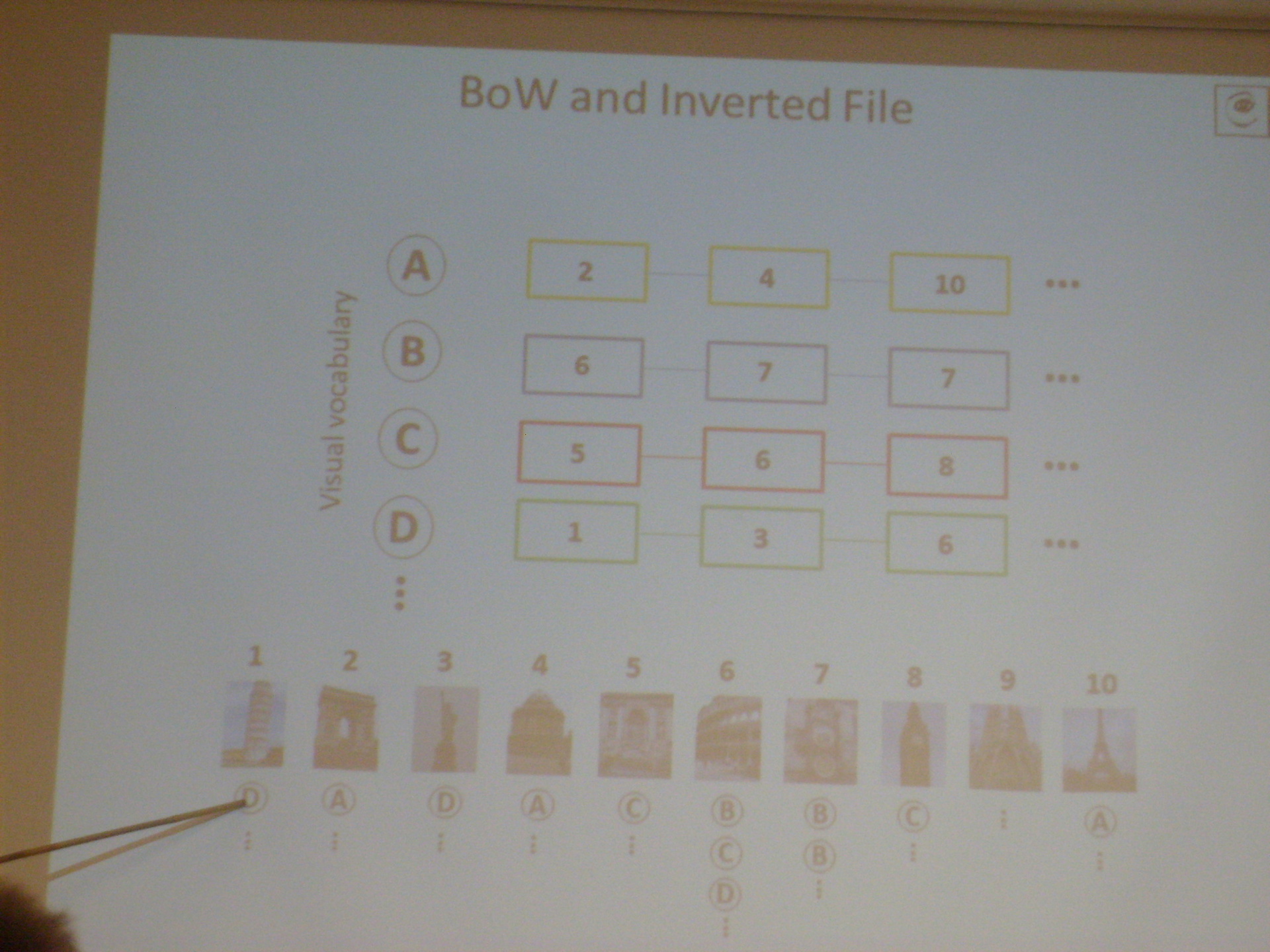
割り当てでは、どの連続ステップを実行し、どのMATLAB関数とデータ型を使用するかを指示しました。 また、参加者を支援するために、講義のスライドが提供されました。 最初は、既存のデータ構造とすべての単語の重みに基づいて、データベースのマトリックスを作成する必要がありました。 興味深い点は、idfパラメーターの計算、式を使用した各視覚単語の重みの計算です。
idf(X) = log(# documents / # documents containing X)
ここでは、単語Xを含むドキュメントの数を計算する必要がありました。
データベースマトリックスを構築した後、特定のフラグメントの類似画像を検索する要求を満たす必要がありました。 クエリの結果は次のようになりました。
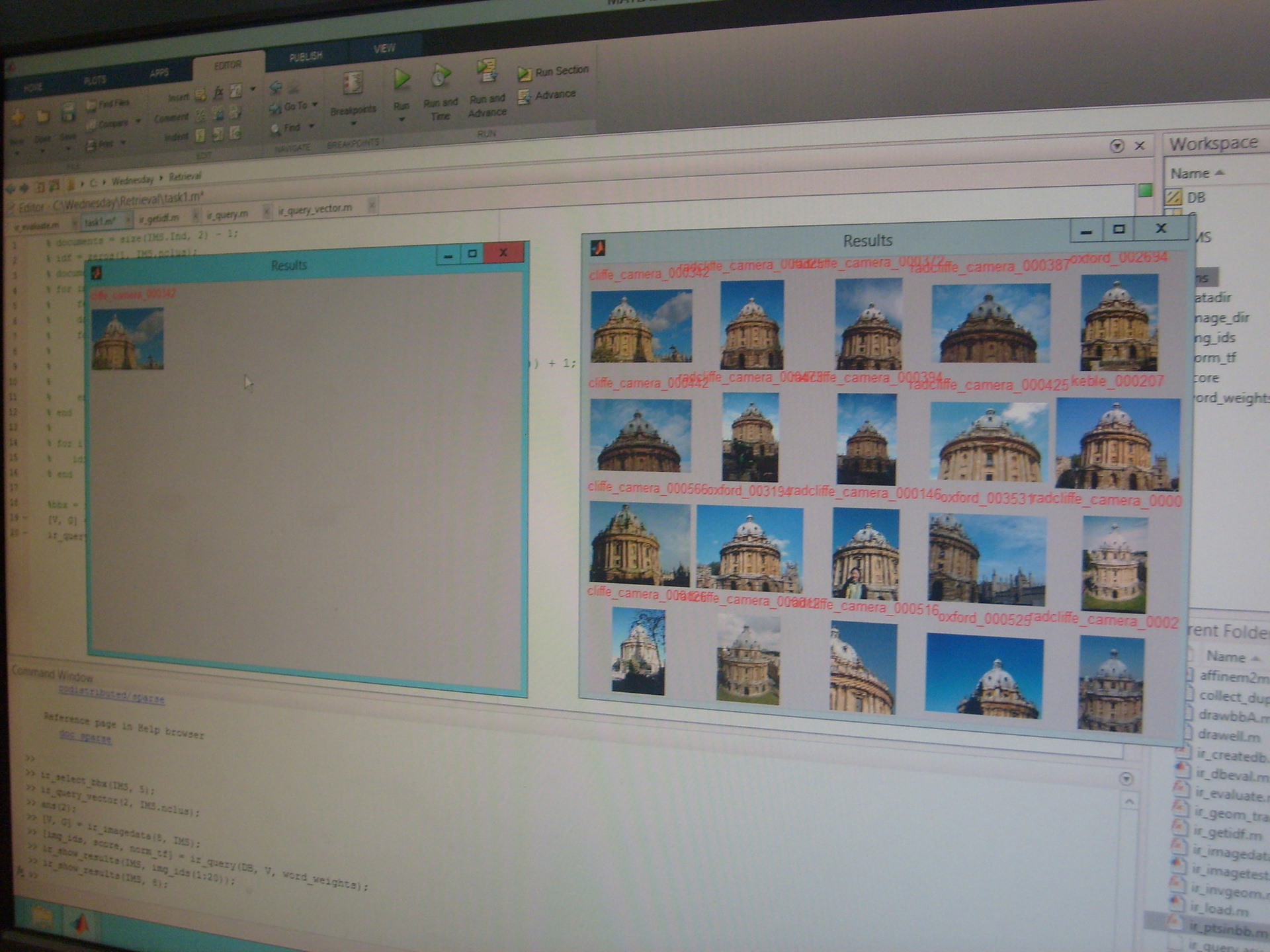
したがって、タスクは、アルゴリズムのロジックを実行および研究するだけでなく、問題を解決する方法を見つけるためのアルゴリズムスキルも必要としました。
スポーツイベント
学校の前の月に、各参加者は学校の主催者から興味のあるスポーツを選ぶようにメッセージを送られました。 学校の時刻表を整理する際、主催者はすべての参加者を毎日グループに分けて、いくつかのスポーツグループが毎日開催されるようにしました。 私はそのような計画を持っていました:月曜日-バドミントン、火曜日-アーチェリー、水曜日-卓球、木曜日-バレーボール、金曜日-ソッカー(サッカー)。
サッカー、バドミントン、バレーボールのスポーツホールのように見えます。

おわりに
学校は終わったが、多くの感情と記憶が長い間残った。 サマースクールについての結論として何を言いたいですか? 講義プログラムが示したように、コンピュータービジョンの機械学習は有望なトレンドになりつつあります。グラフィックモデル(CRFおよびMRF)から畳み込みネットワークの急速な成長を伴うディープラーニングまでです。 特に嬉しかったのは、3D再構築や自動運転車の視覚ナビゲーションなど、ステレオビジョンの分野で開発が増えていることです。 私の意見では、実際の演習は十分ではありませんでした。 それにも関わらず、実施されたプラクティスは、非常に豊富なプログラミング言語MATHLABを導入しました。これは、希少なマトリックスの構築など、非常に強力で実用的な機能を備えています。 また、興味のあるいくつかの優れた履歴書についても学びました。読者にもアドバイスします。
- デイビッド・A・フォーサイス、ジャン・ポンセ-コンピュータビジョン:現代のアプローチ
- 金谷健一-幾何代数の理解:コンピュータービジョンとグラフィックスのためのハミルトン、グラスマン、クリフォード。
- Richard Szeliski-コンピュータービジョン:アルゴリズムとアプリケーション。
各参加者は、この学校で自分にとって有益なものを見つけますが、それへの参加は無駄ではありません。 学校の組織に関する情報は、毎年4月に利用可能になります。 Vision and Sports Summer School 2016についての情報が表示されたらすぐに、今後の学校についての短い発表を書きます。 意欲を示し、将来のVS3学校への参加申請を送信するすべての人に、あなたの注意と幸運に感謝します!
PS。 機械学習の技術が得意ではなく、講師による講義のプレゼンテーションで何かを誤解している可能性があるため、講義の簡潔な内容を説明する際に不正確な点がいくつかあります。