Anneli MossbergおよびOlle Isakssonの投稿「 SystemModelerを使用した航空機フラップシステム障害シナリオのモデリング 」により翻訳。
翻訳に協力してくれたキリル・グゼンコに深く感謝します。
ボーイング747ドリームリフターについて間違ったことを聞いたことがありますか。それは間違った空港に飛んで、過度に短い滑走路に着陸せざるを得ませんでした。 幸いなことに、この物語はハッピーエンドであり、負傷者はいませんでした。 それにもかかわらず、これは非常に危険な状況です。実際の着陸距離(以下FPDと呼びます)が滑走路よりも長い場合、そしてそれは正しい軌道から外れたパイロットのエラーだけでなく発生する可能性があります。
このシナリオの考えられる理由の1つは、フラップの故障です。 フラップ-翼の後端にあるヒンジ付きデバイス。角度位置は航空機の揚力特性を変更するために調整可能です。 たとえば、特定のフラップ位置では、航空機が登るときに低速で飛行したり、速度を上げずに急な角度で着陸したりできます。 主な利点の1つは、PDFが短くなっていることです。 これが私を困惑させるものです。小さなフラップの誤作動により、滑走路が短すぎるほどFPDが大きくなる可能性がありますか?
この質問に答えるには、個々のコンポーネントの誤動作がシステム全体にどのように影響するかを理解する必要があります。 管理システムはこれにどのように反応しますか? テスト中にこれを検出する方法は? これを補うための安全な手順はありますか?また、パイロットまたは保守要員が何らかの理由でこの手順に従わない場合はどうなりますか?

私の同僚であるエンジニアのオーレ・イザクソンとともに、 Wolfram SystemModeler 4と最近リリースされたWolfram油圧ライブラリを使用して、セスナ441コンクエストIIのフラップで発生する可能性のある問題をシミュレートおよび分析することにしました。

このセスナモデルのフラップの最適な角度位置は、パイロットが航空機のダッシュボードから手動で設定します。 他のいくつかの要因に加えて、フラップの最適な角度は、飛行機がどの飛行段階にあるかに依存し、飛行段階はどの飛行特性が最適になるかを決定します。 たとえば、離陸時にはフラップが10度ずれて揚力が追加され、着陸時には30度ずれて揚力と制動力の両方が増加します。 これらのフラップの位置の小さな調整により、短い滑走路に着陸し、航空機にかかる力を減らし、パイロットが反応する時間を増やすことができます。 この特定の航空機には、2つの追加の位置があります。飛行の主要部分が0度、着陸に近づくと20度です。 以下のビデオをチェックして、フラップがどのように動くかを理解してください。
セスナフラップは、電子制御され、油圧駆動されます。 つまり、フラップは電気信号によって制御され、その位置の変化は、ポンプ、バルブ、シリンダー、その他の必要なコンポーネントを含む油圧システムによって提供されます。 パイロットは、ダッシュボードにあるフラップ位置スイッチを介してフラップ位置を制御します。 スイッチの位置が変更されると、電気信号が送信され、リミットスイッチとともにチェックバルブに供給され、油圧システムの圧力が上昇します。

チェックバルブへの供給とともに、バルブのフラップを制御するソレノイドが電荷を受け取り、その結果、シリンダー(フラップドライブ)、ポンプ、タンク間の接続が開きます。 油圧シリンダーはフラップに機械的に接続されています。つまり、シリンダーの動きによりフラップの位置が変化し、シリンダーの動きはチャンバー内の圧力の変化によるものです。

モデル
SystemModelerで導入したセスナフラップシステムモデルは、パイロット、電気システム、推進システム、油圧システム、フラップ、着陸装置の6つの構成可能なコンポーネントで構成されています。

上記のように、セスナモデルは階層的であり、いくつかのサブレベルがあります。 パイロットは、電気サブシステムとフラップの両方から信号を受信します。 たとえば、システム内の圧力に関するデータおよびフラップの現在の位置に関する情報の形式で。 電源サブシステムは、油圧システムのポンプに接続された2つのエンジンで構成されています。これらのエンジンは、フラップとシャーシサブシステムに圧力下で作動流体を供給します。 ポストを戦争と平和の次元に引き伸ばさないために、モデルの説明では一部の詳細を省略する必要がありますが、モデリングプロセスをより詳細に説明する後続のポストで詳細を説明します。

モデルのコンポーネントとそれらの相互作用が一般的な用語で説明されたので、いくつかの潜在的な問題について話します。 飛行に対する恐怖にもかかわらず、私はセスナの航空機事故報告を調査しました。 それらから、スイッチの故障、油圧システムの漏れ、および機械的損傷は、すべての航空機システムに影響するフラップの故障の例です。 したがって、障害分析に次のシナリオを含めてみましょう。
1. フラップサブシステムのパイプリーク。
2. フラップをシリンダーに接続する機械的ロッドの破損。
3. 飛行中のフラップコントロールバルブの電気的故障。
最初に、すべてが正常に機能し、パイロットがフラップを安全に制御できるシナリオを検討します。 パイロットはスイッチを動かし、10°-> 20°-> 30°-> 0°の位置に移動します。これは離陸 -> アプローチ -> 着陸 -> 飛行に対応します。 これはフラップコマンドのかなり奇妙な組み合わせであり、実際には20秒で完了することはほとんどありません。 それは教育目的のみを持っています。 たとえば、フラップが正しく動作するかどうかのテストと見なすことができます。
まず、 WSMLinkをダウンロードしてモデルを設定する必要があります。

同僚のオレは、セスナモデルのさまざまなコンポーネントの問題のタイプを体系化しました。 また、たとえば、ソレノイドの接点の閉鎖を調べるには、ソレノイドの閉鎖モードに切り替えて、シミュレーションを開始するだけです。

公称の場合、すべての障害パラメーターはゼロに設定されます。つまり、すべてのコンポーネントは正常に動作します。 障害モードは構造パラメーターであるため、 WSMParameterValuesではなくWSMSetValuesを使用する必要があります。

実際のフラップは、パイロットが設定された公称位置のどの位置と比較されますか?

ご覧のように、フラップの位置はパイロットのコマンドによって異なりますが、フラップが伸縮する特定の時間に起因する特定の遅延で位置が変化します。
また、フラップに供給される圧力に対応する吐出油圧バルブで圧力がどのように生成されるかを見てみましょう。 特に電気的故障の場合、別の興味深い側面は、フラップを開くように指示する電気信号です。

上のグラフでは、圧力ピークがフラップの位置にどのように対応しているか、電気信号のピークがパイロットが送信する位置を変更するコマンドにどのように対応しているかを確認できます。
それでは、他のオプションを見て、それらが名目とどのように関係しているかを見てみましょう。
シナリオ:パイプの漏れ
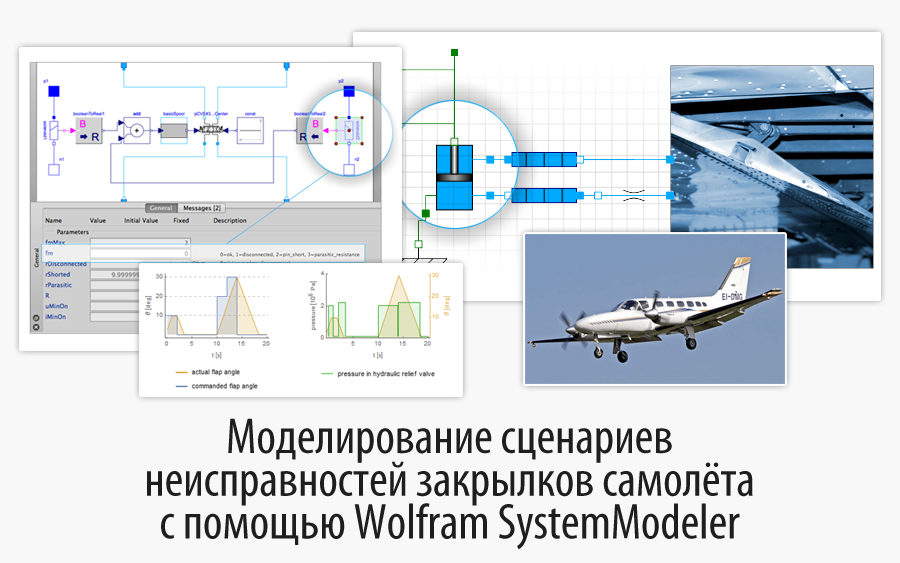
このシナリオでは、フラップの誤作動の初期位置は通常の場合と同じですが、パイプのフラップサブシステムに漏れがあります。 パイプのfmパラメーターを0から2の範囲で変更することにより、リークをモデルに埋め込むことができます。

画像は、現在のパイプを備えたシステムのモデルを示しています-左側は、制御フラップ角度と実際のフラップ角度で、右側は、油圧サブシステムHydraulicPowerのアンロード油圧バルブの圧力変化です。
漏れによりシステム内の圧力が低下し、その結果、シリンダーの圧力が低下することがわかります。 この減少により、フラップの動きが遅くなり、システム全体の規模で応答時間が長くなります。 このようなシナリオは、パイロットがフラップの位置を素早く変更する必要がある位置にいる場合、たとえば、航空機が滑走路に近づきすぎたり、間違った角度で接近したりする場合、危険な場合があります。
シナリオ:壊れたロッド
前述したように、フラップサブシステムには、フラップの動きを制御する油圧シリンダーが含まれています。 フラップに接続されたロッドが破損した場合、つまり、このロッドを介して力を伝達できない場合に何が起こるかを調べてみましょう。

下の2つのグラフでは、システム内で圧力の上昇が発生し、電気信号の動作が予想どおりであることがわかります。 それにもかかわらず、フラップは所定の位置に残ります。 ロッドが破損しているため、受信したコマンドに関係なく、シリンダーはフラップの位置を変更する力を伝達できません(右上のグラフを参照)。 この場合、一見小さな不具合でもPDFが大幅に長くなります。
シナリオ:飛行中の電子システムの故障。
飛行機がすでに空中にある場合にのみ誤動作が検出可能になる場合があります。そのような状況を予測し、誤動作を修正できるアクションのアルゴリズムを用意することが非常に重要です。 飛行中に電子システムに問題があったシナリオを見てみましょう。 パイロットは離陸前にフラップをテストできませんでした。つまり、フラップを収縮するコマンドが飛行中に初めて送信されました。 フラップの制御フラップの電気的誤動作は、ソレノイドの接点が閉じているためです。 短絡ソレノイドが飛行中に回路を開くため、パイロットはフラップの制御を失います。

パイロットは、フラップの位置を10度から0に変更するまで、この誤作動に気付きませんが、フラップを引き出すことは可能です。 ただし、パイロットがフラップを引っ張ろうとすると、短絡回路ブレーカーまで短絡し、フラップのすべての制御が失われ、その結果、着陸するためにより長い滑走路が必要になります。 まあまあの視点、右? ただし、状況の修正に役立つアクションのアルゴリズムをテストできます。
シナリオ:飛行中の電子システムの故障とトラブルシューティング手順
セスナモデルを使用してトラブルシューティング手順を実装することができます。これにより、電子システムが誤作動しても、飛行機を安全に着陸させることができます。 たとえば、この手順では、スイッチをランディングに移動し、サーキットブレーカーをリセットします。 リセット後、フラップを直接引き込めない場合でも、フラップを直接着陸位置に置き、安全に着陸できます。 これが機能するかどうか見てみましょう。

画像では、短絡ソレノイドが緊急フラップシステムを作動させたときの飛行中の電子システムの故障のシミュレーションを見ることができます。
短絡ソレノイドが飛行中に回路を開くため、パイロットはフラップの制御を失います。 次に、パイロットはスイッチを着陸位置にし、サーキットブレーカーをリセットし、フラップを正常に開きます。
結論は何ですか?
私の質問に戻りましょう。小さなフラップの誤作動によりFPDが大きくなりすぎて、滑走路が短くなりすぎることがありますか?
障害分析から判断すると、これはおそらくもっともらしいシナリオです。 これは、フラップの誤動作(たとえば、前述の飛行中の電子システムの誤動作)によって引き起こされるPDFの増加が滑走路の長さを超える場合に発生する可能性があります。 このモデルは、セスナとの協力なしに開発されたものであることに注意してください。つまり、電子システムやいくつかのパラメーターの値など、デバイスに関していくつかの仮定が行われました。 つまり、モデルのすべての側面が100%正確または完全であることを保証することはできません。 それでも、問題の発生のさまざまなシナリオ、問題の検出方法、およびそれらを除去する手順の開発方法を調査する手段としてモデリングを使用する可能性を示しています。
Wolfram SystemModelerを使用して、特定のコマンドシーケンス後の問題、たとえばテスト中に実行できることを分析しました。 同じ原則を使用して、 SystemModelerを使用して、診断が困難なシステムのコード障害を分析できます。 また、提案されたトラブルシューティング手順をテストし、システム全体でどのように相互作用するか、システムがどのような反応をするかを確認しました。 このようなテストにより、人間と機械の相互作用の原理をよりよく理解できます。
誤動作を自分でシミュレートしたい場合、またはこの投稿で使用したツールのアイデアを知りたい場合は、 SystemModelerとMathematicaの両方の試用版をダウンロードできます。 はい、Wolfram Hydraulicライブラリと他のいくつかのライブラリの両方を新しいWolfram SystemModeler Library Storeからダウンロードできます。