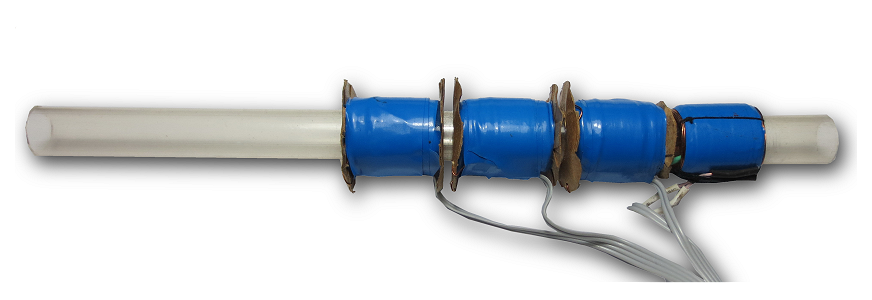
最初から、銃自体の銃身の直径と長さ、および銃の素材を決定する必要があります。 水銀温度計の下から直径10 mmのプラスチックケースを使用しました。 非強磁性特性を備えた利用可能な材料を使用できます。 このガラス、プラスチック、銅管など。バレルの長さは、使用する電磁コイルの数によって異なります。 私の場合、4つの電磁コイルが使用され、バレルの長さは20センチでした。
使用されるチューブの直径に関しては、プロセスで、電磁銃は、使用される発射体に対するバレルの直径を考慮する必要があることを示しました。 簡単に言えば、バレルの直径は、使用する発射体の直径よりも大きくしてはいけません。 理想的には、電磁銃の銃身は発射体自体の下に収まる必要があります。
シェルを作成するための材料は、直径5ミリメートルのプリンターの軸でした。 この素材から2.5 cmの長さの5つのブランクが作成されました。 スチールバーを使用することも可能ですが、たとえば、ワイヤまたは電極から-何がありますか。
発射体自体の重量に注意する必要があります。 可能であれば、重量は軽くする必要があります。 私の貝は少し重かった。

この銃を作成する前に、実験が行われました。 取っ手からの空のペーストを樽として使用し、針をシェルとして使用しました。 針は、電磁銃の近くに取り付けられたマガジンのカバーを簡単に刺しました。
オリジナルのガウス電磁銃は、安全上の理由から、コンデンサを300ボルトのオーダーの高電圧で充電するという原理に基づいて構築されているため、初心者の無線アマチュアには、約20ボルトの低電圧で給電する必要があります。 低電圧は、発射体の範囲がそれほど大きくないという事実につながります。 しかし、再び、それはすべて使用される電磁コイルの数に依存します。 使用される電磁コイルが多いほど、電磁銃の発射体の加速度が大きくなります。 バレルの直径も重要です(バレルの直径が小さいほど、発射体はさらに飛ぶ)および電磁コイル自体の直接の巻線の品質。 おそらく、電磁コイルは電磁銃の装置の中で最も基本的なものであり、最大の飛翔体飛行を達成するためにこれに重大な注意を払う必要があります。
私は私の電磁コイルのパラメータを提供します、あなたは異なるものを持っているかもしれません。 コイルには、直径0.2 mmのワイヤが巻かれています。 電磁コイルの巻線層の長さは2センチで、このような列が6つ含まれています。 私はそれぞれの新しいレイヤーを分離しませんでしたが、前のレイヤーに新しいレイヤーを巻き始めました。 電磁コイルは低電圧で駆動されるため、コイルの最大品質係数を取得する必要があります。 そのため、すべてのターンを互いにきつく巻き、ターンごとにターンします。

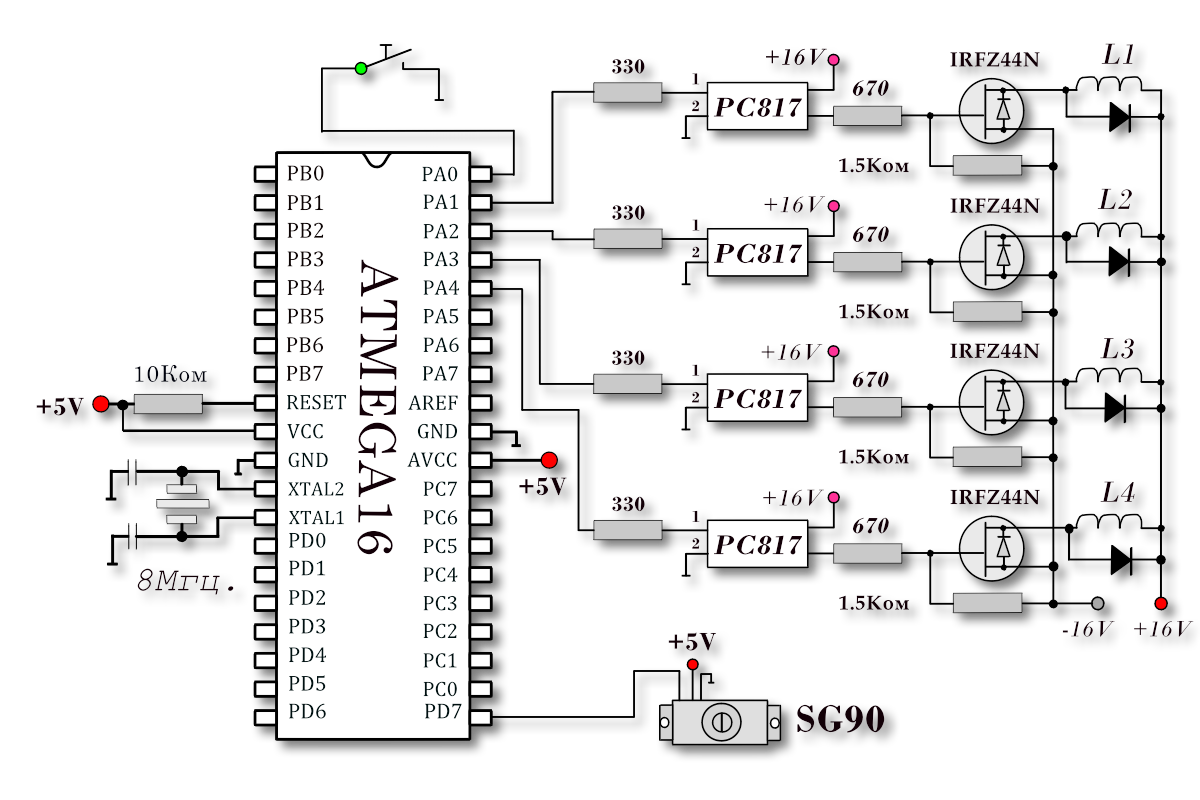
フィーダーに関しては、特別な説明は必要ありません。 プリント回路基板の製造で残った箔テキソライトの廃棄物からすべてがはんだ付けされました。 図では、すべてが詳細に表示されています。 フィーダーの中心は、マイクロコントローラーによって制御されるSG90サーボドライブです。 こちらで購入できます
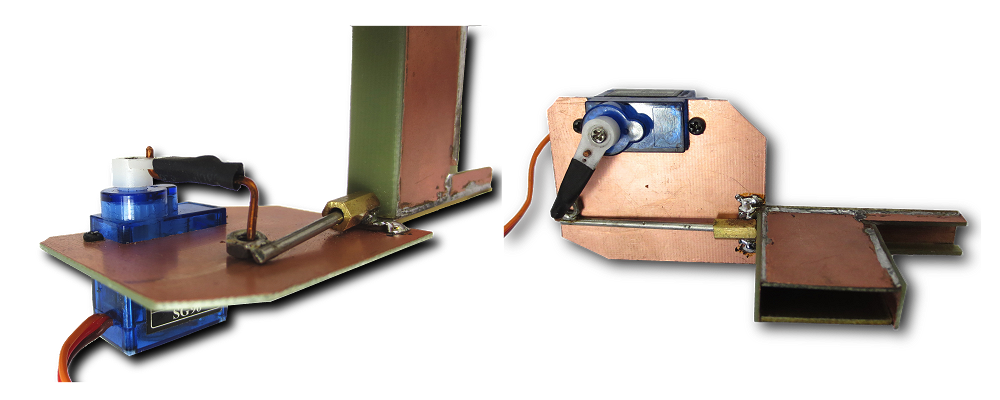
フィードロッドは直径1.5 mmのスチールロッドで作られ、サーボドライブと連結するためにロッドの端にm3ナットがシールされています。 肩を大きくするために、両端で曲がった直径1.5 mmの銅線をサーボドライブのロッカーに取り付けます。
即興の材料から組み立てられたこの単純な装置は、電磁銃の砲身に砲弾を送り込むのに十分です。 フィードロッドはローディングマガジンから完全に出ているはずです。 内径3 mm、長さ7 mmのひび割れた真鍮製スタンドが、フィードロッドのガイドとして機能しました。 捨てるのは残念でした。実際、ホイルのテキソライトのように重宝しました。
atmega16マイクロコントローラー用のプログラムはAtmelStudioで作成され、完全にオープンなプロジェクトです。 実行する必要のあるマイクロコントローラープログラムの設定をいくつか検討してください。 電磁ガンを最も効果的に動作させるには、プログラム内の各電磁コイルの動作時間を調整する必要があります。 セットアップは順番に行われます。 最初に、最初のコイルを回路にはんだ付けし、他のすべてを接続しないでください。 プログラムのプログラム時間(ミリ秒単位)を設定します。
PORTA | =(1 << 1); //コイル1
_delay_ms(350); //労働時間
マイクロコントローラーをフラッシュし、マイクロコントローラーでプログラムを実行します。 コイルの努力は、発射体を引き込み、初期加速を与えるのに十分でなければなりません。 マイクロコントローラープログラムでコイルの動作時間を調整し、2番目のコイルを接続し、時間を調整することで最大の発射体の離脱を達成し、発射体の範囲をさらに広げます。 したがって、最初のコイルはオンのままです。
PORTA | =(1 << 1); //コイル1
_delay_ms(350);
PORTA&=〜(1 << 1);
PORTA | =(1 << 2); //コイル2
_delay_ms(150);
このようにして、各電磁コイルの動作を設定し、それらを順番に接続します。 ガウス電磁銃の装置内の電磁コイルの数が増えると、速度もそれに応じて発射体の範囲も増加するはずです。
各コイルのこの骨の折れるセットアップ手順は回避できます。 しかし、このためには、電磁ガン自体の装置を近代化し、電磁コイルの間にセンサーを設置して、あるコイルから別のコイルへの発射体の動きを追跡する必要があります。 センサーとマイクロコントローラーを組み合わせることで、セットアッププロセスが簡素化されるだけでなく、発射体の範囲が広がります。 私はこれらの機能を実行せず、マイクロコントローラープログラムを複雑にしませんでした。 目標は、マイクロコントローラーを使用して、興味深く複雑でないプロジェクトを実装することでした。 もちろん、それがどれほど面白いかはあなた次第です。 率直に言って、私は子供の頃、このデバイスから「脱穀」し、マイクロコントローラ上のより深刻なデバイスのアイデアが成熟したことに満足していました。 しかし、これは別の記事のトピックです。
プログラムとスキーム -atmel-programme.clan.su/Puhka.zip