はじめに
この記事では、止められない接続を備えた機械システムの運動の問題を解決するための、型破りなアプローチを検討することを提案します。 このような問題を解決する場合、システムが通信から解放される条件を分析する必要があり、また、機械的衝撃の概念に密接に関連する通信に戻るときのシステムの動きの性質の変化を決定する必要があります。 そのような動きを形式化する方法の例として、簡単な問題を考えます
1.問題の声明
長さの固定された滑らかな水平スチールシリンダー内

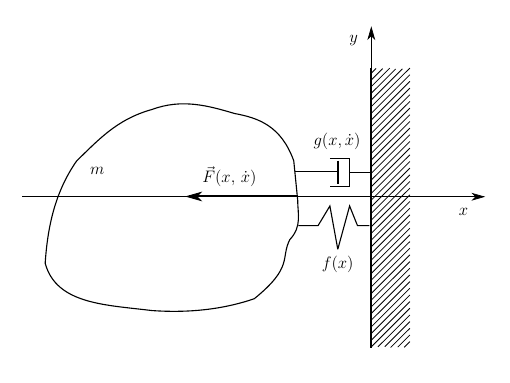
図 1.ピストンの動きの問題の設計スキーム
バネには予圧がかかっています
ピストン運動の法則を見つけることが必要です
2.問題の数値および分析解
2.1。 ピストンが動き始める瞬間の決定
ピストンの運動の微分方程式を作成します
どこで
明らかに、ピストンの動きは、力が発生した時点でのみ開始されます
式(2)は、シリンダーの動きを制限する制約を示しています。 (1)に(2)を代入すると、反応の大きさがわかります
ピストンの動きは一度に始まります
2.2。 力P ( t )の作用下でのピストンの運動の法則
タスクデータに基づく
どこで
この線形方程式の一般的な解の形式は
どこで
(5)を(4)に代入すると、未知の係数AおよびBの方程式が得られます(5)
(6)を考慮すると、式(4)の一般的な解が得られます。
で
ようやく
数値的に超越方程式を解く
瞬間を見つける
2.3。 P ( t )終了後の衝突前のピストンの動き
時間に
初期条件下でそれを解く
(9)から、ピストンが前方に移動することがわかります
2.4。 シリンダーとの衝突後のピストンの動き
古典的な衝撃の理論によれば、身体が動かない障壁に対する共線的な衝撃の場合、回復係数の方程式
どこで
等式(8)に従い、
ある時点で
n回目の衝撃の後、ピストンは法則に従って動きます
どこで
2.5。 ピストン運動則のグラフ
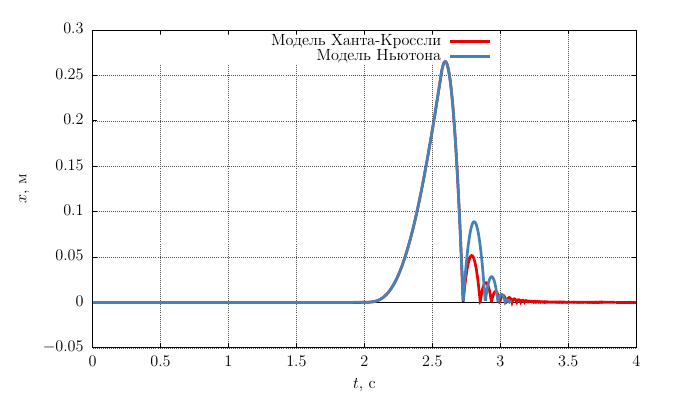
問題の初期データを考慮に入れて、得られた分析依存関係は、ピストンの座標の時間依存性のグラフを与えます
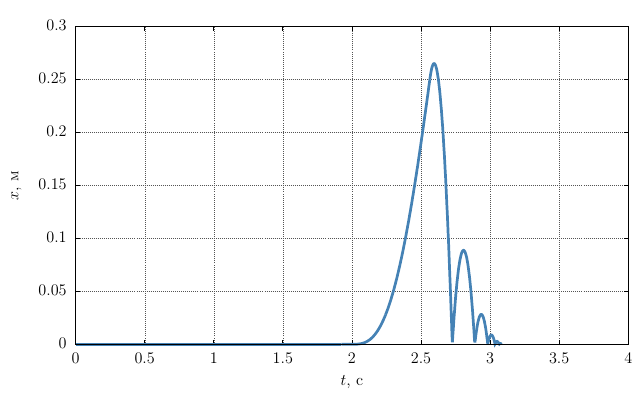
問題を解決する過程で、それがいくつかの異なる微分方程式がそれぞれ使用されるいくつかの段階に分割されることは明らかです。 さらに、代数方程式(10)を使用して、衝撃後のピストン速度を計算します。
通信から1つの詳細のみがリリースされ、それとの定期的な衝突が発生するかなり単純なシステムを検討します。 そして、そのような詳細がさらにあり、それらの運動の微分方程式と相互作用の性質がより複雑な場合はどうなりますか? 上記の微分代数方程式をすべての場合に機能する1つの微分方程式に置き換えることは可能ですか? できます。
3.衝撃力の非線形弾性粘性モデル
私たちのタスクでは、カップリング反作用は本質的に、ピストンがバリアに侵入するのを妨げる弾性力です。 衝突についても同じことが言えます。 文献は、それらのほんの一部だけが弾性変形の衝突を受けるという仮定に基づいたアプローチを説明しています。 このようなアプローチにより、下図に示すように、慣性力のない、一般的な場合、非線形力要素によって媒介される結合との衝撃および接触相互作用を記述することができます。
この場合、衝突プロセスは次の形式の微分方程式で記述できます。
衝撃力は、フォームの依存性によって記述されます
この場合、衝撃の過程で、原点は障害物の表面に配置されます。 衝撃時のシステムの動作は、主に依存のタイプによって決まります
どこで
作品では、 Borovin G.K.、Diagel R.V.、Lapshin V.V. 非線形粘弾性共線衝撃モデル衝撃力のモジュラスが式によって計算されるモデルに従って提案されます
どこで
衝突領域の表面が平坦で非線形の場合、準静的なヘルツモデルに従って
凸面用。 モデル(11)は、非線形弾性粘性ハントクロスリーモデルと呼ばれます。 Borovin G.K.、Diagel R.V.、およびLapshin V.V.の研究は、Hunt-Crossleyモデルを使用した衝撃プロセスの詳細な分析研究を提供します。 モデル(11)を使用すると、回復係数の衝突速度への依存性が得られるという事実に言及することに限定されますが、これは実験データとよく一致しています。 下の図は、回復係数の衝突速度と係数への依存性を示しています
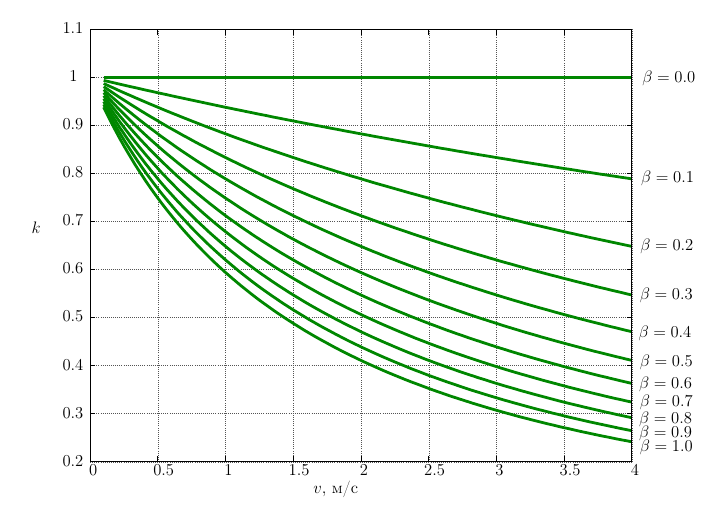
図 2.さまざまな散逸係数での衝突速度に対する回復係数の依存性
このモデルを使用して問題を解決してみましょう。
4. Hunt-Crossleyモデルを使用して数値的に問題を解決する
シリンダーの端面の反作用がアクティブな力の放出に伝達される場合、式(11)に基づいて、運動の微分方程式が得られます。
シリンダーが結合と相互作用する場合
このようなモデルは、静的接触下でのピストンとシリンダーの相互作用の性質をよく反映しています。(13)の速度がゼロに等しいという事実は、本質的に支持反作用である弾性力の表現を与えます。
問題の状態により、力
次のパラメーター値を受け入れます。接触剛性
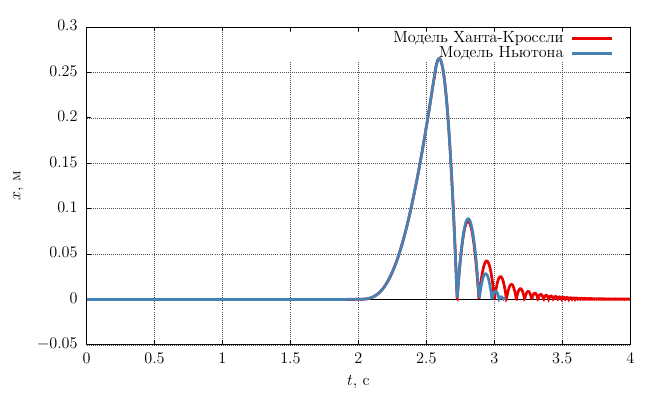
また、衝撃力の連続モデル(13)を使用した問題の数値解は、2回目の衝突まで解析解と一致する解を与えることがわかります。 2回目の衝突後、衝突速度に対する回復係数の依存性が影響を受けますが、これは問題の分析解で使用した従来のニュートン衝撃モデルでは考慮されていません。 図2のグラフに基づいて、速度が低下すると回復係数が増加します。つまり、シリンダーの端からのピストンの「跳ね返り」の振幅は、分析ソリューションの場合よりもわずかに大きくなります。
係数付き
得られた結果は分析解と完全に一致しており、このシステムの運動を研究するために1つの微分方程式(12)のみが使用されていることに注意してください
結論
不安定な結合の反応をアクティブな力で置き換えることにある、私たちが検討したアプローチ(13)には否定できない利点があります。運動は微分方程式で記述されます。 システムの動きをインターバルに分割し、通信に戻るための条件を分析し、初期条件を「適合」する必要性から解放されました。 この問題の解決策は、時間間隔全体にわたってこの運動方程式系を連続的に積分することです。 これは、より複雑なメカニズムの動きの分析に特に当てはまります。
このアプローチの欠点は、式(12)の剛性です。 おそらく、接触剛性の非常に重要なことに気づいたでしょう。 これにより、 ODEシステムの数値積分のための特別な方法の使用が強制されます。特に、この場合、著者は5次のルンゲクッタフェルバーグ法を使用しました。 この方法には、変数の統合ステップがあり、時間に対する依存性は次のようになります

このグラフをソリューションのグラフと比較すると、ピストンが接続部に戻るとピッチが減少することがわかります。
いずれにせよ、このアプローチには存在する権利があり、さらなる研究により、その使用の正当性が示されます。
ご清聴ありがとうございました!