数年前、私は視覚障害者が私たちの周りの世界により良く適応できるようにする一連の低コストのデバイスを開発するタスクを自分自身に設定しました。 今日、志を同じくする人々のチームとともに、私はいくつかのプロジェクトを実装することができました。
この記事では、杖の超音波ノズルと超音波キーフォブについて説明します。安価なモジュールから組み立てられた完全なデバイスです。
超音波杖アタッチメントおよび超音波キーチェーンは、従来の杖で検出できるレベルよりも高い障害物を警告する視覚障害者向けのデバイスです。 そのような障害物は、高い着陸、障壁、高いフェンスを備えた車であり得る。 超音波ノズルは通常の杖に取り付けられ、超音波キーチェーンは首に掛けられるか、懐中電灯のように手に装着されます。
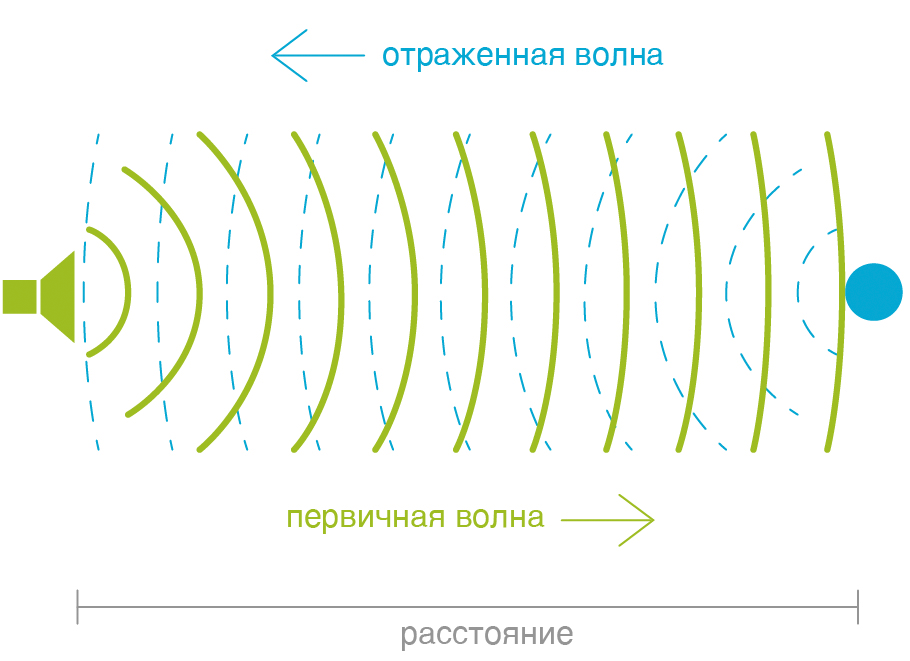
デバイスの動作は、障害物からの超音波の反射に基づいています。 パルスが発生した瞬間と反射エコー信号を受信した瞬間の時間差を測定することにより、障害物までの距離を判断できます。
デバイスの開発には、距離を測定するセンサー、制御ボード、信号装置を選択し、バッテリー、それらを充電する方法、および適切なケースを選択する必要があります。
超音波センサー
障害物までの距離を測定するために、2つのデバイスがテストされました。
- Arduino互換の超音波モジュールHC-SR04
- カーパークトロニックHO 3800
両方のデバイスは、同様の原理で動作します。 違いは、センサーの方向パターン、障害物と設計を決定するための最大範囲です。
センサーパラメーターの比較:
| パラメータ | HC-SR04 | HO 3800 |
|---|---|---|
| 最大範囲、m | 4 | 2,5 |
| 供給電圧 | 5 | 5 |
| 1つのデバイス内のセンサーの数 | 1 | 4 |
| 情報出力 | アナログ | デジタル |
テスト中、HC-SR04モジュールは障害物を検出し、困難な気候条件(寒さ)で動作する能力がわずかに劣ることが判明しました。
両方のセンサーは、違いにもかかわらず、障害物までの距離を測定する手段として杖の超音波ノズルで使用できるため、価格はセンサーを選択する際の主なパラメーターになりました。 安価なHC-SR04センサーに決めました。
制御盤
Arduinoプラットフォームが制御ボードとして選択されています。 私たちの場合、最も適切なボードはミニチュアバージョンです:Arduino Mini、Arduino Nano、またはArduino Pro Mini。 一般に、同様の機能を提供する他のコントローラーを使用できます。
電池
デバイスに電力を供給するには、リチウムイオン(Li-ion)またはニッケル水素(Ni-Mh)バッテリーセルを使用することをお勧めします。
通常の気候条件で使用する場合、Ni-Mhと比較して次の利点があるLiイオン電池を使用するのが理にかなっています。
- 充電回路の実装の容易さ
- 既製の充電モジュールの可用性
- より高い出力電圧
- さまざまな全体寸法と容量
低温では、Ni-Mh電池を使用することが望ましいです。
1つのNi-Mhバッテリーの出力電圧(1.0 -1.4 V)は、デバイスを動作させるのに十分ではありません。 5 Vの電圧(ArduinoとParktornikの両方の動作に必要)を得るには、バッテリーに加えて、ステップアップDC-DCコンバーターを使用します。
選択したDC-DCコンバーターを機能させるには、0.9-6.0 Vの入力電圧を供給する必要があります。必要な出力電圧を得るには、1.2ボルトのNi-Mhエレメントを1つ使用できます。 ただし、入力電圧の低下に伴い、コンバーターの負荷容量も低下するため、デバイスの安定した動作のために、コンバーター入力に少なくとも2 Vを供給することが望ましいです(各1.2 Vの2つのNi-Mhセルまたは3.7 Vの電圧を持つ1つのLi-ionセル)。 1.2 Vの入力電圧では不十分なDC-DCコンバーターがあることに注意してください。
バッテリー充電
リチウムイオン電池の場合、充電の終了を示す既製の安価なモジュールが多数あります。
Ni-Mhバッテリーの場合、すべてがより複雑です。 現時点では、市場に既製の組み込みソリューションは見つかりませんでした。 Ni-Mhバッテリーを充電するには、専用の外部充電器を使用するか、独自の充電スキームを作成します。
Ni-Mhセルを充電する1つの方法は、2つのLM317リニアスタビライザー(または同様のもの)を直列に接続することです。1つ目は電流制限モード、2つ目は電圧制限モードです。
このような回路の入力電圧は7.0〜7.5 Vです。安定器が冷却されていない場合、この電圧を超えることは推奨されません。 充電中の各Ni-Mhバッテリーの電圧は、約1、45 V(完全に充電されたNi-Mhセルの電圧)でなければなりません。 過熱とマイクロ回路の故障を避けるために、適切なラジエーターを使用する場合、バッテリー充電電流は100 mAを超えてはならず、200 mAに増やすことができます。
このような充電方式の利点は、充電状態を制御する必要がないことです。セルの目的の電圧に達すると、電流は自動的に安全な最小値まで低下します。
信号装置
警告チャネル(聴覚または触覚)の選択に応じて、アクチュエーター(ブザーまたは振動モーター)が選択されます。 さらに、両方の通知方法を組み合わせて、ユーザーがそれらを切り替えることができます。
プロトタイプのテスト中に、振動を通じて障害物の近接に関する情報を送信することが最も便利であることがわかりました。 この場合、視覚障害者にとって非常に重要なオーディオチャネルは関与しません。 そのため、当社が開発および組み立てるすべての製品は、振動を使用して障害を警告しています。 振動の強度は、障害物までの距離に比例します。
本体
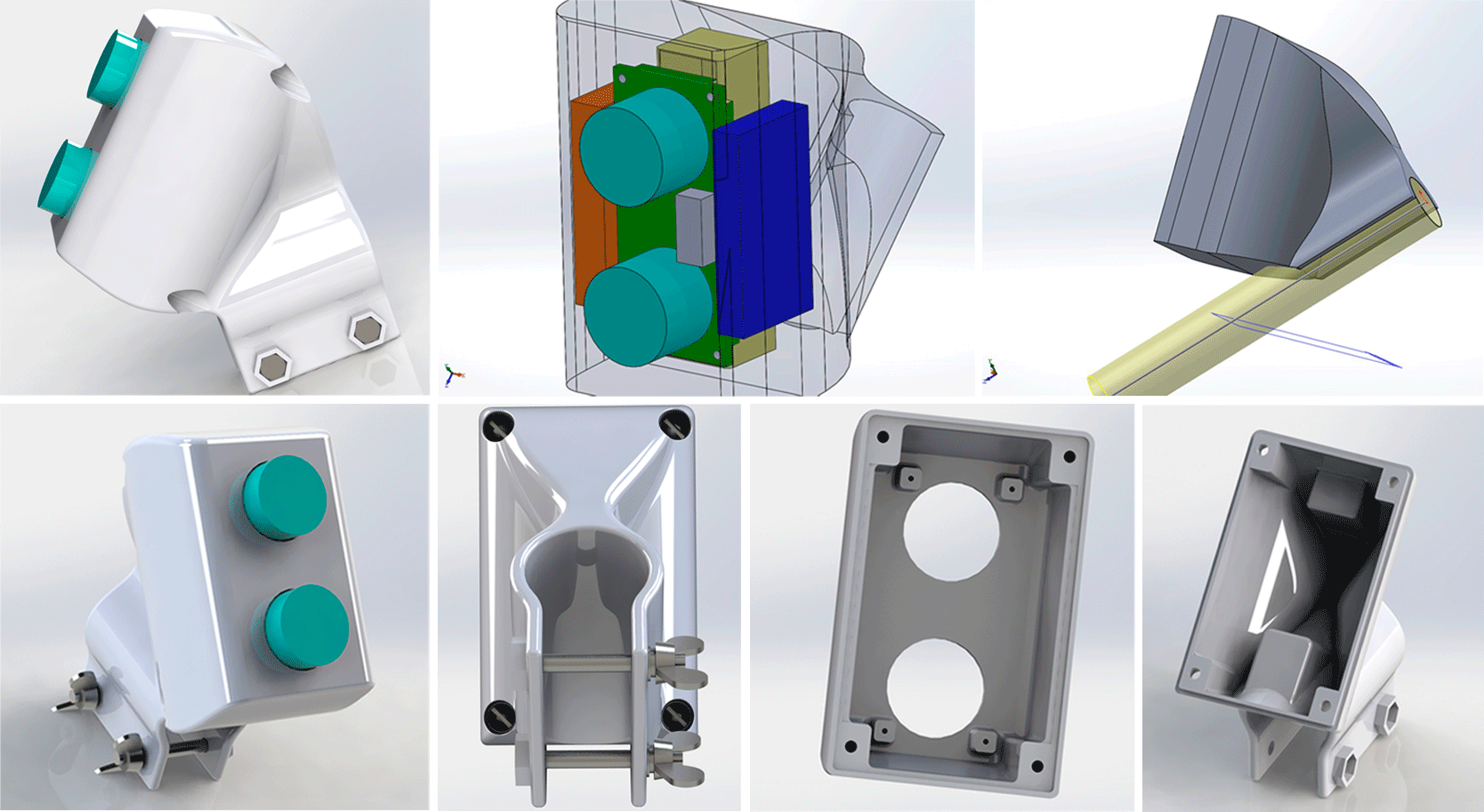
大量生産されたケースの中では、超音波杖の取り付けに便利なケースを見つけることができませんでした。 デバイスをテストするために、3Dプリンターで印刷されたABSプラスチック製のボディを使用しました。 3Dプリンターでケースを印刷するために、次の3Dモデルを開発しました。
試験結果
開発プロセス中に、12を超える製品バリエーションが収集されました。 各新製品は、以前のものの欠点を排除しました:開発プロセス中に、製品の寸法と重量を削減し、価格と技術的特性の両方で満足する超音波センサーを選択し、オーディオチャネルの使用を拒否し、デバイスのアルゴリズムを最適化しました。 ブラインド(Bortnikov P.V.、Shalintsev V.A.)とともに、組み立てられたすべての製品でテストが実施されました。 その結果、最終サンプルを取得しました。
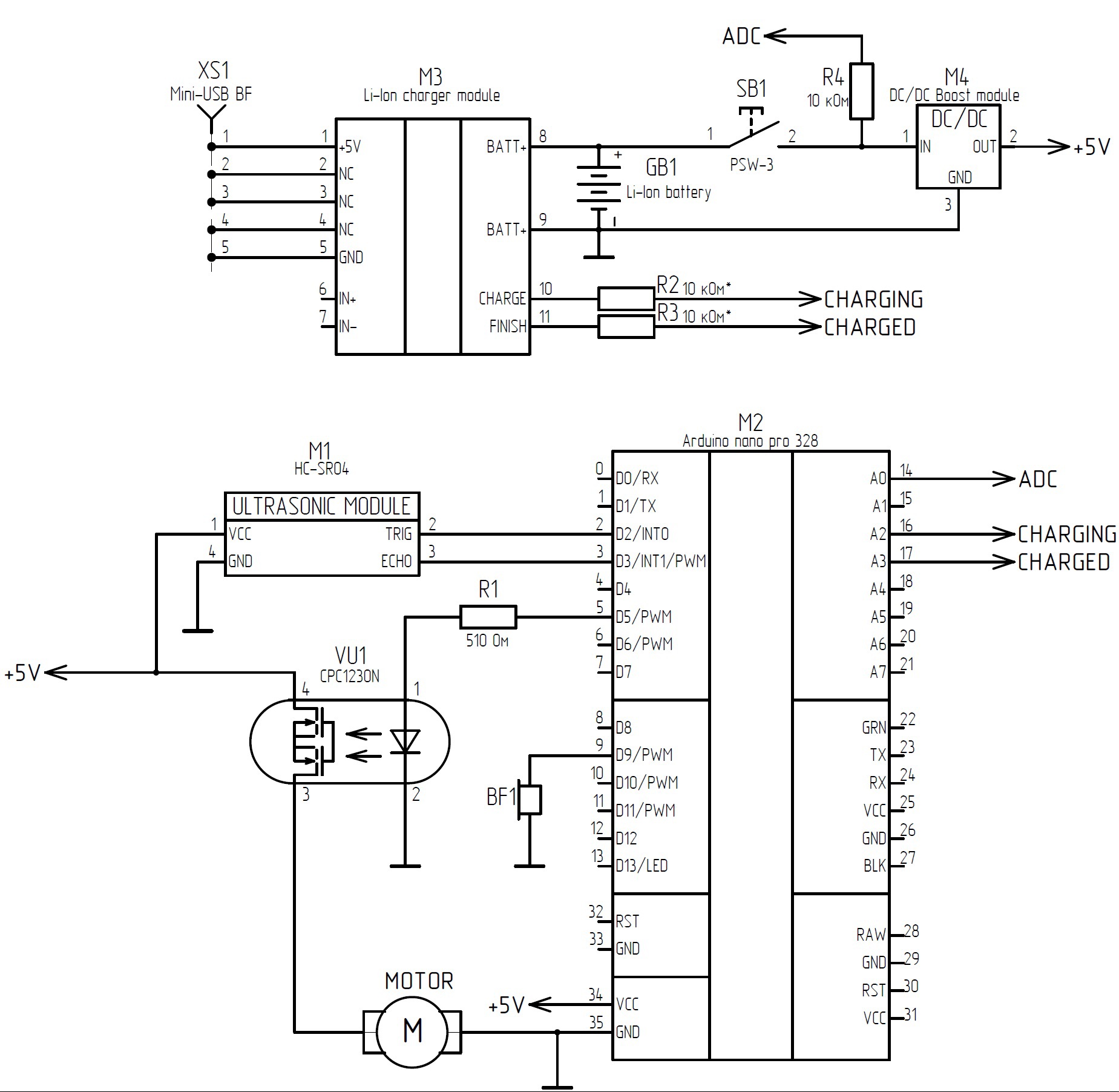
以下は、開発されたデバイスの電気回路図です。
首の分解された超音波キーチェーンは次のようになります。
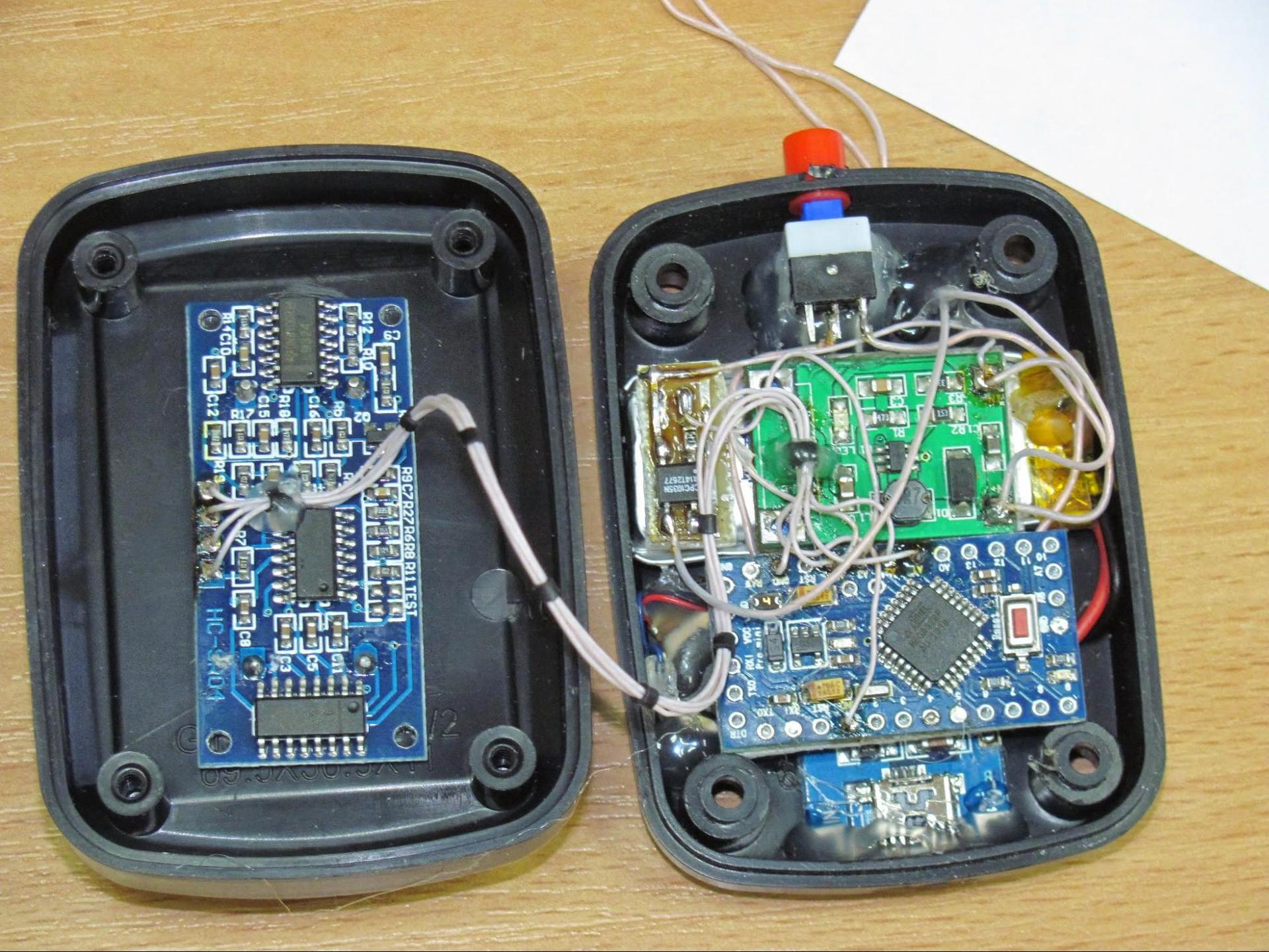
アセンブリで使用されるすべてのコンポーネントは、3Dプリンターで印刷された杖の頭を除き、AliExpressを通じて購入されました。
- 超音波センサーHC-SR04。
- Adruino Proミニ管理ボード
- バッテリー3.7 V 300 mAh。
- 電圧コンバータ0.9V〜5V〜5V 600 mA。
- 充電モジュールAC / DC 220V〜5 V 1A。
- 充電器LA-520W。
- 信号装置:4x10mm DC 3V携帯電話用の振動モーター。
- PB-22E60ボタン。
- Gainta G1906ケース(チャーム用)。
- トランジスタ:bss138 / bcr108またはフォトカプラCPC1230N。
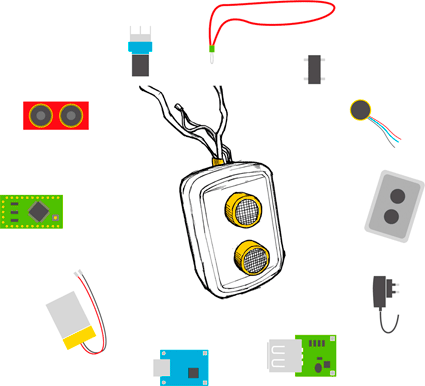
杖に超音波ノズルを組み立てるために使用されるコンポーネントの外観と価格(中国からの配送を含む)を図に示します。
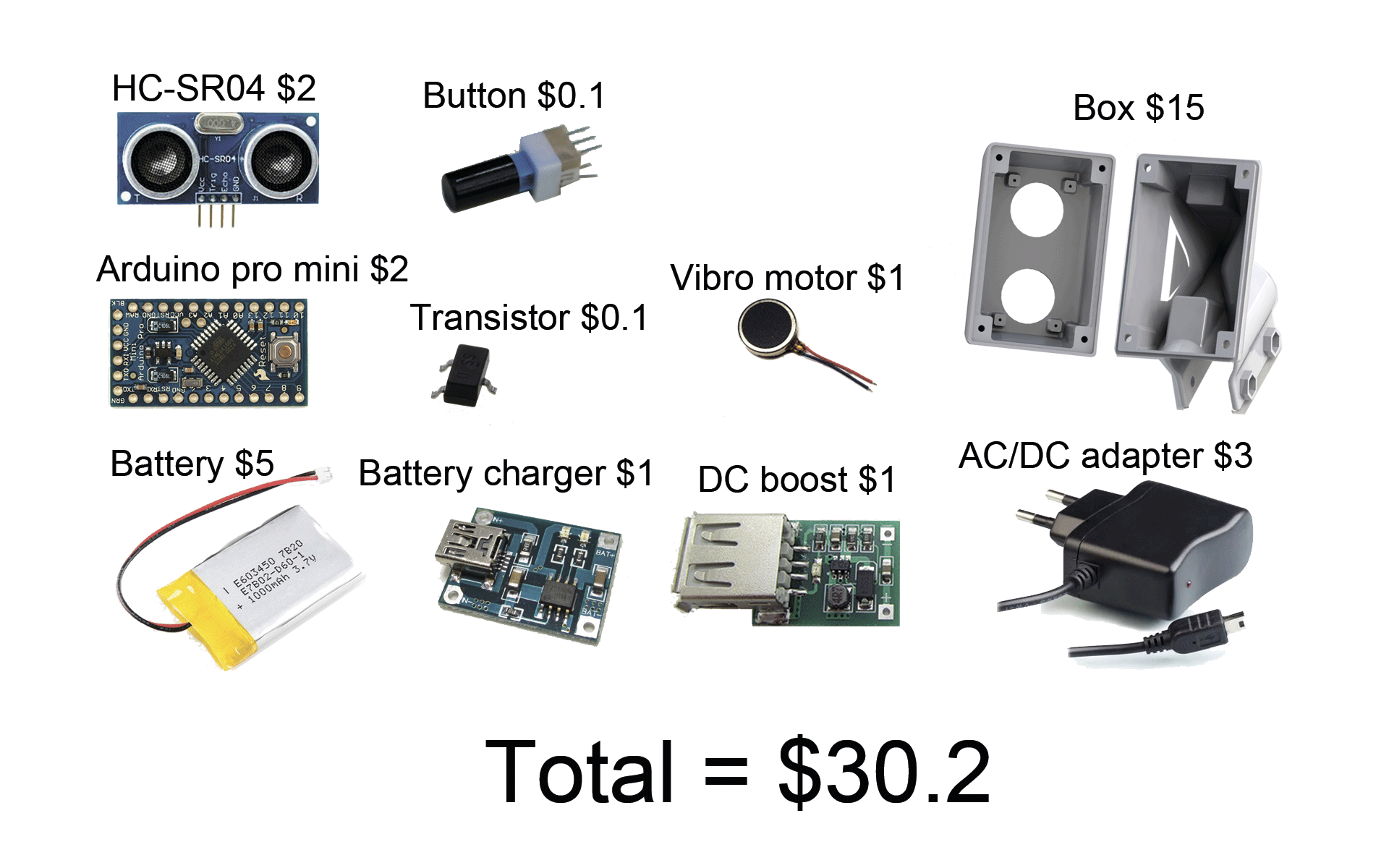
アセンブリで使用されるコンポーネントのうち、デバイスのコストへの最大の貢献は、3Dプリンターで印刷されたケースによって行われます。
超音波キーフォブの組み立てに使用されるコンポーネントの外観と価格(中国からの出荷を含む)を図に示します。
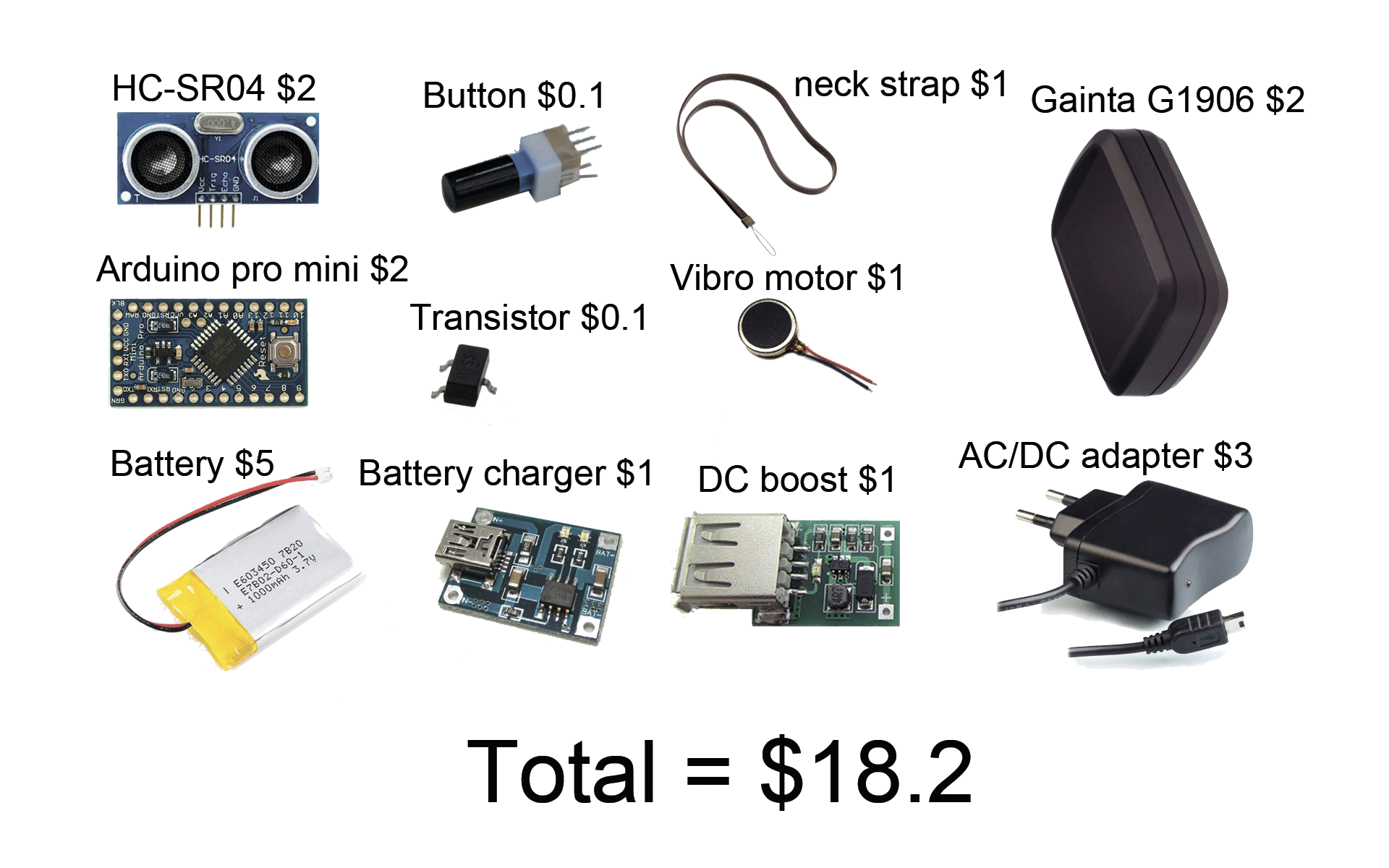
将来、Gainta G1906の本体へのマウントを開発し、杖のノズルなどの本体を備えたデバイスを使用できます。
デバイスのコストを削減する1つの方法は、中国で生産を直接展開することにより、人件費とデバイスコンポーネントをロシアに配送するコストを節約することです。
開発したデバイスには次の特徴があります。
| 特徴 | 価値 |
|---|---|
| 障害物検出範囲 | 1.5メートル |
| 充電あたりの平均バッテリー寿命 | 8時間 |
| 振動レベルの数 | 3(1.5 m / 1.0 m / 0.7 m) |
| 充電方法 | ミニUSB |
デバイスの予備テストを実施した後、人の流れでデバイスを使用するときに不要なトリガーが発生しないように、障害物の検出範囲を1.5メートルに制限する必要がありました。 振動レベルが連続的に変化すると、障害物の接近を判断することがより困難になるため、予備テストの結果によると、3つの振動レベルで停止しました。
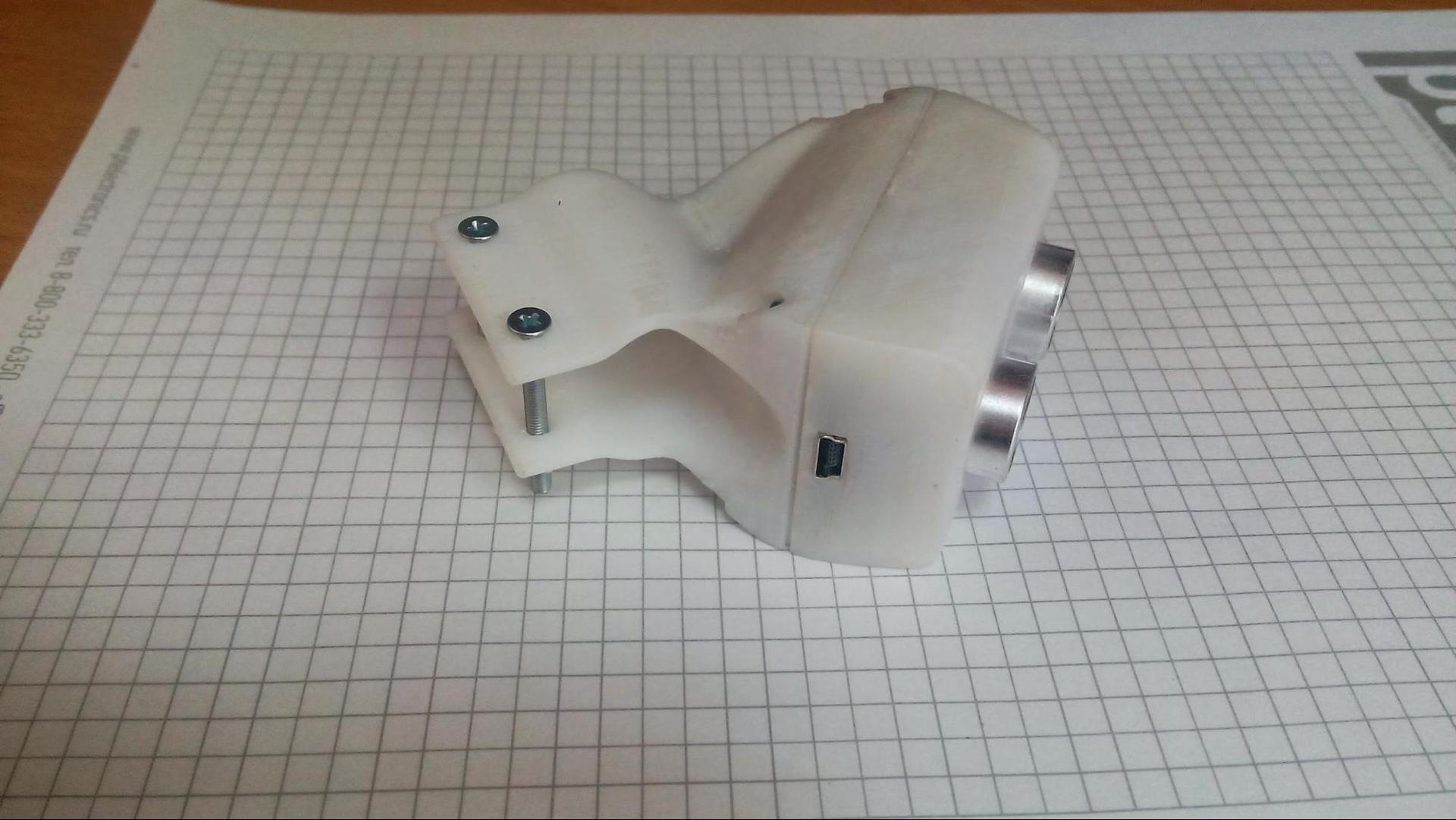
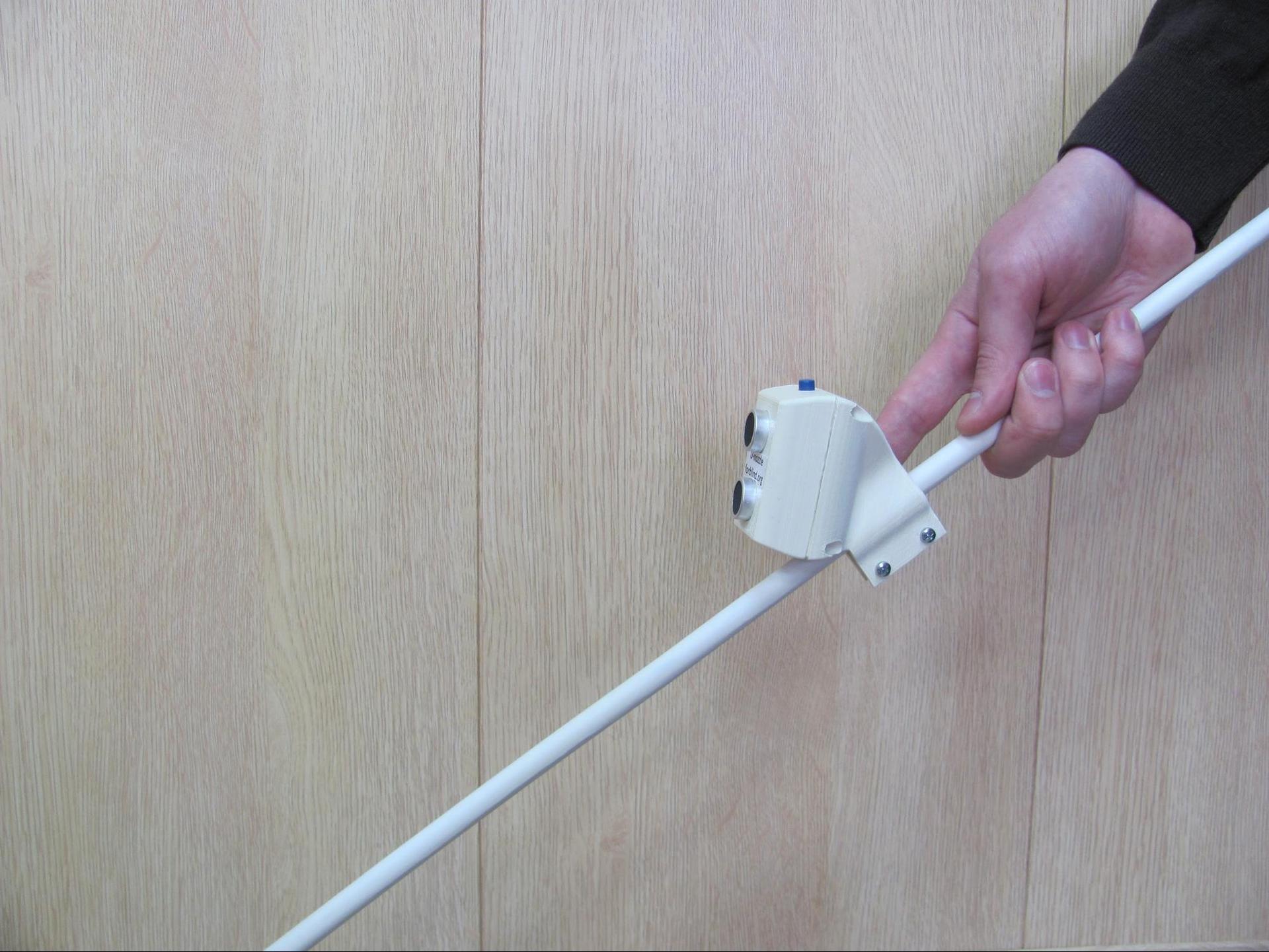
杖の超音波ノズルの外観:

首のキーリングの外観:



超音波杖付属品の3DモデルとAdruinoのファームウェアソースコードは、 ここからダウンロードできます 。
私たちの計画
盲人の大規模なサンプルの最終テストに必要な製品の小さなバッチを作成するために、Indiegogoクラウドファンディング会場で資金調達を開始しました。
開発の最後に、超音波杖の先端と超音波キーフォブの作成を整理するために必要なすべての情報がプロジェクトのWebサイトに投稿されます(プロジェクトの説明、設計文書、プログラムコード)。
将来的には、視覚障害者向けのデバイスの大量生産を確立する予定です。 デバイスのコストと最終価格を削減するために、中国での生産拠点を探します。