 既製のデバッグボードとそれらのための数千の既製のモジュールの時代では、いくつかのブロックを取り、それらを接続し、所望の結果を得るのに十分であり、誰もが回路の基本、理由と仕組み、そして最も重要なこと-それが機能する場合に何をすべきかを理解しているわけではありませんそうではありません。
既製のデバッグボードとそれらのための数千の既製のモジュールの時代では、いくつかのブロックを取り、それらを接続し、所望の結果を得るのに十分であり、誰もが回路の基本、理由と仕組み、そして最も重要なこと-それが機能する場合に何をすべきかを理解しているわけではありませんそうではありません。
BufordがRabid Dog Tannenに言ったように、回路のハブを開いたところです。
裁判所はすでに建設中であるため、誰かを掛ける時が来ました。
このシリーズでは、特定のオブジェクトまたはそれらの制御システムの重要な要素として、センサーについて説明します。 プロセス。
マイクロコントローラに基づいたデジタル制御システムの実装の実際的な問題に関するすべての物語を実施します。
経営陣は普遍的な問題であると主張していません。
私の大要が20ページ以上のテキストを超えた後、記事を次の部分に分割することにしました。
- パート1.マット。 一部。 その中で、特定の測定パラメータに関連付けられていないセンサーを検討します。 センサーの伝達関数と動的特性を考慮し、可能な接続を扱います。
- パート2.気候制御センサー 。 その中で、温度、湿度、圧力、およびガス組成センサーを操作する機能を検討します
- パート3.電気量のセンサー。 その中で、電流と電圧の測定に触れます
はじめに
技術設備の制御システムで、温度、湿度、圧力、液体レベル、電圧、電流などの特定の値の現在の読み取り値を取得する センサーを使用して実行-外部信号を制御システムが理解できる形式に変換するように設計されたデバイスとメカニズム。 たとえば、湿度センサーは、空気の湿度の現在値に比例する電気信号を生成します。
原則として、センサーは単独では使用されませんが、フィードバック信号を提供する制御システムの一部です。
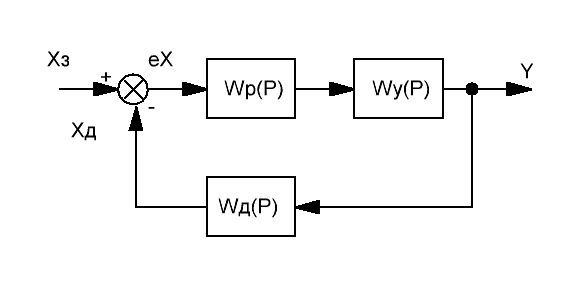
図1.典型的な閉ループ制御システム
図1は、規制システムの典型的なスキームを示しています。 伝達関数Wd(p)を持つセンサーを使用して得られた出力信号と比較される基準信号X3があります。 制御誤差はコントローラーに送られ、コントローラーは作動ユニットの制御信号を生成し、出力信号Yを形成します。 [1]
簡単な例は、遠心エンジン速度コントローラーです。センサーはボールのあるプラットフォームであり、回転することで、燃料レールのこの位置またはその位置を設定します。 このレールで制御されるダンパーは、エンジンに供給される燃料の量を調整します。 基準信号は希望の速度値になります。
1.1センサーの分類
センサーの分類は非常に多様です。 [4]から進んで、その一部のみを提供します。
すべてのセンサーは、2つの主要なクラスに分類されます。
- パッシブ。外部の電源を必要とせず、入力の影響に応じて電気信号を生成します。 このようなセンサーの例は、熱電対、フォトダイオード、および圧電センサーです。
- アクティブ。動作には励起信号と呼ばれる外部信号が必要です。 このようなセンサーは、外部信号の変化に応じて特性が変化するため、パラメトリックと呼ばれます。 アクティブセンサーの例としては、サーミスタがあります。サーミスタの抵抗は、電流を流すことで計算できます。
文献では、ジェネレータセンサーがアクティブ、パラメトリック-パッシブとして定義されている場合、代替の分類オプションがあることに注意してください。 以下、Faridenのガイドに従ってオプションをガイドします。
もう1つの重要な基準は、データ参照ポイントの選択です。 したがって、センサーがあります
- 絶対、物理量の測定値は、測定条件と外部環境に依存しません。
- 相対的で、そのようなセンサーの出力信号がそれぞれの場合に異なって解釈される場合。
ここでも鮮明な例は、抵抗が測定対象の温度のみに直接依存するサーミスタと、出力電圧が高温端と低温端の温度差に依存する熱電対です。
電子機器を開発する場合、出力信号の性質もセンサーの特性における重要な要素です。
- 出力のアナログセンサーには連続出力信号があります。そのためには、A / Dコンバーターを使用する必要があります。その後、ADC値を測定値の形式に変換する必要があります。
- さまざまなデジタルインターフェイスを使用してキャプチャされる情報からのデジタルセンサー。 原則として、情報は測定値の形式で直接利用でき、追加の変換は必要ありません。
- センサーチャネルの出力に2つの信号オプション(log 0.およびlog)のみを持つ離散センサー。 このようなセンサーの例は、閉じた状態と開いた状態のリミットスイッチです。 ディスクリートセンサーには複数の出力チャネルがあり、各出力チャネルは2つの状態のいずれかになります。 たとえば、12ビットの絶対位置センサー。
- 出力信号のパルスを生成するパルスセンサー。その振幅または持続時間は測定値に依存します。 たとえば、インクリメンタルエンコーダーは出力でグレイコードを生成します。 この場合、センサーのシャフトの速度が高いほど、出力の信号の周波数が高くなり、シャフトの速度を高精度で決定できます。
2センサー仕様
ほとんどのセンサーには、測定値を電気信号に変換するための複雑な手順があります。 たとえば、ひずみゲージ式圧力センサーでは、測定値が検出素子に作用し、その抵抗が変化します。 励起信号を印加した後、抵抗器の電圧降下により、抵抗値を間接的に決定し、抵抗値の圧力依存性に基づいて、測定値を計算できます。
開発者にとって、センサーは入力と出力の間の既知の信号比を持つブラックボックスです。
2.1測定値と出力値の範囲
測定値の範囲は 、確立された誤差を超えることなく、センサーが出力電気信号に変換できる入力信号の最大値を示します。 これらの数値は常にセンサーの仕様に記載されていると同時に、特定の範囲で可能な測定精度を表示します。
最大値を超える入力信号を送信すると、一部のセンサーが飽和状態になり、誤ったデータが返されることを理解してください。 他のセンサー(温度センサーなど)が故障する場合があります。 将来的には、センサーの種類ごとに推奨事項が提供されます。
センサーの出力値の範囲は 、最小および最大の外部衝撃でセンサーが出力できる最小および最大電圧です。 入力信号を電気に変換するセンサーを検討しているため、センサーの出力値の範囲は、生成する電圧または通過する電流で決定されます。 センサーを接続する際のタスクの1つは、センサーの出力範囲を測定パスの入力範囲と一致させることです。
2.2伝達関数-静的および動的特性
センサーを使用する場合、入力と出力での信号レベルの比率を知る必要があります。 演算子形式の比率Wd(p)= Y(p)/ X(p)はセンサーの伝達関数であり、静力学および力学におけるセンサーの特性を一意に決定します。
方程式Y(p)= Wd(p)* X(p)は、実際の平面、つまり 関数Y = f(x)は静的特性になります
静的特性は線形であり、次のように定義されます。
 (1)
(1)
ここで、aはセンサーの感度によって決定される直線の傾きであり、bは定数成分(つまり、入力に信号がない場合の出力信号のレベル)です。

図2.線形依存性
線形依存性のセンサーに加えて、対数依存性のセンサーがあり、次の形式の方程式があります。
 (2)
(2)
指数:
 (3)
(3)
または電源:
 (4)
(4)
ここで、 kは定数です。
より複雑な特性を持つセンサーがあります。 しかし、ドキュメントがあります。
ただし、伝達関数は、センサーがダイナミクスにどのような特性を持っているか、つまり、入力値が急速に変化したときにセンサーが出力信号をどれだけ迅速かつ正確に処理するかを明らかにします。 ほぼすべての実際のセンサーには、コンデンサ、質量などのエネルギー貯蔵デバイスがあります。センサーの動作を考えてください。その動的特性は、一次方程式で記述されます。
 (5)
(5)
自動制御理論では、2つのテスト入力信号があります。 これは単一の関数です-ゼロ時間で単位を与え、デルタ関数-無限の振幅と無限に短い持続時間の信号を与えます。

図3.ユニットおよびデルタ関数
無慣性、つまり理想的なセンサーは入力信号の形状を正確に繰り返します。 式(5)で表される実際のセンサーは、次の反応を示します。

図4.テスト信号に対する1次非周期的リンクの反応
センサーの出力の値は、過渡プロセスの終了後にのみ入力で与えられる値に対応することに注意してください。これは3〜4τ持続します。ここで、 τはリンクの時定数です。 t =1τで、出力値は

t =2τで出力値が86%になり、 t =3τ -95%で移行プロセスが完了したと見なされることは簡単に計算できます。
したがって、たとえば、同じ温度センサーは、センサーと環境の間に熱を吸収して加熱しなければならないハウジングがあるという事実により、周囲温度の変化にある程度の遅れで応答することを理解する必要があります。 時間がかかります。
もちろん、慣性センサーは、より複雑な方程式で記述することができます。たとえば、2次の非周期的なリンクとして現れる、反応遅延などがあります。そのようなリンクの動作の特徴は、[1]で詳しく説明します。
2.3精度、非直線性
センサーの重要な特性の1つは、測定値の範囲での精度です。 センサーの出力信号は、エラーと呼ばれるある程度の確実性を持つ測定値の値に対応します。
たとえば、温度センサーの精度は±2度です。 つまり、測定対象物の実際の温度が100度の場合、この温度センサーの許容読み取り値は98〜102度の範囲になります。
センサーエラーは異なる場合があります。
加法誤差と乗法誤差を区別します。
加算誤差は、測定範囲全体で一定です。
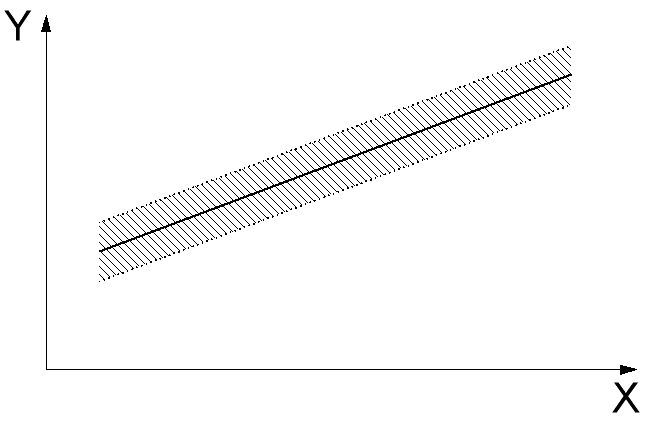
図5.加算エラー
乗法は、測定値のレベルに線形に依存します。
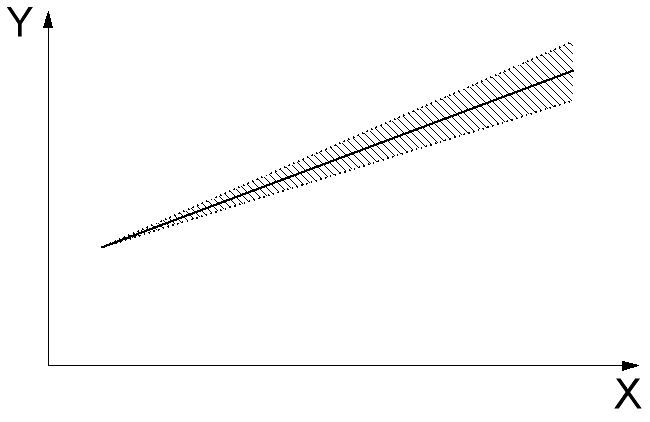
図6.乗法エラー
さらに、測定範囲内にセンサーの非直線性があります。 現在の測定範囲に応じて、伝達関数の勾配は特定の制限内で変化します。 同時に、範囲の精度変動曲線または1つまたは別の範囲の最悪の非直線性インジケータのいずれかが仕様に示されています。
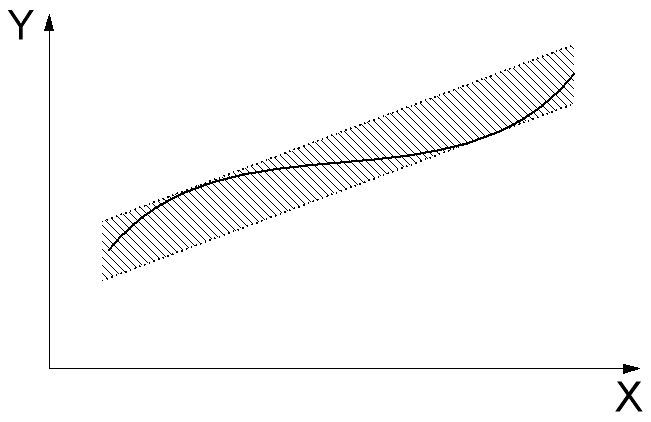
図7.センサーの非線形性
さらに、一部のセンサーにはヒステリシス効果があり、同じ入力信号に対して増減した後、出力信号の値は異なります。 ヒステリシスの一般的な原因は、摩擦と材料の構造変化です。 強磁性材料に基づくセンサーは、最大のヒステリシス効果を受けます。
精度を向上させ、加法的および乗法的エラーを補正するために、センサーのキャリブレーションプロセスを実行できます。 たとえば、リニアセンサーの場合、動作範囲の異なる端にある2つのポイントで読み取り値を決定することが、既知の精度で必要です。 一部のセンサーでは、特定のインスタンスごとにパスポートにキャリブレーションデータを提供できます。 キャリブレーション手順には、より正確な機器を使用できます。標準(黒体、基準キログラムなど)を使用できます。 キャリブレーション後の精度は、当然、標準の精度を超えることはできません。
2.4センサーの感度、解像度、および不感帯
センサーの不感帯は、特定の範囲の入力信号におけるセンサーの感度の低下です。 このゾーン内では、出力は正しくありません。
図2の例では、0〜x0のすべての値の出力値の読み取り値は定義されていません。 たとえば、このような機能では、たとえば10mA未満の電流でゼロの出力電圧を持つ電流センサーがあります。
範囲の残りの部分では、センサーの特定の感度が発生します。つまり、入力信号を変更するための出力信号の増加がどれほど強いかです。 つまり、感度は次の式で決定されます:
リニアセンサーの場合、感度は測定範囲全体で一定です。
分解能は、測定された量のわずかな変化が出力信号の変化を引き起こす可能性があることを示しています。 たとえば、一部のインクリメンタルエンコーダの解像度は1度です。 アナログセンサーの出力信号では、変化の個々の段階を判断することができないため、アナログセンサーの解像度は無限にあります。
3センサーの接続方法
センサーのタイプに応じて、さまざまな方法で測定経路に接続されます。
パッシブセンサー接続
外部の影響に反応する外部支援のないパッシブセンサーが独自に電気信号を生成するため、この信号を読み取る必要があります。
センサーが電流源であるか電圧源であるかに応じて、接続方法は異なります。
たとえば、熱電対は電圧源です。出力の電圧は、出力電流の大きさに依存しません(当然、妥当な範囲内です)。 私たちのタスクは、生成されたemfを測定することです。 測定パスには最終的な抵抗があるため、接続図は次のようになります。
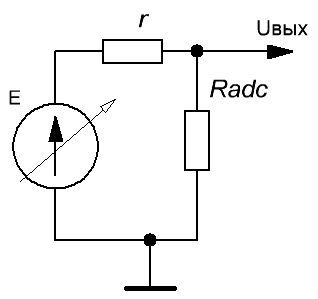
図8.電圧源をADCに接続する
Radcが内部抵抗rよりもはるかに大きい場合、その両端の電圧降下はゼロになる傾向があり、ADC入力の電圧はEMF値になる傾向があります。
第2部では、最も正確で高速なセンサーの1つとして熱電対を詳細に検討します。
別のケースとして、センサーが電流源である場合、つまりセンサーが生成する電圧が負荷に流れる電流に依存する場合があります。
センサー接続は同様です:
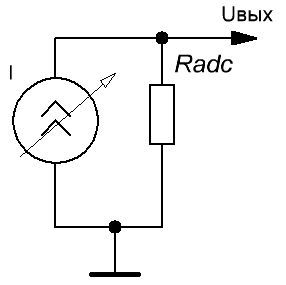
図9.電流源をADCに接続する
ただし、電流源の負荷抵抗はゼロになる傾向があります。 これを行うために、センサーは必要な抵抗の抵抗によってシャントされ、それによって電流源を電圧源に変えます:
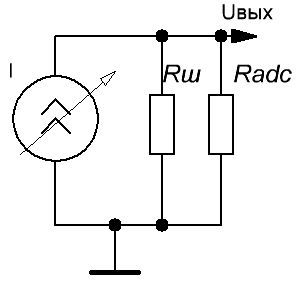
図10.電流源のADCへの正しい接続
抵抗Rの抵抗は 、ADC入力に供給される最大電圧をセンサーが出力できる最大電流で割った商として計算されます。
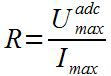
このようなセンサーの最も印象的な画像は、電流センサーです。
注意:電流源の形の等価回路を持つセンサーは、抵抗によってシャントされ、任意の小さな入力アクションが存在する場合にシャント回路を開かないようにする必要があります。 それ以外の場合、同じ電流センサーは、測定回路またはセンサー自体の故障前に、二次巻線の空いている端子にキロボルト単位の電圧を生成します。 最新の電流センサーは1 kV以上の電圧でテストされているため、出力で2〜3 kVを取得し、指でそれらを取得することは最も難しい作業ではありません。
アクティブセンサー接続
可変抵抗であるアクティブセンサーを検討してください。 特に、これらはサーミスタ、ひずみゲージ、および他の同様のセンサーです。 センサーの抵抗を測定するには、センサーを電流源に接続して、電圧降下を測定する必要があります。
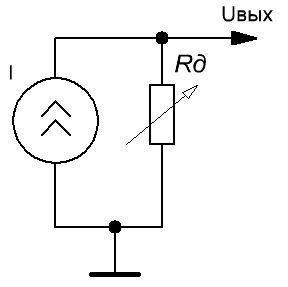
図11.調整されていない電流源へのセンサーの接続
電流源は、既知の大きさの定電流を生成します。 次に、出力電圧は次の式で決定されます。
 (7)
(7)
たとえば、センサーが抵抗を0.1 kOhmから1 kOhmに変更した場合、10 mAのソース電流での出力電圧値を計算します。 その後、最大出力電圧は等しくなります
 (8)
(8)
これは、オペアンプに基づくアナログ制御システムに必要な電圧値と一致しています。
現在のソースはどこで入手できますか? マイクロコントローラ自体に組み込まれていることがあります。 たとえば、ADuCM360 / 361マイクロコントローラーには、2つの内蔵0.01-1mA電流源があります。 確かに、そこには診断タスクがあります-センサー回路に小さな電流を供給することにより、その存在と保守性を確信できます。
もちろん、分圧器を備えた電圧源を使用することに慣れています。

図12.分圧器でセンサーを電圧源に接続する
清潔さといえば、U-R1回路は同じ電流源を形成し、そのパラメーターのみが負荷-Rdに依存します 。 出力電圧は次の式で決定されます。
 (9)
(9)
そして、この方法の主な問題が浮上します-分母のセンサーの抵抗を取り除くことはできず、測定値は最初のオプションとは対照的に非線形になります。
疑問が生じる-R1の抵抗はどうあるべきか? 最大出力電圧範囲を提供する必要があります。 すなわち、センサーの最小および最大抵抗の既知の値Rd1およびRd2で 、 abs(Uout1-Uout2)-> max
一方、最大出力電圧は測定デバイスの入力回路によって制限されます。 たとえば、5Vの電源を備えたマイクロコントローラの入力では、たとえば2.5V以下の電圧を供給する必要があります。 ADC入力に供給される最大可能電圧が供給電圧よりも低い場合、そこで供給できます。
センサーで抵抗を0.1 kOhmから1 kOhmに変更する場合、抵抗R1の抵抗をセンサーの抵抗の上限に等しくします。 その場合、Uoutは1 / 11Uinから1 / 2Uinまで変化します。 この例の絶対値では-0.45〜2.5Vです。 そして、これらの値を使用して、(2.5-0.45)/ 2.5 = ADC範囲全体の82%を使用しますが、これはかなり良好です。
センサーを測定ブリッジに貼り付けて、肩の電圧差を測定することもできます。
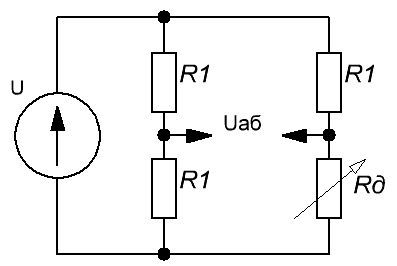
図13.測定ブリッジのセンサー
この場合、電位差Uabを測定することにより、差動ADCを使用します。 以下と等しくなります。
 (10)
(10)
さらに、抵抗器R1の抵抗値は、 Uabが負になるようにすることができる。 センサーがあり、その内部回路はすでに必要な特性を備えた平衡ブリッジです。 後で、そのようなセンサーの例を見ていきます。
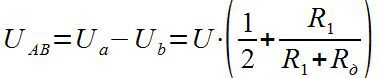
使用するより便利なセンサーがあります。 彼らは抵抗器で踊ることなく必要なアナログ信号を与えます。 たとえば、アナログ湿度センサーHIH-4010-004-3ピンハウジング、5V電源、リニア出力。 この奇跡は次のようにつながっています。
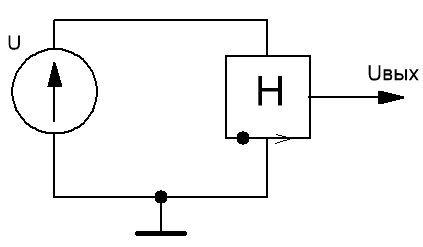
図14. HIH-4010-004湿度センサーの接続
基準電圧源への2本のワイヤ、マイクロコントローラのADCへの出力。
1-Wireデジタルセンサー接続
1-Wireは双方向の低速デジタルデータバスで、データワイヤとグランドの2本のワイヤのみが必要です。 バスは非常に使いやすく、ラインからのデバイスの寄生電源をサポートし、温度センサー(すべての愛用のDS18B20)や識別チップ(iButton)などの同じタイプのデバイスを多数並列に接続できます。
スプリアス栄養は次のように構成されています。
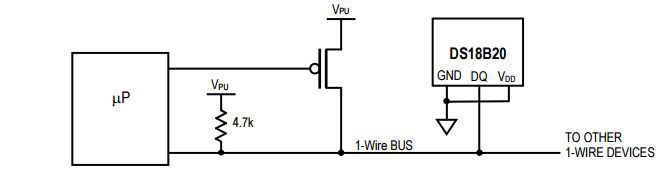
図15. 1-Wireバスデバイスのスプリアス電源
そして、これは、電源に近いときのデバイスの通常のアクティブな電源です。

図16.外部ソースから1-Wireデバイスに電力を供給する
並列に接続されたセンサーの数は、実際にはラインパラメーターによってのみ制限されます。
外出先でのホットプラグと識別が可能。 さらに、同定アルゴリズムO(log n)の計算の複雑さ
第2部では、このプロトコルを使用して詳細に作業します。
それまでの間、プロトコル自体については、 http : //datasheets.maximintegrated.com/en/ds/DS18B20.pdfのクラシックリンクを読むことができます。
I2C(Twi)/ SMBusデジタルセンサー接続
1-Wireに1本のデータワイヤが必要な場合、このバスは、Two-Wire Busの名前によると2本です。
ワイヤの1つ-SCLはクロッキングを行い、2番目のワイヤ-SDAはデータを半二重で送信します。
したがって、オープンコレクタバスであるため、両方のラインを電源に接続する必要があります。 センサーは次のように接続します。

図17. I2Cを介したセンサーの接続
I2Cバスに接続できるデバイスの総数は、7ビットアドレッシングを備えた112デバイスです。 実際、各デバイスには2つの連続したアドレスが割り当てられ、最下位ビットが読み取りまたは書き込みに設定されます。 バス容量には厳しい要件があります-400pF以下です。
一般的に使用される速度は100 kbit / sおよび10 kbit / sですが、最新の規格では400 kbit / sおよび3.4 mbit / sの速度モードも許可されています。
バスは、変更不可能なマスターとフラグの転送の両方で動作できます。
プロトコルに関する膨大な情報は、次のリンクから入手できます。http : //www.esacademy.com/en/library/technical-articles-and-documents/miscellaneous/i2c-bus.html
SPI規格に準拠したデジタルセンサーの接続
少なくとも3本のワイヤが必要で、全二重モードで動作します。 双方向の同時データ転送を編成します。
通信回線:
- CLKはクロックラインです。
- MOSI-マスター出力、スレーブ入力
- MISO-マスター入力、スレーブ出力
- CS-チップ選択(オプション)。
ウィザードによってデバイスの1つが選択されます。 バスのタイミングを担当します。 接続は横方向に実行されます。
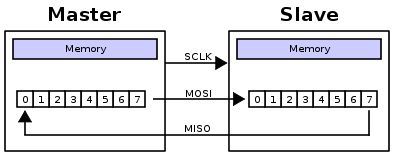
図18. SPI接続と転送の本質
回路内の各デバイスには、独自のシフトデータレジスタが含まれています。クロック信号の助けを借りて、8クロックサイクル後、レジスタの内容が交換され、データが交換されます。
SPI-提示された最速のデータ転送インターフェース。最大可能クロック周波数に応じて、データ転送速度は20、40、75 Mb / s以上になります。
SPIバスを使用すると、デバイスを並列に接続できますが、問題があります-各デバイスにはプロセッサへの独自のCSラインが必要です。これにより、単一のインターフェイス上のデバイスの総数が制限されます。
SPIを設定する際の主な困難は、クロック信号の極性を設定することです。真剣に。 SPIの設定は簡単ではありませんが、非常に簡単です。
AVRおよびMSP430用の周辺モジュールSPIの説明とともに、SPIについて簡潔かつ明確に読むことができます。http://www.gaw.ru/html.cgi/txt/interface/spi/index.htm
4センサーからの読み取り
センサーから少なくともいくつかの情報を読む時間です。
センサーの接続方法とそのタイプに応じて、さまざまな読み取り方法が可能です。デジタルセンサーやガス組成センサーなどの一部のセンサーでは、測定モードの予備起動が必要なことに注意してください。
したがって、測定プロセスは、データ測定サイクルとデータ取得サイクルの2つのクロックサイクルで構成されます。次のいずれかに行くことができる番組編成に

図19のプロセスの読み出しセンサ
個別の実施形態を考えるとスケルトンをスケッチ:
オプション1測定モードを開始すると考え待っ。
このオプションはシンプルで魅力的ですが、その背後に問題があります-測定が行われるのを待っている間、マイクロコントローラはタスクを実行せずに大胆にアイドル状態になります。ほとんどの自動化システムでは、このモードは容認できない贅沢です。
コードでは、次のようになります。
Sensor.Start();// delay(MINIMAL_SENSOR_DELAY_TIME);// int var = Sensor.Read();//
オプション2 測定モードを開始し、他のタスクに戻り、時間の経過後に割り込みが機能し、データを読み取りました。
最高のオプションの1つ。 しかし、最も難しいのは:
void Setup(){ TimerIsr.Setup(MINIMAL_SENSOR_DELAY_TIME);// int mode = START;// Sensor.Start();// } TimerIsr.Vector(){// if (mode == START{ mode = READ; var = Sensor.Read();// , } else { mode = START; Sensor.Start();/// , } }
よさそうだ。 測定サイクルと読み取りサイクルの間で時間を変えることができます。 たとえば、ガス組成センサーには、前回の測定後に冷却する時間があるか、測定中に暖機する時間が必要です。 これらは異なる期間です。
オプション3:データを読み取り、新しいラウンドを開始します。
データを読み取った後、センサーで新しい測定サイクルを開始できる場合は、そうではありません。反対のことを行います。
void Setup(){ TimerIsr.Setup(MINIMAL_SENSOR_DELAY_TIME);// Sensor.Start();// } TimerIsr.Vector(){// var = Sensor.Read();// Sensor.Start();///
時間を節約する素晴らしい方法。 そして、あなたは何を知っています-この方法は中断することなく正常に動作します。 デジタルセンサーは計算された値を電源がオフになるまで保存し、15秒の慣性により湿度センサーから信号を読み取る必要がないことが多いことを考慮して、これを行うこともできます。
void Setup(){ Sensor.Start();// while(1){ // var = Sensor.Read();// Sensor.Start();/// } }
センサーが新しい測定サイクルを独自に開始し、外部割り込みを使用して測定の完了を報告するオプションがあります。 たとえば、ADCはN Hzの周波数でデータを自動的に読み取るように構成できます。 一方で、割り込みハンドラーでは、新しいデータを読み取るプロセスのみを実装すれば十分です。 一方、ダイレクトメモリアクセス(DMA)モードでADC割り込みを使用することは可能です。 この場合、割り込み信号に従って、ハードウェアレベルのADC周辺モジュールは、RAMの特定のメモリ位置にデータを独立してコピーするため、最大のデータ処理速度と作業プログラムへの影響を最小限に抑えることができます(割り込みを行ったり、プロセッサを呼び出す必要はありません)。
ただし、DMAの使用は、このサイクルの範囲をはるかに超えています。
残念ながら、最初の方法はArduinoのライブラリとサンプルで一般的に使用されています;このプラットフォームでは、マイクロコントローラーのリソースを適切に使用できません。 ただし、記述とデバッグは簡単です。
4.1 ADCの使用
アナログセンサーを扱う場合、ADCを扱います。 この場合、マイクロコントローラーに組み込まれたADCが考慮されます。 ADCは本質的に同じセンサーであるため-電気信号を情報センサーに変換します-セクション2で説明したものはすべて有効です。ADCの主な特徴は、有効な分解能、感度、基準電圧、速度です。 この場合、ADC変換の出力値は、出力レジスタ内の特定の数値になります。これは、測定値の単位で絶対値に変換する必要があります。 将来的には、個々のセンサーについては、そのような計算の例と見なされます。
4.1.1基準電圧
ADC基準電圧は、ADCの最大出力値が対応する電圧です。 基準電圧は、マイクロコントローラに内蔵された電圧源と外部から供給されます。 ADC測定値の精度は、このソースの精度に依存します。 統合ソースの標準的な基準電圧は、電源電圧またはマイクロコントローラの電源電圧の半分に等しくなります。 他の意味があるかもしれません。
たとえば、Atmega1280マイクロコントローラーの基準電圧の可能な値の表:
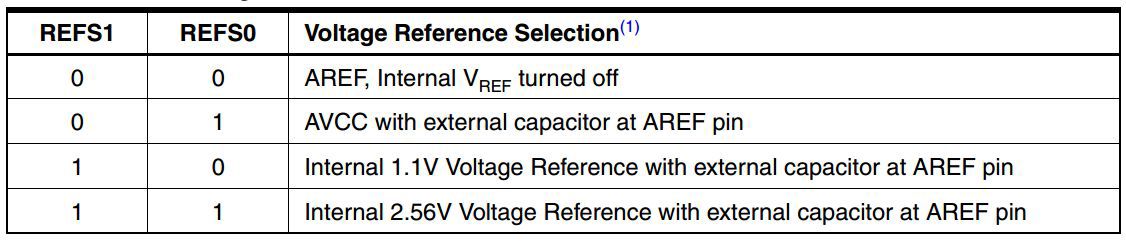
図20. Atmega1280マイクロコントローラーADCの基準電圧の選択
4.1.2 ADCの分解能と感度
ADCの分解能は、電気信号への最小および最大入力露出で出力レジスタの最大値と最小値を決定します。
ADCの最大容量は、その有効容量に対応しない場合があることに注意してください。
下位桁の一部はノイズに見舞われる可能性があります。 ADuCM360マイクロコントローラーのデータシールドを見てみましょう。これは、14ビットの有効ビット容量を持つ24ビットADCを備えています。

図21. ADCデータレジスタビットの割り当て
図からわかるように、32ビットレジスタでは、一部は符号に、一部はゼロに、一部はノイズに割り当てられます。 また、指定された精度のデータを含むのは14ビットのみです。 いずれにせよ、このデータは常にドキュメントに示されています。
ADCの感度は、ADCの有効分解能に依存します。 出力電圧の中間段階が多いほど、感度が高くなります。
ADC Uopの基準電圧を想定します。 次に、2Nの可能な値を持つNビットADCには感度があります。
 (11)
(11)
したがって、12ビットADCおよび3.3V基準電圧の場合、感度は3.3 / 4096 = 0.8mVになります
センサーにも一定の感度と精度があるため、ADCの性能が最高であればいい
4.1.3 ADCパフォーマンス
ADCの性能により、読み取り値の読み取り速度が決まります。 逐次近似ADCでは、入力電圧レベルをデジタル化するために特定のクロックサイクル数が必要です。 ビット深度が大きくなるほど、それぞれ時間がかかります。測定の終了までに信号レベルが変化する時間がある場合、これは測定の精度に影響します。
ADCのパフォーマンスは、1秒あたりのデータサンプル数で測定されます。 ADCクロック信号の周波数を測定に必要な数で割った値として定義されます。 たとえば、ADCの1MHzのクロック周波数と読み取り値を取得するための13クロックサイクルの場合、ADCのパフォーマンスは77キロサンプル/秒になります。 ビット容量のバージョンごとに、その速度を計算できます。 技術文書には、通常、ADCの可能な最大クロック周波数と、特定のビット深度での最大速度が示されています。
4.2デジタルセンサー
アナログセンサーに対するデジタルセンサーの主な利点は、既製の形で測定された大きさに関する情報を提供することです。 デジタル湿度センサーは絶対湿度値をパーセントで返し、デジタル温度センサーは温度値を度で返します。
センサーは、質問と回答の形式でレジスタを使用して制御されます。 質問は次のとおりです。
- AからBへの書き込み
- レジスタCに格納されている値を返します
応答として、センサーはそれぞれ、必要なデータをレジスターに書き込み、パラメーター設定を実行するか、何らかのモードを開始するか、測定データを完成した形でコントローラーに送信します。
これで、一般的な資料を終了します。 次のパートでは、HVACセンサーの例を示します。
センサーの後、アクチュエーターが考慮されます-自動制御の理論の観点から非常に多くの興味深いことがあります。それから、このすべての不名誉のコントローラーの合成と最適化に行きます。
UPD:記事に関する公正なコメントをいただいたamartology 、 ArastasおよびStrossに感謝します。 セクション2および4に資料を追加し、いくつかの論争点を説明しました。
有用な文献のリスト:
- Bessekersky V.A.、Popov E.P. 自動制御システムの理論/ V.A. ベッセケルスキー、E.P。 ポポフ-エド。 4、回転 そして追加します。 -サンクトペテルブルク、職業、2007 .-- 752s。
- センサー:リファレンスマニュアル/ V.M. シャラポフ、E.S。 ポーランド語、N.D。 コシェボイ、G.G。 I.G. Ishanin ミネエフ、A.S。 ソブルコフ。 -モスクワ:Technosphere、2012 .-- 624 p。
- G.ワイグレブ。 センサー デバイスとアプリケーション。 モスクワ 出版社「ミール」、1989
- 最新のセンサー。 参考書。 JJ FRYDEN英訳:Y。A. Zabolotnaya編集:E。L. Svintsova TECHNOSPHEREモスクワテクノスフィア2005