WindowsリモートArduinoとは
Windows Remote Arduinoは、digitalRead / WriteやanalogRead / Writeなどの使い慣れたコマンドを使用して、Windows / Windows PhoneアプリケーションからArduinoボードのデジタルおよびアナログチャネルを制御できるWinRTライブラリです。 同時に、ボード自体をUSBまたはBluetooth経由でコンピューターに接続できます-シリアルデータチャネルを提供することが重要です。 何らかの形で入力/出力をオン/オフする単純なコマンドに加えて、I2Cバスと(将来)サーボが提供されます。

動作するには、 Firmataプロトコルを使用したコマンドの実行をサポートする特別なプログラムをArduinoボードで起動する必要があります。 Windows Remote Arduinoライブラリは、ボードとコマンドを交換し、プログラマに高度な管理機能を提供します。
WindowsリモートArduinoは、Windows 8.1 / Windows Phone 8.1およびユニバーサルWindows 10アプリケーションで使用できます。プロジェクトでそれらを使用するには、プロジェクトGitリポジトリのクローンを作成し 、必要なプロジェクトをソリューションに追加するのが現在最も簡単です (以下の例を説明します)。
例-ライトスイッチ
この例では、電気スタンドを含むインテリジェントなアプリケーションを開発します。 この目的のために、Arduino Unoボードと220Vの切り替えが可能なリレーを使用します。 リレーは、ある種のデジタル出力(たとえば、7)に接続されています。 また、人の存在を検出するために、 赤外線存在センサーを使用します。これはアナログ入力A0に含まれます。 切り替えの便宜上、 AmperkaのTroyka Shiledを使用します 。 上記のビデオでは、ハードウェアのセットアップと、実行中のプロジェクト全体について詳しく説明しています。
ArduinoボードにFirmataスケッチをインストールします
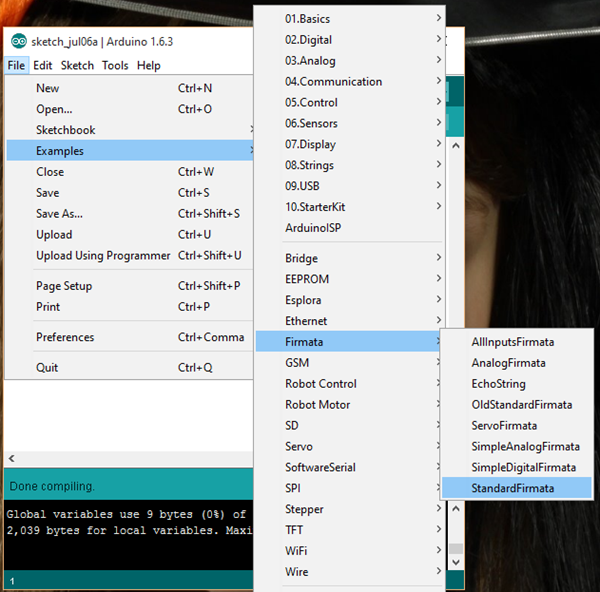
最初のステップは、Arduinoボードに標準スケッチをインストールしてFirmataコマンドを実行することです。 このようなスケッチはすでにArduino IDEの標準の配信に含まれています-メニューの[ファイル]-> [例]-> [会社名]-> [標準会社名]から選択するだけです。 これで開いたスケッチは、通常の方法でボードにロードする必要があります。
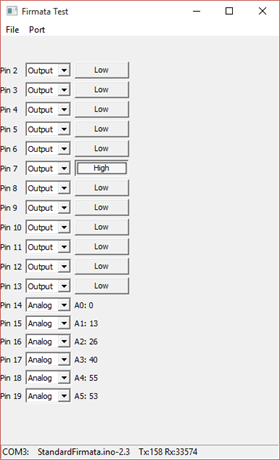
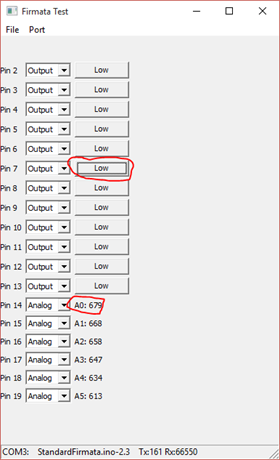
この時点で、すべてのハードウェアが正しく構成されていることを確認すると便利です。 これを行うには、特別なfirmata_test.exeプログラム(またはここで説明するプログラムのいずれか)を使用できます-デジタル出力7の状態を切り替えることで電球を制御できる必要があります。入力A0では、センサーの周りに動きがない場合、値0それ以外の場合は大きな正の値(約600以上)
Windows Remote Ardunioを使用してプロジェクトを準備しています
プロジェクトでWindowsリモートArduinoを使用するには、適切なライブラリを接続する必要があります。 現在、この技術は非常に新しく、ライブラリはソーステキストの形式で存在します。 時間が経つにつれて、NuGetパッケージが表示されることを願っていますが、ライブラリを含めるプロセスは次のとおりです。
- 新しいプロジェクトを作成します-この例では、ユニバーサルWindows 10アプリケーションになります
- Windows Remote ArduinoプロジェクトのGitHubリポジトリをいくつかのローカルフォルダーに複製します。
git clone https://github.com/ms-iot/remote-wiring/
重要 :リポジトリにはライブラリのいくつかのバージョンがあります。 執筆時点では、最後のマスターブランチには、アナログおよびデジタル入力で作業するときに多くのエラーが含まれていたため、最も安定したrevert-18-developブランチを使用します。 すぐにさらに安定したバージョンがリリースされ、ブランチを指定せずに上記のように複製できるようになることを本当に望んでいます。 - 結果のプロジェクトツリーには、Microsoft.Maker.Win10およびMicrosoft.Maker.Win8_1フォルダーがあります。 Windows 10のオプションを使用しますが、プロジェクトはWindows 8.1のユニバーサルアプリケーションもサポートします
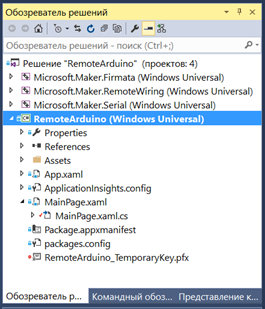
- Microsoft.Maker.Win10フォルダーには、Microsoft.Maker.Firmata、Microsoft.Maker.Serial、およびMicrosoft.Maker.RemoteWiringの3つのプロジェクトがあります。 これらの3つのプロジェクトは、作成したプロジェクトに追加する必要があります(既存のプロジェクトを追加)
- 結果は次のプロジェクトツリーです。
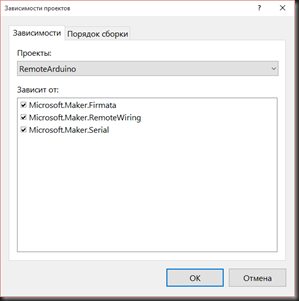
- プロジェクトを正しい順序でコンパイルするには、正しいプロジェクトの依存関係を確立する必要があります。 プロジェクトを右クリックして、「ビルドの依存関係->プロジェクトの依存関係」を選択し、追加された3つのプロジェクトすべてのボックスをオンにします。 残りの依存関係は既にインストールされているはずですが、確認できます。FirmataプロジェクトはSerialプロジェクトに依存し、RemoteWiringプロジェクトはFirmataおよびSerialプロジェクトに依存しています。 したがって、「ビルド順序」タブで、プロジェクトを次の順序でアセンブルする必要があります。シリアル、Firmata、RemoteWiring、およびアプリケーション。
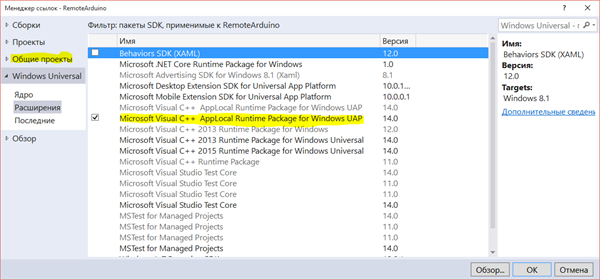
- メインプロジェクトで、[参照設定]を右クリックし、Windows UAP拡張用のMicrosoft Visual C ++ AppLocalランタイムパッケージを追加します。 同じ場所の[一般プロジェクト]で、追加された3つのWindowsリモートArduinoプロジェクトをすべて選択します。
- 重要:アプリケーションがシリアルポートを操作する機能を使用するには、セクションのアプリケーションマニフェスト(Package.appxmanifestファイル)で必要です。
<機能>
次のコードを追加します。
<DeviceCapability Name="serialcommunication"> <Device Id="any"> <Function Type="name:serialPort"/> </Device> </DeviceCapability>
- WindowsリモートArduinoライブラリを使用するアプリケーションを作成する準備ができました! すべてが正しく機能していることを確認するには、結果のアプリケーションを組み立ててみてください。
Windows Remote Arduinoでアプリケーションを作成する
アプリケーションには3つのボタンがあります。電球をオンにする、オフにする、および電球が存在センサーによって制御される自動モード用です。 まず、これら3つのボタンをMainPage.xamlアプリケーションのメインページに追加して、非アクティブ状態に設定します。
<StackPanel Orientation="Horizontal" HorizontalAlignment="Center" VerticalAlignment="Center"> <Button x:Name="on" IsEnabled="False" Content="ON" FontSize="30" Width="150" Height="150" Click="on_Click"></Button> <Button x:Name="off" IsEnabled="False" Content="OFF" FontSize="30" Width="150" Height="150" Click="off_Click"></Button> <Button x:Name="auto" IsEnabled="False" Content="AUTO" FontSize="30" Width="150" Height="150" Click="auto_Click" ></Button> <TextBlock x:Name="txt"/> <ListBox x:Name="lst"/> </StackPanel>
このコードは、ページがデフォルトですでに持っているグリッドコンテナー内に追加されます。 また、ボタンごとに、C#でハンドラー関数を作成します(各ボタンをダブルクリックするか、Visual Studioのプロパティウィンドウから)。
まず、リモートArduinoオブジェクトを初期化します。 これを行うには、 MainPage.xaml.csファイルのウィンドウクラスで、2つの変数を記述します。
UsbSerial usbcomm; RemoteDevice arduino;
Arduinoに接続するために、connect()関数を記述し、MainPage()コンストラクターから呼び出します:
private async void connect() { var dev = await UsbSerial.listAvailableDevicesAsync(); usbcomm = new UsbSerial(dev[0]); arduino = new RemoteDevice(usbcomm); usbcomm.ConnectionEstablished += Comm_ConnectionEstablished; usbcomm.begin(57600, SerialConfig.SERIAL_8N1); }
ここでは、まずArduinoを接続できる利用可能なポートのリストを決定し、次にこのポートでUsbSerialシリアル接続を作成し、次にこの上にRemoteArduinoオブジェクトがあります。これは仮想Arduinoです。 その後、begin関数を呼び出して、シリアル接続パラメーターを渡します。
重要: Firmatプロトコルで使用されるシリアルリンク速度は、StandardFirmataスケッチで指定されています。 デフォルトでは、57600に等しいため、アプリケーションでこの速度を選択します。 速度が一致しない場合、接続は機能しません。
ボードとの接続を確立すると、次のように説明するComm_ConnectionEstablished関数が呼び出されます。
private void Comm_ConnectionEstablished() { Dispatcher.RunAsync(Windows.UI.Core.CoreDispatcherPriority.Normal,new Windows.UI.Core.DispatchedHandler(() => { arduino.pinMode(14, PinMode.ANALOG); arduino.pinMode(relay_pin, PinMode.OUTPUT); dt = new DispatcherTimer() { Interval = new TimeSpan(500) }; dt.Tick += loop; dt.Start(); on.IsEnabled = true; off.IsEnabled = true; auto.IsEnabled = true; })); }
メイン関数コードは、UIスレッドで起動するディスパッチャコールにラップされます-これは重要です。 次に、メインのArduinoピンのモードを設定し、0.5秒ごとにloop()関数を呼び出すタイマーを作成し、ボタンを表示します。
興味深い点は、アナログモードでのポート14のインストールです。 実際のところ、Arduinoのアナログ入力にはデジタル入力の後に番号が付けられ、入力A0は番号14に対応します。モードは、入力ではなくANALOGに設定する必要があります。
ここで、電球をオン/オフするには、ボタンイベントハンドラー関数を次のように記述するだけで十分です。
private void on_Click(object sender, RoutedEventArgs e) { auto_mode = false; arduino.digitalWrite(relay_pin, PinState.HIGH); }
off_Click関数は類推によって行われます。 リモートArduinoボードのピンを操作するには、digitalRead / digitalWriteなどの使い慣れたコマンドが使用されることに注意してください。
変数auto_modeは、クラスで記述する必要があるbool型の変数です。 自動モードを処理するために必要です。 AUTOボタンは、この変数をtrueに設定します。
private void auto_Click(object sender, RoutedEventArgs e) { auto_mode = true; }
残っているのはループ機能を実装することだけです。ループ機能は、存在センサーからの信号の存在に応じてランプを切り替えます。 これは、auto_modeが設定されている場合にのみ行う必要があります。
private void loop(object sender, object e) { if (auto_mode) { arduino.pinMode(14, PinMode.ANALOG); var on = arduino.analogRead(0) > 512; arduino.digitalWrite(relay_pin, on ? PinState.HIGH : PinState.LOW); } }
重要 :より信頼性の高い操作を行うには、ポートを読み取る直前に、モードを再度アナログに設定することをお勧めします。 これはすべきではありませんが、実際には安定性が向上します。 また、以前はポート番号14を示していましたが、analogRead(0)を使用していることに注意してください。ポート番号0から5はanalogReadに送信されます。
Bluetooth経由でArduinoを接続し、スマートフォンから制御する方法
このケースでは、Windows Phone 10に配置できるユニバーサルアプリケーションを作成しました。ただし、ArduinoボードをUSB経由でスマートフォンに接続することはできないため、これは役に立ちません。 ただし、 BluetoothボードをArduinoに接続してUSB接続の代わりにBluetoothを使用する場合、このスマートフォンを使用してスマートフォンからデザインを制御できます。 この場合、次の行をアプリケーションマニフェストに追加して、Bluetooth通信を有効にする必要があります。
<DeviceCapability Name="bluetooth.rfcomm"> <Device Id="any"> <Function Type="name:serialPort"/> </Device> </DeviceCapability>
Bluetoothの使用については考慮しません。これは別の記事のトピックです。 ただし、プログラミングの観点からはほとんど違いはありません。UsbSerialの代わりにBluetoothSerialオブジェクトを使用する必要があり、他のすべての構成は変更されません。
ソースコードの入手先
私のプロジェクトのソースコードは伝統的にGitHubで入手できます: https : //github.com/evangelism/RemoteArduinoLamp/tree/v1.0-serial エラーを見つけた場合は試してみてください-プルリクエストを実行してください。
結論
Windows Remote Arduinoはかなり新しく未完成のテクノロジーですが、コンピューターに接続されたArduinoボードの入力/出力を直接制御する必要がある多くのタスクのソリューションを簡素化できるようになりました。 もちろん、スケッチを書いてシリアルチャネルを使用して対話することで同じことを手動でプログラムできますが、車輪を再発明しないように既成の開発と確立された標準(Firmata)を使用してください。
プロジェクトでWindows Remote Arduinoを使用してください。何かおもしろいことがあれば、喜んでお知らせします。 TwitterまたはVKontakteにコメントを書いてください !