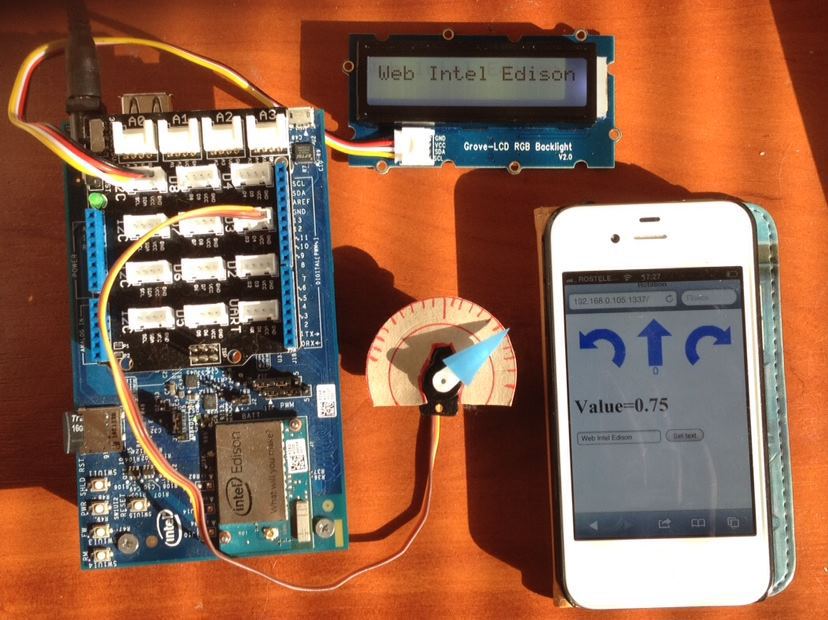
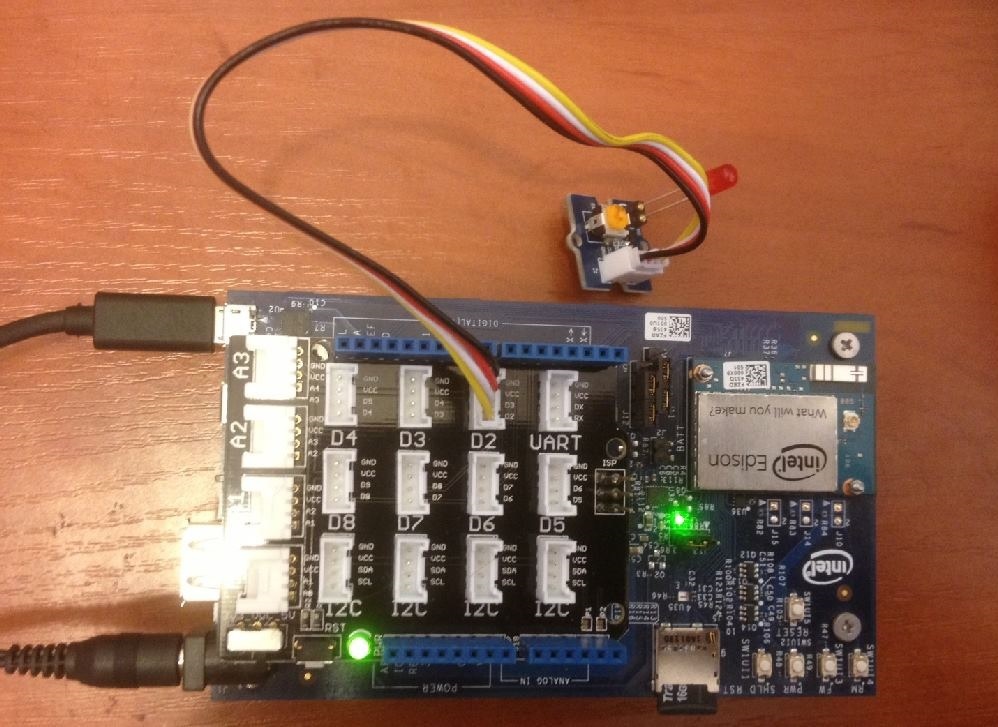
たとえば、写真のようなデバイス。 液晶画面とサーボ上のポインターがあります。 近くには、デバイス上のWebサーバーに接続された実行中のブラウザーを備えた電話があります。 ブラウザで矢印をクリックすると、ポインターが右、左に回転するか、ニュートラルに設定されます。 値を設定した後、値はブラウザに戻され、値として表示されます。 さらに、ブラウザでテキスト行を設定できます。これは、テキスト設定ボタンを押した後、LCD画面に表示されます。 すべての対話はWi-Fiを介して行われます。 どう思いますか、開発にどれくらい時間がかかりますか?
考えてみれば、やるべきことがたくさんあります。 デバイスで実行され、センサーと対話し、Webサーバーを起動し、バックエンド、フロントエンドを実装し、これらすべてを結合するC / C ++コードを記述します。 実際、すべてがはるかに単純です。 そして、私はすべてについてすべてのための十分な時間があると言うことを敢えてします。 なんで? はい、組み合わせてすぐにプロトタイプを作成できる既製のソリューションがあるためです。 Intel Edisonボード、Intel XDK IoT Edition開発環境、Grove Kitセンサースイート、およびたった1つのプログラミング言語であるJavaScriptを使用します。 はい、ありませんC / C ++。 すべてがシンプルで、箱から出してすぐです。
準備ができていない開発者でも迷子にならないように、基本から始めてすべてを順番に説明します。 最後に、最初に説明した例を検討します。
Grove Starter Kit Plus-Intel IoT Edition Gen2

Grove Starter Kitは素晴らしいものです。 一部のプログラマーは無線電子機器を使用することを恐れていることを知っています。 あらゆる種類のワイヤ、接続、はんだ付け、無線部品...しかし、このセットを使用すると、作業を簡素化できます。 すべてのセンサーは、標準コネクタを使用して普遍的に接続されており、必要に応じて誤って接続することはできません。 拡張ボード上のすべてのコネクタは署名されています。 必要なワイヤをセンサーに接続するだけで十分で、デバイスのソフトウェア部分に集中できます。
キットの内容:
- すべてのセンサーの標準接続用のコネクタを備えた拡張ボード。
- LED
- ブザー。
- リレー
- ボタンは正常です。
- タッチボタン。
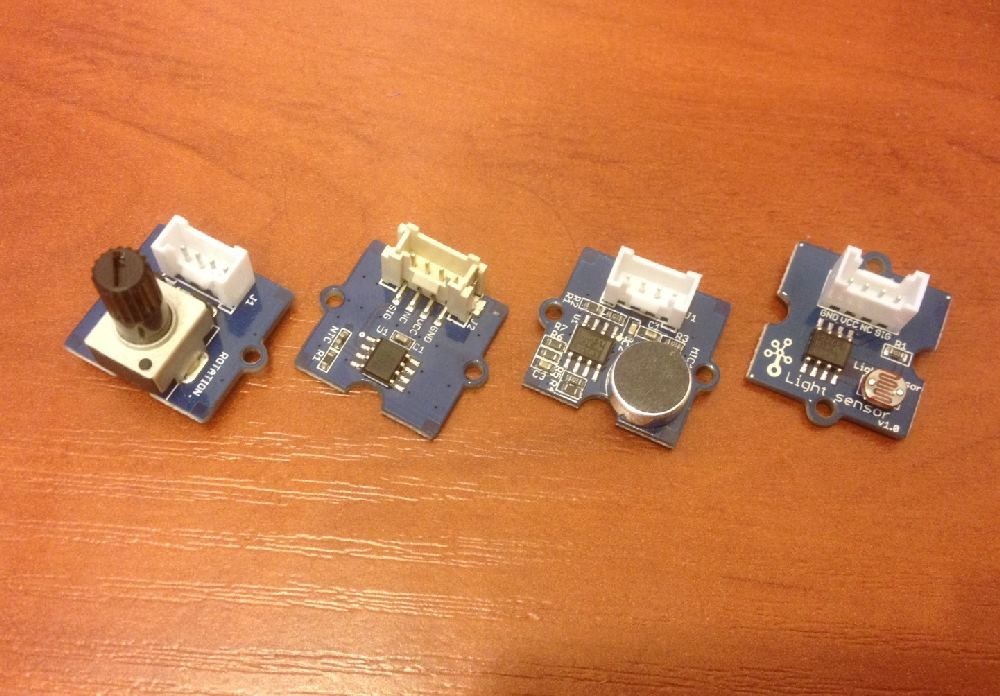
- 回転センサー。
- 温度計
- マイク
- 光センサー。
- サーボドライブ。
- LCDスクリーン。
- コネクタ付きワイヤ。
- USBコネクタ
- Kroneバッテリー用のコネクター。
もちろん、センサーを購入して自分で接続することもできます。 はい、安くなりますが、ここではすべてのコネクタが標準であり、すべてのワイヤがすでに利用可能です。 はんだ付けに怖がってはならない私にとっても、コネクタを貼り付けて、どこに配線があるかではなく、プログラム自体について考える方がはるかに楽しいです。 さらに、 ハッカソンでは、デモの前にセンサーを急いで接続し、ワイヤーを混同し、センサー出力に電力を供給していた状況がありました。 幸いなことに、何も燃え尽きていません。
Intel XDK IoT Edition開発環境
Intel XDK開発環境を使用すると、Node.jsでJavaScriptアプリケーションを作成し、Intel EdisonおよびIntel Galileoボードで実行できます。 これにより、以前は主にWeb用のJavaScriptを作成した開発者が新しいことを試すことができます。 利点は、以前に、マイクロコントローラ用に書くためにC / C ++を知っていなければならなかった場合、すべてがはるかに簡単になることです。 お気に入りのJavaScriptでプログラムを記述するだけで、すべてが機能します。
JavaScriptで記述されたアプリケーションは、C ++では同じ速度で劣ることがあります。 しかし、実際には、コードの記述が簡単になり、はい、ハードウェアは強力になりました。 Intel XDKのもう1つの利点は、関連するすべてのライブラリとファイルを含むボード上のアプリケーションをダウンロードして起動するには、いくつかのボタンを押すことで実行できることです。
再び、ハッカソンの例を挙げます。 チームの1人は、プロジェクトの実装に長い間苦しんだと言いました。 PythonとC ++の両方で動作するようにしようとしました。 しかし、JavaScriptに切り替えることで初めて成功しました。
開発中にあった困難
XDKがEdisonに接続できない場合がありました。 この場合、ボードはシリアルポートで動作しました(USB経由のエミュレーション)。 ボード上でWiFiが機能しないことが確認されました。 ボードのファームウェアバージョンにバグがあることがわかりました。 D7コネクタを使用すると、Wi-Fiの動作が不十分になります。 その後、ボードを正常に動作させるのは非常に問題です。 ボードが再起動すると、プログラムが自動的に起動するためです。 シリアルポートエミュレーションでUSBに接続するだけで決定しました。 接続したら、D7にアクセスしてボードを再起動しないようにプログラムを修正しました。
ここに問題の説明があります
https://github.com/intel-iot-devkit/mraa/blob/master/docs/edison.md-WiFiを使用している場合、Arduinoピン7がWiFi機能に悪影響を与える場合があります。
この問題は最新リリースで修正されています。
http://download.intel.com/support/edison/sb/edison_rn_332032009.pdf
解決された問題:
EDISON-2356 Arduinoのピン7を出力に設定すると、Wi-Fi接続が不安定になります。
この問題は最新リリースで修正されています。
http://download.intel.com/support/edison/sb/edison_rn_332032009.pdf
解決された問題:
EDISON-2356 Arduinoのピン7を出力に設定すると、Wi-Fi接続が不安定になります。
ボード接続
すでにIntel EdisonボードをUSBまたはWiFi経由でコンピューターに接続していると思います。 そうでない場合、いくつかの方法があります。 USB経由でシリアルポートのエミュレーションを有効にできます。これは極端なmicroUSBコネクタです。 USB経由でネットワークインターフェイスエミュレーションを有効にできます。これは、平均的なmicroUSBコネクタです。 WiFiを使用できます。 電源はUSBまたは電源を使用して接続できます。
- Wi-Fiを使用してIntel Edisonボードを接続する
- Ethernet over USBを使用してIntel Edisonボードに接続する
- Windowsを搭載したシステムでのシリアル端末のセットアップ
- Mac * OS Xを搭載したシステムでシリアル端末をセットアップする
- Linuxを使用するシステムでのシリアル端末のセットアップ
MRAAライブラリ
JavaScriptのセンサーでの作業を簡素化するために、特別なライブラリがあります。 それらの1つはMRAAです。 ボードでの作業レベルはかなり低くなります。
http://iotdk.intel.com/docs/master/mraa/index.html-MRAAドキュメント
その主なタスクは、入力または出力用のピンを構成し、0または1を発行し、接点からデジタルまたはアナログ信号の値を読み取ることです。 PWM(PWM)モードで動作するようにピンを構成し、そのパラメーターを設定できます。 これは、LEDを点滅させ、ボタンの状態を読み取り、センサーから温度値を取得し、サーボをオンにするのに十分です。
ここで、たとえば、ボードに組み込まれたLEDをオンにするプログラム:
var mraa = require('mraa'); var myOnboardLed = new mraa.Gpio(13); // 13- myOnboardLed.dir(mraa.DIR_OUT); // myOnboardLed.write(1); //
ただし、LCD画面など、より複雑なものを管理する必要がある場合は、これで十分ではありません。
UPMライブラリ
次のライブラリはUPMです。 より高いレベルの作業を提供します。
http://iotdk.intel.com/docs/master/upm/node/-Node.JSの UPMドキュメント
このライブラリは、スクリーン、サーボモーターなどの複雑なデバイスを制御するアルゴリズムを実装しています。それ以外の場合は、独立して実行する必要があります。 これを使用して、I2CシリアルバスのLCDスクリーンを制御します。
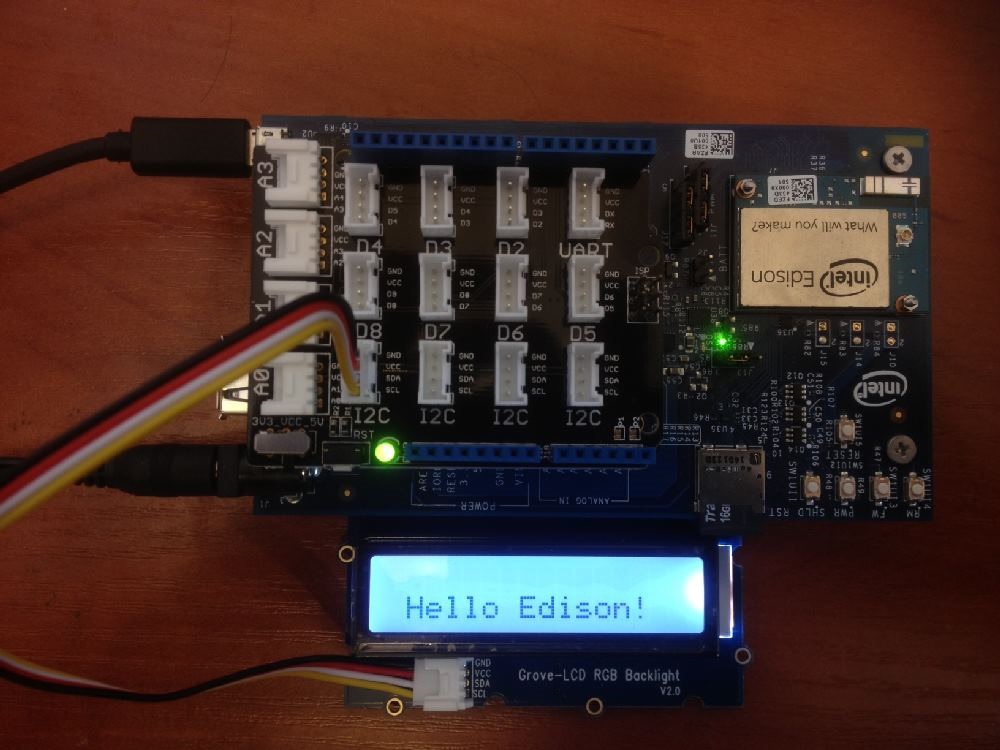
LCD画面にテキストを表示するプログラムの例:
var jsUpmI2cLcd = require ('jsupm_i2clcd'); var lcd = new jsUpmI2cLcd.Jhd1313m1(0, 0x3E, 0x62); lcd.setCursor(1,5); lcd.write('Hello Edison!');
作業Node.JS
コンピューター上のIntel XDKでアプリケーションを作成するとき、ボードにアップロードします([アップロード]ボタン)。 フォルダーに配置されますが、起動しません。 プロジェクトはボード上の/home/root/.node_app_slotフォルダーにあり、ルート/ node_app_slotからのリンクはこのフォルダーで構成されます。
ボードに送信されたアプリケーションは、2つの方法で起動できます。 または、[実行]ボタンを使用して開発環境から直接。 または、ボード上のコンソールで手動で、このために/ node_app_slotフォルダーに移動してコマンドを実行する必要があります
node main.js
Edisonボードを再起動すると、アプリケーションが自動的に起動します。 これを防ぐには、デーモンの起動をスタートアップから削除するか、main.jsファイルを削除または名前変更します。これは簡単です。
次に、接続の種類ごとに、Grove Starter Kit Plus(Intel IoT Edition)に付属するすべてのセンサーを検討します。
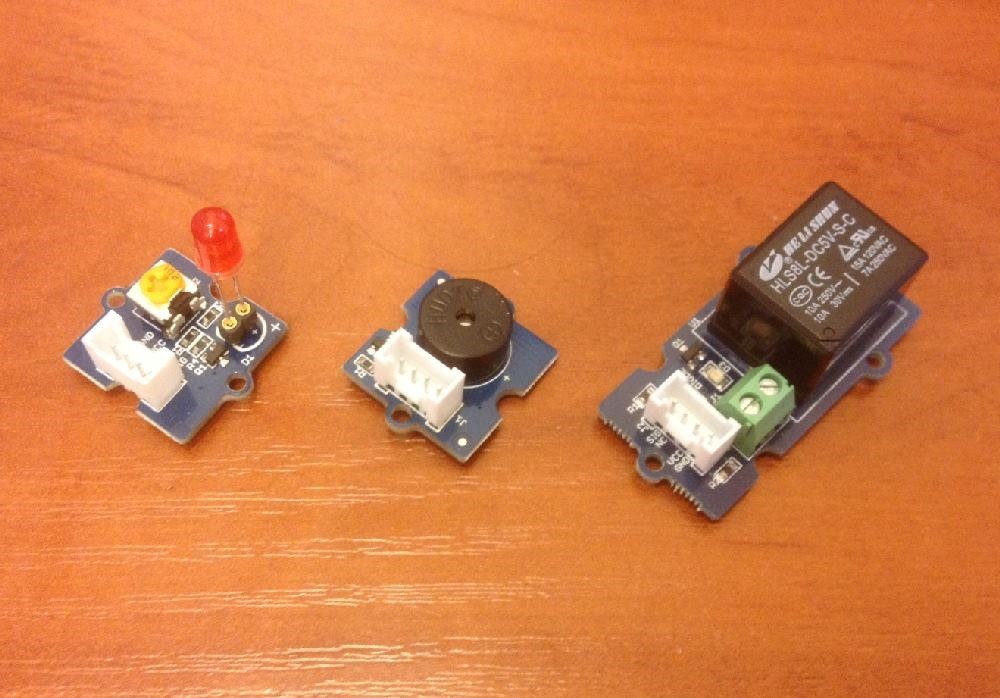
LED、ブザー、リレー
これらのデバイスはすべてデジタル出力に接続されています。 D2-D8を使用できます。 ユニットを供給すると、それらはオンになり、ゼロではオフになります。
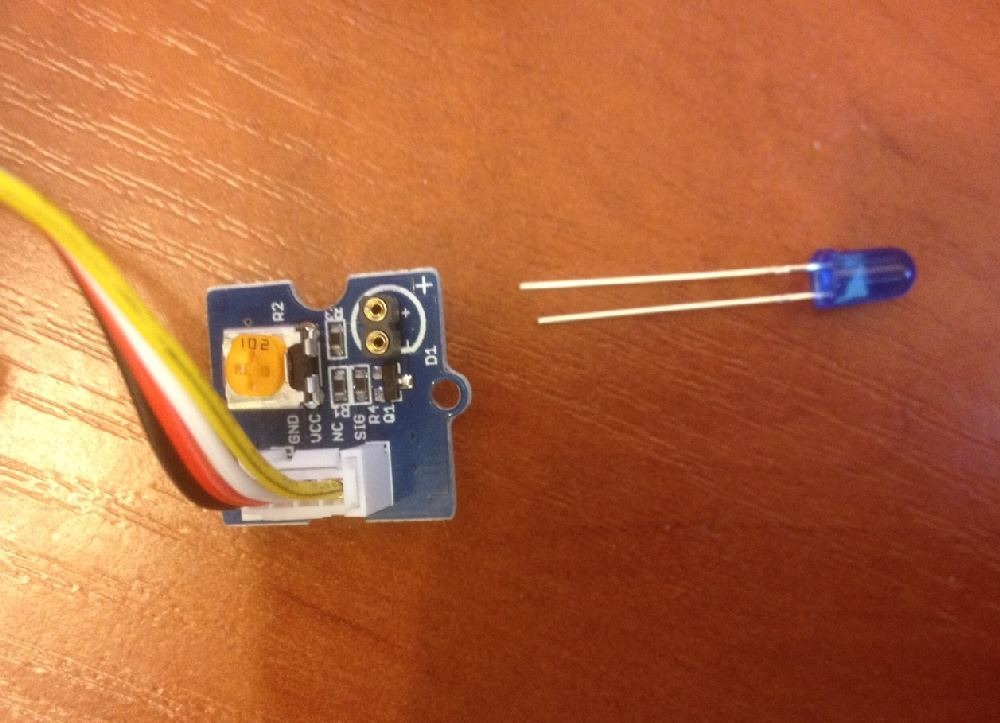
LED
キットには、赤、青、緑の3つのLEDがあります。 いずれかを選択します。 LEDデバイスは極性があるため、正しく接続することが重要です。 長い脚(アノード)が「+」記号の付いたコネクタに収まるように、LEDを挿入する必要があります。 しかし、間違った方法で差し込むと、光りません。
D2に接続して点滅します。
ソースコードmain.js
/*jslint node:true, vars:true, bitwise:true, unparam:true */ /*jshint unused:true */ // mraa var mraa = require('mraa'); // D2 var myOnboardLed = new mraa.Gpio(2); // myOnboardLed.dir(mraa.DIR_OUT); var ledState = true; // // 100 setInterval(periodicActivity,100); function periodicActivity() { myOnboardLed.write(ledState?1:0); // ledState = !ledState; // }
ブザー
ブザーまたはきしみ音。 電圧が印加されると、ある周波数できしみ始めます。 デジタル出力に接続します。 LEDの場合と同じようにコードを使用できます。
リレー
リレーは、信号によって制御されるスイッチです。 ユニットを供給するとき、回路ブレーカーは接点を閉じ、ゼロを供給するとき、それは開きます。 5Vを超える電圧および0.5Aを超える電流用に設計されたデバイスを制御するために使用できるため、外部電源に接続されます。 たとえば、電気スタンドをオンにすることができます。 Groveキットに付属のリレーには、10A x 250Vのパラメーターがあります。 これは2.5 kWです。 しかし、これが究極の力です。 このようにケトルをオンにしないでください。 220 Vの供給電圧でデバイスを切り替える場合は、最初に電圧自体が健康に危険であることに注意してください。次に、ボードに乗った場合、ほとんどの場合燃え尽きます。
PWMおよびLED輝度調整
しかし、ゼロと1だけでなく、中間レベルのアナログ信号を生成する場合はどうでしょうか。 または、2つの状態しかない場合にLEDを半分の明るさでオンにする方法は? これは、PWM-パルス幅変調(PWM)を使用して実現できます。 使用すると、信号は定期的に1から0に変わります。
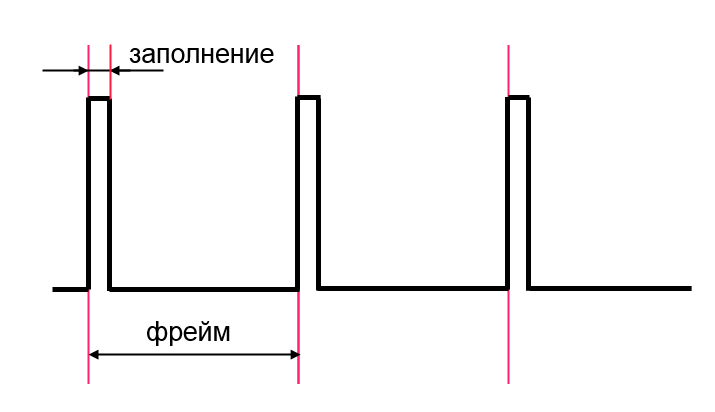
これはフレームごとに発生します。 両方のレベルの時間が同じ場合、平均で0.5の値を取得します。 単位が時間の25%であったと仮定すると、信号は同じで、最大値の0.25です。 このようにLEDを制御し、フレームを十分に小さく選択すると、視覚の慣性により、この平均輝度値が表示されます。
ボード上のデジタルコネクタの一部はPWMモードで動作でき、シールドではD3、D5、D6です。 (エジソンボード自体には、「〜」のマークが付いています。)
PWMを有効にするには、いくつかのパラメーターを設定する必要があります。 最初は、信号の繰り返し周期、つまりフレームのサイズです。 2番目のパラメーターは、ユニットが存在する時間です。 0〜1の係数として、またはマイクロ秒単位の時間の値として設定できます。
LEDが点滅し、徐々に明るさが変化する例を次に示します。
ソースコードmain.js
/*jslint node:true, vars:true, bitwise:true, unparam:true */ /*jshint unused:true */ var mraa = require("mraa"); var pwm3 = new mraa.Pwm(5); var frameSize = 2000; pwm3.enable(true); pwm3.period_us(frameSize); var value = 0; var step = 0.04; setInterval(proc, 20); function proc() { value += step; if( value < 0 ) { value = 0; step = -step; } else if( value > 1 ) { value = 1; step = -step; } pwm3.write(value); }
通常およびタッチボタン
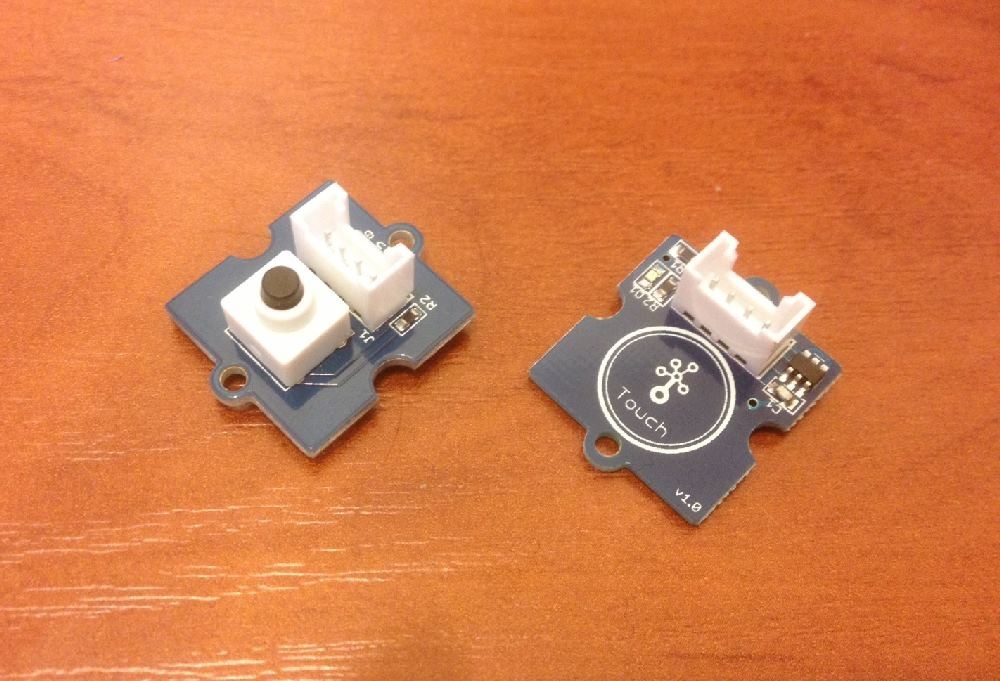
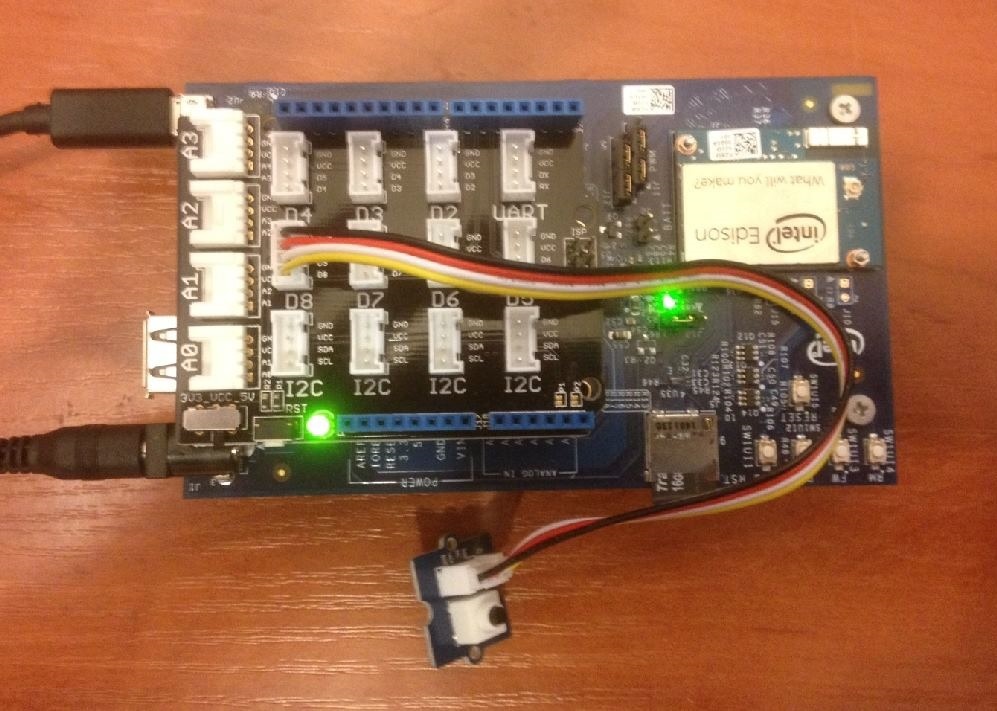
ボタンはデジタル入力D2〜D8に接続されています。 クリックされた場合、ユニットを発行します。 相互の違いは、タッチボタンが静電容量センサーであるため、軽いタッチで機能し、紙の層でも機能することです。
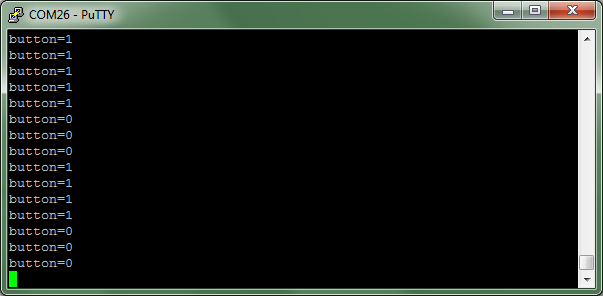
ボタンの状態を表示するアプリケーションを作成します。
ボタンをD8に接続します。
ソースコードmain.js
/*jslint node:true, vars:true, bitwise:true, unparam:true */ /*jshint unused:true */ var mraa = require('mraa'); // D8 var myButton = new mraa.Gpio(8); // myButton.dir(mraa.DIR_IN); // getButton(); // 20 function getButton() { var b = myButton.read(); console.log('button='+b); setTimeout(getButton,20); }
起動後にボタンを押すと、同様のものが表示されます。
回転センサー、温度計、マイク、光センサー
これらのセンサーはすべて、外部からの影響に応じて異なるレベルのアナログ信号を生成します。 アナログ入力A0〜A3に接続します。 シグナル値0-1023。
回転センサー
回転角度を返します。 値の範囲は0〜1023です。
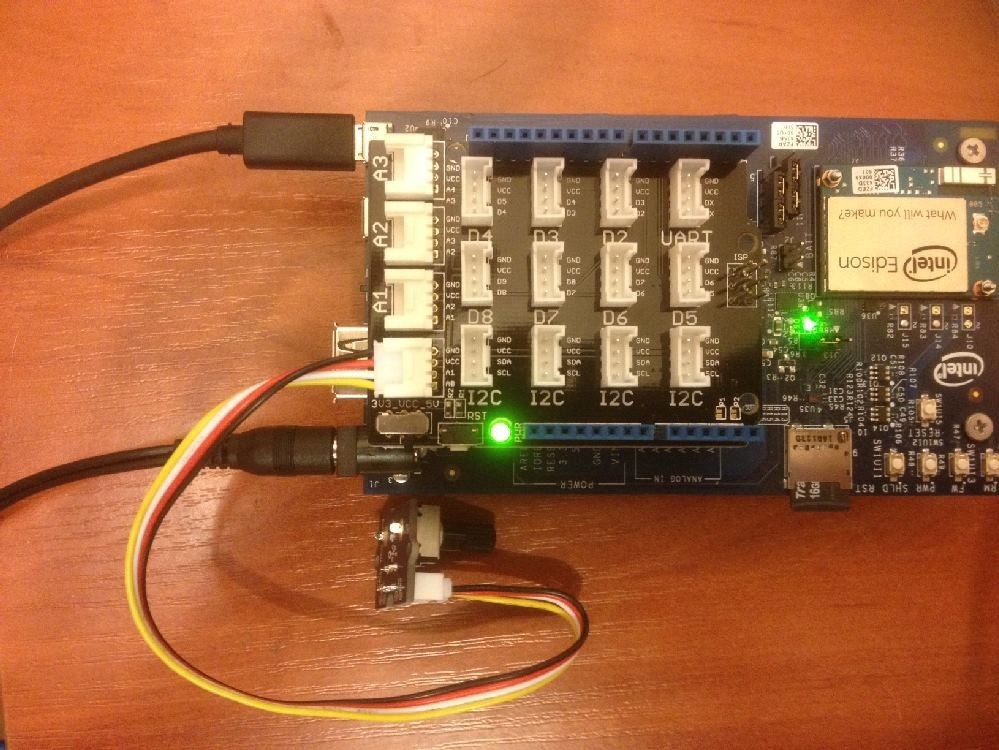
A0に接続します。
ソースコードmain.js
/*jslint node:true, vars:true, bitwise:true, unparam:true */ /*jshint unused:true */ var mraa = require('mraa'); //require mraa // A0 var myRotary = new mraa.Aio(0); getRotary(); function getRotary() { var b = myRotary.read(); console.log('rotary='+b); setTimeout(getRotary,20); }
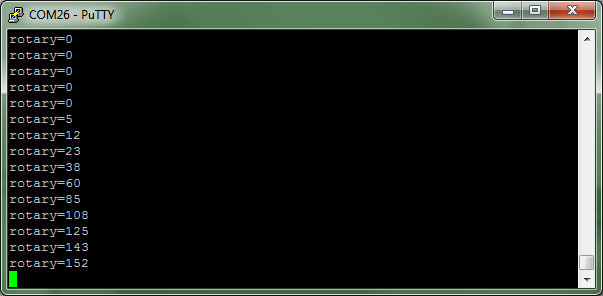
プログラムを起動してノブを回すと、次のように表示されます。
温度センサー
ご想像のとおり、温度値を返します。 ただし、値を読み取るだけでは十分ではありません。これはサーミスタの相対抵抗になるからです。 度に変換するには、UPMライブラリを使用することをお勧めします。 そのため、センサーをA0に接続します。
ソースコードmain.js
/*jslint node:true, vars:true, bitwise:true, unparam:true */ /*jshint unused:true */ var mraa = require('mraa'); var groveSensor = require('jsupm_grove'); // A0 var temp = new groveSensor.GroveTemp(0); setInterval(getTemp,100); function getTemp() { var celsius = temp.value(); console.log('temp='+celsius); }
ライブラリ関数は整数値のみを返します。 より正確な値が必要な場合は、センサーから直接値を使用する次のコードを使用できます。
ソースコードmain.js
/*jslint node:true, vars:true, bitwise:true, unparam:true */ /*jshint unused:true */ var mraa = require('mraa'); //require mraa var temp = new mraa.Aio(0); setInterval(getTemp,100); function getTemp() { var sens = temp.read(); var celsius = convertTemp(sens); console.log('temp='+celsius); } function convertTemp(sensorValue) { var resistance=(1023-sensorValue)*10000/sensorValue; // var temperature=1/(Math.log(resistance/10000)/3975+1/298.15)-273.15;//convert by datasheet ; return temperature; }
マイク
マイクから音が出ます。 A1に接続します。 値は、通常のアナログ入力の場合、0〜1023の範囲です。
ソースコードmain.js
/*jslint node:true, vars:true, bitwise:true, unparam:true */ /*jshint unused:true */ var mraa = require('mraa'); var myMic = new mraa.Aio(1); getLevel(); function getLevel() { var lev = myMic.read(); console.log('level='+lev); setTimeout(getLevel,20); }
サーボ駆動
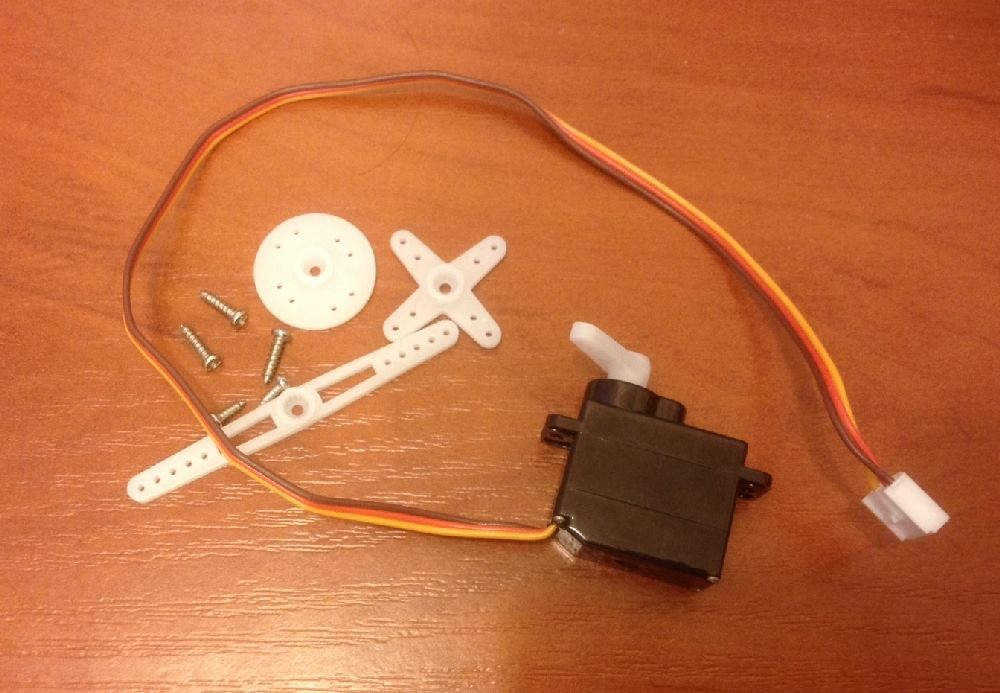
さらに興味深いのは、サーボドライブです。これは、所定の角度(0-180度)で回転し、この位置を維持しようとするモーターです。
角度を設定するには、特定の期間(デューティサイクル)のインパルスを適用する必要があります。 このようなパルスは、通常は1秒間に50回(20ミリ秒)連続して送られます。 しかし、到着期間はそれほど重要ではなく、期間は重要です。 500〜2000μsの範囲で指定できます。 インパルスの最小値では、0度の角度が設定され、最大値は180度に設定されます。
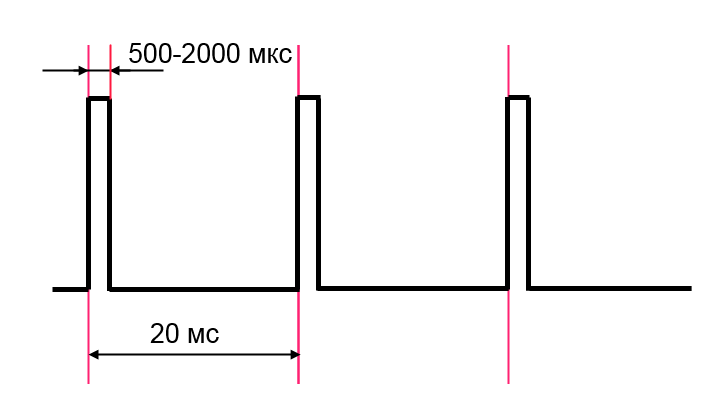
異なるサーボドライブでは、パルス幅の制限値が異なる場合があります。 これらは実験的に選択できます。 しかし、注意する必要があります。 持続時間の値が許容範囲外にある場合、サーボはノッキングを開始し、非常に熱くなります。 すぐにコネクタから取り外してください! 適切な操作で、彼は所定の角度を回して停止し、黙って冷たくしなければなりません。
PWM信号を出力できるデジタル出力を使用します。 これらはD3、D5、D6の結論です。
PWMは入力に256の値しか受け入れることができず、すべての値を使用して塗りつぶすことはできませんが、ごく一部しか使用できないという事実により、サーボにはそれほど多くの固定角度がないことがわかります。
ソースコードmain.js
var mraa = require('mraa'); // var frameSize = 20000; // D3 var pwm3 = new mraa.Pwm(3); pwm3.enable(true); pwm3.period_us(frameSize); // var minServoTime = 420; // var maxServoTime = 2000; // 0-1 var value = 0.5;// , 90 // var servoVal = Math.floor(minServoTime + (maxServoTime - minServoTime) * (1-value)); pwm3.pulsewidth_us(servoVal);
液晶画面

スクリーンデバイスはLEDよりも複雑なので、特別なシリアルI2Cバスに接続します。
各16文字の2行でテキストを表示できます。 RGBバックライトがあります。 ドキュメントには、英語と日本語がサポートされており、一定量のキャラクターを追加できることが記載されています。
デバイスはI2Cバスに並列に接続されているため、ボード上のすべてのコネクタは同等であり、画面はどのデバイスにも挿入できます。
UPMライブラリを使用します。
http://iotdk.intel.com/docs/master/upm/node/classes/jhd1313m1.html-この画面で作業します。
var jsUpmI2cLcd = require ('jsupm_i2clcd'); var lcd = new jsUpmI2cLcd.Jhd1313m1(0, 0x3E, 0x62); lcd.setColor(100, 127, 53); lcd.setCursor(1,1); lcd.write('Hello Edison!');
すべてをまとめる
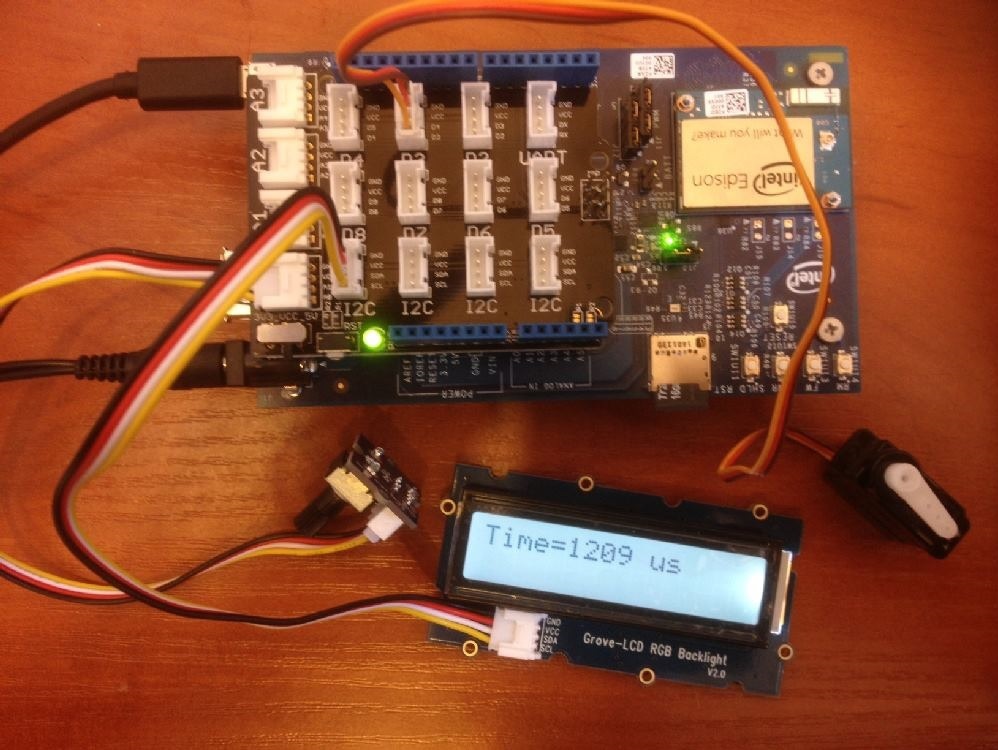
そこで、Grove Starter Kit Plusのセットに含まれるすべてのデバイスを確認しました。 複数のモジュールを同時に使用する、より興味深いものを収集してみましょう。
回転センサー(A0)があり、その回転中にサーボドライブ(D3)が適切な角度で回転します。 この角度で回転するために見つかったPWMパルス幅は、LCD画面(I2C)に表示されます。
ソースコードmain.js
/*jslint node:true, vars:true, bitwise:true, unparam:true */ /*jshint unused:true */ var mraa = require('mraa'); var jsUpmI2cLcd = require ('jsupm_i2clcd'); var lcd = new jsUpmI2cLcd.Jhd1313m1(0, 0x3E, 0x62); lcd.setColor(100, 127, 53); var myRotary = new mraa.Aio(0); var pwm3 = new mraa.Pwm(3); pwm3.enable(true); var frameSize = 20000; pwm3.period_us(frameSize); setInterval(proc, 100); function proc() { // var maxRotary = 1023; var valueRate = value / maxRotary ; // var minServoTime = 420; var maxServoTime = 2000; var servoVal = Math.floor(minServoTime + (maxServoTime - minServoTime)*valueRate); // pwm3.pulsewidth_us(servoVal); // lcd.setCursor(0,0); lcd.write('Time=' + servoVal + ' us '); }
Webサーバーの作成
IoT(モノのインターネット)の開発を検討しているため、インターネットを介してデバイスを操作できるようにする必要があります。 次の例では、温度センサーに現在の温度を表示するWebサーバーを作成します。 サーバーはポート1337でリッスンし、サイトルートへの要求に応答します。 温度センサーはA0に接続されています。 ボードのアドレスが192.168.0.105の場合、ブラウザで192.168.0.105:1337を指定します。
ソースコードmain.js
var mraa = require('mraa'); var groveSensor = require('jsupm_grove'); var temp = new groveSensor.GroveTemp(0); var lastSetVal = 0; var app = require('express')(); var http = require('http').Server(app); var url = require("url"); var numCalls = 0; app.get('', function (req, res) { 'use strict'; res.writeHead(200, {"Content-Type": "text/html"}); res.write('Intel Edison Sensor temperature ' + temp.value() + '<sup>o</sup>C'); res.end(); }); http.listen(1337, function () { 'use strict'; console.log('listening on *:1337'); });
作業例:
デザート-ブラウザーコントロール
だから、最初に約束した。 サーボドライブと画面上の矢印を使用して、ブラウザー制御のデバイスを作成します。 また、クライアントからの各回転コマンドでは、極端な位置では回転が発生しないため、設定値がJSON形式で返されます。 また、ちょっとしたボーナスとして、テキストを接続されたLCDスクリーンに送信できます。
プログラムは2つの部分で構成されています。 それらの1つはEdisonデバイスにあります。 これはWebサーバーのファイルmain.jsです。 クライアントからのリクエストに応答し、サーボとスクリーンを提供します。 ExpressおよびHTTPライブラリを使用します。
2番目の部分は、ブラウザーのクライアントにあります。 彼女はユーザーからコマンドを受け取り、サーバーに送信します。 JSON形式でWebサーバーからデータを受信して表示します。 jQueryライブラリを使用します。
このアプリはもう少し複雑になります。 プロジェクトで、パブリックフォルダーを作成し、その中に静的コンテンツを配置します。 私たちの場合、これらはボタンの3つの画像です-rotate_ccw.png、rotate_cw.png、rotate_center.png、htmlファイルindex.html、これはクライアントのブラウザに表示され、jquery-1.11.3.min.jsライブラリ(ダウンロードする必要があります)公式サイトjquery.com/download )

クライアントでは、スクリプトは矢印画像のクリックを監視し、そのようなイベントが発生すると、対応するアドレス/右、/左、/センターのサーバーにリクエストを送信し、矢印の位置に関する情報を含むJSONデータを受信することを期待します。 「テキストの設定」ボタンをクリックすると、入力フィールドのテキストがサーバーに送信されます。
Index.htmlファイルの内容
<html><body> <title>Rotation</title> <script src="jquery-1.11.3.min.js"></script> <script> function showVal(val) { $("#val").text('Value='+val); } function left() { $.getJSON( "/left", function( data ) { showVal(data['value']); } ) ; } function right() { $.getJSON( "/right", function( data ) { showVal(data['value']); } ); } function center() { $.getJSON( "/center", function( data ) { showVal(data['value']); } ); } function setText() { $.get("/text/"+$("#text").val()); } </script> <a onclick="left();"> <img src="rotate_ccw.png"/> </a> <a onclick="center();"> <img src="rotate_center.png"/> </a> <a onclick="right();"> <img src="rotate_cw.png"/> </a> <br/> <h1 id="val">Value=0</h1> <input id="text" type="text" name="data" value=""> <input type="submit" value="Set text" onclick="setText();" /> </body></html>
ボードでは、画面がI2Cに接続されています。 サーボはD3に接続されています。 サーバーはポート1337でリッスンします。 アプリケーションは、/右への呼び出しを待っています。 このリクエストでは、可能であれば、右へのターンが実行され、矢印の位置に関する情報とともにレスポンスがJSON形式で送信されます。 / leftおよび/ centerへの呼び出しも同様に処理されます。 / text / abcdefのようなプロンプトが表示されると、文字列abcdefがLCD画面に表示されます。 サーボドライブとスクリーンの操作については、前に説明しました。
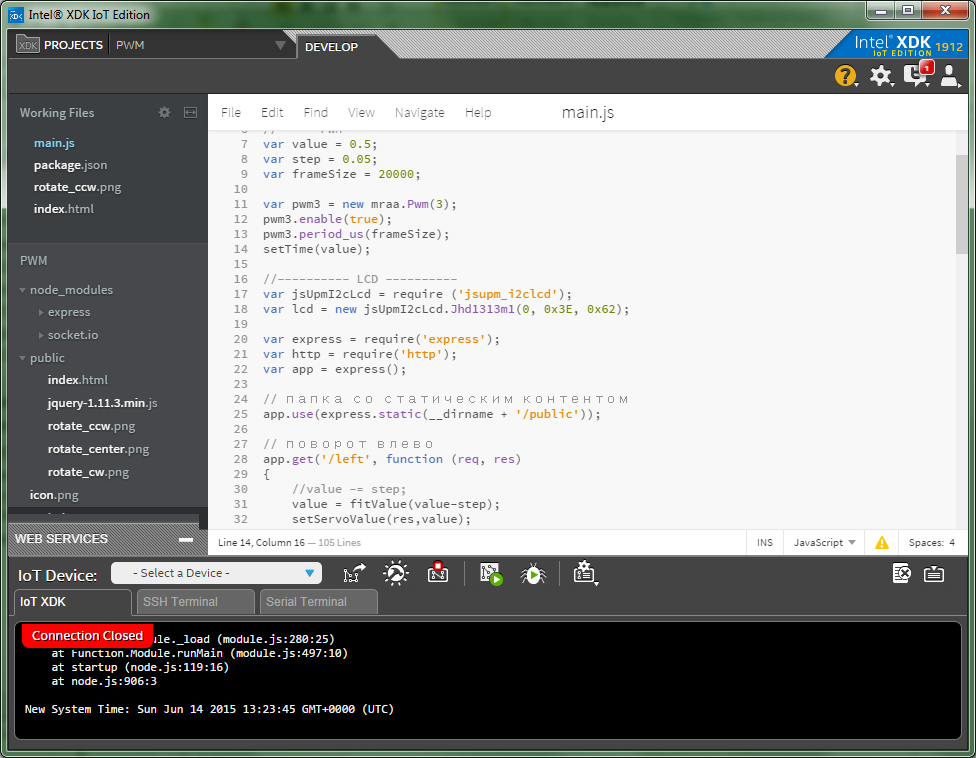
Main.jsコンテンツ
var mraa = require('mraa'); //----- PWM ----- var value = 0.5; var step = 0.05; var frameSize = 20000; var pwm3 = new mraa.Pwm(3); pwm3.enable(true); pwm3.period_us(frameSize); setTime(value); //---------- LCD ---------- var jsUpmI2cLcd = require ('jsupm_i2clcd'); var lcd = new jsUpmI2cLcd.Jhd1313m1(0, 0x3E, 0x62); var express = require('express'); var http = require('http'); var app = express(); // app.use(express.static(__dirname + '/public')); // app.get('/left', function (req, res) { value = fitValue(value-step); setServoValue(res,value); }); // app.get('/right', function (req, res) { value = fitValue(value+step); setServoValue(res,value); }); // app.get('/center', function (req, res) { value = 0.5; setServoValue(res,value); }); // LCD app.get('/text/:text', function (req, res) { var text = req.params.text; var t = text.toString().substring(0, 16); var vs = t + ' '.substring(0,16-t.length); lcd.setCursor(0,0); lcd.write(vs); console.log('value='+vs+'='); res.writeHead(200, {"Content-Type": "text/html"}); res.end(); }); // http.createServer(app).listen(1337); // JSON function setServoValue(res,v) { res.writeHead(200, {"Content-Type": "text/json"}); var text = '{"value":"'+value.toFixed(2)+'"}'; res.write(text); console.log(text); setTime(value); res.end(); } // function setTime(valueRate) { var minServoTime = 420; var maxServoTime = 2000; var servoVal = Math.floor(minServoTime + (maxServoTime - minServoTime)*(1-valueRate)); pwm3.pulsewidth_us(servoVal); } // function fitValue(v) { if( v > 1 ) { v = 1; } if( v < 0 ) { v = 0; } return v; }
Package.jsonコンテンツ
{ "name": "PWM", "description": "", "version": "0.0.0", "main": "main.js", "engines": { "node": ">=0.10.0" }, "dependencies": { "express" : "latest", "http" : "latest" } }
画像rotate_ccw.png

画像rotate_cw.png

画像rotate_center.png

それだけです。 起動して確認します。
悪魔Node.JS
Intel Edisonボードでデーモンがどのように機能するかについてのいくつかの言葉。
システムはxdk-daemonデーモンを実行します。 コマンドで停止した場合:
systemctl stop xdk-daemon
作業中のNode.JSアプリケーションは停止します。 次のコマンドで再起動できます:
systemctl start xdk-daemon
または再起動:
systemctl restart xdk-daemon
プログラムはボード上で直接編集することもできます(vi)。変更後は必ず再起動してください。 または:
systemctl restart xdk-daemon
または、コマンドを使用してコンソールでプログラムを起動した場合:
cd /node_app_slot node main.js
その後、<Ctrl> + <C>で停止できます
役に立つ
» Advanced Audio Distribution Profile(A2DP)を使用して、Bluetooth経由でIntel Edisonでオーディオを再生します
» OpenCV 3.0.0-rc1(IPPおよびTBBを使用)をIntel Edison Yoctoにインストールします。 OpenCVのUSBカメラ
» Intel Edison Boardを使用して、新しいツイートでOrbotix Spheroボールの色を変更する
» Bluetooth LE(BLE)を使用してAndroid経由でIntel Edisonに接続する