まえがき
2013年、ロシアでロボット工学を普及させ、このトピックに焦点を当てたプログラマーおよびエンジニア向けの環境を作成することを目的として、CROC(モスクワ)は「フライングロボット」と呼ばれるコンテストを開催しました。 iKarチーム(Barnaulから3人、モスクワから1人)が2013年(「フライアンドゴーバック」コンテスト)に参加し、2014年(「Catch and Go Krok」)は勝ちませんでしたが、良い結果を達成しました。
1.開始方法または競技の条件
専門職による1Cプログラマーであるため、多くの場合、forum.mista.ruフォーラムを使用する必要があります。 私の仲間の友人の一人が、「To Lemon」というトピックに関する広告に最初に気づき、参加を申し出ました。
コンテストの条件は魅力的に見えました。飛行ロボットを構築または購入し、トレーニンググラウンドでの移動/ナビゲーション、自動離着陸、着陸マーカーの認識方法を教える必要がありました。 すべての作業の期間は1年で、賞金は100万ルーブルです。
趣味と航空写真のプロ用の両方で、ヘリコプターとクアドロコプターの建設の経験がありました。 さまざまな設定、PID係数、コード、およびフライトコントローラーアルゴリズムについて多くの質問がありました。 競争の動機を使用して、すべてを深く理解することができました。
子供の頃から、ロボット工学に携わることは夢でしたが、競争に参加することで、この方向への第一歩を踏み出すことができました。 自分の強さ、「正当な」理由、「おいしい」賞を信じて、仕事をし、家族の予算全体と利用可能なクレジットを使って、「予算」ドローンロボットを構築し、コンテストのためにモスクワに旅行しました。
2.航空機プラットフォームの選択
 航空機(LA)として使用できるもの:
航空機(LA)として使用できるもの:
1)既製のドローン、たとえば、マイナスから、すでに飛行することができる「AR.Drone」と多くのグッズ:
-鉄の生産性が低い。
-低い収容力。
2)必要な積載量と必要な飛行時間で独自の航空機を構築します。
2番目のポイントは疑いの余地はありませんでした。カメラと必要な電子機器を搭載したときの推定積載量2 kg、推定時間20分のヘキサコプター(6モーターヘリコプター)は優れた選択肢でした。 テストのために、小さなクワドロコプター、つまり「鞭打ち少年」を作ることが決定されました。

Tarot-680フレームに基づくヘキサコプター

「ホイップ」用のクワッドコプター
セキュリティの問題に特に注意が払われました-すべてのヘリコプターにはネジ保護が装備されていました。 したがって、壁との衝突後または落下後、すべてが無傷のままでした。 これにより、費用と修理時間が節約されました。
3.ドローン2013の電気回路
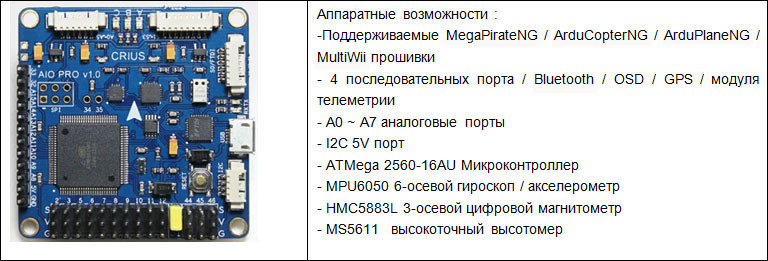
タスクをより迅速に解決し、人件費を削減するために、たとえば、すべての計算を実行するシングルボードコンピューターに基づいてすべてを行うよりも、既製のモジュールからドローンを構築することが決定されました。 したがって、たとえば、航空機を水平に保ち、飛行を安定させることができるフライトコントローラーを購入し、別のデバイス(マイクロコントローラー、コンピューター)を使用して制御できます-センサーと無線モデムからデータを受信するオートパイロット(後で詳しく説明します)前方、後方などに移動するためのフライトコントローラーへのコマンド オートパイロットは、すべての知的作業(ナビゲーションなど)も実行します。
画像の分析(着陸マーカーの決定)はかなり難しいタスクであるため、計算は十分に強力なマイクロコンピューターを使用してボード上で実行するか、分析を基地局(ラップトップ)のドローンの外部で実行し、ドローンからの画像をWifiまたはアナログ経由で基地局に送信する必要がありますビデオ送信機。 したがって、マーカーの認識により、次の回路が得られました(アナログビデオトランスミッターを使用)。
1)航空機のカメラからの画像がビデオ送信機を介して送信された。
2)基地局のビデオ受信機で受信された。
3)ビデオキャプチャ(VIDEO-> USB)を介してラップトップにアナログビデオ信号が入力された。
4)ラップトップでは、プログラム(OpenCV)を使用して画像が認識されました。
5)「見た」マーカーの画面座標(X、Y)は、無線モデムを介して自動操縦装置に送信されました。
6)受信したスクリーン座標に基づいて、自動操縦装置はドローンに対する着陸地点マーカーの位置を決定し、着陸または着陸のためのナビゲーションについて決定しました。

航空機の電気回路図2013
4.フライトコントローラーを選択する
フライトコントローラーが利用可能でした-MultiWii ALL-IN-ONE; 既存のFPVクアドロコプターから削除されました:
飛行特性の面では、この飛行制御装置は手動制御では悪くありませんが、より強力なハードウェアと数学を備えたプロ用の制御装置に比べて安定化品質が著しく劣ります。
標準ファームウェアでロボットに使用する場合、ファームウェアが調整されたため、MultiWiiを構成できませんでした。
プロジェクトにOpenPilotやPixHawkなどのオープンファームウェアを備えたプロ仕様のコントローラーを使用する方が合理的ですが、当時は不可能でした。
5.センサーを選択
宇宙でのオリエンテーションでは、ドローン用のセンサーを選択する必要がありました。
選択リスト:

手頃な価格のセンサーと使いやすさの中には、超音波ソナーとIRセンサーがありました。 予算の超音波範囲はIR(最大1.5メートル)よりも大きい(最大4.5メートル)ため、無人機のメインセンサーとして選択されました。
合計5個が必要でした。1個のソナーが下に向けられて高さを保持し、4個が必要でした。 壁からのオリエンテーションのための周囲のまわり。

超音波センサーを正しく動作させるためには、超音波センサーをよく研究する必要がありました。 より深く安全な研究のために、ソナーが設置された地上のロボットタンクが建設されました。 タンクは、障害物、たとえば移動可能な紙切れまで所定の距離を保ち、ロボットはそれ自体の背後を移動しました。 データはログに記録されたため、分析してニュアンスを判断することは難しくありませんでした。
 超音波ソナーは、有効角度(放射パターン)、距離測定範囲などのさまざまな特性によって分類できます。 さらに、測定の品質はセンサーのさまざまな特性に大きく依存します。 たとえば、幅の広いソナーは、距離が測定される表面からの大きな偏差に対してはうまく機能しますが、幅の狭いソナーは失われます。 また、モデルに応じてさらに広範囲に「ヒット」し、ほぼすべての表面(アスファルト、布地など)からの距離を測定します。 しかし、これらには小さな欠点があります-狭いターゲットとは対照的に、測定結果はわずかに「ジャンプ」します。したがって、取得した値をフィルタリングする必要があります。
超音波ソナーは、有効角度(放射パターン)、距離測定範囲などのさまざまな特性によって分類できます。 さらに、測定の品質はセンサーのさまざまな特性に大きく依存します。 たとえば、幅の広いソナーは、距離が測定される表面からの大きな偏差に対してはうまく機能しますが、幅の狭いソナーは失われます。 また、モデルに応じてさらに広範囲に「ヒット」し、ほぼすべての表面(アスファルト、布地など)からの距離を測定します。 しかし、これらには小さな欠点があります-狭いターゲットとは対照的に、測定結果はわずかに「ジャンプ」します。したがって、取得した値をフィルタリングする必要があります。
 ソナーは「質の高い」栄養を要求し、そうでなければ、彼らの証言は「飛び跳ね」、それらをナビゲートすることは不可能でした。 質の高い栄養を得るには、パワーフィルターを使用するか、個別のDC-DCを用意する必要があります 。完全な推奨事項はこちらをご覧ください 。 タンクが不要になった後、おもちゃになりました。 カメラを機内に設置した(ソナーを取り外した)状態で、FPVを使用してアパート内を走ることができました。
ソナーは「質の高い」栄養を要求し、そうでなければ、彼らの証言は「飛び跳ね」、それらをナビゲートすることは不可能でした。 質の高い栄養を得るには、パワーフィルターを使用するか、個別のDC-DCを用意する必要があります 。完全な推奨事項はこちらをご覧ください 。 タンクが不要になった後、おもちゃになりました。 カメラを機内に設置した(ソナーを取り外した)状態で、FPVを使用してアパート内を走ることができました。

タンクに関する詳細: forum.rcdesign.ru/blogs/45616
6.オートパイロットを選択するか、少しハンダ付けを選択します
ソナーからデータを読み取り、ナビゲーションの決定を下し、フライトコントローラーにデータを送信するには、別の計算機であるオートパイロットが必要でした。 Atmegaファミリーのコントローラーの知識があったため、2晩でポーリングボードをAtmega162(DIPパッケージで唯一のコントローラーで、地元のラジオストアで購入できる2つのUARTポートを持っている)にはんだ付けしましたが、その後Atmega128に置き換えられました(ファームウェアは成長せず、コントローラのメモリに既に収まっています)。
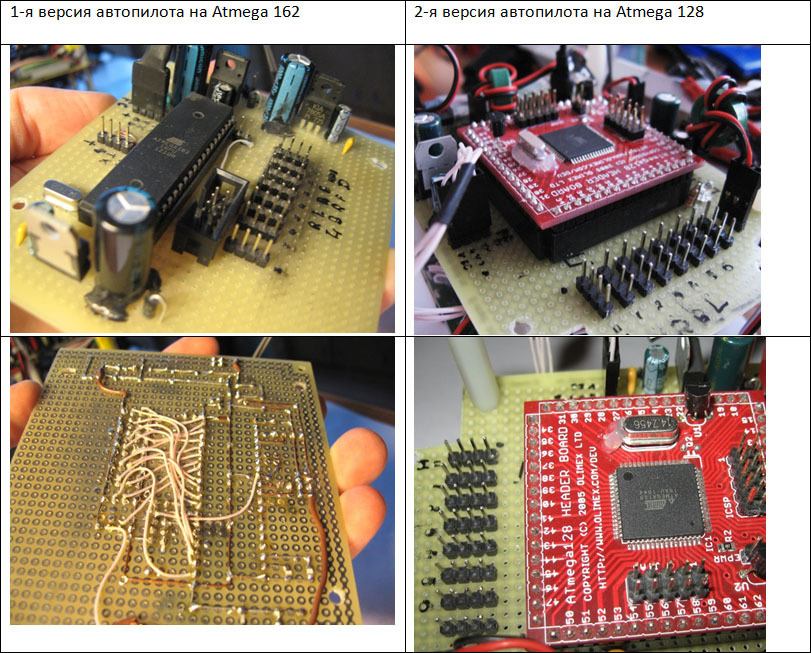
ボード上のピンは、ソナーを接続するためのコネクタです。 Arduinoコントローラーと比較してこれらのコントローラーを使用する主な利点は、JTAGを介してデバッガーでコードをデバッグ(デバッグ)できることです! つまり、いつでもプログラムを停止して、変数、カウンタなどの値、エラーが発生した場合にステップバイステップでプログラムの原因を見つけることができます。
7.高く保つことを学ぶ
開発/テストを短時間で迅速に行うために、どこかを運転して貴重な時間を無駄にする代わりに、アパートでテストを実施することにしました。 再考することなく、12平方メートルの部屋にテストベンチが作成されました。 メートル。
 フックが天井とフィールドにねじ込まれ、その間に強力なパラグライダーラインが張られていました。 垂直ガイドがドローンのフレームに取り付けられました-カーボンチューブ。 上部には、ヘリコプターが天井に立てかけられないようにするリミッターがありました。 その結果、ヘリコプターは垂直にしか移動できませんでした。これは、ヘリコプター自身とヘリコプターが高度保持のPID係数を調整するのに安全であるために必要でした。
フックが天井とフィールドにねじ込まれ、その間に強力なパラグライダーラインが張られていました。 垂直ガイドがドローンのフレームに取り付けられました-カーボンチューブ。 上部には、ヘリコプターが天井に立てかけられないようにするリミッターがありました。 その結果、ヘリコプターは垂直にしか移動できませんでした。これは、ヘリコプター自身とヘリコプターが高度保持のPID係数を調整するのに安全であるために必要でした。

埋め立て地の詳細については、ビデオをご覧ください。
PIDのセットアップに多くの時間が費やされましたが、個人的な経験と実践に基づいた規制メカニズムと十分な取引をすることができました。 また、高さを保持するためにソナーのモデルを決定しましたが、これはかなりうまく機能しました-これらはワイド方向のDYP-ME 007 v1.0です。 人気のあるHC-SR04の性能は低下しました。
スタンドで「ライブ」で作業したおかげで、良い結果を得ることができました。ヘリコプターは完全に所定の高さを保ちました。
8.コンパスに関するコースまたは少しの開催
次の問題の1つは、機首方位(ヨー軸)でした。つまり、ヘリコプターがそれ自体の軸の周りを回転しません。 フライトコントローラーに搭載されたコンパスを使用する決定は、一見簡単なものでしたが、モスクワでは主催者の訓練場(送電線など)で働くことを拒否したため、その後は受け入れられませんでした。 ただし、このソリューションにより、アパートでのテストを続行し、次のタスクに進むことができました。

モスクワでは、テストでコンパスをナビゲートすることが不可能であることが判明した後、コンパスをオフにし、ヨー軸に沿って保持する独自のアルゴリズムを作成することが判明しました。 これを行うには、計算された角度Yawの値を入力しました(ちなみに、Open Pilot CCD3フライトコントローラーでは、コンパスが搭載されていないため、この角度も計算され、回転角度はセットアッププログラムで確認できます)。 角度値はジャイロスコープからのデータ(ヨー軸に沿った角加速度)に従って計算され、経験的に式を選択しました。 次に、静止状態でこの値が5分間でどれだけ逃げるかを測定し(一方向にわずかなドリフトがありました)、一定の間隔でこの角度を調整して、結果のドリフトをゼロに減らしました。 すべてがテーブル上で完璧に機能しました。ヘリコプターでは、強い振動がなければ、これも機能するはずです。
9. 1つの壁から距離を保つ
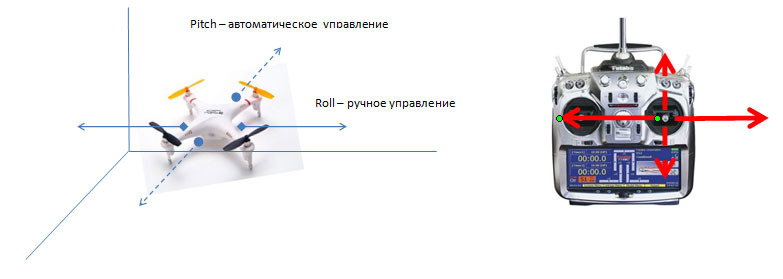
(ピッチ軸に沿って)前後方向の位置を自動的に保持するために、ヘリコプターの前に1つのソナー(狭角HY-SRF-05)を固定しました。 コントロールパネルから、ヘリコプターの左右の動きを手動で制御し(ロール軸上)、PIDコントローラーの調整に失敗した場合、ヘリコプターのドリフトを前後に修正しました。コンソールのスティックが中心から10%ずれると、ヘリコプターは手動制御に切り替わりました。軸の前後(ピッチ)。
コントローラーのPID(PID)を調整し、その係数を整理することで多くの苦労をしたので、3つの制御係数を取得しました。
P位置(P位置)。調整誤差が、壁からの望ましい距離とソナーによる電流との差と見なされる場合。
D-位置(D位置)、\から壁への移動速度。
D速度(D速度)、\から壁への移動の加速。
(I)-速度ではなく位置の係数は考慮されませんでした= 0。
真実のさらなる検索は、すでにフライトコントローラーのコードに変換されています。 MultiWiiコードで判明したように、コードの多くの設定は経験的に選択されています。 あなたは手で飛ぶことができますが、ロボットにとっては、すべてがうまく機能しませんでした。 PIDコントローラーを書き換えて同じ方法で行うことにしました。PおよびD位置+ D速度。ArduPilotフライトコントローラーコードから借用したフィルターと組み合わせて、「よく」結果を得ましたが、確かにプロのコントローラーとは比較できません。
すべてを組み合わせたとき、50 cmの高さで水平に1メートルの範囲に保ち、高さを高くしようとすると、ドリブルの範囲も拡大しました。
10.残りのソナーを接続し、ソナーのコラボレーションをセットアップする
音には反射する性質があるため、あるソナーからの反射信号が別のソナーにキャッチされないように、ソナーを順番にインタビューします。 使用されたソナーの最大ポーリング周波数は20 Hzであり、ソナーを順番にインタビューすると(5つあります)、それぞれ4 Hzの周波数でポーリングされます。 要するに、unningなアルゴリズムのおかげで、その本質は「興味のない」ソナー(たとえば、前方に移動するときの後方のソナー)を調べることでした-5 Hzを受信しました(原則として1秒間に5回、悪くはありません!)
安定性に関して、次の考えがありました。
 明らかに、ソナーが尋問される頻度が高いほど(尋問頻度が高くなるほど)、ヘリコプターをより正確に配置できますが、頻度が重要であるだけでなく、システムの応答時間、または壁までの距離とモーターへの影響などの直接測定間の遅延も考慮されます測定距離。
明らかに、ソナーが尋問される頻度が高いほど(尋問頻度が高くなるほど)、ヘリコプターをより正確に配置できますが、頻度が重要であるだけでなく、システムの応答時間、または壁までの距離とモーターへの影響などの直接測定間の遅延も考慮されます測定距離。
現在のシステムは受信した値にどれくらいの速さで応答しますか、ドローンは測定にどれくらいの速さで応答しますか?
 このような状況は簡単に想像できます。たとえば、ビデオカメラからの情報が1〜2秒の遅延で(モニターまたは眼鏡を介して)目に入った場合、周波数は1秒あたり25フレームのままですが、動きやすいでしょうか? 落ちないようにゆっくりと行かなければなりません。 さて、例えばこのようにロープを歩こうとすると?
このような状況は簡単に想像できます。たとえば、ビデオカメラからの情報が1〜2秒の遅延で(モニターまたは眼鏡を介して)目に入った場合、周波数は1秒あたり25フレームのままですが、動きやすいでしょうか? 落ちないようにゆっくりと行かなければなりません。 さて、例えばこのようにロープを歩こうとすると?
別の例を次に示します:月からの月面探査車からの信号は3秒遅れで到着しますが、この時間は火星から数分で測定され、地上から制御することは不可能です(探査車の速度は非常に遅くなります)。
結果のドローンシステムの応答時間を計算します。
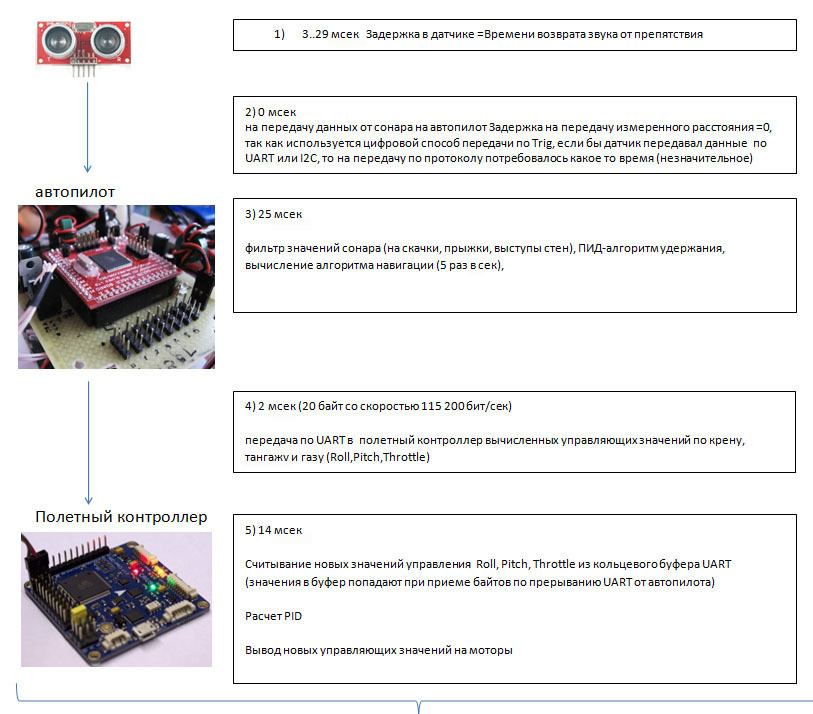
以前の合計遅延:3..29 + 0 + 25 + 2 + 14 = 44..70 ms。
詳細な説明:
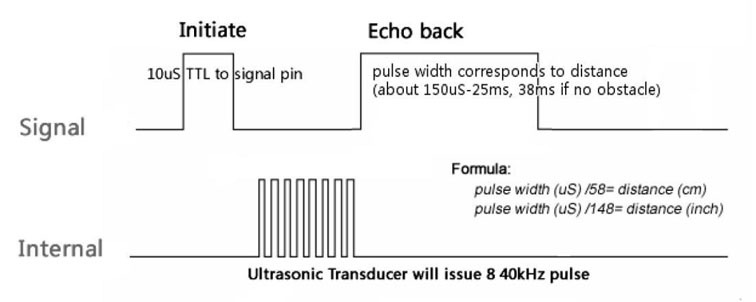
1)距離を測定するための信号(トリガ)がソナーに供給された後、超音波モジュールは超音波信号を発し、障害物からの反射後に信号音が戻るまで一定の時間が経過します。 この時間はソナーセンサーに記録され、センサーのアナログまたはデジタル出力を介して出力されます。
2)ソナーのデジタル出力(エコー)を使用したため、反射エコーを受信することで信号(+)が生成されるため、自動操縦コントローラーにすぐに記録されます(割り込みにより)-実際には、たとえば、バージョンとは異なり、測定距離が遅延なく送信されますUARTまたはI2C送信。エコーを受信すると、ソナーコントローラーがデータを順次送信し、自動操縦コントローラーがデータを受信する必要があります。
3)自動操縦コントローラーによって取得された値が計算され、フィルタリングされます。 計算された壁または床までの距離は、壁または床から遠ざけることにより、自動操縦PIDコントローラーに「供給」されます。 その結果、ロール制御(ロール)、ピッチ(ピッチ)、およびスロットルの新しい値を取得します。
4)受信した制御値(ロール、ピッチ、スロットル)は、UARTポートを介してフライトコントローラー(MultiWii)に送信されます。
5)フライトコントローラーはデータをリングバッファーに読み込み、一定時間(1秒間に50回)後にそのPIDをコントローラー(実際にはマルチwii安定化システム)に「フィード」し、その後、制御アクションの新しい値が混合されます(スキームに応じて)航空機(クアドコプター、ヘキサコプターなど)およびエンジンコントローラーに供給されます。
連続的なソナーポーリングサイクルは20 Hzであるため、各ソナーに費やすことができる時間は50ミリ秒以下です。 ソナーは距離を決定するのに最大29ミリ秒かかり、それに応じて計算(フィルター、PID、パス選択アルゴリズム)に21ミリ秒が残ります。
この時間(21ミリ秒)は低速の8ビットコントローラーには不十分であることが判明したため、前のソナー値からの制御アクションが50ミリ秒間隔で計算され、現在のソナー値が現在のサイクルに単純に読み込まれるオプションが考案されました。 このソリューションにより、システムの反応時間は50ミリ秒増加しましたが、低パフォーマンスの鉄のこのような構成で存在することができました。
合計遅延(ラグ)= 44..70ミリ秒+ 50ミリ秒= 94..120ミリ秒。実際、この遅延は、測定された距離に対する現在のシステムの反応です。
明らかに、反応が遅いほど、PIDコントローラーとセンサーのポーリングレートでのデバイスの動作が不安定になります。 つまり、デバイスの安定性は、ポーリングセンサーの周波数だけでなく、測定された距離(遅延値または応答時間)に対する航空機システムの「反応」にも依存します。
11.可能な最適化
現在のシステムの遅延をどのように減らすことができますか? 最適化オプション:
 1)自動操縦用の高速コントローラー、たとえばAWP(172 MHz 32ビット)を使用する
1)自動操縦用の高速コントローラー、たとえばAWP(172 MHz 32ビット)を使用する
値25ミリ秒-距離の計算と送信を伴うPIDコントローラーを含む2ミリ秒に減らすことができます(-23ミリ秒)。
これにより、1回のポーリングサイクルで計算を読み取って実行できるようになりますが、これはまだ(-50ミリ秒)です。
最適化中の合計遅延(遅延)= 94..120ミリ秒-23ミリ秒-50ミリ秒= 21..47ミリ秒
 2)さらに有利な解決策は、フライトコントローラーと自動操縦装置が1つの高速コントローラーまたはコンピューターである場合、自動操縦装置からフライトコントローラーへの情報転送時間を節約し、飛行制御装置安定化システムの動作頻度を高めるため、回路はさらに高速になります( MultiWiiでは、この周波数は約300 Hzです)
2)さらに有利な解決策は、フライトコントローラーと自動操縦装置が1つの高速コントローラーまたはコンピューターである場合、自動操縦装置からフライトコントローラーへの情報転送時間を節約し、飛行制御装置安定化システムの動作頻度を高めるため、回路はさらに高速になります( MultiWiiでは、この周波数は約300 Hzです)
12.自立吊り下げ(壁からの距離を維持+高さを維持)

ソナーに沿って高さを維持し、壁の1つからの距離を多かれ少なかれ維持した後、3番目のソナーをヘリコプターの左側または右側に固定し、自動モードで部屋にハングアップすることを学ぶことができました。 しかし、ヘリコプターは各軸に沿ってぶら下がり、最終的に反時計回りに回転し、振幅を得ました。 マイナスは、ドローンが「ゆるやかに」コースを維持したこと(ヨー軸)、特にデバイスを壁の近くでねじったことでもありました。 また、ある壁から別の壁に移動すると、装置は少し高さを失い、壁の前でブレーキをかけ、高さを獲得しようとしたため、ほぼ反対方向に発砲しました。 ヨーに大きなPID値を設定すると、デバイスは壁の近くでねじれる瞬間に可能な限り整列しようとしたため、ほぼ2つの対角エンジン(ヨー軸に沿ってマルチローターシステムを制御する機能)で作業中に、制御を失いました(実際には4つのモーターのうち2つしか回転していなかったため) xをクアドロコプターで)、壁に飛びました。
コース(ヨー軸)でデバイスを安定させ、自動操縦装置とフライトコントローラーのPIDを選択するのに多くの時間が費やされました。 また、ビルドアップを排除するために、デバイスの動作に関するいくつかの手法を考案する必要がありました。 その結果、ほぼ安定した動作になります。
13.迷路ナビゲーション
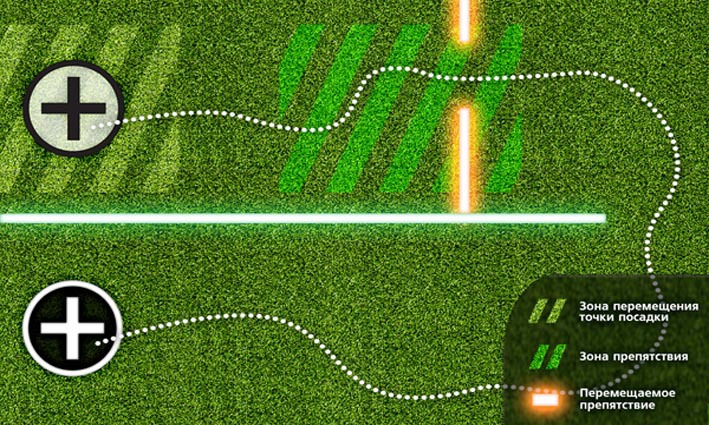
競争の激しいトレーニング場を通過するために複雑なアルゴリズムとマップ構築を使用する必要はありませんでした;迷路「右手のルール」を巡回するための最も簡単なアルゴリズムが登場しました。 少し変更して、ステートマシンで実行しました。 簡単に言えば、本質はいくつかの単純な移動規則にあります。
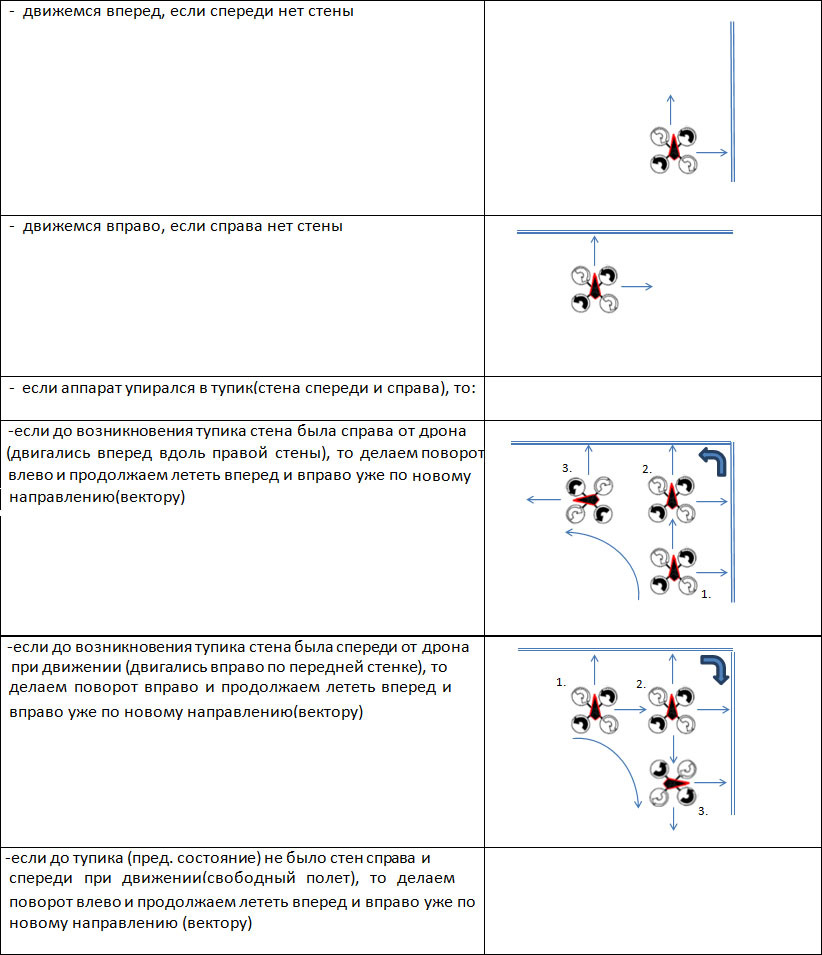
航空機を前方/後方/右側/左側に移動するために、自動操縦装置は適切なコマンドをフライトコントローラーに送信して、プラットフォームを対応する方向に傾けます。 移動方向の壁がソナーで「見えない」場合、プラットフォームは5度傾斜します(手動で角度を選択しました)。 ドローンが加速しないように、一定間隔でドローンは水平位置を取り、慣性で移動します(どちらの方向にも傾くことはありません)。さらに、粗い速度制御にGPSレシーバーが使用されました。速度が臨界速度(経験的に選択された)より上に固定されると、ドローンの速度が低下します。つまり、移動方向とは反対方向にずれます。距離センサー-ソナーの可視範囲内での移動の場合、壁からの保持距離は単に変化します。
14.ランドマークマーカーの検出
 カメラがドローンに取り付けられ、画像はビデオ送信機を介してラップトップに送信されました。さらに、マーカーが検出(認識)された場合、マーカーのスクリーン座標のデータが自動操縦装置に送信されました。得られたデータに基づいて、自動操縦装置は、ヘリコプターと可視壁(「パラグラフ3」で詳細に説明)に対する「ターゲット」までの距離を計算しました。その後、彼はこの距離を維持しようとし、着陸プログラムがオンになり、ホバリングの高さがゆっくりと減少しました。
カメラがドローンに取り付けられ、画像はビデオ送信機を介してラップトップに送信されました。さらに、マーカーが検出(認識)された場合、マーカーのスクリーン座標のデータが自動操縦装置に送信されました。得られたデータに基づいて、自動操縦装置は、ヘリコプターと可視壁(「パラグラフ3」で詳細に説明)に対する「ターゲット」までの距離を計算しました。その後、彼はこの距離を維持しようとし、着陸プログラムがオンになり、ホバリングの高さがゆっくりと減少しました。

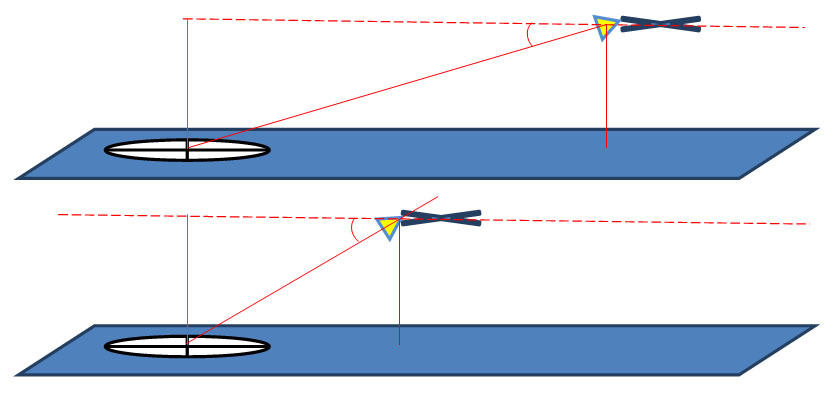
ロボットの最終バージョンでは、カメラの回転機構を実装することができました(カメラはピッチ軸に沿って上下に回転しました)。したがって、目標追跡メカニズムが編成され、十字架に近づくと、カメラは向きを変え、着陸地点の中心をカメラの注意の中心に保ちました。したがって、「ターゲットを追跡する」時間が増加し、その結果、着陸の精度も向上しました。
サークル内のクロスマーカーの認識は、Open CVを使用して実行され、線の交差を検索するアルゴリズムが使用されました。この作業は、プロジェクトの最後の条件で作業に接続したチーム内の個人によって行われました。

15.モスクワへの旅行
競争に参加するためにすべてのコントロールポイントを通過したため、私たちのチームは決勝に参加することが許可されました。旅行の時点では、ヘキサコプターをベースにした新しいプラットフォームですべてが準備できていなかったため、モスクワのテストサイトで最終的な準備をすることが決定されました。

埋め立ては、テストプロセス中に完了しました。

コンテストは2日間に分けられ、いくつかの写真は主催者のウェブサイトで見ることができます。




始める前に:

駐車場の待合室。
私たちのチームの最初の試みは失敗し、ロボットは飛び上がりましたが、フェンスをつかんで床に触れましたが、離陸して勇気を持って戻ってきました。
ナビゲーションの2回目の試みでは、すべてが成功し、ロボットは壁に触れず、着陸マーカーに着地しませんでしたが、マーカーはラップトップのベースステーションでよく認識されました。
そして、競争の後、それは往復の着陸を伴う、飛行のほぼ完璧なバージョンであることが判明しました。
まとめ
私たちのチームでは、飛行ロボットのプロジェクトの作業に4人が参加しました。一人は認識に責任があり、一人はC言語の優れた専門家であり、AVRコントローラーに精通しており、プロジェクトの困難な時期に相談しました。チームキャプテンとして、ドローンの設計、プログラミング、テストを行い、妻はモスクワ旅行中に組織の問題に対処しました。また、ロボットをテストするための前提条件-テストの根拠。家、ガレージ、オフィスを提供してくれた友人に感謝します。一見小さな結果にもかかわらず、多くの作業が行われました。時間の90%は、プロジェクトが移動しなければ、新しい組織的な問題の調査、テスト、および困難の克服に費やされました。
2013年の競技会には多くの参加者が集まり、テストの決勝戦では競技中に同僚と少し話すことができました(残りの時間は無人機の完成とセットアップに費やされました)。
競技会では、気象条件により写真が少し損なわれ、主催者を含むほとんどの参加者は無線接続(wifi)に問題がありました。私たちを含む多くの人にとって、コンパスが実際の訓練場(電源ケーブルなど)で機能しないことは、テストで驚きでした。
一般に、「大人」のための最初の競争のためにそれは非常にうまくいった。

競争のリストソース:
www.robots.croc.ru
habrahabr.ru/company/croc/blog/192704
habrahabr.ru/post/193304