サーボを備えたシステムで不要な要素を回避し、鉄を最大限に使用する方法に関する短い投稿
背景
私は非常に長い間病気にかかっており、Linux、OpenWRT、ネットワークおよびワイヤレステクノロジー、セキュリティに悩まされていましたが、今では徐々にロボット工学やスマートホームに感染しています。 これはすべて、特に既製のテンプレート、無料のオープンソースコードが非常に多い場合、非常にクールであり、時には完全に悪の側面に行き、ロジックをスクラッチにすばやく投げることができます。
ただし、LEDが点滅するだけでなく、関心が目覚め、すごい効果が渡され、適用された問題を解決する必要があります。 ここでも完成品の豊富さを賞賛すべきだと思われますが、悪魔はいつものように詳細にあります。
/
ロジックを制御することの1つです。これにより、ライトのオン/オフが簡単になります。また、大気質センサー(MQ-135)を拾い、必要に応じてフードをオンにすることもできます。 これはすべてクールですが、21世紀の中庭では、宇宙船が素晴らしい劇場を耕し、魂はもっとクールなものを求めます。 私の視線はサーボの制御に落ちました。 どうして? トピックは、ロボットから単純な栓抜きまで、多くのメカニズムに存在するため、非常に広範囲です。 プラスは、航空機ではエンジンが同じ方法で制御され、これにより使用範囲が単純に拡大するという事実です。
キャットの下で招待する興味のある人
長い間トピックに精通しており、ポイントにまっすぐに行きたい人-「 ステップバイステップ 」セクションにスクロールしてお気軽に。
最初から始める
このノートの本質は誰もが理解できるものであったため、まずサーボのコンポーネントに注意を払う必要があります。

電気モーター、ギアボックス、ポテンショメーター、コントローラー。 独創的なものはすべてシンプルですね。
サーボドライブの制御には、パルス幅変調またはPWMが使用されます。 複雑なことは何もなく、それは単なる矩形パルスの形の信号です。 主なパラメータは、パルス幅とポーズ幅です。 「一時停止」、または正しく呼び出す方が良い-期間は、信号の周波数を設定します。 たとえば、100 msの周期幅がある場合、周波数は10 Hzになります。 計算は非常に簡単です。ミリ秒を秒に変換し、この数値で単位を除算します。 したがって、100ms = 0.1sで、1を0.1で割ると10になります。電卓で確認できます。
パルス幅はサーボの回転角度を設定し、航空機モーターの場合は回転の速度と方向を設定します。
概略的には、次のようになります。

そして、このようなオシロスコープで:

次に、サーボがこのような信号をどのように認識するかについて説明します。 そして、悪魔は細部まで静かに忍び寄っています。
実際には、コントローラーはデジタルでもアナログでもかまいません。
それが完全に単純な場合、違いはアナログコントローラーがインパルスの瞬間にのみ電圧を供給するか、または供給しないことです。 パルス間隔を40、120、またはたとえば240ミリ秒に設定すると、動作中にサーボがどのように「ぴくぴく」動き始めるかがわかります。 これは、マイクロ回路が内部にあり、サーボドライブ全体の周波数が外部信号の周波数に等しいためです。 標準の20ミリ秒は50 Hz、40ミリ秒は25 Hzです。 したがって、電圧がモータ50に供給される(または供給されない)または毎秒25回。 周波数を下げることで、トルクを大幅に減らし、メカニズムのより遅い動作を実現できますが、既に説明した「けいれん」を犠牲にします。
通常、デジタルコントローラーはストラップ付きの小さなマイクロプロセッサです。 アナログマイクロ回路との主な違いは、動作の内部周波数が一定であることです。 制御信号の周波数を好きなだけ減らすことができます。これは反応時間にのみ影響しますが、トルクは一定です。 ただし、長い間隔で小さな部分で位置の変化を与えると、遅い回転速度を実現できます。 すでに特定のサーボとそのパラメーターに依存しています。
信号を生成する方法は?
このために、彼らは通常何らかの種類のマイクロコントローラーを使用し、Arduinoプラットフォームに特別な愛を持っています。 すべてがシンプルです。 既製のライブラリが使用され、信号パラメーターを目的の関数に供給し、目的の幅の指定されたGPIOでパルスを取得します。
しかし、メインデバイスとペアになっているマイクロコントローラーと、問題を解決するためのコントローラー自体のパワーを使用する方法がない場合はどうでしょうか? 代替オプションを探すことは残っています。 そして、私はそのようなものを持っています!
タイトルからすでに明らかなように、OpenWrtオペレーティングシステムが使用されます。 これは本質的に本格的なLinuxカーネルディストリビューションです。 そして、十分な機会とカスタマイズの柔軟性を提供します。 OpenWrtとその派生物は、さまざまな「スマートホーム」システムで積極的に使用されていますが、その詳細については別の記事で説明しています。 PWM(またはブルジョアPWM)信号を生成する方法は? Arduinoほど複雑ではないことがわかりました。 これを行うには、同じGPIOを使用する必要があり、ライブラリの代わりにPWM-GPIO-Customと呼ばれるカーネルモジュールを使用する必要があります。 動作するOpenWrtの最後の安定バージョンは12.09ですが、これを理解するために現在のトランクで動作させるために約1週間を費やしました。 理由はわかりませんが、公式リポジトリにはこのモジュールのパッケージはなく、自分で組み立てる必要がありますが、それほど難しくありません。 以下に方法を書きます。
順を追った説明
そのため、まずはOpenWrtビルドツールキットをダウンロードする必要があります。 正直に言うと、Linuxのインストールから始める必要がありますが、多くの人がすでにこのポイントを完了していることを願っています。
だから、あなたはツールキット用のフォルダを作成し、そこに行きました
コマンドを使用してソースをダウンロードできます
git clone git://git.openwrt.org/12.09/openwrt.git
ウィンドウの下部に端末がありますか?
申し訳ありませんが、これは非常に便利です。
ダウンロード後、openwrtフォルダーに移動し、コマンドを使用してパッケージをダウンロードする必要があります
git clone git://git.openwrt.org/12.09/packages.git
これで、すべてのパッケージソースコードができました。 しかし、待ってください...しかし、pwm-gpio-customはどうですか? 彼はそこにいません。
絶望しないでください、 彼はここにいます
openwrt / package内のコンテンツを解凍するだけで、すべて問題ありません。
ここで、アセンブリに直接渡します。
openwrtフォルダーから、-jn
make -jn kernel_menuconfig
実行する必要があります
nの代わりに、コアの数+ 1に置き換える必要があります。
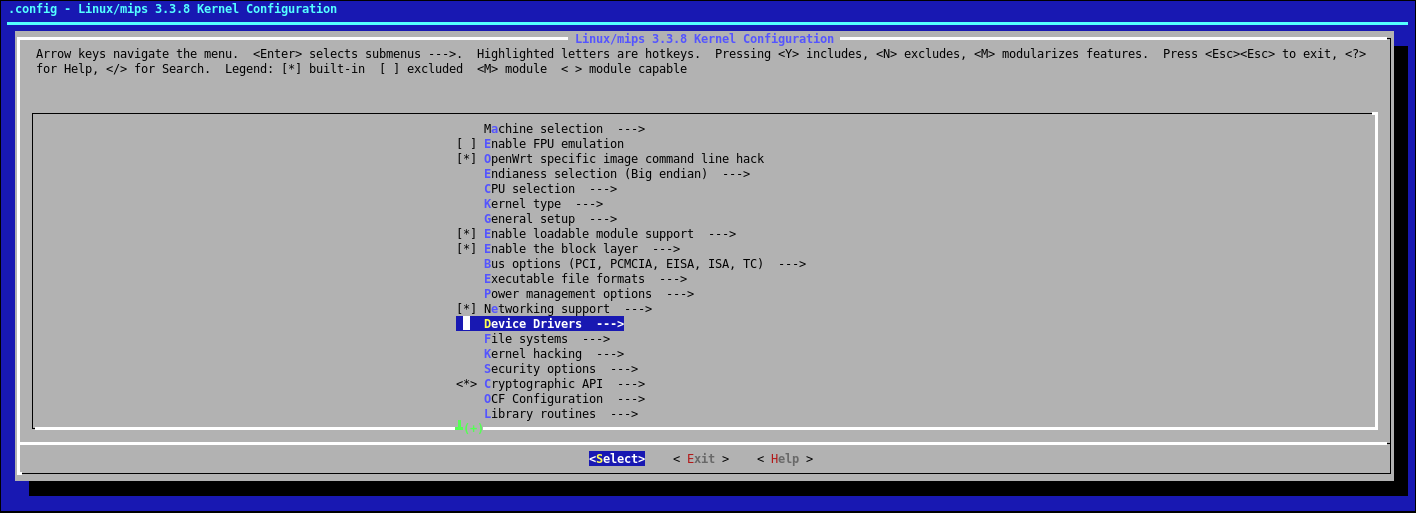
青いメニューが開きます。 [デバイスドライバ]を選択します。
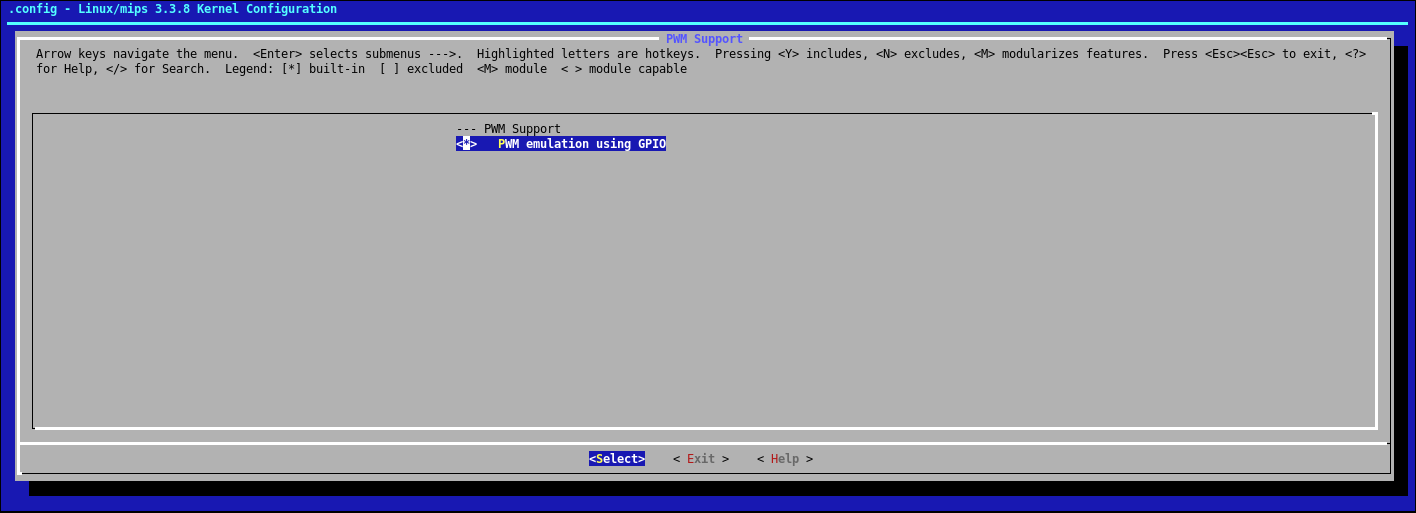
PWMサポートを検索:

GPIOを使用してアイテムPWMエミュレーションをアクティブにします。 スペースを選択してください。 どこにでも星があることが必要です、これは重要です:
その後、カーネルを少し再構成する必要があります。 適切なアイテムを探しています:

[高解像度タイマーサポート]項目にアスタリスクを付け、タイマーの頻度を1000HZに設定し、[プレプションモデル]パラメーターで[低遅延デスクトップ]を選択します。

ルーターのハードウェアプラットフォームを確実に知る必要があります。 しかし、もっと重要なのは、構成で指定することです。 このAtheros ar71xxがあります:


必要なカーネル構成が完了しました。 ここで、最後のExitをクリックするとすぐに、システムは変更を保存する価値があるかどうかを尋ねるので、肯定で答える必要があります。
次に、コマンド
make -jn menuconfig
使用して、同じ方法でOSのアセンブリを構成する必要があります。
次に、[カーネルモジュール]メニューで:

他のモジュールを選択:

そして、kmod-pwm-gpio-customにアスタリスクを付けます:

すべて、組み立てを開始できます。 すべて同じ
make -jn
後ろに寄りかかって何かを見ることが残っています。お茶/コーヒーを飲むことができます。組み立てプロセスは速くありません。
ビルドが完了すると、 binフォルダーに移動できます。 プラットフォームと画像を含むフォルダーがあります。 標準の指示に従って完全にフラッシュできます。 ファームウェアプロセスが完了するとすぐに、telnetを安全に通過できます。 kmod-pwm-gpio-customパッケージをデバイス自体に追加ダウンロードする必要があります。 これは、SCPまたはwgetを介して行うか、openssh-sftp-serverをインストールしてFileZillaを使用します。
ROMはゴム状ではなく、このディレクトリは物理的にRAM(通常は32〜64 Mb)にあるため、パッケージ自体を/ tmpディレクトリにダウンロードすることをお勧めします。 パッケージをダウンロードした後、
opkg install /tmp/kmod-pwm-gpio-custom_xxx.ipk.
必要があります
opkg install /tmp/kmod-pwm-gpio-custom_xxx.ipk.
パッケージの名前をあまり気にすることはできません。TABの自動補完はうまく機能します。
PWM信号生成
パッケージをインストールした後、GPIOの直接制御とPWM信号の生成に進むことができます。
これを行うには、カーネルモジュールをアクティブにする必要があります。 これを行うには、
insmod pwm-gpio-custom bus0=0,23 bus1=1,20
コマンド
insmod pwm-gpio-custom bus0=0,23 bus1=1,20
これは、その方法のほんの一例です。 busXは、
/sys/lass/pwm
同じ番号の下で、キャラクターデバイスを介して制御できるバスの番号を設定します。そのうちの2つがあります: gpio_pwm.0:0およびgpio_pwm.1:0 。 対応する変数をファイルに書き込むだけで、PWMパラメーターを操作できます。 はい、ほとんど忘れていました。すべての値はナノ秒で設定されています。 行こう:
echo 10000000 > /sys/class/pwm/gpio_pwm.0\:0/period_ns
期間を指定します。 この場合、100 Hzです。
echo 8500000 > /sys/class/pwm/gpio_pwm.0\:0/duty_ns
デューティサイクルを指定します。
はい、デフォルトでは一部の結論が反転します。期間内の「ボイド」の時間を設定する必要があります。 GPIOのHigh値が1の場合、
echo 1500000 > /sys/class/pwm/gpio_pwm.0\:0/duty_ns
を設定する必要があります。パルス自体の時間が示されます。
経験的に確認できます。 たぶん私は見つけるか、誰かがあなたをより美しくする方法を教えてくれるでしょう=)
現在は、信号をアクティブにするためだけに残っています。
echo 1 > /sys/class/pwm/gpio_pwm.0\:0/run
そして、オシロスコープで次のようになります

サーボケーブルをPWMピンに接続すると、正確に中央の位置に収まります。 もちろん、電源も接続する必要があります。
おわりに
このようにして、200 Hzの周波数で信号を生成することができます。つまり、1つのドライブの反応時間が5 msに短縮されます。 ロックの開閉には重要ではないかもしれませんが、航空機にとっては非常に重要です。 近い将来、モーターとコントローラーを手に入れるか、エカテリンブルク市の優れた読者がそのような実験を貸してくれて、2番目の記事が掲載されることを願っています。
最後まで読んでくれてありがとう。 おやつとして、少しビデオを紹介しましょう。
仕事のデモンストレーション。 右端と左端の位置に合わせた2つのチャンネル。
PWM信号のビデオデモ。
PS
メールで回答し、必要な質問を明確にしてくれたClaudio Mignantiモジュールの作者に深く感謝したいと思います。
サーボドライブと制御信号の回路はwiki.amperka.ruで取得されました 。
追加や要望がある場合は、コメントに書いてください。
UPD: a5bは 、使用されたデバイスの種類に関心があります。 まあ、これは秘密ではありません。 このボードは、EL-M150の中国語版です。 内部のプロセッサはAtheros AR9331です。
mr3020やwr703nなどの一般的なルーターで非常に広く使用されています。
ボードは次のようになります。
