これは解決策ではありません! 一緒に考えてみましょう!
私たちは現実的なバイアスで現実的であり、OpenGLバージョン3.3をテストの対象とします。 このバージョンから、各開発者はマトリックス操作モジュールを個別に実装する必要があります。 素晴らしい、これが私たちに必要なものです。 困難なタスクの分解を実行し、主要なポイントを強調します。 OpenGL仕様からのいくつかの事実:
- 行列は列に格納されます(列メジャー)。
- 同次座標
- 左手座標系の標準クリッピングボリューム(CVV)。
行列を保存するには、列優先と行優先の2つの方法があります。 線形代数に関する講義では、行優先方式が使用されます。 概して、単純な転置によってマトリックスは別のタイプの表現に常に変換できるため、メモリ内のマトリックスの表現は重要ではありません。 そして、違いがないため、その後のすべての計算では、古典的な行優先行列を使用します。 OpenGLをプログラミングするとき、古典的な行優先の計算を維持しながら、行列の転置を拒否できる小さなトリックがあります。 マトリックスは、シェーダープログラムにそのまま転送する必要があります。シェーダーでは、ベクトルにマトリックスを掛けるのではなく、マトリックスにベクトルを掛けます。
同種座標は、通常のデカルト座標を同種座標に、またはその逆に変換するためのいくつかの単純なルールを備えた非常にトリッキーなシステムではありません。 同次座標は、次元[1x4]の行行列です。 デカルト座標を同次座標に変換するには、 x 、 y 、 zに実数wを掛ける必要があります(0を除く)。 次に、最初の3つのコンポーネントに結果を書き込む必要があり、最後のコンポーネントは係数wと等しくなります。 言い換えれば:
 -デカルト座標
-デカルト座標
wは0に等しくない実数です
 -同次座標
-同次座標
ちょっとしたトリック: wが1に等しい場合、変換に必要なのは、コンポーネントx 、 y 、およびzを転送し、ユニットを最後のコンポーネントに割り当てることだけです。 つまり、行列の行を取得します。

wとしてゼロについてのいくつかの単語。 同次座標の観点からは、これはまったく受け入れられます。 同種座標により、点とベクトルを区別できます。 デカルト座標系では、このような分離は不可能です。
( x、y、z )がデカルト座標である点です
 ベクトルです。( x、y、z )は半径ベクトルです
ベクトルです。( x、y、z )は半径ベクトルです
同次座標からデカルト座標への頂点の逆変換は、次のように実行されます。 行行列のすべてのコンポーネントは、最後のコンポーネントに分割する必要があります。 言い換えれば:
 -同次座標
-同次座標
 -デカルト座標
-デカルト座標
知っておくべき主なことは、すべてのOpenGLクリッピングおよびラスタライズアルゴリズムがデカルト座標で機能することですが、それ以前は、すべての変換が均一な座標で実行されます。 同次座標からデカルト座標への移行は、ハードウェアで行われます。
Canonicalビューボリューム(CVV)は、OpenGLの数少ないドキュメント化された部分の1つです。 図からわかるように 1 CVVは、原点を中心とし、エッジの長さが2に等しい軸方向に整列した立方体です。 CVVエリアに分類されるものはすべてラスタライズの対象となり、CVVの外側にあるものはすべて無視されます。 CVVを部分的に超えるものはすべて、クリッピングアルゴリズムの対象となります。 知っておくべき最も重要なことは、CVV座標系が左利きであることです!
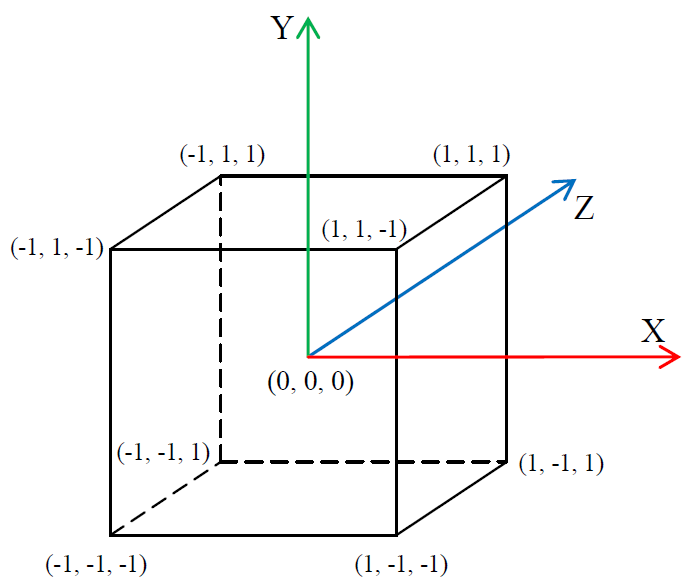
図 1. Canonical OpenGL Clipping Volume(CVV)
左側の座標系? OpenGL 1.0の仕様で、使用されている座標系が右利きであることが明確に示されているのはどうですか? 正しくしましょう。
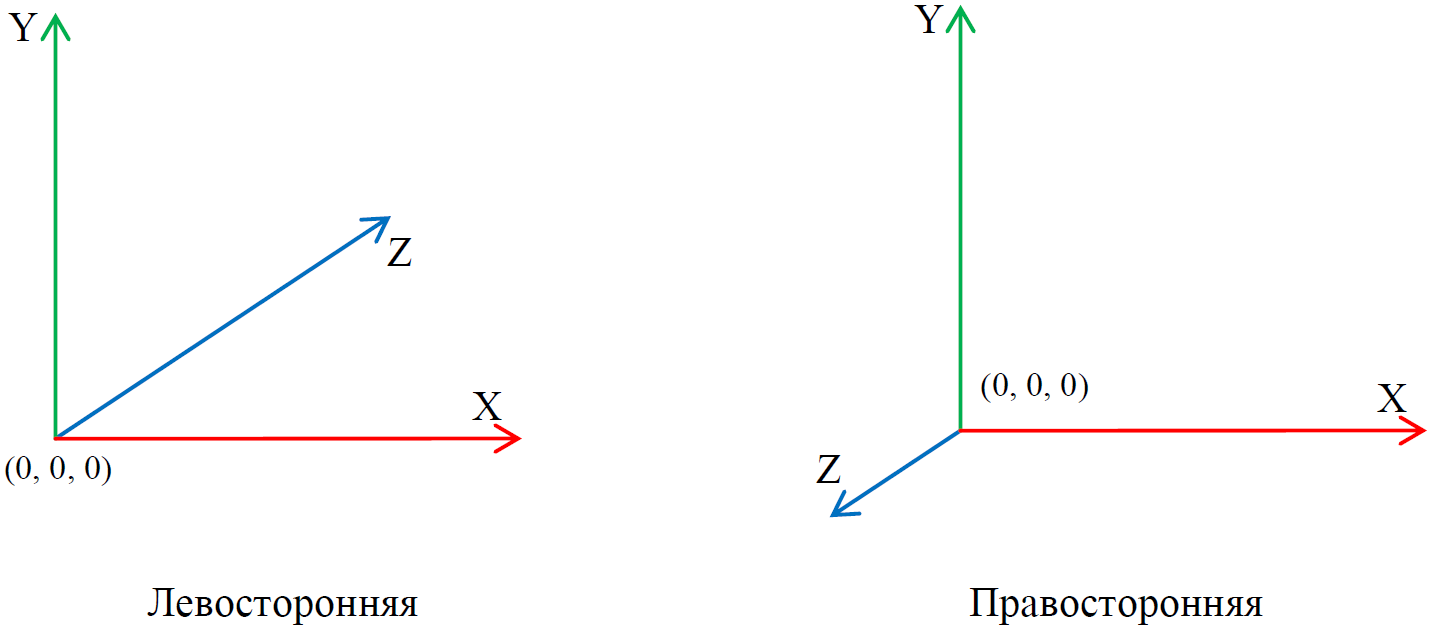
図 2.座標系
図からわかるように 2つの座標系は、 Z軸の方向のみが異なります。 OpenGL 1.0は実際に右利きのユーザー座標系を使用します。 ただし、CVV座標系とユーザー座標系はまったく異なるものです。 さらに、バージョン3.3以降では、標準のOpenGL座標系のようなものはなくなりました。 前述のように、プログラマー自身がマトリックス操作モジュールを実装します。 回転行列の形成、射影行列の形成、逆行列の検索、行列乗算-これは、行列演算モジュールに含まれる演算の最小セットです。 2つの論理的な質問があります。 可視性の範囲がエッジの長さが2の立方体である場合、何千もの任意のユニットのシーンが画面に表示されるのはなぜですか? ユーザー座標系はどの時点でCVV座標系に変換されます。 射影行列は、これらの問題に対処する本質です。
上記の主な考え方は、開発者自身がユーザー座標系のタイプを自由に選択でき、投影行列を正しく記述する必要があるということです。 ここでOpenGLの事実が終わり、すべてをまとめる時が来ました。
最も広範で理解が難しいマトリックスの1つは、透視変換のマトリックスです。 それでは、CVVとユーザー座標系にどのように関係していますか? 観測者までの距離が長くなるとオブジェクトが小さくなるのはなぜですか? オブジェクトが距離の増加とともに減少する理由を理解するために、3次元モデルのマトリックス変換を段階的に見てみましょう。 3次元モデルが、互いに完全に独立して行列変換を行う頂点の有限リストで構成されていることは周知の事実です。 2次元モニター画面上の3次元頂点の座標を決定するには、以下を行う必要があります。
- デカルト座標を同次座標に変換します。
- 同次座標にモデル行列を乗算します。
- 結果に種マトリックスを掛けます。
- 結果に投影行列を乗算します。
- 結果を同次座標からデカルト座標に転送します。
デカルト座標の同次座標への変換については、前に説明しました。 モデル行列の幾何学的な意味は、モデルをローカル座標系からグローバル座標系に変換することです。 または、彼らが言うように、モデル空間からピークをワールド空間に持ち込むこと。 ファイルからロードされた3次元オブジェクトがモデル空間にあり、その座標がオブジェクト自体を基準にして測定されているとしましょう。 次に、モデルマトリックスを使用して、モデルの配置、スケーリング、回転を行います。 その結果、3次元モデルのすべての頂点は、3次元シーンの実際の同次座標を受け取ります。 ワールド空間に相対的なモデル空間はローカルです。 座標は、モデル空間からワールド空間に(ローカルからグローバルに)転送されます。 このために、モデル行列が使用されます。
次にステップ3に進みます。 ここで種空間が働き始めます。 この空間では、座標は観測者の位置と向きを基準にして、まるで世界の中心であるかのように測定されます。 ビュー空間はワールド空間に対してローカルであるため、座標を入力する必要があります(前の例のように作成しないでください)。 直接マトリックス変換は、空間から座標を取り出します。 逆に、それらを入れるには、マトリックス変換を逆にする必要があります。したがって、種変換は逆マトリックスによって記述されます。 この逆行列を取得する方法は? 最初に、観測者の直接行列を取得します。 オブザーバーの特徴は何ですか? 観察者は、自分がいる座標とビューの方向ベクトルによって記述されます。 観測者は常に自分のローカルZ軸の方向を見ます。 オブザーバーはステージを動き回ってターンできます。 多くの点で、これはモデル行列の意味に似ています。 概して、そのとおりです。 ただし、オブザーバーにとって、スケーリング操作は無意味です。したがって、オブザーバーのモデル行列と3次元オブジェクトのモデル行列の間に等号を置くことはできません。 オブザーバーのモデル行列は、目的の直接行列です。 この行列を反転すると、種行列が得られます。 実際には、これは、グローバルな同次座標のすべての頂点が、観測者に関連する新しい同次座標を受け取ることを意味します。 したがって、観測者が特定の頂点を見た場合、種空間におけるこの頂点の同次座標zの値は確実に正の数になります。 頂点が観測者の背後にある場合、種空間でのその均一座標zの値は間違いなく負の数になります。
ステップ4は最も興味深いステップです。 前のステップは意図的に詳細に検討されているため、読者は第4ステップのすべてのオペランドの全体像を把握できました。 4番目のステップでは、同次座標をビューポートからCVV空間に移動します。 繰り返しますが、潜在的に見えるすべての頂点が同次座標zの正の値を持つという事実が強調されます。
次の形式の行列を考えます:

そして、観測者の同次空間内の点:

均質な座標に検討中の行列を掛けます:
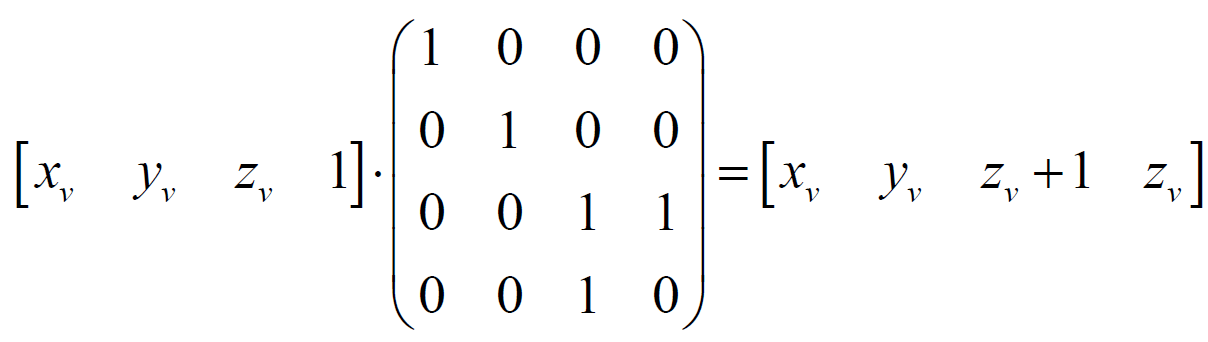
結果の同次座標をデカルト座標に変換します。
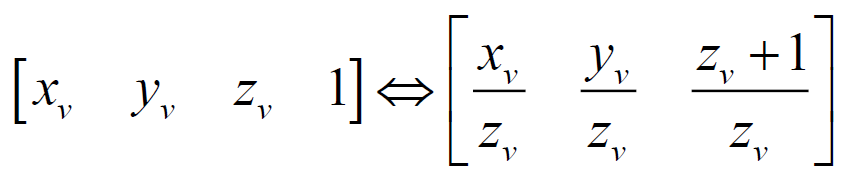
ビューポートに2つのポイントがあり、 x座標とy座標が同じで、 z座標が異なるとします。 つまり、ポイントの1つが他のポイントの後に配置されます。 遠近法の歪みのため、観察者は両方の点を見る必要があります。 実際、 z座標による除算により、原点への圧縮が発生することが式からわかります。 z値が大きいほど(ポイントが観測者から遠いほど)、圧縮が強くなります。 遠近法の効果について説明します。
OpenGL仕様では、クリッピングおよびラスタライズ操作はデカルト座標で実行され、同種座標をデカルト座標に変換するプロセスは自動的に行われます。
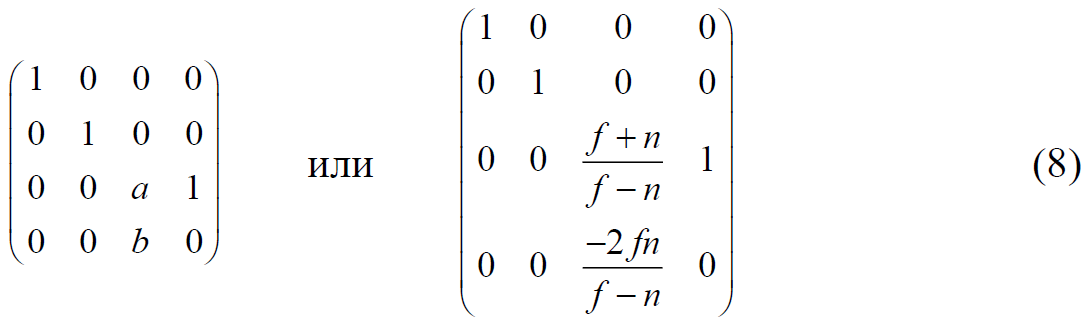
マトリックス(1)は、マトリックス透視投影のテンプレートです。 前述のように、投影マトリックスタスクは2つのポイントで構成されます。ユーザー座標系の設定(左側または右側)、観察者の可視性のCVVへの転送です。 左利きのユーザー座標系の透視行列を導き出します。
投影行列は、4つのパラメーターを使用して説明できます(図3)。
- ラジアン単位の視野角( fovy );
- アスペクト比
- 近くのクリッピング平面までの距離( n );
- ファークリッピングプレーンまでの距離( f )。
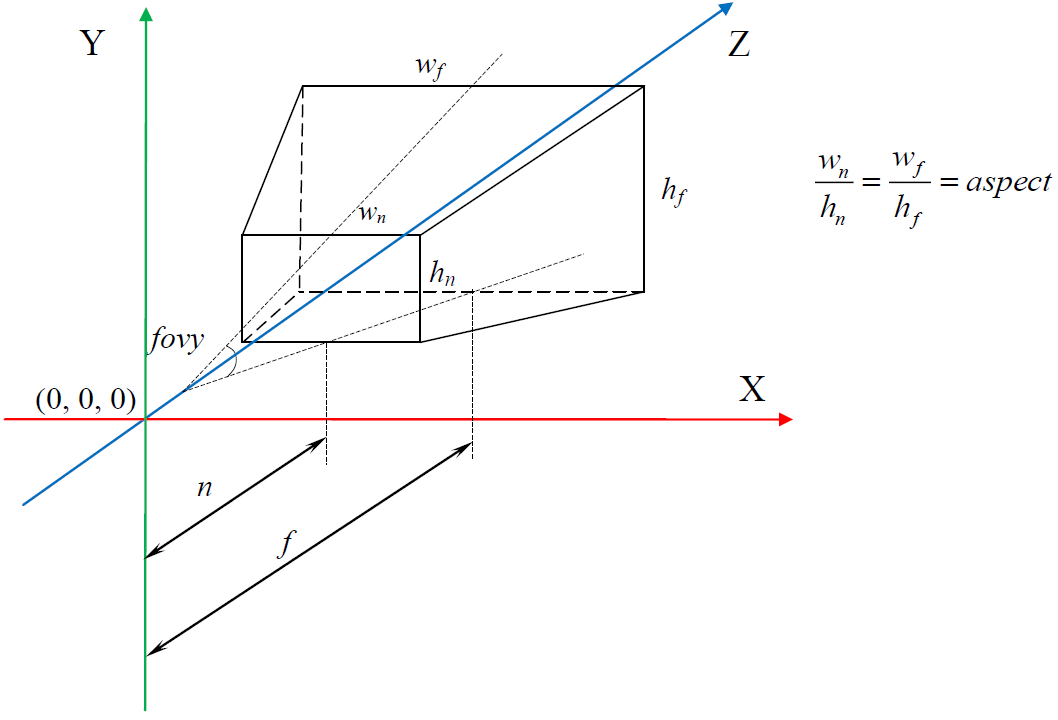
図 3.将来の範囲
有望な可視性ボリュームの正面カットオフ面への観測者空間の点の投影を検討してください。 わかりやすくするために、図 図4は側面図である。 また、ユーザー座標系はCVV座標系と一致することに注意してください。つまり、左側の座標系はどこでも使用されます。
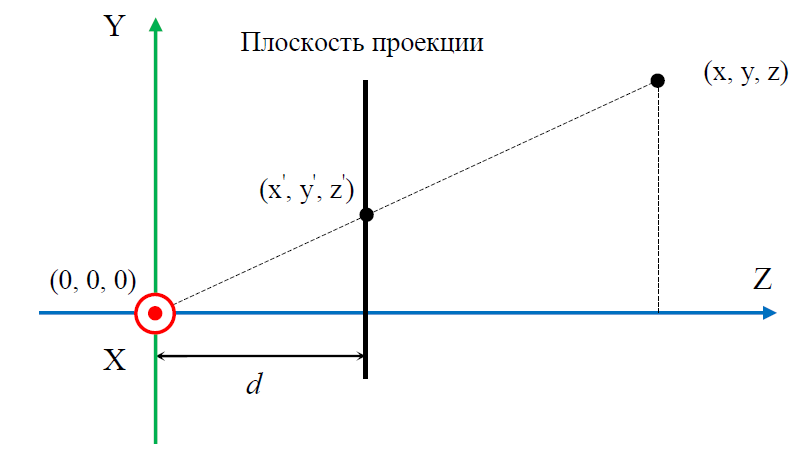
図 4.任意の点を投影する
このような三角形のプロパティに基づいて、次の等式が真になります。

yꞌおよびxꞌを表現します。

原則として、投影点の座標を取得するには式(2)で十分です。 ただし、3次元オブジェクトを正しくシールドするには、各フラグメントの深さを知る必要があります。 つまり、 zコンポーネントの値を保存する必要があります。 この値は、OpenGL深度テストで使用されます。 図 図 3は、 zꞌの値がフラグメントの深さとして適切ではないことを示しています。 これは 、ポイントのすべての投影がzꞌの同じ値を持つことができるためです 。 この状況から抜け出す方法は、いわゆる疑似深度の使用です。
擬似深度プロパティ:
- 疑似深度は、 zの値に基づいて計算されます。
- ポイントが観測者に近ければ近いほど、擬似深度の重要性は低くなります。
- 可視性ボリュームの前面にあるすべてのポイントでは、擬似深度の値は-1です。
- 可視ボリュームのカットオフの遠方面にあるすべてのポイントの場合、疑似深度の値は1です。
- 可視ボリューム内にあるすべてのフラグメントは、範囲[-1 1]の疑似深度値を持ちます。
擬似深さを計算する式を導きましょう。 基礎として、次の式を使用します。

係数aおよびbを計算する必要があります。 これを行うために、疑似深度3および4のプロパティを使用します。2つの未知数を持つ2つの方程式のシステムを取得します。

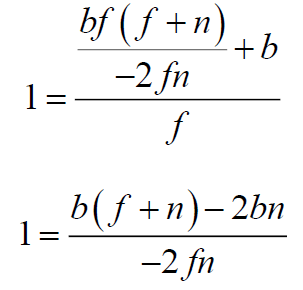
システムの両方の部分を追加し、結果に積fnを掛けて、 fとnをゼロにすることはできません。 取得するもの:

ブラケットを開き、用語を並べ替えて、左側にaのある部分のみ、右側にbだけが残るようにします。

(5)に(6)を代入します。 式を単純な分数に変換します。
両側に-2fnを乗算しますが 、 fとnはゼロにはなりません。 同様のものを与え、用語を並べ替えてbを表現します。

(7)を(6)に代入し、aを表現します。
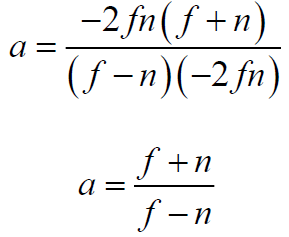
したがって、コンポーネントaおよびbは次と等しくなります。

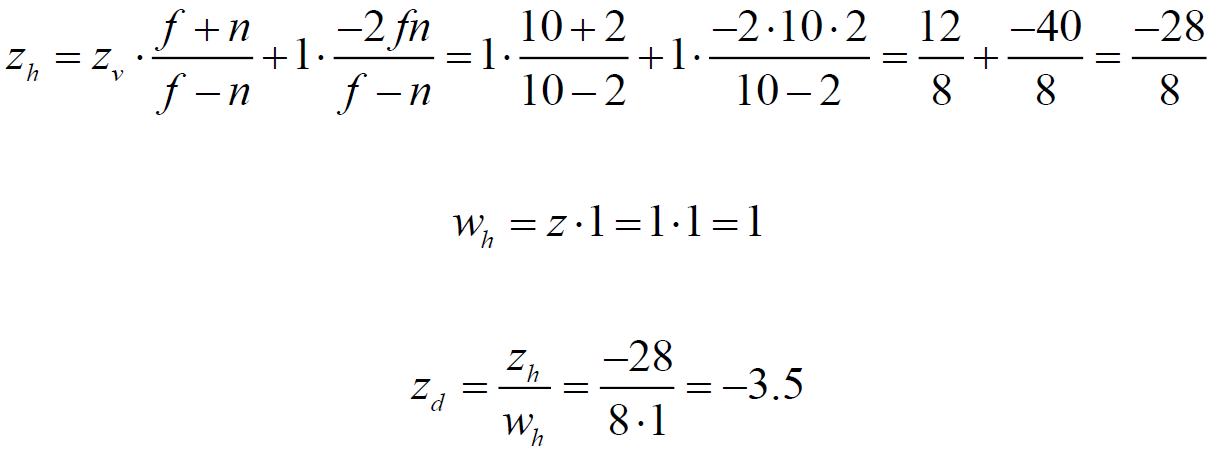
ここで、取得した係数を空白行列(1)に代入し、均質な観測空間の任意の点のz座標に何が起こるかを追跡します。 置換は次のように実行されます。
前方クリッピング平面までの距離nが2に等しく、遠方クリッピング平面までの距離fが10に等しいとします。同種の観測空間内の5つの点を考えます。
| ポイント | 価値 | 説明 |
|---|---|---|
| 1 | 1 | ポイントは、可視性ボリュームの前面クリッピングプレーンの前にあります。 ラスタライズを渡しません。 |
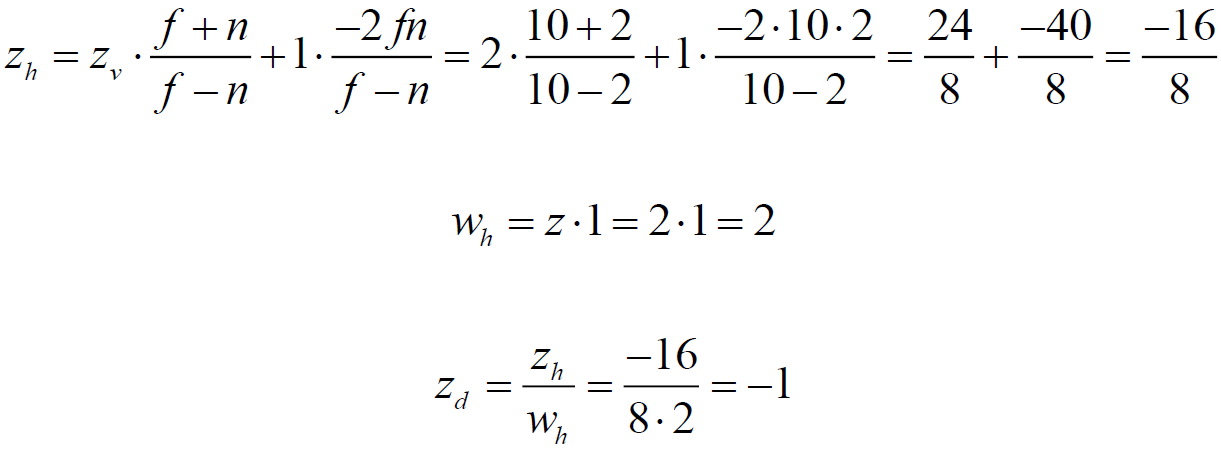
| 2 | 2 | ポイントは、クリッピング可視ボリュームの前端にあります。 ラスタライズされています。 |
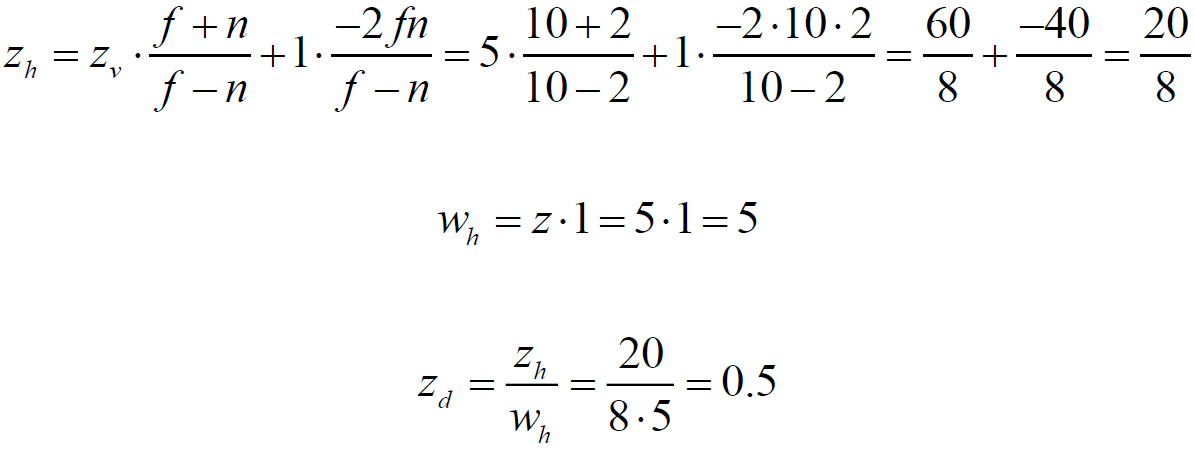
| 3 | 5 | ポイントは、可視ボリュームの前面のカットオフフェースとファーカットオフエッジの間にあります。 ラスタライズされています。 |
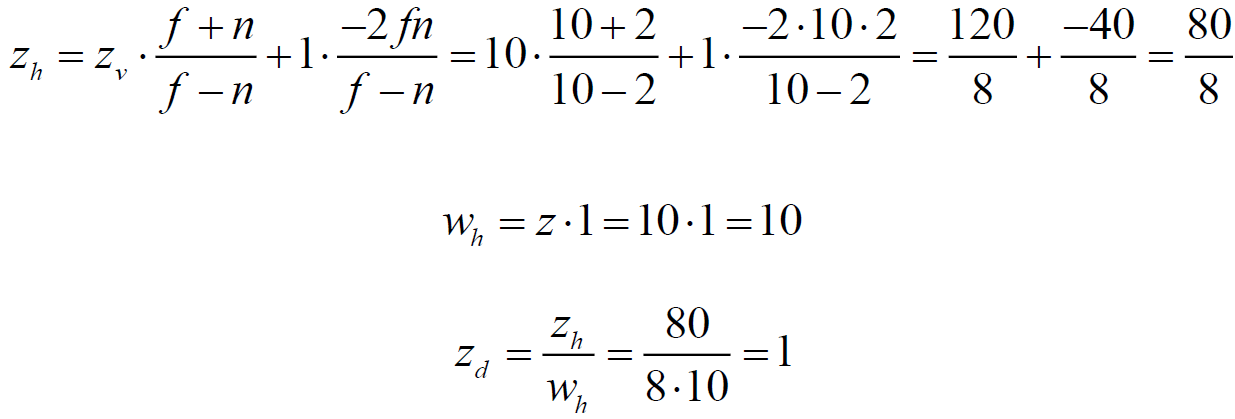
| 4 | 10 | ポイントは、可視性のクリッピングボリュームの反対側にあります。 ラスタライズされています。 |
| 5 | 20 | ポイントは、可視性のクリッピングボリュームの遠端を超えて配置されます。 ラスタライズを渡しません。 |
すべてのポイントに行列(8)を乗算し、結果の同次座標をデカルト座標に変換します
ポイント1:
ポイント2:
ポイント3:
ポイント4:
ポイント5:
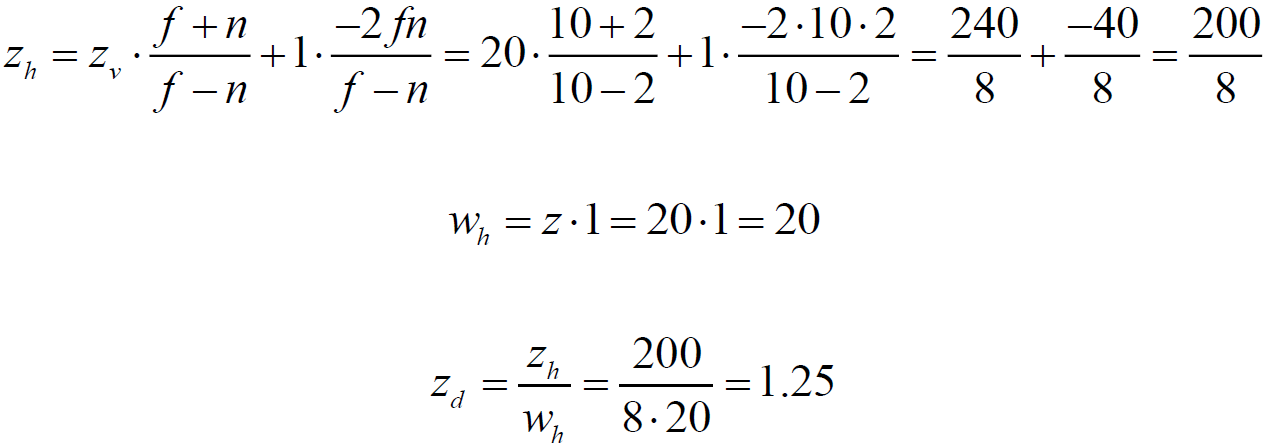
均一な座標に注意してください
z座標を計算し、 x座標とy座標に進みましょう。 前述のように、可視性の見込み範囲全体がCVVに収まる必要があります。 CVVリブの長さは2です。 したがって、見通しのボリュームの高さと幅は、2つの任意の単位に圧縮する必要があります。
角度とアスペクト値があります。 これらの値を使用して高さと幅を表現しましょう。
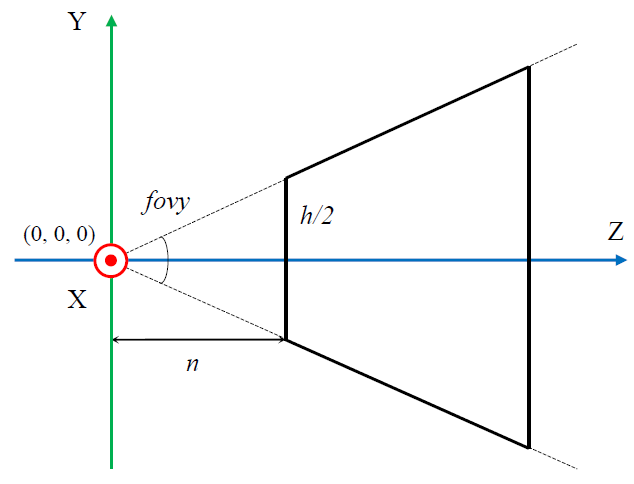
図 5.可視性の範囲
図から 5は次のことを示しています。
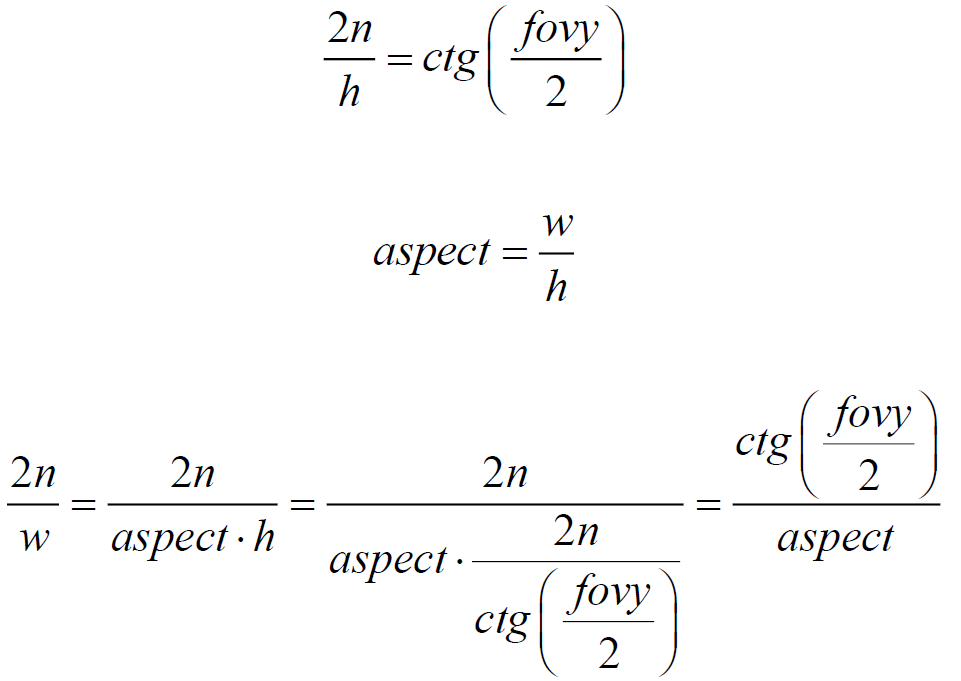
これで、CVG OpenGLで動作するカスタム左側座標系の透視投影行列の最終ビューを取得できます。

これが行列の結論です。
OpenGLの主要なライバルであるDirectXについて一言。 DirectXは、CVVの寸法と位置のみがOpenGLと異なります。 DirectXでは、CVVはx軸とy軸に沿った長さが2に等しい長方形の箱であり、 z軸に沿った長さは1です。 xとyの範囲は[-1 1]、 zの範囲は[0 1]です。 CVV座標系については、OpenGLと同様に、DirectXは左手座標系を使用します。
ユーザーの右手座標系の透視行列を表示するには、図を再描画する必要があります。 Z軸の新しい方向を考慮した2、図3、図4。 さらなる計算は完全に類似しており、サインに正確です。 DirectX行列の場合、疑似深度3および4のプロパティは範囲[0 1]に変更されます。
このトピックでは、有望な行列は閉じていると考えることができます。
有用な文献
1. グラフィックパイプライン
2. 同次座標
3. Lanterman A.ビデオゲーム用のマルチコアおよびGPUプログラミング
4. リンデマンRW CS 543-コンピューターグラフィックス:投影
5. Segal M.、Akeley K. The OpenGL Graphics System:A Specification(バージョン3.3(コアプロファイル)-2010年3月11日)
6. Song HA OpenGLプロジェクションマトリックス
7. OpenGLシェーディング言語バージョン3.30
8. チュートリアル12-透視投影
9. イグナテンコA.同次座標
10. 視点変換