背景
自宅で光と気候の制御を自動化するだけでなく、独自のロボットを作成したいと考えました。 この目的のために、利用可能な機会を模索し始めました。 私自身は、すべての決定を2つのグループに分けました。コントローラー上のコードが1つのメインループ(arduino、legoなど)で実行されるシステムと、メッセージを交換する並列プロセスで構成されるシステムです。
使いやすいユーザーインターフェイスを備えた最も単純なソリューションを見つけたいと思ったため、直感的に2番目のグループを選択しました。 この「家族」の最も人気のある代表者のうち、私はMicrosoft Robotics StudioとROSが本当に好きでした。 しかし、残念ながら、現時点では、それらを特定のハードウェアにリンクすることは簡単ではなく、それらをゼロから理解することも簡単な作業ではありません。 その結果、私は自分でそれを書くことにしましたが、私は本当にCで「コーディング」したくありませんでした、ソウルはもっと簡単で簡単なものを求めました。 最後に、私はPythonを選択しました。 そして、他の多くのアイデアがロボットと「スマートホーム」を越えて頭に登り始めたことを考慮して、私はすぐに開発の容易さに主な重点を置く小さなフレームワークを作成することにしました。
コンセプト
概念的には、フレームワークは、さまざまなロボット機能を実装するユーザーがサポートするモジュールのセットです。 動作中、Bubotは互いに非同期にメッセージを送受信できるプロセスのネットワークを構築します。 また、互いに通信するロボットのネットワークを構築することもできます。
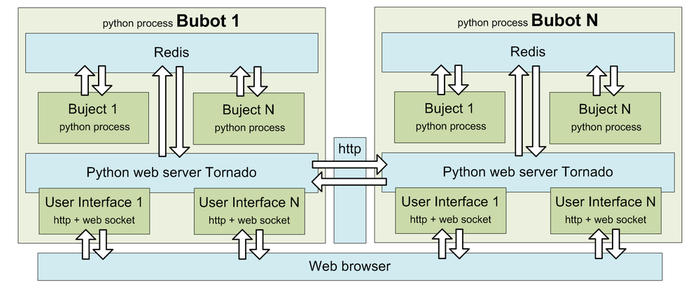
プロセスネットワークは、標準のPythonマルチプロセッシングモジュールに基づいて構築されています。 メッセージングシステムと共有メモリは、 Redisを使用して実装されます。
各BubotにはWebサーバー、 Tornado Webサーバーが組み込まれています。これにより、移動中のロボットのステータスの監視、ロボットの制御、パラメーターの変更(キャリブレーション)が可能になります。
Bubotはリアルタイムシステムではありませんが、Bubotはリアルタイムコードと統合できます。
ハローバブル
何か新しいことを学ぶことは、例によって常に簡単になります。最初に頭に浮かぶのは、Wi-Fiまたは3Gを介してWebインターフェースを使用して、制御のために無線操縦玩具を作り直すことです。
これを行うには、中国のラジコン機とPython 3を実行できるミニコンピューターが必要です。最も手頃なウサギの1つがモルモットとして購入されました-raspberry pi b +。
最初は、ほとんどすべてのラジコンマシンは2つのモーターと1つの原始的な無線モジュールです。 マシン自体がすべての電子機器を収容するのに適したサイズになるように、モーターのみが必要です。
開始するには、タスクを単純化します。マシンは4つのアクションを実行する必要があります。前進または後退、左または右に曲がります。
問題を解決するには、次が必要です。
- モーターをラズベリーに接続する
- 特定の物理デバイスでユーザーコマンドを受信して解釈するサービスを実装する
- ユーザーコマンドを送信するWebインターフェイスを実装します。メインまたはロータリーエンジンの出力を-100%/ 0%/ 100%に設定します。
モーターを接続します
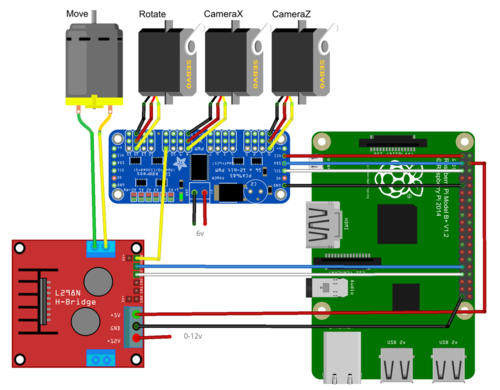
モーターをRaspberry Piに接続する最も簡単な方法は、既成のコントローラーを使用することです。コントローラーの選択は、モーターの推定電力のみに依存します。 L298Nに基づいてマージンを選択しました。 aliexpress「L298Nモータードライバーボード」の検索文字列には、配送に約3ドルかかります。

また、ラズベリーに電力を供給するには、少なくとも1つの降圧電圧コンバータが必要です。 私はLM2596に基づいて撮影しました。 aliexpressの検索文字列「DC-DC LM2596」では、送料が約1ドルかかります。
この接続により、マシンにコマンドの1つを実行させるには、対応するGPIOで高レベルを設定するだけで十分です。
モーターモジュールを実現
モデルを簡素化するために、私たちのチームがモーターに直接アクセスできるようにします。
2つの同一の(ソフトウェアの観点から)モーターがあるため、1つのモジュールが必要です。 すべてのモジュールは、Buject基本クラスまたはその子孫から継承されます。 開発者は、基本クラスから、メインの無限ループ、イベントを処理して渡すためのメソッドを受け取ります。 フレームワークのモジュールは、bujectディレクトリにあります。 各モジュールは2つのファイルで構成されます。
- [モジュール名] .py-モジュールロジック
- [モジュール名] .json-モジュールの説明。 これには、モジュールパラメータのリスト、それらのデフォルト値、可能なステータスのリスト、モジュールによって生成されたメッセージの説明、およびモジュールがサブスクライブされるメッセージのリストが含まれます。
モーター\ buject \ MotorTest.pyのサンプルモジュール:
import json from buject.Buject import Buject import RPi.GPIO as GPIO class MotorTest(Buject): # def __init__(self, user_config=None): super(MotorTest, self).__init__(user_config) # # GPIO def on_ready(self): GPIO.setmode(self.param["mode"]) GPIO.setwarnings(False) # , # # # set_power def incoming_request_set_power(self, message): data = json.loads(message['data']) if data['param']['value'] > 0: # GPIO.setup(self.param['GPIO_reward'], GPIO.OUT, 0) GPIO.setup(self.param['GPIO_forward'], GPIO.OUT, 1) self.status['action'] = "forward" elif data['param']['value'] == 0: GPIO.setup(self.param['GPIO_forward'], GPIO.OUT, 0) GPIO.setup(self.param['GPIO_reward'], GPIO.OUT, 0) self.status['action'] = "stopped" else: GPIO.setup(self.param['GPIO_forward'], GPIO.OUT, 0) GPIO.setup(self.param['GPIO_reward'], GPIO.OUT, 1) self.status['action'] = "backward {0}%".format(self.status["power"]) # , if self.param['debug'] > 1: self.log('Buject "{0}" {1}'.format(self.param['name'], self.status['action']))
コメントは不要だと思います。 モーター出力が示されているパラメーターで要求が到着し、それがゼロより大きい場合、モーターに前進するよう指示します。
この場合の無限のサイクルは関係していませんでした。 ある場合は、main_loop()メソッドを定義するだけで十分です。
\ buject \ Motor.jsonモーターのモジュール記述の例:
{ "param": { "name": { "value": "MotorTest", "description": " " }, "parent": { "value": "Buject", "description": " , " }, "buject": { "value": "MotorTest", "description": " = " }, "GPIO_forward": { "value": 0, "description": " GPIO " }, "GPIO_backward": { "value": 0, "description": " GPIO " }, "GPIO_mode": { "value": 11, "description": "value for GPIO.setmode GPIO.BOARD=10 GPIO.BCM=11" } }, "incoming_request": { "set_power": { "name": "set_power", "description": " ", "param": { "value": { "description": " ", "type": "int" } } } } }
paramセクションには、モジュールの起動と操作に必要なパラメーターのリストが含まれています。 最初の3つは各モジュールに必要であり、Buject基本クラスから継承します。 後者はこのモジュールのみに固有のものであり、必要に応じて番号と名前を自分で思いつきます。 GPIO_modeはGPIOアドレッシングモードを設定し、将来再定義されません。 GPIO_forwardおよびGPIO_backwardの場合、デフォルト値を設定することは意味がありません。 特定のモーターがどの結論に接続されるかにのみ依存し、このモジュールの起動パラメーターでさらに定義します。
また、モジュールの説明には、モジュールの現在の状態を反映したステータスセクション(計算されたすべてのパラメーターが説明されている)が含まれている場合があります。 モジュールに追加されたステータスはありませんが、気づいた場合、モジュール自体のコードで「アクション」のステータスを変更します。これはベースBujectモジュールの説明で定義されています。
このフレームワークは、5種類のメッセージを使用する機能を提供します
- incoming_request-モジュールが処理できるリクエストのリスト。
- outgoing_request-モジュールによって生成されたリクエストのリスト。 パラメーターは、リクエストを受信するサービスの名前とリクエストの名前を指定する必要があります。
- incoming_event-他のモジュールのイベントへのサブスクリプションのリスト。サービス名とイベント名を必ず指定してください。
- outgoing_event-他のモジュールがサブスクライブできるイベントのリスト。
- incoming_responseは、発信要求で宣言されるサービスタイプです。 サービスは要求に対する非同期応答を待つと言います。
Webインターフェースを実装します
各ロボットは、無制限の数のWebインターフェースを持つことができます。 私たちの場合、ロボットを制御するために、たった1つで十分です。4つのボタンを実装し、押されるとコマンドを発行し、押されるとキャンセルします。
ユーザーインターフェイスはuiディレクトリに格納されます。 ユーザーインターフェイスの各ページは個別のサブディレクトリで説明され、少なくとも2つのファイルで構成されます。
- [ページ名] .html-ページレイアウト。
- [ページ名] .json-インターフェースの説明。 フレームワークの各ページ(セッション)は基本的に個別のサービスです。このファイルには、このページがサブスクライブするイベントの説明と、生成されるメッセージが含まれます。
- [ページ名] .py-(オプション)このユーザーインターフェイスのコマンドを処理するためのサーバーロジックを含めることができますが、この場合は役に立ちません。
繰り返しますが、知覚を改善するために、もう少し簡単にしましょう。 以下の例では、ワンボタンフォワードアルゴリズムを検討します。 残りは類推によって行うことができます。
そのため、uiディレクトリにscout_easyサブディレクトリを作成し、その中に次の内容を持つ2つのscout_easy.htmlおよびscout_easy.jsonファイル(テキストに関するコメント)を作成します。
\ ui \ scout_easy \ scout_easy.html
<!DOCTYPE html> <html> <head lang="en"> <meta charset="UTF-8"> <link rel="stylesheet" href="/static/jquery-ui-1.11.2/jquery-ui.css"> <script type="text/javascript" src="/static/jquery-2.1.3.min.js"></script> <script type="text/javascript" src="/static/jquery-ui-1.11.2/jquery-ui.js"></script> <script type="text/javascript" src="/static/bubot_socket.js"></script> <title>BuBot</title> <script> function bubot_on_open() { // , // WebSocketa // , ui/studio ui/scout--> } function get_bubot_actions() { // , , // . // ui/studio ui/scout--> return {}; } $(function () { // $("#command_move_forward").button({}).mousedown(function () { // , // 100% // 0%--> bubot_send_message('send_request', {'name': "set_move_motor_power", 'data': {'value': 100}}); }).mouseup(function () { bubot_send_message('send_request', {'name': "set_move_motor_power", 'data': {'value': 0}}); }); }) </script> </head> <body class="ui-widget-content"> <button id="command_move_forward" class="command_button">forward</button> <div id="console" class="ui-widget-content"></div> </body> </html>
div id = consoleが存在する場合、フレームワークはそれに含まれるすべてのコンソールメッセージを出力します。 サーバー側のコードエラー。
bubot_socket.js-すべてのUIページに存在する必要があります。サーバーとメッセージングへの接続を確立するのは彼であるためです。
サーバーへの接続はWebソケットを介して行われ、bubot_send_messageメソッド([メッセージ名]、[メッセージパラメーター])はサーバーへのメッセージの送信を担当します。 サーバーでは、メッセージが到着すると、同じ名前のメソッドが呼び出され、そこにメッセージパラメーターが送信されます。 この場合、set_move_motor_powerリクエストを送信するメソッドが呼び出され、フレームワークはユーザーインターフェイス記述ファイルからメッセージ受信者の名前を取得します。これらのサービスの名前は、ロボットを説明する最後のセクションで決定されます。
\ ui \ scout_easy \ scout_easy.json
{ "incoming_request": { "console": { "time": {}, "message": {} } }, "outgoing_request": { "set_move_motor_power": { "name": "set_power", "buject": "move_motor", "description": " ", "param": { "value": { "description": " , > 0, < 0", "type": "int" } } }, "set_rotate_motor_power": { "name": "set_power", "buject": "rotate_motor", "description": " ", "param": { "value": { "description": " , > 0, < 0", "type": "int" } } } } }
ロボットを起動します
そのため、ロボットのすべての部品を準備しました。 実行するには、ロボット自体の説明を含む別のファイルが必要です。
configディレクトリには、すべてのロボットの説明が含まれています。 手動で、またはコンフィギュレーターの助けを借りて説明を作成できますが、詳細はbubot:scoutに関するビデオで説明します。
したがって、最初のロボットの場合、説明は次のようになります。
\ config \ scout_easy.json
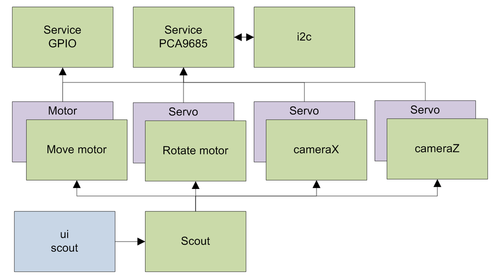
{ "param": { "name": { "value": "scout_easy" } }, "depend_buject": { # "move_motor": { # , , "param": { "buject": { # "value": "MotorTest" }, "name": { # "value": "move_motor" }, "GPIO_forward": { # "value": 20 }, "GPIO_reward": { "value": 21 } } }, "rotate_motor": { # "param": { "buject": { "value": "MotorTest" }, "name": { "value": "rotate_motor" }, "GPIO_forward": { "value": 13 }, "GPIO_reward": { "value": 19 } } } } }
この説明によると、起動時のBubotは、異なるパラメーターでMotorTestモジュールの2つのインスタンスを作成します。1つはメインモーター-move_motor、もう1つはステアリングモーター-rotate_motorで、プロセスとして開始します。 ご覧のとおり、GPIOのアドレス指定方法は指定していません。 デフォルト値には満足していますが、モーター接続図に従ってGPIO_forwardおよびGPIO_backwardパラメーターを再定義しました。
これですべての準備が整いました。 実行できます。
python3 StartBubot scout_easy
ユーザーインターフェイスhttp:// localhost / ui / scout_easyをブラウザで開き、ボタンをクリックしてみます。 最初の起動時に、ユーザー名とパスワードの入力を求められます-値を入力します。デフォルトでは、システムへのアクセス権は設定されていません。
ブボットスカウト
マシンをさらに開発する場合、次のステップは駆動速度の調整、ステアリングモーターのサーボへの交換、カメラの取り付け、カメラのドライブ、音声合成装置、音声コマンドの認識などです。 しかし、これはまったく異なる話です。
bubotをダウンロードする