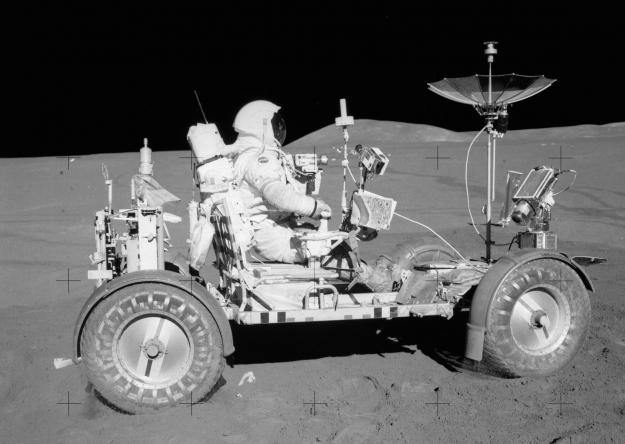
これが、アポロ15ミッションの最初の制御されたローバーの外観であり、ジェットエンジンの
「月面プロジェクト」の最初から、NASAは、月の人間探査のいくつかの段階を計画しました。 最初の段階は、人が乗った宇宙船の往復飛行です。 そのような旅行の技術的実現可能性をテストする。
その後、第1ステージが正常に完了したことを条件に、人の月面に着陸し、その後着陸地域を調査する科学探検も計画されました。 もちろん、足で歩くのは少し大変だったので、車両の使用はプロジェクトの最初から計画されていました。
NASAは多くのことを予測しようとしたため、ローバーの複数のバージョンが同時に設計されました。 同時に、Bell Aerosystemsなどのサードパーティ組織が関与していました。 ジェットエンジンを搭載した空飛ぶ月面探査機のプロジェクトを作成したのはこの会社でした(それ自体では、最も強力ではありません。
初期の月の乗り物の概念
当初から、一部の専門家は、1人用のプラットフォームを作成し、反応の反応原理(エンジンは圧縮空気で動作する)を作成することを提案しました。 システム全体のキーポイントはバランスを取ることでした。このような車両での最初のテスト飛行で宇宙飛行士が逆さまに飛んでしまうと、あまり良くありません。
一般に、これはすべて1951年以来開発されており、さまざまなタイプのプロジェクト(飛行車両だけでなく)が非常に頻繁に提供されました。 そこで、 マーシャルフライトセンターのエンジニアは、 1964年にMOLABとして知られるモバイルラボを提供しました。
さらに、 フォードのエンジニアは、NASAに直ちにワーム型の全範囲のローバーを提供しました。 確かに、これらのローバーは、1回限りの作業ではなく、月での長時間の作業に理想的です。 したがって、プロジェクトは失敗しました。
さて、中程度の期間のミッションのために、 ベル・エアロシステムズは飛行機械を提供しました。 これは最小限のデバイスであり、原則として、最小限のリソースで長距離をカバーするのに最適です。
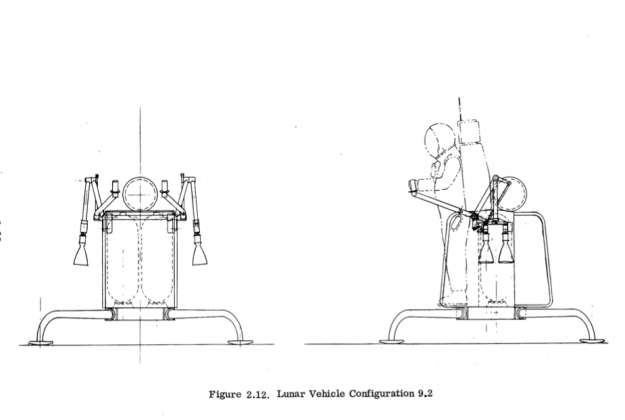 ちなみに、最初は宇宙飛行士が座位にあると想定されていましたが、その後、「立っている」装置を作成することが最善であると判断されました。 このようなデバイスのリソースは30フライトで、総距離(一般にすべてのルートに沿って)は20〜30キロメートルです。 前述のように、バランスは理想的であると想定されており、宇宙飛行士はすべての軸に沿って装置の動きを制御できました。
ちなみに、最初は宇宙飛行士が座位にあると想定されていましたが、その後、「立っている」装置を作成することが最善であると判断されました。 このようなデバイスのリソースは30フライトで、総距離(一般にすべてのルートに沿って)は20〜30キロメートルです。 前述のように、バランスは理想的であると想定されており、宇宙飛行士はすべての軸に沿って装置の動きを制御できました。

これは、月の研究者が飛行装置の設計が成功すれば急上昇する方法です。
飛行中の乗り物は、予期せぬ状況の場合に宇宙飛行士が着陸モジュールにすぐに戻ることができるため、優れていました。
フライングモジュールの設計の最終バージョンは非常に信頼性が高いと評価され、その信頼性はNASAスケールで「スリーナイン」と評価されました。 これは非常に高い評価です。つまり、デバイスの合計動作時間の99.9%が完全に機能します。
同時に、このデバイスは、手に厚い手袋をした不快な宇宙服を着た人が収集するという事実を考慮して開発されました。 とりわけ、輸送中に宇宙船の最小容積を占めるように、装置を折りたたむ必要がありました。
すべてが完璧で、アポロ11号の遠征の後、専門家は飛行機が月の状態に理想的であることを確認しました。
チラシではなくローバー
しかし、物事は計画通りには行きませんでした。 事実、ベル・エアロシステムズの研究が完了する3か月前(プロジェクトは1969年4月7日に会社によって提案されました)、 ヴェルナー・フォン・ブラウンはローバーを設計するチームを設立しました。 フォン・ブラウンは、より伝統的な車両モデルであるローバーは、飛行装置よりも月に適していると信じていました。
そして、ローバーの設計に関する作業が開始された直後、ボーイングとそのような装置を作成する契約が締結されました。 ご存知のように、1971年に3つの月面探査機の最初が月に到達しました。 現場試験により、ローバーは成功したプロジェクトであることが示され、この概念は将来使用されました。
そのため、残念ながら、宇宙飛行士は月に一人で飛ぶことができませんでした。 そして、それは興味深いでしょう、月探査の歴史は少し異なるかもしれません。
経由で